-
61 вид внутреннего разделения НКУ
вид внутреннего разделения НКУ
-
[ ГОСТ Р 51321. 1-2000 ( МЭК 60439-1-92)]
вид внутреннего изоляционного разгораживания
Классификация физического разделения внутри СНКУ.
[ ГОСТ Р МЭК 61439.2-2012]EN
form of internal separation
classification of physical separation within a PSC-assembly
[IEC 61439-2, ed. 1.0 (2009-01]FR
forme de séparation interne
Разделение НКУ перегородками или ограждениями (металлическими или неметаллическими) на отдельные отсеки или огражденные подсекции обеспечивает:
classification de séparation physique à l'intérieur d'un ensemble PSC
[IEC 61439-2, ed. 1.0 (2009-01]- защиту от прикосновения к токоведущим частями соседних функциональных блоков. Степень защиты должна быть не менее IP2X или IPXXB;
-
ограничение вероятности случайного возникновения дуги.
Примечания:
1 Отверстия между отсеками должны быть такими, чтобы газы, выделяемые защитным устройством от коротких замыканий, не нарушали нормальной работы функциональных блоков в соседних отсеках.
2 Последствия возникшей дуги могут быть значительно уменьшены с помощью устройств, ограничивающих величину и продолжительность тока короткого замыкания; - защиту от переноса твердых инородных частиц из одного блока НКУ в соседний. Степень защиты должна быть не менее IP2X.
1 — разделение отсутствует;
Разделение вида 1:
1 — сборные шины; 2 — блок вывода; 3 — распределительные шины; 4 — зажимы для внешних проводников; 5 — функциональные блоки; 6 — блок ввода
2а — разделение сборных шин и функциональных блоков. Зажимы для внешних проводников необязательно отгораживать от сборных шин;
 Разделение вида 2а:
Разделение вида 2а:
1 — сборные шины; 2 — блок вывода; 3 — распределительные шины; 4 — зажимы для внешних проводников; 5 — функциональные блоки; 6 — блок ввода
Рис. Legrand
2б — разделение сборных шин и функциональных блоков. Зажимы для внешних проводников отгорожены от сборных шин;

Разделение вида 2b:
1 — сборные шины; 2 — блок вывода; 3 — распределительные шины; 4 — зажимы для внешних проводников; 5 — функциональные блоки; 6 — блок ввода
Рис. Legrand
3а — разделение сборных шин и функциональных блоков, а также функциональных блоков друг от друга, за исключением их зажимов для внешних проводников. Зажимы для внешних проводников необязательно отгораживать от сборных шин;

Разделение вида 3а:
1 — сборные шины; 2 — блок вывода; 3 — распределительные шины; 4 — зажимы для внешних проводников; 5 — функциональные блоки; 6 — блок ввода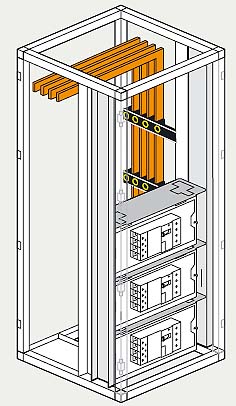
Рис. Legrand
3б — разделение сборных шин и функциональных блоков и разделение всех функциональных блоков друг от друга. Разделение зажимов для внешних проводников от функциональных блоков, но не друг от друга;

Разделение вида 3b:
1 — сборные шины; 2 — блок вывода; 3 — распределительные шины; 4 — зажимы для внешних проводников;
5 — функциональные блоки; 6 — блок ввода
4 — разделение сборных шин от функциональных блоков и всех функциональных блоков друг от друга, включая их выходные зажимы.
Разделение вида 4:
1 — сборные шины; 2 — блок вывода; 3 — распределительные шины; 4 — зажимы для внешних проводников;
5 — функциональные блоки; 6 — блок ввода
Виды разделения и наибольшие степени защиты, обеспечиваемые ими, подлежат согласованию между изготовителем и потребителем.
[ ГОСТ Р 51321. 1-2000 ( МЭК 60439-1-92)]Тематики
- НКУ (шкафы, пульты,...)
Синонимы
- вид внутреннего изоляционного разгораживания
- вид внутреннего разделения НКУ ограждениями или перегородками
- разделение НКУ на отсеки и огражденные подсекции
EN
- cubicle partitioning
- form
- form of internal separation
- form of separation
- functional unit partitioning
- partitioning form
- partitioning level
FR
Русско-французский словарь нормативно-технической терминологии > вид внутреннего разделения НКУ
62 программируемый логический контроллер
- speicherprogrammierbare Steuerung, f
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего. Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы. Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7. Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series. Рис. 4. Резервированный контроллер FCP270.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA). Рис. 5. Контроллер AC800M.
