-
101 operations staff
оперативный персонал
Персонал, осуществляющий оперативное управление и обслуживание электроустановок (осмотр, оперативные переключения, подготовку рабочего места, допуск и надзор за работающими, выполнение работ в порядке текущей эксплуатации)
[ПОТ Р М-016-2001]
[РД 153-34.0-03.150-00]5. Управляющие воздействия в АСУ ТП должны вырабатываться автоматически или формироваться ее оперативным персоналом с помощью комплекса средств автоматизации, входящего в систему.
8. При реализации функции аварийного автоматического отключения оборудования в АСУ ТП должна быть обеспечена сигнализация об этом оперативному персоналу с помощью светового и, при необходимости, звукового сигналов с автоматической регистрацией времени отключения.
[ ГОСТ 24.104-85]На гидроэлектростанциях без постоянного дежурства оперативного персонала кроме сигнализации симметричных перегрузок должна быть предусмотрена защита с независимой характеристикой, действующая с большей выдержкой времени на отключение блока (генератора) и с меньшей - на разгрузку.
На подстанциях и гидроэлектростанциях без постоянного дежурства оперативного персонала допускается не устанавливать стационарные показывающие приборы, при этом должны быть предусмотрены места для присоединения переносных приборов специально обученным персоналом.
4.2.37. Распределительные устройства и подстанции с постоянным дежурством персонала, с постоянно находящимся на них оперативно-ремонтным персоналом, а также при наличии вблизи них жилых зданий должны быть обеспечены питьевой водой путем устройства хозяйственно-питьевого водопровода, сооружения артезианских скважин или колодцев
[ПУЭ]Тематики
EN
Англо-русский словарь нормативно-технической терминологии > operations staff
-
102 MES
- система оперативного управления производством
- система документирования медицинской помощи
- подвижная земная станция
подвижная земная станция
Земная станция подвижной спутниковой службы, предназначенная для работы во время движения и (или) во время остановок.
[ОСТ 45.124-2000 ]Тематики
Обобщающие термины
EN
система документирования медицинской помощи
Одна из систем управления Играми. Данная система обеспечивает сбор информации относительно различных уровней медобеспечения и отчетов для организаций по управлению медицинскими службами (медицинской комиссии МОК и др.). Она также предоставляет онлайн-доступ к краткой истории болезни по каждому пациенту.
[Департамент лингвистических услуг Оргкомитета «Сочи 2014». Глоссарий терминов]EN
medical encounters system
MES
One of the Games management systems. The medical encounters system gathers information relative to the different levels of healthcare, generated reports for the medical management organizations (IOC Medical Commission and others) and provides an online summary of each case history.
[Департамент лингвистических услуг Оргкомитета «Сочи 2014». Глоссарий терминов]Тематики
EN
система оперативного управления производством
-
[Интент]Уровень оперативного управления реализуется с помощью MES-систем.
Классический подход при рассмотрении системы класса MES предполагает 11 функций, которыми такая система должна располагать. Эти функции были определены ассоциацией Manufacturing Execution Systems Association (MESA), и подробное их описание можно найти во многих источниках, например в книге Michael McClellan “Applying Manufacturing Execution Systems”.
Вряд ли найдётся ПО, которое в полной мере будет обладать всей необходимой для оперативного управления функциональностью
Поэтому говоря о программных реализациях оперативного управления, нужно прежде всего выделять самые важные для конкретной ситуации функции и выбирать ту систему, которая поможет решить соответствующие задачи. Не исключено, что для реализации определённого набора функций необходимо будет использовать несколько информационных систем, тесно интегрированных между собой.
Приведём пример такого подхода.
В качестве ядра системы оперативного управления производством может выступать классическая MES-система,
например Factelligence компании CIMNET, обладающая полным набором классических MES-функций. Однако существуют программные компонен ты, «заточенные» на решение определённых задач. Если требуется оптимизационное планирование, то функций модуля планирования MES Factelligence может не хватить и нужно использовать решения класса Advanced Planning Systems (APS), например программный продукт Preactor компании Preactor International, в тесной интеграции с MES-системой. На основе созданного в ERP объёмно-календарного плана производства APS-система сформирует оптимизированный по вы бранным критериям цеховой план.
Если стоит задача отслеживать плановые и учитывать оперативные ремонты оборудования, то совместно с MES-системой можно использовать систему класса Enterprise Asset Management (EAM). В этом случае при составлении плана производства будут учитываться связанные с ремонтами и техническим обслуживанием простои оборудования. В качестве EAM-системы может использоваться и решение на базе программного продукта DataStream.
Не всегда классические MES-системы имеют необходимые для решения специальных задач средства визуализации и агрегирования данных. Здесь их функцию могут выполнить системы класса Enterprise Manufacturing Intelligence (EMI). Они позволяют создавать информационную среду, обладающую Web-интерфейсом, предоставляющую доступ к данным о производственных процессах предприятия и ключевым показателям эффективности и помогающую формировать различные виды отчётов о ежедневной деятельности предприятия. На основе полученной информации EMI-системы позволяют менеджерам принимать своевременные решения, направленные на увеличение эффективности производства и повышение качества выпускаемой продукции. Системы класса EMI позволяют собирать и анализировать данные не только с одного АРМ, линии или завода, но и с нескольких предприятий, расположенных как в одной стране, так и географически распределённых по всему миру. Представителем класса EMI-решений является система ActivePlant.
Решения задач оперативного управления производством невозможно реализовать в полной мере без системы, обеспечивающей получение фактических данных о проходящих на производстве процессах, обработки этих данных и передачи их для анализа, например, в MES систему. Безусловно, в любую ERP- или MES-систему можно ввести подобные данные вручную. Но минусы такого подхода очевидны: это низкая оперативность, высокая вероятность случайных и предумышленных ошибок. Во избежание этих минусов можно реализовать интеграцию MES-уровня с АСУ ТП. В этом случае на систему АСУ ТП возлагается не столько функция управления технологическим процессом, сколько функция регистрации событий, обработки полученной информации, её хранения и предоставления на верхние уровни информационной структуры в требуемом виде.
Таким образом, получаем структуру, изображённую на рис. 2.
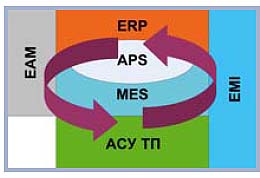
Рис. 2. Структура, решающая задачи оперативного управления производствомВсе компоненты, входящие в эту структуру, принимают участие в решении задач оперативного управления производством. Грани, которыми они соприкасаются, — это области интеграции, где информационные потоки объединяют такие, на первый взгляд, разные программно-аппаратные структуры. Как видно, решаемые задачи охватываются различными программными решениями, и совсем не обязательно, что это будут классические, с точки зрения ассоциации MESA, 11 функций MES-системы. Выбор того, какими средствами будут решаться отдельные задачи, должен производиться очень тщательно, после всестороннего изучения бизнес-процессов, протекающих на предприятии. Поэтому важным элементом успешного внедрения такой комплексной системы, кроме технической реализации, является её организационная реализация.
[Владимир Демидов. Решение задач оперативного управления производством на различных уровнях информационной структуры предприятия. СТА 1/2006]Тематики
EN
Англо-русский словарь нормативно-технической терминологии > MES
-
103 field bus
полевая шина
-
[Интент]
полевая магистраль по зарубежной терминологии
Имеет много терминов-синонимов и обозначает специализированные последовательные магистрали малых локальных сетей (МЛС), ориентированны на сопряжение с ЭВМ рассредоточенных цифровых датчиков и исполнительных органов. Магистрали рассчитаны на применение в машиностроении, химической промышленности, в системах автоматизации зданий, крупных установках, бытовых электронных системах, системах автомобильного оборудования, малых контрольно-измерительных и управляющих системах на основе встраиваемых микроЭВМ и т. п. Основными магистралями являются Bitbus, MIL STD-1553В. В настоящее время рабочими группами IEC (65С и SP-50) стандартизируются два основных типа МЛС: высокоскоростные и низкоскоростные, ориентированные на датчики.
[Е.С.Алексеев, А.А.Мячев. Англо-русский толковый словарь по системотехнике ЭВМ. Москва 1993]ЧТО ТАКОЕ FIELDВUS?
Так пишется оригинальный термин, который в русском переводе звучит как «промышленная сеть». Fieldbus — это не какой-то определенный протокол передачи данных и не тип сетевой архитектуры, этот термин не принадлежит ни одной отдельно взятой компании и обозначает скорее сферу применения, чем какую-либо конкретную сетевую технологию.
Давайте попробуем сформулировать лишь некоторые основные требования, которые можно предъявить к «идеальной» промышленной сети.
1. Производительность.
2. Предсказуемость времени доставки информации.
3. Помехоустойчивость.
4. Доступность и простота организации физического канала передачи данных.
5. Максимальный сервис для приложений верхнего уровня.
6. Минимальная стоимость устройств аппаратной реализации, особенно на уровне контроллеров.
7. Возможность получения «распределенного интеллекта», путем предоставления максимального доступа к каналу нескольким ведущим узлам.
8.Управляемость и самовосстановление в случае возникновения нештатных ситуаций.
[Сергей Гусев. Краткий экскурс в историю промышленных сетей]
Международный стандарт IEC 61158 “Fieldbus for use in Industrial Control Systems” («Промышленная управляющая сеть для применения в промышленных системах управления») определяет восемь независимых и несовместимых коммуникационных технологий, из которых FOUNDATION Fieldbus H1 и PROFIBUS PA стали в значительной степени преобладающими в различных отраслях промышленности.
Эти промышленные сети соответствуют требованиям стандарта IEC 61158 2, который устанавливает физический уровень так называемых промышленных сетей H1.