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-немецкий словарь нормативно-технической терминологии > программируемый логический контроллер
63 программируемый логический контроллер
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-английский словарь нормативно-технической терминологии > программируемый логический контроллер
64 программируемый логический контроллер
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-французский словарь нормативно-технической терминологии > программируемый логический контроллер
65 человеко-машинный интерфейс
- operator-machine communication
- MMI
- man-machine interface
- man-machine communication
- human-machine interface
- human-computer interface
- human interface device
- human interface
- HMI
- computer human interface
- CHI
человеко-машинный интерфейс (ЧМИ)
Технические средства, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование.
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства, дисплеи.
[ ГОСТ Р МЭК 60447-2000]
человекомашинный интерфейс (ЧМИ)
Технические средства контроля и управления, являющиеся частью оборудования, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование (ГОСТ Р МЭК 60447).
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства и дисплеи.
[ ГОСТ Р МЭК 60073-2000]
человеко-машинный интерфейс
Средства обеспечения двусторонней связи "оператор - технологическое оборудование" (АСУ ТП). Название класса средств, в который входят подклассы:
SCADA (Supervisory Control and Data Acquisition) - Операторское управление и сбор данных от технологического оборудования.
DCS (Distributed Control Systems) - Распределенная система управления технологическим оборудованием.
[ http://www.morepc.ru/dict/]Параллельные тексты EN-RU
MotorSys™ iPMCC solutions can integrate a dedicated human-machine interface (HMI) or communicate via a personal computer directly on the motor starters.
[Schneider Electric]Интеллектуальный центр распределения электроэнергии и управления электродвигателями MotorSys™ может иметь в своем составе специальный человеко-машинный интерфейс (ЧМИ). В качестве альтернативы используется обмен данным между персональным компьютером и пускателями.
[Перевод Интент]
HMI на базе операторских станций
Самое, пожалуй, главное в системе управления - это организация взаимодействия между человеком и программно-аппаратным комплексом. Обеспечение такого взаимодействия и есть задача человеко-машинного интерфейса (HMI, human machine interface).
На мой взгляд, в аббревиатуре “АСУ ТП” ключевым является слово “автоматизированная”, что подразумевает непосредственное участие человека в процессе реализации системой определенных задач. Очевидно, что чем лучше организован HMI, тем эффективнее человек сможет решать поставленные задачи.
Как же организован HMI в современных АСУ ТП?
Существует, как минимум, два подхода реализации функционала HMI:- На базе специализированных рабочих станций оператора, устанавливаемых в центральной диспетчерской;
- На базе панелей локального управления, устанавливаемых непосредственно в цеху по близости с контролируемым технологическим объектам.
Иногда эти два варианта комбинируют, чтобы достичь наибольшей гибкости управления. В данной статье речь пойдет о первом варианте организации операторского уровня.
Аппаратно рабочая станция оператора (OS, operator station) представляет собой ни что иное как персональный компьютер. Как правило, станция снабжается несколькими широкоэкранными мониторами, функциональной клавиатурой и необходимыми сетевыми адаптерами для подключения к сетям верхнего уровня (например, на базе Industrial Ethernet). Станция оператора несколько отличается от привычных для нас офисных компьютеров, прежде всего, своим исполнением и эксплуатационными характеристиками (а также ценой 4000 - 10 000 долларов).
На рисунке 1 изображена рабочая станция оператора системы SIMATIC PCS7 производства Siemens, обладающая следующими техническими характеристиками:
Процессор: Intel Pentium 4, 3.4 ГГц;
Память: DDR2 SDRAM до 4 ГБ;
Материнская плата: ChipSet Intel 945G;
Жесткий диск: SATA-RAID 1/2 x 120 ГБ;
Слоты: 4 x PCI, 2 x PCI E x 1, 1 x PCI E x 16;
Степень защиты: IP 31;
Температура при эксплуатации: 5 – 45 C;
Влажность: 5 – 95 % (без образования конденсата);
Операционная система: Windows XP Professional/2003 Server.
Рис. 1. Пример промышленной рабочей станции оператора.Системный блок может быть как настольного исполнения ( desktop), так и для монтажа в 19” стойку ( rack-mounted). Чаще применяется второй вариант: системный блок монтируется в запираемую стойку для лучшей защищенности и предотвращения несанкционированного доступа.
Какое программное обеспечение используется?
На станции оператора устанавливается программный пакет визуализации технологического процесса (часто называемый SCADA). Большинство пакетов визуализации работают под управлением операционных систем семейства Windows (Windows NT 4.0, Windows 2000/XP, Windows 2003 Server), что, на мой взгляд, является большим минусом.
Программное обеспечение визуализации призвано выполнять следующие задачи:- Отображение технологической информации в удобной для человека графической форме (как правило, в виде интерактивных мнемосхем) – Process Visualization;
- Отображение аварийных сигнализаций технологического процесса – Alarm Visualization;
- Архивирование технологических данных (сбор истории процесса) – Historical Archiving;
- Предоставление оператору возможности манипулировать (управлять) объектами управления – Operator Control.
- Контроль доступа и протоколирование действий оператора – Access Control and Operator’s Actions Archiving.
- Автоматизированное составление отчетов за произвольный интервал времени (посменные отчеты, еженедельные, ежемесячные и т.д.) – Automated Reporting.