Основными требованиями к промышленным сетям H1 являются:
● передача данных и питание устройств нижнего уровня по одной витой паре;
● гибкость при проектировании различных топологий сети;
● совместимость всех полевых приборов;
● взрывобезопасность при установкево взрывоопасных зонах;
● распределение одной инфраструктуры на многочисленные сегменты.[Виктор Жданкин. Концепция FieldConnex® для промышленных сетей FOUNDATION Fieldbus H1 и PROFIBUS_PA: повышение производительности и снижение затрат. СТА 2/2009]
Термин полевая шина является дословным переводом английского термина fieldbus.
Термин промышленная сеть является более точным переводом и в настоящее время именно он используется в профессиональной технической литературе.Промышленная сеть — сеть передачи данных, связывающая различные датчики, исполнительные механизмы, промышленные контроллеры и используемая в промышленной автоматизации. Термин употребляется преимущественно в автоматизированной системе управления технологическими процессами (АСУТП).
Устройства используют сеть для:
- передачи данных, между датчиками, контроллерами и исполнительными механизмами;
- диагностики и удалённого конфигурирования датчиков и исполнительных механизмов;
- калибрования датчиков;
- питания датчиков и исполнительных механизмов;
- связи между датчиками, исполнительными механизмами, ПЛК и АСУ ТП верхнего уровня.
В промышленных сетях для передачи данных применяют:
- электрические линии;
- волоконно-оптические линии;
- беспроводную связь (радиомодемы и Wi-Fi).
Промышленные сети могут взаимодействовать с обычными компьютерными сетями, в частности использовать глобальную сеть Internet.
[ Википедия]
Главной функцией полевой шины является обеспечение сетевого взаимодействия между контроллерами и удаленной периферией (например, узлами ввода/вывода). Помимо этого, к полевой шине могут подключаться различные контрольно-измерительные приборы ( Field Devices), снабженные соответствующими сетевыми интерфейсами. Такие устройства часто называют интеллектуальными ( Intelligent Field Devices), так как они поддерживают высокоуровневые протоколы сетевого обмена.
Пример полевой шины представлен на рисунке 1.
Рис. 1. Полевая шина.Как уже было отмечено, существует множество стандартов полевых шин, наиболее распространенные из которых приведены ниже:
1. Profibus DP
2. Profibus PA
3. Foundation Fieldbus
4. Modbus RTU
5. HART
6. DeviceNet
Несмотря на нюансы реализации каждого из стандартов (скорость передачи данных, формат кадра, физическая среда), у них есть одна общая черта – используемый алгоритм сетевого обмена данными, основанный на классическом принципе Master-Slave или его небольших модификациях.
Современные полевые шины удовлетворяют строгим техническим требованиям, благодаря чему становится возможной их эксплуатация в тяжелых промышленных условиях. К этим требованиям относятся:- Детерминированность. Под этим подразумевается, что передача сообщения из одного узла сети в другой занимает строго фиксированный отрезок времени. Офисные сети, построенные по технологии Ethernet, - это отличный пример недетерминированной сети. Сам алгоритм доступа к разделяемой среде по методу CSMA/CD не определяет время, за которое кадр из одного узла сети будет передан другому, и, строго говоря, нет никаких гарантий, что кадр вообще дойдет до адресата. Для промышленных сетей это недопустимо. Время передачи сообщения должно быть ограничено и в общем случае, с учетом количества узлов, скорости передачи данных и длины сообщений, может быть заранее рассчитано.
- Поддержка больших расстояний. Это существенное требование, ведь расстояние между объектами управления может порой достигать нескольких километров. Применяемый протокол должен быть ориентирован на использование в сетях большой протяженности.
- Защита от электромагнитных наводок. Длинные линии в особенности подвержены пагубному влиянию электромагнитных помех, излучаемых различными электрическими агрегатами. Сильные помехи в линии могут исказить передаваемые данные до неузнаваемости. Для защиты от таких помех применяют специальные экранированные кабели, а также оптоволокно, которое, в силу световой природы информационного сигнала, вообще нечувствительно к электромагнитным наводкам. Кроме этого, в промышленных сетях должны использоваться специальные методы цифрового кодирования данных, препятствующие их искажению в процессе передачи или, по крайней мере, позволяющие эффективно детектировать искаженные данные принимающим узлом.
- Упрочненная механическая конструкция кабелей и соединителей. Здесь тоже нет ничего удивительного, если представить, в каких условиях зачастую приходиться прокладывать коммуникационные линии. Кабели и соединители должны быть прочными, долговечными и приспособленными для использования в самых тяжелых окружающих условиях (в том числе агрессивных атмосферах).
По типу физической среды полевые шины делятся на два типа:
-
Полевые шины, построенные на базе оптоволоконного кабеля.
Преимущества использования оптоволокна очевидны: возможность построения протяженных коммуникационных линий (протяженностью до 10 км и более); большая полоса пропускания; иммунитет к электромагнитным помехам; возможность прокладки во взрывоопасных зонах.
Недостатки: относительно высокая стоимость кабеля; сложность физического подключения и соединения кабелей. Эти работы должны выполняться квалифицированными специалистами. -
Полевые шины, построенные на базе медного кабеля.
Как правило, это двухпроводной кабель типа “витая пара” со специальной изоляцией и экранированием. Преимущества: удобоваримая цена; легкость прокладки и выполнения физических соединений. Недостатки: подвержен влиянию электромагнитных наводок; ограниченная протяженность кабельных линий; меньшая по сравнению с оптоволокном полоса пропускания.
Итак, перейдем к рассмотрению методов обеспечения отказоустойчивости коммуникационных сетей, применяемых на полевом уровне. При проектировании и реализации этот аспект становится ключевым, так как в большой степени определяет характеристики надежности всей системы управления в целом.
На рисунке 2 изображена базовая архитектура полевой шины – одиночная (нерезервированная). Шина связывает контроллер С1 и четыре узла ввода/вывода IO1-IO4. Очевидно, что такая архитектура наименее отказоустойчива, так как обрыв шины, в зависимости от его локализации, ведет к потере коммуникации с одним, несколькими или всеми узлами шины. В нашем случае в результате обрыва теряется связь с двумя узлами.
Рис. 2. Нерезервированная шина.Здесь важное значение имеет термин “единичная точка отказа” (SPOF, single point of failure). Под этим понимается место в системе, отказ компонента или обрыв связи в котором приводит к нарушению работы всей системы. На рисунке 2 единичная точка отказа обозначена красным крестиком.
На рисунке 3 показана конфигурация в виде дублированной полевой шины, связывающей резервированный контроллер с узлами ввода/вывода. Каждый узел ввода/вывода снабжен двумя интерфейсными модулями. Если не считать сами модули ввода/вывода, которые резервируются редко, в данной конфигурации единичной точки отказа нет.
Рис. 3. Резервированная шина.Вообще, при построении отказоустойчивых АСУ ТП стараются, чтобы единичный отказ в любом компоненте (линии связи) не влиял на работу всей системы. В этом плане конфигурация в виде дублированной полевой шины является наиболее распространенным техническим решением.
На рисунке 4 показана конфигурация в виде оптоволоконного кольца. Контроллер и узлы ввода/вывода подключены к кольцу с помощью резервированных медных сегментов. Для состыковки медных сегментов сети с оптоволоконными применяются специальные конверторы среды передачи данных “медь<->оптоволокно” (OLM, Optical Link Module). Для каждого из стандартных протоколов можно выбрать соответствующий OLM.
Рис. 4. Одинарное оптоволоконное кольцо.Как и дублированная шина, оптоволоконное кольцо устойчиво к возникновению одного обрыва в любом его месте. Система такой обрыв вообще не заметит, и переключение на резервные интерфейсные и коммуникационные модули не произойдет. Более того, обрыв одного из двух медных сегментов, соединяющих узел с оптоволоконным кольцом, не приведет к потере связи с этим узлом. Однако второй обрыв кольца может привести к неработоспособности системы. В общем случае два обрыва кольца в диаметрально противоположных точках ведут к потере коммуникации с половиной подключенных узлов.
На рисунке 5 изображена конфигурация с двойным оптическим кольцом. В случае если в результате образования двух точек обрыва первичное кольцо выходит из строя, система переключается на вторичное кольцо. Очевидно, что такая архитектура сети является наиболее отказоустойчивой. На рисунке 5 пошагово изображен процесс деградации сети. Обратите внимание, сколько отказов система может перенести до того, как выйдет из строя.
Рис. 5. Резервированное оптоволоконное кольцо.[ http://kazanets.narod.ru/NT_PART1.htm]
Тематики
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > field bus
-
104 fieldbus
полевая шина
-
[Интент]
полевая магистраль по зарубежной терминологии
Имеет много терминов-синонимов и обозначает специализированные последовательные магистрали малых локальных сетей (МЛС), ориентированны на сопряжение с ЭВМ рассредоточенных цифровых датчиков и исполнительных органов. Магистрали рассчитаны на применение в машиностроении, химической промышленности, в системах автоматизации зданий, крупных установках, бытовых электронных системах, системах автомобильного оборудования, малых контрольно-измерительных и управляющих системах на основе встраиваемых микроЭВМ и т. п. Основными магистралями являются Bitbus, MIL STD-1553В. В настоящее время рабочими группами IEC (65С и SP-50) стандартизируются два основных типа МЛС: высокоскоростные и низкоскоростные, ориентированные на датчики.
[Е.С.Алексеев, А.А.Мячев. Англо-русский толковый словарь по системотехнике ЭВМ. Москва 1993]ЧТО ТАКОЕ FIELDВUS?
Так пишется оригинальный термин, который в русском переводе звучит как «промышленная сеть». Fieldbus — это не какой-то определенный протокол передачи данных и не тип сетевой архитектуры, этот термин не принадлежит ни одной отдельно взятой компании и обозначает скорее сферу применения, чем какую-либо конкретную сетевую технологию.
Давайте попробуем сформулировать лишь некоторые основные требования, которые можно предъявить к «идеальной» промышленной сети.
1. Производительность.
2. Предсказуемость времени доставки информации.
3. Помехоустойчивость.
4. Доступность и простота организации физического канала передачи данных.
5. Максимальный сервис для приложений верхнего уровня.