Как правило, SCADA состоит из двух частей:
- Среды разработки, где инженер рисует и программирует технологические мнемосхемы;
- Среды исполнения, необходимой для выполнения сконфигурированных мнемосхем в режиме runtime. Фактически это режим повседневной эксплуатации.
Существует две схемы подключения операторских станций к системе управления, а точнее уровню управления. В рамках первой схемы каждая операторская станция подключается к контроллерам уровня управления напрямую или с помощью промежуточного коммутатора (см. рисунок 2). Подключенная таким образом операторская станция работает независимо от других станций сети, и поэтому часто называется одиночной (пусть Вас не смущает такое название, на самом деле таких станций в сети может быть несколько).

Рис. 2. Схема подключения одиночных операторских станций к уровню управления.Есть и другой вариант. Часто операторские станции подключают к серверу или резервированной паре серверов, а серверы в свою очередь подключаются к промышленным контроллерам. Таким образом, сервер, являясь неким буфером, постоянно считывает данные с контроллера и предоставляет их по запросу рабочим станциям. Станции, подключенные по такой схеме, часто называют клиентами (см. рисунок 3).
Как происходит информационный обмен?
Рис. 3. Клиент-серверная архитектура операторского уровня.
Для сопряжения операторской станции с промышленным контроллером на первой устанавливается специальное ПО, называемое драйвером ввода/вывода. Драйвер ввода/вывода поддерживает совместимый с контроллером коммуникационный протокол и позволяет прикладным программам считывать с контроллера параметры или наоборот записывать в него. Пакет визуализации обращается к драйверу ввода/вывода каждый раз, когда требуется обновление отображаемой информации или запись измененных оператором данных. Для взаимодействия пакета визуализации и драйвера ввода/вывода используется несколько протоколов, наиболее популярные из которых OPC (OLE for Process Control) и NetDDE (Network Dynamic Data Exchange). Обобщенно можно сказать, что OPC и NetDDE – это протоколы информационного обмена между различными приложениями, которые могут выполняться как на одном, так и на разных компьютерах. На рисунках 4 и 5 изображено, как взаимодействуют программные компоненты при различных схемах построения операторского уровня.
Рис. 4. Схема взаимодействия программных модулей при использовании одиночных станций.
Рис. 5. Схема взаимодействия программных модулей при использовании клиент-серверной архитектуры.
Как выглядит SCADA?
Разберем простой пример. На рисунке 6 приведена абстрактная схема технологического процесса, хотя полноценным процессом это назвать трудно. Рис. 6. Пример операторской мнемосхемы.
Рис. 6. Пример операторской мнемосхемы.
На рисунке 6 изображен очень упрощенный вариант операторской мнемосхемы для управления тех. процессом. Как видно, резервуар (емкость) наполняется водой. Задача системы - нагреть эту воду до определенной температуры. Для нагрева воды используется газовая горелка. Интенсивность горения регулируется клапаном подачи газа. Также должен быть насос для закачки воды в резервуар и клапан для спуска воды.
На мнемосхеме отображаются основные технологические параметры, такие как: температура воды; уровень воды в резервуаре; работа насосов; состояние клапанов и т.д. Эти данные обновляются на экране с заданной частотой. Если какой-либо параметр достигает аварийного значения, соответствующее поле начинает мигать, привлекая внимание оператора.
Сигналы ввода/вывода и исполнительные механизмы отображаются на мнемосхемах в виде интерактивных графических символов (иконок). Каждому типу сигналов и исполнительных механизмов присваивается свой символ: для дискретного сигнала это может быть переключатель, кнопка или лампочка; для аналогового – ползунок, диаграмма или текстовое поле; для двигателей и насосов – более сложные фейсплейты ( faceplates). Каждый символ, как правило, представляет собой отдельный ActiveX компонент. Вообще технология ActiveX широко используется в SCADA-пакетах, так как позволяет разработчику подгружать дополнительные символы, не входящие в стандартную библиотеку, а также разрабатывать свои собственные графические элементы, используя высокоуровневые языки программирования.
Допустим, оператор хочет включить насос. Для этого он щелкает по его иконке и вызывает панель управления ( faceplate). На этой панели он может выполнить определенные манипуляции: включить или выключить насос, подтвердить аварийную сигнализацию, перевести его в режим “техобслуживания” и т.д. (см. рисунок 7). Рис. 7. Пример фейсплейта для управления насосом.Оператор также может посмотреть график изменения интересующего его технологического параметра, например, за прошедшую неделю. Для этого ему надо вызвать тренд ( trend) и выбрать соответствующий параметр для отображения. Пример тренда реального времени показан на рисунке 8.
Рис. 7. Пример фейсплейта для управления насосом.Оператор также может посмотреть график изменения интересующего его технологического параметра, например, за прошедшую неделю. Для этого ему надо вызвать тренд ( trend) и выбрать соответствующий параметр для отображения. Пример тренда реального времени показан на рисунке 8.
 Рис. 8. Пример отображения двух параметров на тренде реального времени.
Рис. 8. Пример отображения двух параметров на тренде реального времени.
Для более детального обзора сообщений и аварийных сигнализаций оператор может воспользоваться специальной панелью ( alarm panel), пример которой изображен на рисунке 9. Это отсортированный список сигнализаций (alarms), представленный в удобной для восприятия форме. Оператор может подтвердить ту или иную аварийную сигнализацию, применить фильтр или просто ее скрыть. Рис. 9. Панель сообщений и аварийных сигнализаций.
Рис. 9. Панель сообщений и аварийных сигнализаций.
Говоря о SCADA, инженеры часто оперируют таким важным понятием как “тэг” ( tag). Тэг является по существу некой переменной программы визуализации и может быть использован как для локального хранения данных внутри программы, так и в качестве ссылки на внешний параметр процесса. Тэги могут быть разных типов, начиная от обычных числовых данных и кончая структурой с множеством полей. Например, один визуализируемый параметр ввода/вывода – это тэг, или функциональный блок PID-регулятора, выполняемый внутри контроллера, - это тоже тэг. Ниже представлена сильно упрощенная структура тэга, соответствующего простому PID-регулятору:
Tag Name = “MyPID”;
Tag Type = PID;
Fields (список параметров):
MyPID.OP
MyPID.SP
MyPID.PV
MyPID.PR
MyPID.TI
MyPID.DI
MyPID.Mode
MyPID.RemoteSP
MyPID.Alarms и т.д.
В комплексной прикладной программе может быть несколько тысяч тэгов. Производители SCADA-пакетов это знают и поэтому применяют политику лицензирования на основе количества используемых тэгов. Каждая купленная лицензия жестко ограничивает суммарное количество тэгов, которые можно использовать в программе. Очевидно, чем больше тегов поддерживает лицензия, тем дороже она стоит; так, например, лицензия на 60 000 тэгов может обойтись в 5000 тыс. долларов или даже дороже. В дополнение к этому многие производители SCADA формируют весьма существенную разницу в цене между “голой” средой исполнения и полноценной средой разработки; естественно, последняя с таким же количеством тэгов будет стоить заметно дороже.
Сегодня на рынке представлено большое количество различных SCADA-пакетов, наиболее популярные из которых представлены ниже:
1. Wonderware Intouch;
2. Simatic WinCC;
3. Iconics Genesis32;
4. Citect;
5. Adastra Trace Mode
Лидирующие позиции занимают Wonderware Intouch (производства Invensys) и Simatic WinCC (разработки Siemens) с суммарным количеством инсталляций более 80 тыс. в мире. Пакет визуализации технологического процесса может поставляться как в составе комплексной системы управления, так и в виде отдельного программного продукта. В последнем случае SCADA комплектуется набором драйверов ввода/вывода для коммуникации с контроллерами различных производителей. [ http://kazanets.narod.ru/HMI_PART1.htm]Тематики
- автоматизация, основные понятия
- автоматизированные системы
Синонимы
EN
Русско-английский словарь нормативно-технической терминологии > человеко-машинный интерфейс
66 Защита от короткого замыкания и прочность при коротком замыкании
7.5. Защита от короткого замыкания и прочность при коротком замыкании
Примечание. В настоящее время требования этого пункта применимы главным образом к устройствам переменного тока. Требования к устройствам постоянного тока находятся в стадии рассмотрения.
7.5.1. Общие положения
НКУ должны иметь конструкцию, способную выдерживать тепловые и электродинамические нагрузки, возникающие при значениях токов короткого замыкания, не превышающих установленных.
Примечание. Нагрузки, возникающие вследствие короткого замыкания, могут быть уменьшены при помощи токоограничивающих устройств (индуктивностей, токоограничивающих плавких предохранителей или других токоограничивающих коммутационных устройств).
НКУ должны быть защищены от токов короткого замыкания, например, автоматическими выключателями, плавкими предохранителями или тем и другим вместе, которые могут быть частью НКУ или располагаться за его пределами.
Примечание. Если НКУ предназначены для использования в системах IT*, то аппарат защиты в каждой фазе должен иметь достаточную отключающую способность относительно междуфазного напряжения при двухфазном замыкании на землю.
* См title="Электроустановки зданий. Часть 3. Основные характеристики".
Потребитель, заказывая НКУ, должен определить условия короткого замыкания на месте его установки.
Примечание. Желательно, чтобы в случае повреждения, ведущего к образованию дуги внутри НКУ, обеспечивалась максимально возможная степень защиты персонала, хотя главной целью является предупреждение образования такой дуги принятием соответствующих мер при проектировании или ограничение длительности горения дуги.
Для ЧИ НКУ рекомендуется использовать устройства, прошедшие типовые испытания, например, системы сборных шин, если на них не распространяются исключения пп. 8.2.3.1.1 - 8.2.3.1.3. В случаях, когда применение устройств, прошедших типовые испытания, не представляется возможным, прочность этих частей при коротком замыкании проверяют путем экстраполяции, исходя из устройств, испытанных в соответствии с типовыми испытаниями.