6. Минимальная стоимость устройств аппаратной реализации, особенно на уровне контроллеров.
7. Возможность получения «распределенного интеллекта», путем предоставления максимального доступа к каналу нескольким ведущим узлам.
8.Управляемость и самовосстановление в случае возникновения нештатных ситуаций.
[Сергей Гусев. Краткий экскурс в историю промышленных сетей]
Международный стандарт IEC 61158 “Fieldbus for use in Industrial Control Systems” («Промышленная управляющая сеть для применения в промышленных системах управления») определяет восемь независимых и несовместимых коммуникационных технологий, из которых FOUNDATION Fieldbus H1 и PROFIBUS PA стали в значительной степени преобладающими в различных отраслях промышленности.
Эти промышленные сети соответствуют требованиям стандарта IEC 61158 2, который устанавливает физический уровень так называемых промышленных сетей H1.
Основными требованиями к промышленным сетям H1 являются:
● передача данных и питание устройств нижнего уровня по одной витой паре;
● гибкость при проектировании различных топологий сети;
● совместимость всех полевых приборов;
● взрывобезопасность при установкево взрывоопасных зонах;
● распределение одной инфраструктуры на многочисленные сегменты.[Виктор Жданкин. Концепция FieldConnex® для промышленных сетей FOUNDATION Fieldbus H1 и PROFIBUS_PA: повышение производительности и снижение затрат. СТА 2/2009]
Термин полевая шина является дословным переводом английского термина fieldbus.
Термин промышленная сеть является более точным переводом и в настоящее время именно он используется в профессиональной технической литературе.Промышленная сеть — сеть передачи данных, связывающая различные датчики, исполнительные механизмы, промышленные контроллеры и используемая в промышленной автоматизации. Термин употребляется преимущественно в автоматизированной системе управления технологическими процессами (АСУТП).
Устройства используют сеть для:
- передачи данных, между датчиками, контроллерами и исполнительными механизмами;
- диагностики и удалённого конфигурирования датчиков и исполнительных механизмов;
- калибрования датчиков;
- питания датчиков и исполнительных механизмов;
- связи между датчиками, исполнительными механизмами, ПЛК и АСУ ТП верхнего уровня.
В промышленных сетях для передачи данных применяют:
- электрические линии;
- волоконно-оптические линии;
- беспроводную связь (радиомодемы и Wi-Fi).
Промышленные сети могут взаимодействовать с обычными компьютерными сетями, в частности использовать глобальную сеть Internet.
[ Википедия]
Главной функцией полевой шины является обеспечение сетевого взаимодействия между контроллерами и удаленной периферией (например, узлами ввода/вывода). Помимо этого, к полевой шине могут подключаться различные контрольно-измерительные приборы ( Field Devices), снабженные соответствующими сетевыми интерфейсами. Такие устройства часто называют интеллектуальными ( Intelligent Field Devices), так как они поддерживают высокоуровневые протоколы сетевого обмена.
Пример полевой шины представлен на рисунке 1.
Рис. 1. Полевая шина.Как уже было отмечено, существует множество стандартов полевых шин, наиболее распространенные из которых приведены ниже:
1. Profibus DP
2. Profibus PA
3. Foundation Fieldbus
4. Modbus RTU
5. HART
6. DeviceNet
Несмотря на нюансы реализации каждого из стандартов (скорость передачи данных, формат кадра, физическая среда), у них есть одна общая черта – используемый алгоритм сетевого обмена данными, основанный на классическом принципе Master-Slave или его небольших модификациях.
Современные полевые шины удовлетворяют строгим техническим требованиям, благодаря чему становится возможной их эксплуатация в тяжелых промышленных условиях. К этим требованиям относятся:- Детерминированность. Под этим подразумевается, что передача сообщения из одного узла сети в другой занимает строго фиксированный отрезок времени. Офисные сети, построенные по технологии Ethernet, - это отличный пример недетерминированной сети. Сам алгоритм доступа к разделяемой среде по методу CSMA/CD не определяет время, за которое кадр из одного узла сети будет передан другому, и, строго говоря, нет никаких гарантий, что кадр вообще дойдет до адресата. Для промышленных сетей это недопустимо. Время передачи сообщения должно быть ограничено и в общем случае, с учетом количества узлов, скорости передачи данных и длины сообщений, может быть заранее рассчитано.
- Поддержка больших расстояний. Это существенное требование, ведь расстояние между объектами управления может порой достигать нескольких километров. Применяемый протокол должен быть ориентирован на использование в сетях большой протяженности.
- Защита от электромагнитных наводок. Длинные линии в особенности подвержены пагубному влиянию электромагнитных помех, излучаемых различными электрическими агрегатами. Сильные помехи в линии могут исказить передаваемые данные до неузнаваемости. Для защиты от таких помех применяют специальные экранированные кабели, а также оптоволокно, которое, в силу световой природы информационного сигнала, вообще нечувствительно к электромагнитным наводкам. Кроме этого, в промышленных сетях должны использоваться специальные методы цифрового кодирования данных, препятствующие их искажению в процессе передачи или, по крайней мере, позволяющие эффективно детектировать искаженные данные принимающим узлом.
- Упрочненная механическая конструкция кабелей и соединителей. Здесь тоже нет ничего удивительного, если представить, в каких условиях зачастую приходиться прокладывать коммуникационные линии. Кабели и соединители должны быть прочными, долговечными и приспособленными для использования в самых тяжелых окружающих условиях (в том числе агрессивных атмосферах).
По типу физической среды полевые шины делятся на два типа:
-
Полевые шины, построенные на базе оптоволоконного кабеля.
Преимущества использования оптоволокна очевидны: возможность построения протяженных коммуникационных линий (протяженностью до 10 км и более); большая полоса пропускания; иммунитет к электромагнитным помехам; возможность прокладки во взрывоопасных зонах.
Недостатки: относительно высокая стоимость кабеля; сложность физического подключения и соединения кабелей. Эти работы должны выполняться квалифицированными специалистами. -
Полевые шины, построенные на базе медного кабеля.
Как правило, это двухпроводной кабель типа “витая пара” со специальной изоляцией и экранированием. Преимущества: удобоваримая цена; легкость прокладки и выполнения физических соединений. Недостатки: подвержен влиянию электромагнитных наводок; ограниченная протяженность кабельных линий; меньшая по сравнению с оптоволокном полоса пропускания.
Итак, перейдем к рассмотрению методов обеспечения отказоустойчивости коммуникационных сетей, применяемых на полевом уровне. При проектировании и реализации этот аспект становится ключевым, так как в большой степени определяет характеристики надежности всей системы управления в целом.
На рисунке 2 изображена базовая архитектура полевой шины – одиночная (нерезервированная). Шина связывает контроллер С1 и четыре узла ввода/вывода IO1-IO4. Очевидно, что такая архитектура наименее отказоустойчива, так как обрыв шины, в зависимости от его локализации, ведет к потере коммуникации с одним, несколькими или всеми узлами шины. В нашем случае в результате обрыва теряется связь с двумя узлами.
Рис. 2. Нерезервированная шина.Здесь важное значение имеет термин “единичная точка отказа” (SPOF, single point of failure). Под этим понимается место в системе, отказ компонента или обрыв связи в котором приводит к нарушению работы всей системы. На рисунке 2 единичная точка отказа обозначена красным крестиком.
На рисунке 3 показана конфигурация в виде дублированной полевой шины, связывающей резервированный контроллер с узлами ввода/вывода. Каждый узел ввода/вывода снабжен двумя интерфейсными модулями. Если не считать сами модули ввода/вывода, которые резервируются редко, в данной конфигурации единичной точки отказа нет.
Рис. 3. Резервированная шина.Вообще, при построении отказоустойчивых АСУ ТП стараются, чтобы единичный отказ в любом компоненте (линии связи) не влиял на работу всей системы. В этом плане конфигурация в виде дублированной полевой шины является наиболее распространенным техническим решением.
На рисунке 4 показана конфигурация в виде оптоволоконного кольца. Контроллер и узлы ввода/вывода подключены к кольцу с помощью резервированных медных сегментов. Для состыковки медных сегментов сети с оптоволоконными применяются специальные конверторы среды передачи данных “медь<->оптоволокно” (OLM, Optical Link Module). Для каждого из стандартных протоколов можно выбрать соответствующий OLM.
Рис. 4. Одинарное оптоволоконное кольцо.Как и дублированная шина, оптоволоконное кольцо устойчиво к возникновению одного обрыва в любом его месте. Система такой обрыв вообще не заметит, и переключение на резервные интерфейсные и коммуникационные модули не произойдет. Более того, обрыв одного из двух медных сегментов, соединяющих узел с оптоволоконным кольцом, не приведет к потере связи с этим узлом. Однако второй обрыв кольца может привести к неработоспособности системы. В общем случае два обрыва кольца в диаметрально противоположных точках ведут к потере коммуникации с половиной подключенных узлов.
На рисунке 5 изображена конфигурация с двойным оптическим кольцом. В случае если в результате образования двух точек обрыва первичное кольцо выходит из строя, система переключается на вторичное кольцо. Очевидно, что такая архитектура сети является наиболее отказоустойчивой. На рисунке 5 пошагово изображен процесс деградации сети. Обратите внимание, сколько отказов система может перенести до того, как выйдет из строя.
Рис. 5. Резервированное оптоволоконное кольцо.[ http://kazanets.narod.ru/NT_PART1.htm]
Тематики
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > fieldbus
-
105 programmable controller
программируемый контроллер
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего. Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы. Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7. Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series. Рис. 4. Резервированный контроллер FCP270.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA). Рис. 5. Контроллер AC800M.
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > programmable controller
106 storage-programmable logic controller
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > storage-programmable logic controller
107 process systems team leader
Англо-русский словарь нормативно-технической терминологии > process systems team leader
108 Manufacturing Execution Systems
система оперативного управления производством
-
[Интент]Уровень оперативного управления реализуется с помощью MES-систем.