7.5.2. Сведения, касающиеся прочности при коротком замыкании
7.5.2.1. Для НКУ, в котором имеется только один блок ввода, изготовитель обязан представлять сведения о прочности при коротком замыкании следующим образом:
7.5.2.1.1. Для НКУ с устройством защиты от короткого замыкания, включенным в блок ввода, указанием максимально допустимого значения ожидаемого тока короткого замыкания на зажимах блока ввода. Эта величина не должна превышать номинальные значения (см. пп. 4.3 - 4.7). Коэффициент мощности и пиковые значения должны соответствовать указанным в п. 7.5.3.
Если устройством защиты от короткого замыкания является плавкий предохранитель, то изготовитель обязан указать характеристики плавкой вставки (номинальный ток, отключающую способность, ток отключения, I2t и т.д.).
Если используют автоматический выключатель с расцепителем, имеющим выдержку времени, то может потребоваться указание максимальной выдержки времени и значения тока уставки, соответствующих ожидаемому току короткого замыкания.
7.5.2.1.2. Для НКУ, в которых защитное устройство от короткого замыкания не входит в блок ввода, прочность при коротком замыкании указывают с помощью следующих способов (одного или нескольких):
а) номинальный кратковременно выдерживаемый ток (п. 4.3) и номинальный ударный ток (п. 4.4) вместе с соответствующим временем, если оно отличается от 1 с. Отношение пикового значения к действующему должно соответствовать указанному в табл. 5.
Примечание. Для периодов времени с максимальным значением до 3 с соотношение между кратковременно выдерживаемым током и соответствующим временем представляется формулой
i2t = const
при условии, что пиковое значение не превышает значение номинального ударного тока;
b) номинальный ожидаемый ток короткого замыкания на зажимах блока ввода НКУ, а также соответствующее время, если оно отличается от 1 с. Соотношение между пиковым и действующим значением должно быть таким, как указано в табл. 5;
с) номинальный условный ток короткого замыкания (п. 4.6);
d) номинальный ток короткого замыкания, отключаемый плавким предохранителем (п. 4.7).
Для подпунктов с) и d) изготовитель обязан указывать характеристики (номинальный ток, отключающая способность, ток отключения, I2t и т.д.) токоограничивающих коммутационных устройств (например, автоматических выключателей или плавких предохранителей), необходимых для защиты НКУ.
Примечание. При замене плавких вставок должны использоваться вставки с такими же характеристиками.
7.5.2.2. Для НКУ с несколькими блоками ввода, одновременная работа которых маловероятна, прочность при коротком замыкании может указываться для каждого из блоков в соответствии с п. 7.5.2.1.
7.5.2.3. Для НКУ с несколькими блоками ввода, которые могут работать одновременно, а также для НКУ с одним блоком ввода и одним или несколькими блоками вывода для вращающихся машин большой мощности, могущих повлиять на величину тока короткого замыкания, должно быть заключено специальное соглашение о величинах ожидаемого тока короткого замыкания в каждом блоке ввода или вывода и на шинах.
7.5.3. Зависимость между пиковыми и действующим и значениями тока короткого замыкания
Пиковое значение тока короткого замыкания (пиковое значение первой волны тока короткого замыкания, включая постоянную составляющую) для определения электродинамических усилий, получается умножением действующего значения тока короткого замыкания на коэффициент п. Стандартные значения коэффициента n и соответствующего коэффициента мощности даны в табл. 5.
Таблица 5
Действующее значение тока короткого замыкания
cos j
n
I £ 5 кА
0,7
1,5
5 кА < I £ 10 кА
0,5
1,7
10 кА < I £ 20 кА
0,3
2
20 кА < I £ 50 кА
0,25
2,1
50 кА < I
0,2
2,2
Примечание. Значения, приведенные в табл. 5, соответствуют большинству случаев применения. В специальных местах, например, вблизи трансформаторов или генераторов, коэффициент мощности может иметь более низкие значения; таким образом, максимальное пиковое значение ожидаемого тока станет предельным значением вместо действующего значения тока короткого замыкания.
7.5.4. Координация устройств защиты от короткого замыкания
7.5.4.1. Координация устройств защиты должна являться предметом согласования между потребителем и изготовителем. Вместо такого соглашения можно использовать сведения, приводимые в каталоге предприятия-изготовителя.
7.5.4.2. Если по условиям эксплуатации необходима непрерывность питания, то уставки или выбор устройств защиты от короткого замыкания внутри НКУ должны производиться таким образом, чтобы короткое замыкание, возникающее в любой отходящей цепи ответвления, могло быть устранено с помощью отключающего устройства, установленного в поврежденной цепи ответвления без какого-либо воздействия на другие отходящие ответвления, чем гарантируется селективность системы защиты.
7.5.5. Внутренние цепи НКУ
7.5.5.1. Главные цепи
7.5.5.1.1. Шины (оголенные или с изоляцией) должны располагаться таким образом, чтобы при нормальных условиях эксплуатации исключалась возможность внутреннего короткого замыкания. При отсутствии других указаний их выбирают согласно сведениям о прочности при коротком замыкании (п. 7.5.2) и должны выдерживать по крайней мере воздействия коротких замыканий, ограниченных устройствами защиты на стороне подачи питания на шины.
7.5.5.1.2. Проводники между главными шинами и стороной питания отдельного функционального блока, также как и комплектующие, входящие в этот блок, могут быть выбраны, исходя из уменьшенных воздействий короткого замыкания со стороны присоединения нагрузки к устройству защиты от короткого замыкания в этом блоке, при условии такого расположения этих проводников, при котором в нормальных рабочих условиях внутреннее короткое замыкание между фазами и/или между фазами и землей является маловероятным, например, если проводники имеют соответствующую изоляцию или оболочку. Это также относится к проводникам со стороны питания отдельных функциональных блоков внутри НКУ, не содержащих главных шин.
7.5.5.2. Вспомогательные цепи
Обычно вспомогательные цепи должны быть защищены от воздействия коротких замыканий. Однако защитное устройство, предохраняющее от короткого замыкания, не следует применять в случае, если его срабатывание может иметь опасные последствия. В этом случае проводники вспомогательных цепей должны располагаться таким образом, чтобы в нормальных условиях работы исключалась возможность возникновения короткого замыкания.
Источник: ГОСТ 28668-90 Э: Низковольтные комплектные устройства распределения и управления. Часть 1. Требования к устройствам, испытанным полностью или частично оригинал документа
Русско-английский словарь нормативно-технической терминологии > Защита от короткого замыкания и прочность при коротком замыкании
67 устройство
Einheit f; Gerät n; Anordnung f; Einrichtung f; Schaltungsanordnung f; System n; Anlage f; Station f; Struktur f; Ausrüstung f*68 устройство
device
(агрегат, приспособление)
- автоматического поиска записи программы (магнитофона) — automatic program locate device (apld)
- автоматическое навигационное — automatic navigation device the dr computer is a part of the automatic navigation device.
- автоматическое навигационное(ану) — dead reckoning computer, dr computer (dr cmptr)
входные параметры: путевая скорость, угол сноса и карты, ивс, скорость и направление ветра для определения места ла. — in its traditional form the dr computer uses the ground and airspeed data, drift angle, wind speed and direction.
- автономное (автоматическое) навигационное (ану) — dead-reckoning computer, dr computer
- автостабилизирующее (вертолета) — automatic stabilization installation
- алфавитно (-буквенно) цифровое печатающее (ацпу) — alpha-numerical printer
-, антенносогласующее (асу) — antenna coupler
- арифметическое (ау) — arithmetic unit
-, арретирующее (арретир) — caging device
-, блокирующее (блокировочное, для отключения и удержания в нерабочем положении оборудования при нарушении его нормальной работы) — lockout /locking-out/ device used to shut down ал@ hold an equipment out of service on occurrence of abnormal conditions.
-, блокирующее — interlock
устройство, включаемое срабатыванием другого устройства, находящимся с первым в прямой взаимосвязи, для управления данного или связанного с ним устройств, — а device actuated by operation of some other device with which it is directly associated, to govern succeeding operations of the same or allied devices.
-, бортовое погрузочное (бпу) — (airborne) cargo handling device
специальная каретка со стропами, перемещающаяся пo потолочным рельсам в грузовой кабине. — cargo handling device carriage moving along rails in cargo compartment.
- ввода (в уст-ве ввода и индикации) — insertion device
- ввода/вывода (увв, для эвм) — input/output device (in-out device)
transfer of data between the program and input/output devices.
- ввода и индикации (уви инерциальной навигационной системы) — control display unit (c/du, cdu)
- вентилятора (гтд), реверсивное — fan reverser
-, весоизмерительное — balance (for weighing)
-, взлетно-посадочное (шасси) — landing gear
-, визуальное сигнальное (аварийной сигнализации) — visual warning device
- внутрисамолетной связи для техобслуживания — ground service interphone system, ground crew interphone system
-, входное (двиг.) — engine air inlet section
it is directly attached to the front flange of the engine.
- выдержки времени (реле) — time delay relay
-, выключающее (эл.) — tripping device
механическое или электромагнитное ус-во для размыкания аэс. — а mechanical or electromagnetic device used for opening (turning off) a circuit breaker.
-, выпрямительное (ву) — rectifier (rect)
-, выпрямительное (трансформаторное) (ву) — transformer rectifier unit (tru)
-, выхлопное (двиг.) — exhaust unit
-, выходное (двиг. в реактивном сопле за турбиной) — exhaust unit
-, вычислительное (ву) — computer (cmptr)
-,вычислительное(системы ссос) — gpws computer
-,вычислительное,директорное — steering computer command input signals are provided to the steering computer.
-, вычислительное, канала крена (системы сау) — roll computer
-, вычислительное, канала курса (сау) — yaw computer
-, вычислительное, канала тангажа (сау) — pitch computer
- горизонтирования (гироплатформы) — (platform) levelling unit /device/
-, девиационное (магнит. компаса) (рис.80) — compass compensator
-, декодирующее (дешифратор) — decoder
устройство для декодирования кодовых сигналов. — a device for decoding а series of coded signals.