Классический подход при рассмотрении системы класса MES предполагает 11 функций, которыми такая система должна располагать. Эти функции были определены ассоциацией Manufacturing Execution Systems Association (MESA), и подробное их описание можно найти во многих источниках, например в книге Michael McClellan “Applying Manufacturing Execution Systems”.
Вряд ли найдётся ПО, которое в полной мере будет обладать всей необходимой для оперативного управления функциональностью
Поэтому говоря о программных реализациях оперативного управления, нужно прежде всего выделять самые важные для конкретной ситуации функции и выбирать ту систему, которая поможет решить соответствующие задачи. Не исключено, что для реализации определённого набора функций необходимо будет использовать несколько информационных систем, тесно интегрированных между собой.
Приведём пример такого подхода.
В качестве ядра системы оперативного управления производством может выступать классическая MES-система,
например Factelligence компании CIMNET, обладающая полным набором классических MES-функций. Однако существуют программные компонен ты, «заточенные» на решение определённых задач. Если требуется оптимизационное планирование, то функций модуля планирования MES Factelligence может не хватить и нужно использовать решения класса Advanced Planning Systems (APS), например программный продукт Preactor компании Preactor International, в тесной интеграции с MES-системой. На основе созданного в ERP объёмно-календарного плана производства APS-система сформирует оптимизированный по вы бранным критериям цеховой план.
Если стоит задача отслеживать плановые и учитывать оперативные ремонты оборудования, то совместно с MES-системой можно использовать систему класса Enterprise Asset Management (EAM). В этом случае при составлении плана производства будут учитываться связанные с ремонтами и техническим обслуживанием простои оборудования. В качестве EAM-системы может использоваться и решение на базе программного продукта DataStream.
Не всегда классические MES-системы имеют необходимые для решения специальных задач средства визуализации и агрегирования данных. Здесь их функцию могут выполнить системы класса Enterprise Manufacturing Intelligence (EMI). Они позволяют создавать информационную среду, обладающую Web-интерфейсом, предоставляющую доступ к данным о производственных процессах предприятия и ключевым показателям эффективности и помогающую формировать различные виды отчётов о ежедневной деятельности предприятия. На основе полученной информации EMI-системы позволяют менеджерам принимать своевременные решения, направленные на увеличение эффективности производства и повышение качества выпускаемой продукции. Системы класса EMI позволяют собирать и анализировать данные не только с одного АРМ, линии или завода, но и с нескольких предприятий, расположенных как в одной стране, так и географически распределённых по всему миру. Представителем класса EMI-решений является система ActivePlant.
Решения задач оперативного управления производством невозможно реализовать в полной мере без системы, обеспечивающей получение фактических данных о проходящих на производстве процессах, обработки этих данных и передачи их для анализа, например, в MES систему. Безусловно, в любую ERP- или MES-систему можно ввести подобные данные вручную. Но минусы такого подхода очевидны: это низкая оперативность, высокая вероятность случайных и предумышленных ошибок. Во избежание этих минусов можно реализовать интеграцию MES-уровня с АСУ ТП. В этом случае на систему АСУ ТП возлагается не столько функция управления технологическим процессом, сколько функция регистрации событий, обработки полученной информации, её хранения и предоставления на верхние уровни информационной структуры в требуемом виде.
Таким образом, получаем структуру, изображённую на рис. 2.
Рис. 2. Структура, решающая задачи оперативного управления производствомВсе компоненты, входящие в эту структуру, принимают участие в решении задач оперативного управления производством. Грани, которыми они соприкасаются, — это области интеграции, где информационные потоки объединяют такие, на первый взгляд, разные программно-аппаратные структуры. Как видно, решаемые задачи охватываются различными программными решениями, и совсем не обязательно, что это будут классические, с точки зрения ассоциации MESA, 11 функций MES-системы. Выбор того, какими средствами будут решаться отдельные задачи, должен производиться очень тщательно, после всестороннего изучения бизнес-процессов, протекающих на предприятии. Поэтому важным элементом успешного внедрения такой комплексной системы, кроме технической реализации, является её организационная реализация.
[Владимир Демидов. Решение задач оперативного управления производством на различных уровнях информационной структуры предприятия. СТА 1/2006]Тематики
EN
Англо-русский словарь нормативно-технической терминологии > Manufacturing Execution Systems
109 electronic starter
устройство плавного пуска
-
[Интент]Устройства УБПВД-ВЦ предназначены для плавного пуска высоковольтных асинхронных и синхронных электродвигателей механизмов с "вентиляторной" (квадратично зависимой от скорости) характеристикой нагрузочного момента (центробежные компрессоры, насосы, вентиляторы, дымососы, эксгаустеры и другие аналогичные механизмы).Функции
Устройства плавного пуска УБПВД-ВЦ обеспечивают:
- проверку исправности тиристоров перед началом пуска двигателя;
- плавное нарастание тока двигателя до величины начального токоограничения, обеспечивающего трогание двигателя с места;
- формирование заданного токоограничения по времени для обеспечения разгона электродвигателя;
- фиксацию окончания разгона и выдачу сигнала на включение высоковольтного выключателя, подключающего двигатель напрямую к сети по окончании разгона;
- контроль времени разгона двигателя и выдачу сигнала на прекращение пуска при превышении заданного времени разгона.
Устройства плавного пуска УБПВД-ВЦ обеспечивает следующие виды защит:
•максимально-токовую;
•время-токовую;
•от превышения заданного времени пуска двигателя;
•от обрыва фазы главных цепей и неполнофазного пуска;
•от неисправности тиристоров;
•от неисправности устройств формирования импульсов управления тиристорами.
Основные особенности конструкции и принцип работы устройств плавного пуска
Устройства, выполненные по принципу тиристорного регулятора напряжения, обеспечивают ограничение скорости нарастания и значения пускового тока электродвигателя изменением углов отпирания тиристоров через систему импульсно-фазового управления (СИФУ). В течение заданного времени пуска электродвигателя происходит плавное нарастание напряжения на обмотках статора от нуля до номинального значения.
Пусковой ток увеличивается плавно с заданным токоограничением, не создавая ударных электромагнитных моментов, отрицательно сказывающихся на электродвигателе и механизме.
Устройства плавного пуска УБПВД-ВЦ имеют цифровую систему управления, обеспечивающую удобное программирование настройки параметров.
В устройствах плавного пуска предусмотрена связь по высокопроизводительному интерфейсу RS-485 для возможности дистанционного управления от АСУ ТП. Использование удобного пользовательского интерфейса обеспечивает максимально-улучшенные сервисно-эксплуатационные характеристики устройств плавного пуска.
Силовая часть устройств состоит из трех тиристорных высоковольтных блоков, установленных на выкатных элементах в каждой фазе главных цепей устройства, высоковольтных разъединителей, позволяющих отключать вводы и выводы устройства, высоковольтных трансформаторов тока для обеспечения обратной связи по току и ограничителей напряжения на вводе устройства, соединенных в звезду, и вводе-выводе тиристорных высоковольтных блоков.
Каждый тиристорный высоковольтный блок содержит два силовых блока из трех (для исполнений на 6 кВ) и из пяти (для исполнений на 10 кВ) последовательно-соединенных высоковольтных тиристоров. Тиристоры выбраны с таким расчетом, что при выходе из строя одного тиристора в каждом из силовых блоков ("закоротка" во время работы). Устройство остается работоспособным, а оставшиеся в работе тиристоры в закрытом состоянии выдерживают рабочее напряжение.
Силовые блоки включены встречно-параллельно и каждый тиристор одного блока соединен с соседним другого блока, образуя реверсивные пары, состояние каждой из которых контролируются блоками контроля с высоковольтной оптронной развязкой. Информация об исправном состоянии тиристоров перед пуском разрешает начать процесс регулируемого пуска двигателя (сигнализация "Разрешение включения"). Для постоянного контроля состояния тиристоров может быть введён дополнительно блок высоковольтных резисторов, подключаемый к выводам тиристорных высоковольтных блоков.
ВТБ – высоковольтные тиристорные блоки
QSл – линейный разъединитель
QSш – шинный разъединитель
ОПН – ограничитель напряжений
ТТ – трансформатор тока
Высоковольтные R-C цепи подключаются к каждой реверсивной паре тиристоров для защиты последних от коммутационных перенапряжений.
Для выравнивания напряжений между последовательно соединенными парами тиристоров в закрытом состоянии предусмотрены делители напряжения на высоковольтных резисторах, включенных последовательно с входными цепями высоковольтных оптронных развязок, параллельно которым установлены защитные стабилитроны.
К зажимам "управляющий электрод-катод" силовых тиристоров подключены блоки ввода высоковольтных импульсных развязывающих трансформаторов, первичные обмотки которых для управления каждым силовым блоком соединены по схеме токовой петли. По этой схеме во всех блоках ввода одной токовой петли вырабатываются импульсы управления тиристорами одного силового блока для одновременного отпирания последних.
В устройствах плавного пуска УБПВД-ВЦ предусмотрены 4 регулируемые уставки начального токоограничения с равномерной шкалой от 1,0 до 4,0 Iном для обеспечения возможности запуска с помощью одного устройства нескольких двигателей разной мощности, а также регулируемые уставки времени разгона в пределах до 60 с, выбираемые дистанционно.
В устройствах плавного пуска предусмотрена связь по высокопроизводительному интерфейсу RS-485 для возможности дистанционного управления от АСУ ТП. Использование удобного пользовательского интерфейса обеспечивает максимально-улучшенные сервисно-эксплуатационные характеристики устройства.
Устройства плавного пуска УБПВД-ВЦ имеют следующие виды сигнализации:
•"Готовность" - готовность устройства к работе;
•"Окончание пуска" - завершение пуска;
•"Окончание разгона" - завершение разгона;
•"Разрешение включения" - исправность тиристоров главных цепей устройства перед пуском двигателя;
•"Отключение РВЗ разрешено" (РВЗ – разъединитель высоковольтный с заземлителем);
•"Отключение РВЗ запрещено".