-, демпфирующее — damper
- для воспроизведения записи с магнитной ленты — tape reproducer
- для выдачи бумажных полотенец — paper towel dispenser
- для выдачи бумажных салфеток для лица (напр., для удаления косметики) — facial tissue dispenser
- для выдачи бумажных стаканчиков — paper cup dispenser
- для выдачи гигиенических пакетов — motion sickness bag dispenser
- для выдачи гигиенических салфеток — sanitary napkin dispenser
- для выдачи роликовой туалетной бумаги — toilet tissue roll paper dispenser
- для записи речи — voice recorder
устройство для записи переговоров членов экипажа. — that portion of the system used to record crew member conversation.
- для контейнерной загрузки (ла) — unit load device (uld)
- для определения отношения давлений (тяги) двигателя, вычислительное — engine pressure ratio computer used to determine engine rating for all modes of operation.
- для предотвращений возникновения земного резонанса (вертолета) — ground resonance prevention device
- для тарировки высотомера (см. устройство, тарировочное) — altimeter calibrator
- для тарировки указателя воздушной скорости (см. устройство, тарировочное) — airspeed calibrator
- для увеличения подъемной силы — high-lift device
- для форсирования тяги — thrust augmentor
- для хранения и выдачи полотенец (в туалете) — towel dispenser
- для хранения и выдачи салфеток — napkin dispenser
-, дозирующее — metering device
-, дозирующее (насоса-регулятора двигателя) — throttle valve
-, долговременное запоминающее (дзу) (постоянной информации) — permanent data storage unit (pdsu)
-, загрузочное (в системе управления ла) — load feel unit
-, задерживающее посадочное — arrester gear
-, запальное — igniter
устройство, непосредственно служащее для зажигания топлива (горючей смеси) в камере сгорания. — a device used to ignite fuel/air mixture in combustion chamber.
-, запоминающее — storage /unit/, memory
-, запоминающее ("блок памяти") — data storage unit (dsu) used to store information.
-, запоминающее (блок памяти параметров полета) — flight data storage unit (fdsu)
-, запоминающее ("память" доплеровского измерителя путевой скорости и сноса) — doppler memory (unit)
в случае отсутствия подачи сигналов, запоминающее устройство фиксирует последние замеры путевой скорости и сноса ла для выдачи их на индикацию. — under conditions of signal loss, the ground speed and drift indication last measured will continue to be displayed indefinitely.
-, запорно-редуцирующее — shut-off/pressure reducing valve
-, защитное (в агрегате, системе) — protection /protective/ device
-, защитное (снаряжение) — protective device
защитные очки, маски, резиновые перчатки. — use protective devices, such as goggles, face masks, and rubber gloves.
- защитное, катапультного кресла — ejection seat guard
- защиты (эл. сети) — circuit protection device
- защиты (эл. цепи) от повыщенного (или пониженного) напряжения — overvoltage (or undervoltage) protection device
- защиты (эл. цепи) от пониженной (или повышенной) частоты — underfrequency (or overfrequency) protection device
- защиты (эл.) сети, повторного включения — resettable circuit protective /protection/ device
устройство должно размыкать цепь независимо от положения органов управления (выключателей, переключателей) при перегрузке и неисправности данной цепи. — each resettable circuit protective device must be designed so that, when an overload or circuit fault exists, it will open the circuit regardless of the position of the operating control.
-, звуковое сигнальное (аварийной сигнализации) — audio warning device
-, имитирующие — simulator
устройство, имитирующее систему или явление. — а device which represents а system ог phenomenon.
- индикации выставки (навигационной системы) — align display unit (adu) panel set mode selector of the adu panel to trim lat, trim long, align nav.
- индикации и сигнализации углов атаки и перегрузок — angle-of-attack and acceleration indicating/warding system
-, инициирующее (вызывающее срабатывание пиромеханизмов) — initiator
- и работа (раздел ртэ) — construction and operation
-, кодирующее (шифратор) — coder
-, коммутационное — switching device, switch gear
электрическое или механическое устройство, служащее дпя включения и/или выключения цепи (системы), — any device or mechanism, either electrical or mechanical, which can place another device or circuit in an operating or nonoperating state.
-, коммутационное (соединительная или распределительная коробка) — junction box (jb)
-, коммутирующее (ук, плата для размещения радиоэлементов напр., диодов, резисторов и т.п.) — circuit board
- контроля — monitor
-, контрольно-записывающее (типа кз для регистрации высоты, скорости, перегрузки) — altitude, airspeed and acceleration recorder, height-velocity-g recorder (hvg rcdr)
-, коррекционное (гироскопического прибора) — erection mechanism
-, ламельное (для приведения штока рулевого агрегата автопилота при выключенных режимах) — switching (contact) device
-, лекальное (коррекционного механизма) — cam strip
-, множительное (ум) — multiplier
-, моделирующее — simulator
-, монтажное (амортизированная рама, платформа) — shockmount
-, наборное (частоты арм) — band selector switch
-, навигационно-вычислительное (нву, навигационный координатор) состав: пу, задатчики зпу и угла карты, планшет, задатчик ветра. — dead-reckoning navigation system (drns) system incorporates: control panel, dtk and chart angle selectors, roller map and wind selector.