Номинальное напряжение вспомогательных цепей устройства: трехфазное переменного тока (линейное) - 100 В, однофазное – 220 В.
Допустимые колебания: напряжения вспомогательных цепей от плюс 10% до минус 40% от номинального значения, частоты 2% от номинального значения.
Допустимые колебания напряжений силовых цепей 6 кВ и 10 кВ должны соответствовать ГОСТ 13109.
Электрическая прочность изоляции силовых цепей устройств плавного пуска соответствует ГОСТ 1516.1 и выдерживает испытательное напряжение переменного тока частотой 50 Гц 32 кВ (для устройств с номинальным напряжением главных цепей класса 6 кВ) и 42 кВ (для устройств с номинальным напряжением главных цепей класса 10 кВ), цепей управления, блокировки и сигнализации – 2 кВ.
[ http://www.korabel.ru/news/comments/ustroystva_plavnogo_puska_ubpvd-vts_ot_kompanii_vniir.html]Недопустимые, нерекомендуемые
Примечание(1)- По мнению автора карточкиТематики
EN
Англо-русский словарь нормативно-технической терминологии > electronic starter
110 semiconductor motor starter
устройство плавного пуска
-
[Интент]Устройства УБПВД-ВЦ предназначены для плавного пуска высоковольтных асинхронных и синхронных электродвигателей механизмов с "вентиляторной" (квадратично зависимой от скорости) характеристикой нагрузочного момента (центробежные компрессоры, насосы, вентиляторы, дымососы, эксгаустеры и другие аналогичные механизмы).Функции
Устройства плавного пуска УБПВД-ВЦ обеспечивают:
- проверку исправности тиристоров перед началом пуска двигателя;
- плавное нарастание тока двигателя до величины начального токоограничения, обеспечивающего трогание двигателя с места;
- формирование заданного токоограничения по времени для обеспечения разгона электродвигателя;
- фиксацию окончания разгона и выдачу сигнала на включение высоковольтного выключателя, подключающего двигатель напрямую к сети по окончании разгона;
- контроль времени разгона двигателя и выдачу сигнала на прекращение пуска при превышении заданного времени разгона.
Устройства плавного пуска УБПВД-ВЦ обеспечивает следующие виды защит:
•максимально-токовую;
•время-токовую;
•от превышения заданного времени пуска двигателя;
•от обрыва фазы главных цепей и неполнофазного пуска;
•от неисправности тиристоров;
•от неисправности устройств формирования импульсов управления тиристорами.
Основные особенности конструкции и принцип работы устройств плавного пуска
Устройства, выполненные по принципу тиристорного регулятора напряжения, обеспечивают ограничение скорости нарастания и значения пускового тока электродвигателя изменением углов отпирания тиристоров через систему импульсно-фазового управления (СИФУ). В течение заданного времени пуска электродвигателя происходит плавное нарастание напряжения на обмотках статора от нуля до номинального значения.
Пусковой ток увеличивается плавно с заданным токоограничением, не создавая ударных электромагнитных моментов, отрицательно сказывающихся на электродвигателе и механизме.
Устройства плавного пуска УБПВД-ВЦ имеют цифровую систему управления, обеспечивающую удобное программирование настройки параметров.
В устройствах плавного пуска предусмотрена связь по высокопроизводительному интерфейсу RS-485 для возможности дистанционного управления от АСУ ТП. Использование удобного пользовательского интерфейса обеспечивает максимально-улучшенные сервисно-эксплуатационные характеристики устройств плавного пуска.
Силовая часть устройств состоит из трех тиристорных высоковольтных блоков, установленных на выкатных элементах в каждой фазе главных цепей устройства, высоковольтных разъединителей, позволяющих отключать вводы и выводы устройства, высоковольтных трансформаторов тока для обеспечения обратной связи по току и ограничителей напряжения на вводе устройства, соединенных в звезду, и вводе-выводе тиристорных высоковольтных блоков.
Каждый тиристорный высоковольтный блок содержит два силовых блока из трех (для исполнений на 6 кВ) и из пяти (для исполнений на 10 кВ) последовательно-соединенных высоковольтных тиристоров. Тиристоры выбраны с таким расчетом, что при выходе из строя одного тиристора в каждом из силовых блоков ("закоротка" во время работы). Устройство остается работоспособным, а оставшиеся в работе тиристоры в закрытом состоянии выдерживают рабочее напряжение.
Силовые блоки включены встречно-параллельно и каждый тиристор одного блока соединен с соседним другого блока, образуя реверсивные пары, состояние каждой из которых контролируются блоками контроля с высоковольтной оптронной развязкой. Информация об исправном состоянии тиристоров перед пуском разрешает начать процесс регулируемого пуска двигателя (сигнализация "Разрешение включения"). Для постоянного контроля состояния тиристоров может быть введён дополнительно блок высоковольтных резисторов, подключаемый к выводам тиристорных высоковольтных блоков.
ВТБ – высоковольтные тиристорные блоки
QSл – линейный разъединитель
QSш – шинный разъединитель
ОПН – ограничитель напряжений
ТТ – трансформатор тока
Высоковольтные R-C цепи подключаются к каждой реверсивной паре тиристоров для защиты последних от коммутационных перенапряжений.
Для выравнивания напряжений между последовательно соединенными парами тиристоров в закрытом состоянии предусмотрены делители напряжения на высоковольтных резисторах, включенных последовательно с входными цепями высоковольтных оптронных развязок, параллельно которым установлены защитные стабилитроны.
К зажимам "управляющий электрод-катод" силовых тиристоров подключены блоки ввода высоковольтных импульсных развязывающих трансформаторов, первичные обмотки которых для управления каждым силовым блоком соединены по схеме токовой петли. По этой схеме во всех блоках ввода одной токовой петли вырабатываются импульсы управления тиристорами одного силового блока для одновременного отпирания последних.
В устройствах плавного пуска УБПВД-ВЦ предусмотрены 4 регулируемые уставки начального токоограничения с равномерной шкалой от 1,0 до 4,0 Iном для обеспечения возможности запуска с помощью одного устройства нескольких двигателей разной мощности, а также регулируемые уставки времени разгона в пределах до 60 с, выбираемые дистанционно.
В устройствах плавного пуска предусмотрена связь по высокопроизводительному интерфейсу RS-485 для возможности дистанционного управления от АСУ ТП. Использование удобного пользовательского интерфейса обеспечивает максимально-улучшенные сервисно-эксплуатационные характеристики устройства.
Устройства плавного пуска УБПВД-ВЦ имеют следующие виды сигнализации:
•"Готовность" - готовность устройства к работе;
•"Окончание пуска" - завершение пуска;
•"Окончание разгона" - завершение разгона;
•"Разрешение включения" - исправность тиристоров главных цепей устройства перед пуском двигателя;
•"Отключение РВЗ разрешено" (РВЗ – разъединитель высоковольтный с заземлителем);
•"Отключение РВЗ запрещено".
Номинальное напряжение вспомогательных цепей устройства: трехфазное переменного тока (линейное) - 100 В, однофазное – 220 В.
Допустимые колебания: напряжения вспомогательных цепей от плюс 10% до минус 40% от номинального значения, частоты 2% от номинального значения.
Допустимые колебания напряжений силовых цепей 6 кВ и 10 кВ должны соответствовать ГОСТ 13109.
Электрическая прочность изоляции силовых цепей устройств плавного пуска соответствует ГОСТ 1516.1 и выдерживает испытательное напряжение переменного тока частотой 50 Гц 32 кВ (для устройств с номинальным напряжением главных цепей класса 6 кВ) и 42 кВ (для устройств с номинальным напряжением главных цепей класса 10 кВ), цепей управления, блокировки и сигнализации – 2 кВ.
[ http://www.korabel.ru/news/comments/ustroystva_plavnogo_puska_ubpvd-vts_ot_kompanii_vniir.html]Недопустимые, нерекомендуемые
Примечание(1)- По мнению автора карточкиТематики
EN
Англо-русский словарь нормативно-технической терминологии > semiconductor motor starter
111 soft start - soft stop unit
устройство плавного пуска
-
[Интент]Устройства УБПВД-ВЦ предназначены для плавного пуска высоковольтных асинхронных и синхронных электродвигателей механизмов с "вентиляторной" (квадратично зависимой от скорости) характеристикой нагрузочного момента (центробежные компрессоры, насосы, вентиляторы, дымососы, эксгаустеры и другие аналогичные механизмы).Функции
Устройства плавного пуска УБПВД-ВЦ обеспечивают:
- проверку исправности тиристоров перед началом пуска двигателя;
- плавное нарастание тока двигателя до величины начального токоограничения, обеспечивающего трогание двигателя с места;
- формирование заданного токоограничения по времени для обеспечения разгона электродвигателя;
- фиксацию окончания разгона и выдачу сигнала на включение высоковольтного выключателя, подключающего двигатель напрямую к сети по окончании разгона;
- контроль времени разгона двигателя и выдачу сигнала на прекращение пуска при превышении заданного времени разгона.
Устройства плавного пуска УБПВД-ВЦ обеспечивает следующие виды защит:
•максимально-токовую;
•время-токовую;
•от превышения заданного времени пуска двигателя;
•от обрыва фазы главных цепей и неполнофазного пуска;
•от неисправности тиристоров;
•от неисправности устройств формирования импульсов управления тиристорами.
Основные особенности конструкции и принцип работы устройств плавного пуска
Устройства, выполненные по принципу тиристорного регулятора напряжения, обеспечивают ограничение скорости нарастания и значения пускового тока электродвигателя изменением углов отпирания тиристоров через систему импульсно-фазового управления (СИФУ). В течение заданного времени пуска электродвигателя происходит плавное нарастание напряжения на обмотках статора от нуля до номинального значения.
Пусковой ток увеличивается плавно с заданным токоограничением, не создавая ударных электромагнитных моментов, отрицательно сказывающихся на электродвигателе и механизме.
Устройства плавного пуска УБПВД-ВЦ имеют цифровую систему управления, обеспечивающую удобное программирование настройки параметров.
В устройствах плавного пуска предусмотрена связь по высокопроизводительному интерфейсу RS-485 для возможности дистанционного управления от АСУ ТП. Использование удобного пользовательского интерфейса обеспечивает максимально-улучшенные сервисно-эксплуатационные характеристики устройств плавного пуска.
Силовая часть устройств состоит из трех тиристорных высоковольтных блоков, установленных на выкатных элементах в каждой фазе главных цепей устройства, высоковольтных разъединителей, позволяющих отключать вводы и выводы устройства, высоковольтных трансформаторов тока для обеспечения обратной связи по току и ограничителей напряжения на вводе устройства, соединенных в звезду, и вводе-выводе тиристорных высоковольтных блоков.
Каждый тиристорный высоковольтный блок содержит два силовых блока из трех (для исполнений на 6 кВ) и из пяти (для исполнений на 10 кВ) последовательно-соединенных высоковольтных тиристоров. Тиристоры выбраны с таким расчетом, что при выходе из строя одного тиристора в каждом из силовых блоков ("закоротка" во время работы). Устройство остается работоспособным, а оставшиеся в работе тиристоры в закрытом состоянии выдерживают рабочее напряжение.
Силовые блоки включены встречно-параллельно и каждый тиристор одного блока соединен с соседним другого блока, образуя реверсивные пары, состояние каждой из которых контролируются блоками контроля с высоковольтной оптронной развязкой. Информация об исправном состоянии тиристоров перед пуском разрешает начать процесс регулируемого пуска двигателя (сигнализация "Разрешение включения"). Для постоянного контроля состояния тиристоров может быть введён дополнительно блок высоковольтных резисторов, подключаемый к выводам тиристорных высоковольтных блоков.
ВТБ – высоковольтные тиристорные блоки
QSл – линейный разъединитель
QSш – шинный разъединитель
ОПН – ограничитель напряжений
ТТ – трансформатор тока
Высоковольтные R-C цепи подключаются к каждой реверсивной паре тиристоров для защиты последних от коммутационных перенапряжений.
Для выравнивания напряжений между последовательно соединенными парами тиристоров в закрытом состоянии предусмотрены делители напряжения на высоковольтных резисторах, включенных последовательно с входными цепями высоковольтных оптронных развязок, параллельно которым установлены защитные стабилитроны.
К зажимам "управляющий электрод-катод" силовых тиристоров подключены блоки ввода высоковольтных импульсных развязывающих трансформаторов, первичные обмотки которых для управления каждым силовым блоком соединены по схеме токовой петли. По этой схеме во всех блоках ввода одной токовой петли вырабатываются импульсы управления тиристорами одного силового блока для одновременного отпирания последних.
В устройствах плавного пуска УБПВД-ВЦ предусмотрены 4 регулируемые уставки начального токоограничения с равномерной шкалой от 1,0 до 4,0 Iном для обеспечения возможности запуска с помощью одного устройства нескольких двигателей разной мощности, а также регулируемые уставки времени разгона в пределах до 60 с, выбираемые дистанционно.
В устройствах плавного пуска предусмотрена связь по высокопроизводительному интерфейсу RS-485 для возможности дистанционного управления от АСУ ТП. Использование удобного пользовательского интерфейса обеспечивает максимально-улучшенные сервисно-эксплуатационные характеристики устройства.
Устройства плавного пуска УБПВД-ВЦ имеют следующие виды сигнализации:
•"Готовность" - готовность устройства к работе;
•"Окончание пуска" - завершение пуска;
•"Окончание разгона" - завершение разгона;
•"Разрешение включения" - исправность тиристоров главных цепей устройства перед пуском двигателя;
•"Отключение РВЗ разрешено" (РВЗ – разъединитель высоковольтный с заземлителем);
•"Отключение РВЗ запрещено".
Номинальное напряжение вспомогательных цепей устройства: трехфазное переменного тока (линейное) - 100 В, однофазное – 220 В.
Допустимые колебания: напряжения вспомогательных цепей от плюс 10% до минус 40% от номинального значения, частоты 2% от номинального значения.
Допустимые колебания напряжений силовых цепей 6 кВ и 10 кВ должны соответствовать ГОСТ 13109.
Электрическая прочность изоляции силовых цепей устройств плавного пуска соответствует ГОСТ 1516.1 и выдерживает испытательное напряжение переменного тока частотой 50 Гц 32 кВ (для устройств с номинальным напряжением главных цепей класса 6 кВ) и 42 кВ (для устройств с номинальным напряжением главных цепей класса 10 кВ), цепей управления, блокировки и сигнализации – 2 кВ.
[ http://www.korabel.ru/news/comments/ustroystva_plavnogo_puska_ubpvd-vts_ot_kompanii_vniir.html]Недопустимые, нерекомендуемые
Примечание(1)- По мнению автора карточкиТематики
EN
Англо-русский словарь нормативно-технической терминологии > soft start - soft stop unit
112 soft starter
устройство плавного пуска
-
[Интент]Устройства УБПВД-ВЦ предназначены для плавного пуска высоковольтных асинхронных и синхронных электродвигателей механизмов с "вентиляторной" (квадратично зависимой от скорости) характеристикой нагрузочного момента (центробежные компрессоры, насосы, вентиляторы, дымососы, эксгаустеры и другие аналогичные механизмы).Функции
Устройства плавного пуска УБПВД-ВЦ обеспечивают:
- проверку исправности тиристоров перед началом пуска двигателя;
- плавное нарастание тока двигателя до величины начального токоограничения, обеспечивающего трогание двигателя с места;
- формирование заданного токоограничения по времени для обеспечения разгона электродвигателя;
- фиксацию окончания разгона и выдачу сигнала на включение высоковольтного выключателя, подключающего двигатель напрямую к сети по окончании разгона;
- контроль времени разгона двигателя и выдачу сигнала на прекращение пуска при превышении заданного времени разгона.
Устройства плавного пуска УБПВД-ВЦ обеспечивает следующие виды защит:
•максимально-токовую;
•время-токовую;
•от превышения заданного времени пуска двигателя;
•от обрыва фазы главных цепей и неполнофазного пуска;
•от неисправности тиристоров;
•от неисправности устройств формирования импульсов управления тиристорами.
Основные особенности конструкции и принцип работы устройств плавного пуска
Устройства, выполненные по принципу тиристорного регулятора напряжения, обеспечивают ограничение скорости нарастания и значения пускового тока электродвигателя изменением углов отпирания тиристоров через систему импульсно-фазового управления (СИФУ). В течение заданного времени пуска электродвигателя происходит плавное нарастание напряжения на обмотках статора от нуля до номинального значения.
Пусковой ток увеличивается плавно с заданным токоограничением, не создавая ударных электромагнитных моментов, отрицательно сказывающихся на электродвигателе и механизме.
Устройства плавного пуска УБПВД-ВЦ имеют цифровую систему управления, обеспечивающую удобное программирование настройки параметров.
В устройствах плавного пуска предусмотрена связь по высокопроизводительному интерфейсу RS-485 для возможности дистанционного управления от АСУ ТП. Использование удобного пользовательского интерфейса обеспечивает максимально-улучшенные сервисно-эксплуатационные характеристики устройств плавного пуска.
Силовая часть устройств состоит из трех тиристорных высоковольтных блоков, установленных на выкатных элементах в каждой фазе главных цепей устройства, высоковольтных разъединителей, позволяющих отключать вводы и выводы устройства, высоковольтных трансформаторов тока для обеспечения обратной связи по току и ограничителей напряжения на вводе устройства, соединенных в звезду, и вводе-выводе тиристорных высоковольтных блоков.
Каждый тиристорный высоковольтный блок содержит два силовых блока из трех (для исполнений на 6 кВ) и из пяти (для исполнений на 10 кВ) последовательно-соединенных высоковольтных тиристоров. Тиристоры выбраны с таким расчетом, что при выходе из строя одного тиристора в каждом из силовых блоков ("закоротка" во время работы). Устройство остается работоспособным, а оставшиеся в работе тиристоры в закрытом состоянии выдерживают рабочее напряжение.
Силовые блоки включены встречно-параллельно и каждый тиристор одного блока соединен с соседним другого блока, образуя реверсивные пары, состояние каждой из которых контролируются блоками контроля с высоковольтной оптронной развязкой. Информация об исправном состоянии тиристоров перед пуском разрешает начать процесс регулируемого пуска двигателя (сигнализация "Разрешение включения"). Для постоянного контроля состояния тиристоров может быть введён дополнительно блок высоковольтных резисторов, подключаемый к выводам тиристорных высоковольтных блоков.
ВТБ – высоковольтные тиристорные блоки
QSл – линейный разъединитель
QSш – шинный разъединитель
ОПН – ограничитель напряжений
ТТ – трансформатор тока
Высоковольтные R-C цепи подключаются к каждой реверсивной паре тиристоров для защиты последних от коммутационных перенапряжений.
Для выравнивания напряжений между последовательно соединенными парами тиристоров в закрытом состоянии предусмотрены делители напряжения на высоковольтных резисторах, включенных последовательно с входными цепями высоковольтных оптронных развязок, параллельно которым установлены защитные стабилитроны.
К зажимам "управляющий электрод-катод" силовых тиристоров подключены блоки ввода высоковольтных импульсных развязывающих трансформаторов, первичные обмотки которых для управления каждым силовым блоком соединены по схеме токовой петли. По этой схеме во всех блоках ввода одной токовой петли вырабатываются импульсы управления тиристорами одного силового блока для одновременного отпирания последних.
В устройствах плавного пуска УБПВД-ВЦ предусмотрены 4 регулируемые уставки начального токоограничения с равномерной шкалой от 1,0 до 4,0 Iном для обеспечения возможности запуска с помощью одного устройства нескольких двигателей разной мощности, а также регулируемые уставки времени разгона в пределах до 60 с, выбираемые дистанционно.
В устройствах плавного пуска предусмотрена связь по высокопроизводительному интерфейсу RS-485 для возможности дистанционного управления от АСУ ТП. Использование удобного пользовательского интерфейса обеспечивает максимально-улучшенные сервисно-эксплуатационные характеристики устройства.
Устройства плавного пуска УБПВД-ВЦ имеют следующие виды сигнализации:
•"Готовность" - готовность устройства к работе;
•"Окончание пуска" - завершение пуска;
•"Окончание разгона" - завершение разгона;
•"Разрешение включения" - исправность тиристоров главных цепей устройства перед пуском двигателя;
•"Отключение РВЗ разрешено" (РВЗ – разъединитель высоковольтный с заземлителем);
•"Отключение РВЗ запрещено".
Номинальное напряжение вспомогательных цепей устройства: трехфазное переменного тока (линейное) - 100 В, однофазное – 220 В.
Допустимые колебания: напряжения вспомогательных цепей от плюс 10% до минус 40% от номинального значения, частоты 2% от номинального значения.
Допустимые колебания напряжений силовых цепей 6 кВ и 10 кВ должны соответствовать ГОСТ 13109.
Электрическая прочность изоляции силовых цепей устройств плавного пуска соответствует ГОСТ 1516.1 и выдерживает испытательное напряжение переменного тока частотой 50 Гц 32 кВ (для устройств с номинальным напряжением главных цепей класса 6 кВ) и 42 кВ (для устройств с номинальным напряжением главных цепей класса 10 кВ), цепей управления, блокировки и сигнализации – 2 кВ.
[ http://www.korabel.ru/news/comments/ustroystva_plavnogo_puska_ubpvd-vts_ot_kompanii_vniir.html]Недопустимые, нерекомендуемые
Примечание(1)- По мнению автора карточкиТематики
EN
Англо-русский словарь нормативно-технической терминологии > soft starter
113 automatic control engineer
Большой англо-русский и русско-английский словарь > automatic control engineer
114 de-skilling effect
Большой англо-русский и русско-английский словарь > de-skilling effect
115 programming center
Большой англо-русский и русско-английский словарь > programming center
116 system
ˈsɪstɪm сущ.
1) а) система Syn: method б) система, устройство;
метод adversary system ≈ система состязательности в суде (правда выясняется в ходе соревнования позиций и доказательств сторон в судебном процессе) health system ≈ органы здравоохранения narrative evaluation system ≈ описательная система оценок( письменная характеристика успеваемости учащегося, даваемая преподавателем в свободной форме) political system ≈ государственный строй air-conditioning system
2) какая-л. определенная система а) сеть( дорог и т. п.) б) мир;
вселенная( система планет)
3) организм или часть организма nervous system support-locomotion system
4) геол. система, формация система;
способ;
метод - a good * of teaching French хорошая система /-ий метод/ обучения французскому языку - the touch * of typewriting печатание на машинке по слепому методу (тк. в ед. ч.) система, систематичность - to work without * работать без( строгой) системы - his work lacks * (в) его работе недостает системы - to bring * out of confusion упорядочить неразбериху;
найти выход из запутанного положения строй, устройство - political * государственный строй - the feudal * феодальный строй - * of government система правления - bipartisan /two-party/ * (американизм) (политика) двухпартийная система классификация, система - * of axes (математика) система координат - * of units( физическое) система измерений - natural * (химическое) периодическая система элементов - the decimal * десятичная система - binary * (химическое) бинарная /двойная/ система (философское) система;
комплекс идей, образующих целое - a * of philosophy философская система;
философское учение( философское) вселенная, мир сеть (дорог, труб и т. п.) - tramway * трамвайная сеть - irrigation * система орошения - nervous * нервная система - circulatory * система кровообращения - telephone * телефонная сеть организм - to pass into the * проникнуть в организм - to introduce smth. into the * ввести что-л. в организм - strong drink is bad for the * крепкие напитки вредны для организма - to get smth. out of one's * вывести( яд и т. п.) из организма;
избавиться от какого-л. чувства, навязчивой идеи и т. п. - I must get her out of my * я должен выбросить ее из головы (астрономия) система - * of comets система комет - solar * солнечная система (геология) система, формация (спортивное) судейство - closed /written/ * закрытое судейство - open /public/ * открытое судейство (военное) средство - forward-based *s средства передового базирования - all *s go (космонавтика) все системы (корабля) работают нормально( компьютерное) система - multiprocession * многопроцессорная система - * manager системный программист;
администратор системы - * management сопровождение /координация работы/ системы accept ~ система акцептования accounting information ~ вчт. бухгалтерская информационная система accounting ~ система бухгалтерского учета accounting ~ система счетов adaptive ~ вчт. адаптивная система administrative ~ административная система alarm ~ система сигнализации analysis ~ система анализа application visualization ~ вчт. прикладная система изображения asset quality rating ~ система квалификации активов asymptotically stable ~ асимптотически устойчивая система automated control ~ асу, автоматизированная система управления axiomatic ~ аксиоматическая система backup ~ вчт. дублирующая система banking ~ банковская система belief ~ система доверия bicameral ~ двухпалатная система bicameral ~ парл. двухпалатная система bipartite ~ парл. двухпартийная система block ~ =blocking bonus ~ премиальная система buddy ~ метод близнецов bulk-service ~ система с групповым обслуживанием business ~ экономическая система cad ~ вчт. система автоматизированного проектирования call-reply ~ вчт. запрсно-ответная система certification ~ система сертификации closed queueing ~ замкнутая система массового обслуживания closed ~ замкнутая система code-dependent ~ вчт. система зависящая от данных code-independent ~ вчт. система не зависящая от данных code-insensitive ~ вчт. система не зависящая от данных code-sensitive ~ вчт. система зависящая от данных code-transparent ~ вчт. система не зависящая от данных coinage ~ монетная система column ~ система бухгалтерского учета по колонкам commission ~ система комиссионных вознаграждений computer ~ вычислительная система computer ~ вчт. вычислительная система computer ~ вычислительный комплекс computer ~ система вычислительных машин computer-aided control ~ автоматизированная система управления computer-to-plate ~ система создания печатных форм на компьютере computerized information ~ информационная система на базе ЭВМ concealment ~ система маскировки concession ~ система концессий constrained ~ вчт. система с ограничениями consulting ~ вчт. консультирующая система control ~ система управления control ~ вчт. система управления cooperative ~ система кооперации cooptation ~ система кооптации costing ~ система калькуляции себестоимости court ~ судебная система, система судопроизводства credit ~ кредитная система criminal reestablishment ~ система восстановления личности преступника crisis alert ~ система предупреждения о кризисе cross ~ вчт. кросс-система cyclical response ~ вчт. система циклических реакций data base management ~ вчт. система управления базой данных data handling ~ вчт. система обработки данных data processing ~ вчт. система обработки данных data ~ вчт. информационная система database ~ вчт. система баз данных decimal ~ десятичная система dedicated ~ специализированная система deductive ~ дедуктивная система delay ~ система с ожиданием desktop ~ система непосредственного взаимодействия direct debit ~ система прямого дебета direct ~ целевая система directional ~ система управления disk operating ~ вчт. дисковая операционная система, ДОС distributed file ~ вчт. распределенная файловая система distributed ~ вчт. распределенная система distribution ~ система распределения distributive ~ распределительная система DP ~ (data processing ~) система обработки данных dynamic ~ динамическая система educational ~ система образования educational ~ система обучения election ~ избирательная система electronic book-entry ~ вчт. электронная система бухгалтерского учета electronic full-page makeup ~ вчт. электронная система верстки полос enclave ~ анклавная группа;
полузащищенная группа (работающих под специальным наблюдением в обычных рабочих условиях инвалидов) equilibrium ~ равновесная система evolutionary ~ развиваемая система executive ~ вчт. операционная система expand a ~ вчт. расширять комплект оборудования системы expert ~ вчт. экспертная система explanatory ~ вчт. система объяснений fail-soft ~ вчт. система с амортизацией отказов federal ~ федеральная система fee ~ система вознаграждений feedback ~ система с обратной связью file ~ вчт. файловая система filing ~ система регистрации документов filing ~ система хранения документов financial ~ финансовая система fiscal ~ система финансов fixed price ~ система с фиксированной ценой flat-rate guarantee ~ система гарантий с фиксированной ставкой formal ~ формальная система fractional reserve ~ система частичных резервов frame ~ вчт. система фреймов functional information ~ вчт. функциональный информационная система giro ~ система жиросчетов governmental ~ правительственная система grading ~ система сортировки guarantee ~ система гарантий guidance ~ вчт. система -путеводитель hard disk ~ вчт. система с жестким диском help ~ вчт. справочник hire ~ =hire-purchase historical cost ~ выч. калькуляция на основе фактических издержек производства homogeneous ~ однородная система host ~ вчт. базисная система host ~ вчт. централизованная система imprest ~ система авансирования imputation ~ система условного начисления indexing ~ система индексации inductive ~ вчт. индуктивная система information ~ вчт. информационная система instruction ~ вчт. обучающая система integrated ~ вчт. интегрированная система intelligent ~ вчт. интеллектуальная система interactive ~ вчт. диалоговая система interactive ~ вчт. интерактивная система interest ~ система ставок процента international monetary ~ международная валютная система judicial ~ система судебных органов judicial ~ судебная система, система судебных органов judicial ~ судебная система jury ~ система суда присяжных knowledge base management ~ вчт. система управления базой знаний knowledge representation ~ вчт. система представления знаний land registration ~ система регистрации земельного участка learning ~ вчт. самообучаемая система licensing ~ система лицензирования linear programming ~ система линейного программирования linear ~ линейная система loadable ~ вчт. загружаемая система loan limit ~ система предельных размеров кредита loose-leaf ~ полигр. издание с отрывными или вкладными листами loss ~ система с потерями mail ~ вчт. электронная почта management information ~ (MIS) управленческая информационная система manual ~ система ручного управления many-server ~ вчт. многоканальная система mapped ~ вчт. система с управлением памятью market ~ рыночная система market ~ рыночная экономика market ~ страна с рыночной экономикой marketing information ~ система маркетинговой информации markov ~ марковская система markovian ~ марковская система master-slave ~ несимметричная система match ~ система выравнивания курсов militia ~ система милиции minimum price ~ система минимальных цен minimum wage ~ система минимальной заработной платы ministerial ~ правительственная система mixed price ~ смешанная ценовая система mixed ~ смешанная система modeless ~ вчт. система с однородным интерфейсом monetary ~ денежная система monetary ~ финансовая система monitoring ~ система мониторинга monitoring ~ система текущего контроля multi-user ~ вчт. многопользовательская система multiprocessing ~ вчт. многопроцессорная система multiprogramming ~ вчт. система, работающая в мультипрограммном режиме multiserver ~ вчт. многоканальная система multistation ~ вчт. многопунктовая система multitasking ~ вчт. многозадачная система multiuser ~ система коллективного пользования multivariable ~ вчт. многомерная система municipal ~ муниципальная система non-markovian ~ вчт. немарковская система nonstop ~ вчт. безостановочный компьютер normative ~ нормативная система number ~ система счисления numeration ~ система счисления off-line ~ вчт. автономная система on-demand ~ вчт. система без ожидания on-line ~ вчт. неавтономная система on-line ~ вчт. система, работающая в реальном масштабе времени on-line ~ вчт. система реального времени one-party ~ однопартийная система open learning ~ гибкая система обучения open ~ вчт. открытая система open-item ~ система с незакрытыми статьями баланса operating ~ действующая система operating ~ вчт. операционная система organized banking ~ организованная банковская система page ~ вчт. страничная система parliamentary ~ парламентская система partial cost ~ система калькуляции издержек производства с использованием нормативов party ~ партийная система patent ~ система патентования pay-as-you-go ~ система выплаты выходных пособий при увольнении payments ~ система платежей penal ~ пенитенциарная система periodic reordering ~ вчт. система с периодической подачей заказов pilot ~ вчт. прототип системы ~ система, устройство;
political system государственный строй portable ~ вчт. мобильная система preferential ~ система преференций premium ~ премиальная система price control ~ система регулирования цен price support ~ система гарантирования цен price ~ система цен priority ~ вчт. система приоритетов priority ~ вчт. система с приоритетами probabilistic ~ вероятностная система process cost ~ система исчисления производственных издержек production ~ продукционная система productions ~ система продукций program development ~ вчт. система разработки программ programming ~ вчт. система программирования progressive taxation ~ система прогрессивного налогообложения proportional taxation ~ система пропорционального налогообложения protection ~ вчт. система защиты prototyping ~ макет системы public health ~ система здравоохранения quality ~ система критериев качества quality ~ система проверки качества quata ~ система квот question-answering ~ вчт. вопросно-ответная система queueing ~ система массового обслуживания queueing ~ вчт. система массового обслуживания quota ~ система иммиграционных квот quota ~ система квот quota ~ система контингентов real time ~ вчт. система реального времени reasoning ~ вчт. разумная система redundant ~ вчт. избыточная система reliable ~ надежная система report ~ система отчетности reporting ~ система отчетности reporting ~ система сбора информации reporting ~ система учета representation ~ система представления reservation ~ система резервирования resident ~ вчт. резидентная система retrieval ~ док. система внесения исправлений retrieval ~ вчт. система поиска revision control ~ вчт. система управления версиями risk control ~ система контроля рисков salary adjustment ~ система регулирования заработной платы salary ~ система заработной платы scalable ~ вчт. расширяемая система school ~ школьная система segment ~ вчт. система с сегментной организацией self-assessment tax ~ система самообложения налогом self-contained ~ замкнутая система serving ~ вчт. система обслуживания setting up the ~ вчт. начальная установка системы short-term support ~ система краткосрочной поддержки simulation ~ имитационная система single-channel ~ вчт. одноканальная система single-server ~ вчт. одноканальная система slave ~ подчиненная система stable ~ устойчивая система standard pay ~ система нормативной заработной платы standby ~ резервная система static-priority ~ вчт. система со статическими приоритетами stationary ~ стационарная система stochastic ~ стохастическая система support ~ вчт. исполняющая система system метод ~ мир, вселенная ~ организм ~ сеть (дорог и т. п.) ~ геол. система, формация ~ система, устройство;
political system государственный строй ~ система, устройство ~ система, метод ~ система;
метод;
system of axes система координат;
what system do you go on? какому методу вы следуете? ~ comp. система ~ устройство ~ for medium-term financial assistance программа среднесрочной финансовой помощи ~ система;
метод;
system of axes система координат;
what system do you go on? какому методу вы следуете? ~ of commands система команд ~ of deductions система выводов ~ of financial contributions система финансовых взносов ~ of import control система контроля за импортом ~ of monitoring balance sheet growth система контроля за ростом статей баланса ~ of reimbursement система возмещения расходов ~ of remuneration система вознаграждения ~ of state государственное устройство ~ of taxation система налогообложения target ~ вчт. целевая система tax ~ налоговая система tax-at-source ~ система удержания налога из общей суммы доходов taxation ~ система налогообложения tender ~ система торгов terminal ~ вчт. система терминалов test ~ вчт. испытательная система text-retrieval ~ вчт. документальная информационная система thin-route ~ вчт. малоканальная система tightly-coupled ~ вчт. система с сильной связью time sharing ~ вчт. система разделения времени time-sharing ~ вчт. система разделения времени time-sharing ~ вчт. система с разделением времени timecard ~ система табельного учета totting-up ~ система зачетов trade support ~ система поддержки торговли trading ~ система торговли transaction-oriented ~ вчт. диалоговая система обработки запросов truck ~ система оплаты труда натурой truck ~ система оплаты труда товарами truck: truck = truck system ~ attr.: ~ system оплата труда товарами вместо денег;
Truck Acts ист. законы, ограничивающие систему оплаты труда товарами turnkey ~ вчт. готовая система two-channel ~ вчт. двухканальная система two-party ~ двухпартийная система unicameral ~ однопалатная система unitary tax ~ единая система налогообложения unmapped ~ вчт. система без управления памятью up ~ исправная система virgin ~ вчт. исходная система voluntary labelling ~ система добровольного снабжения продукта этикеткой wage ~ система оплаты труда waiting ~ вчт. система с ожиданием watch ~ бирж. система наблюдения weighting ~ система весов ~ система;
метод;
system of axes система координат;
what system do you go on? какому методу вы следуете? windowing ~ вчт. система управления окнами word processing ~ вчт. система обработки текстов work-space ~ вчт. система с рабочим состоянием117 automatic control engineer
Англо-русский словарь технических терминов > automatic control engineer
118 de-skilling effect
снижение требований к квалификации персонала (при внедрении АСУ технологическими процессами)Англо-русский словарь технических терминов > de-skilling effect
119 programming center
Англо-русский словарь технических терминов > programming center
120 automated
СтраницыСм. также в других словарях:
АСУ — аварийно спасательное устройство напр. на подводной лодке Словари: Словарь сокращений и аббревиатур армии и спецслужб. Сост. А. А. Щелоков. М.: ООО «Издательство АСТ», ЗАО «Издательский дом Гелеос», 2003. 318 с., С. Фадеев. Словарь сокращений… … Словарь сокращений и аббревиатур
АСУ-57 — БРОНЕВОЙ ЩИТ КРЫЛ … Энциклопедия техники
АСУ — По ГОСТ 24.003 84 Источник … Словарь-справочник терминов нормативно-технической документации
АСУ — см. Автоматизированная система управления. * * * АСУ АСУ, см. Автоматизированная система управления (см. АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ) … Энциклопедический словарь
АСУ НО — АСУНО автоматизированная система управления наружным освещением например: АСУ НО на трассе М 4 Липецк Воронеж (М4 федеральная автомобильная трасса, которая станет самой короткой дорогой от столицы России до столицы Олимпиады 2014 Сочи) АСУ НО… … Словарь сокращений и аббревиатур
АСУ ГП УЗ-Е — (Единая автоматизированная система управления грузовыми перевозками «Укрзализныци», АСК ВП УЗ Е) − система объединяющая АСОУП всех шести железных дорог Украины. Основной функцией является сбор и предоставление оперативной информации и суточной… … Википедия
АСУ ТП — Организационно техническая система управления объектом в целом в соответствии с принятым критерием (критериями) управления, в которой сбор и обработка необходимой информации осуществляется с применением средств вычислительной техники Источник: РД … Словарь-справочник терминов нормативно-технической документации
АСУ ЛР — автоматизированная система управления «Лесные ресурсы» Республика Коми Источник: http://ib.komisc.ru/t/ru/ir/vt/99 18/05.html АСУ ЛР автоматизированная система управления линейными районами ж. д. Источник: http://www.rzd.ru/agency/news… … Словарь сокращений и аббревиатур
АСУ — см. Автоматизированная система управления … Большой Энциклопедический словарь
АСУ — англ. system of management, automated; нем. Автономия Leitungssystem, automatisiertes. Совокупность экон. автоматических методов, техн. средств (ЭВМ, средства связи, устройства отображения информации и т. д.) и организационных комплексов,… … Энциклопедия социологии
АСУ — автоматизированная система управления Ряд технологий производства, позволяющих осуществлять управление работой оборудования и контроль за работой оборудования при помощи ЭВМ. [http://tourlib.net/books men/meskon glossary.htm] Тематики менеджмент… … Справочник технического переводчика
 18+© Академик, 2000-2024
18+© Академик, 2000-2024- Обратная связь: Техподдержка, Реклама на сайте
Экспорт словарей на сайты, сделанные на PHP, Joomla, Drupal, WordPress, MODx.
Перевод: с английского на русский
с русского на английский- С русского на:
- Английский
- С английского на:
- Все языки
- Казахский
- Мокшанский
- Русский
- Украинский