-, навигационное вычислительнoe (доплеровского оборудования) (рис.82) — (doppler) navigation computer the doppler navigator provides outputs of velocity along and across heading to a navigation computer.
-, навигационное вычислительное, цифроаналоговое — navigation analog-digital computer
- навигационное, координаторное (типа ану, нву) — dead reckoning navigation system (drns)
- натяга (ножного) привязного ремня (на катапультном кресле) — (lap) strap /belt/ retractor
-, обеспечивающее плавучесть сухопутного самолета при аварийной посадке на воду. — flotation gear an emergency gear attached to а landplane to permit alighting on the water, and to provide buoyancy when resting on the surface of the water.
- обмена — exchange device
-, оперативное запоминающее (озу) (переменной информации) — random-access memory (ram), working (data) storage unit (wdsu)
- определения аэродинамических поправок (к показаниям указателя скорости, высотомеров) (уоап) — position error correction (determination) device
-, осветительное (лампа) — light
- пеленгаторное — direction finder
- первого каскада компрессоpa, входное — lp compressor air inlet section
-, переходное (переходник) — adapter
-, переходное (наружной подвески - для крепления к пилону) — store adapter shoe
-, переходное (соединяющее двигатель с удлинительной трубой или трубу с соплом) — transition section
-, погрузочно-разгрузочное — cargo handling device
-, подпорное (в гидравлической системе) — intensifier
- полупроводниковое.-, постоянное запоминяющее (пзу) — semiconductor device read-only memory (rom), permanent storage unit
computer storage device which retains the stored data indefinitely.
-, постоянное запоминающее (внешнее) — permanent storage (unit)
- предотвращающее перекладку рычага управления шасси в убранное положение на земле — landing gear control lever antiretraction device
-, предохранительное — safety device
-, предохранительное (напр., колпачок на выключателе) — guard check switch guard down and safetied.
- предупредительной тряски штурвала при приближении к критическому углу атаки — stick shaker turn off stall warn switch if alpha off light is illuminated to prevent stick shaker action resulting from a false stall warning due to alpha probe icing.
-, преобразующее (в системе мсрп) — converter
- приемопеленгаторное — direction-finder receiver
-, приемопеленгаторное (арк) — direction finder
-, программное (временное) — timer
-, противообледенительное — anti-icer, de-icer
-, противообледенительное воздушно-тепловое — hot air anti-icer
-, противоюзовое — anti-skid device
-, пусковое (pc или cc) — missile launcher
-, пылезащитное (пзу, на воздухозаборник двигателя вертолета) — dust protection device (dust prot)
-, развязывающее (эл.) — decoupler
-, раздаточное (см. устройство для выдачи) — dispenser
-, распределительное — distributor
-, распределительное (эл. сети) — distribution panel (р)
-, распределительное (распределительная коробка зл. сети) — junction box (jb)
-, распределительное (панель азс) (напр. ру25) — circuit breaker panel, св panel, (св pnl, р) (р25)
- распределительное (эл. шина) — bus
-, распределительное (положение переключателя ру (шин), напр. ру1,ру2 и т.д.) — bus (1, 2) the bus selector switch is set in bus 1 position.
-, распределительное (ру, распределительная шина) (рис.91) — distribution bus
шина, запитываемая от питательной магистрали для дальнейшего распределения электропитания по фидерам и цепям. — а conductor connected to the (supply) mains from which electric power is taken to circuits and/or feeders.
-, распределительное переменного тока (панель азс) — ac power circuit breaker panel
-, распределительное постоянного тока (панель азс) — dc power circuit breaker panel
-, распределительное хвостового (хру) (панель азс) — tail circuit breaker panel
-, распределительное центральное (цру, панель азс) — main circuit breaker panel, main св panel
-, распределительное центральное (цру, коробка) — main junction box (mjb)
-, распределительное, центральное (цру, шина) — main distribution bus
-, реверсивное (двигателя) — thrust reverser
устройство для изменения направления тяги двигателя на обратно (рис.53). — a device for redirecting the engine exhaust to an opposite direction.
-, реверсивное, включено — thrust reverser deployed (reverser dplyd, rvsr dpld)
при включенном ру продолжать полет на пониженной скорости. — if reverser is deployed, continue (flying) at reduced speed.
-, реверсивное выключено — thrust reverser stowed (reverser stwd, rvsr stwd)
при невозможности выключения ру необходимо как можно скорее совершить посадку. — if reverser cannot be stowed, land as soon as practical.
-, реверсивно-тормозное (рту) комбинация створок реверса тяги и тормозных щитков. — thrust/air brakes
- реверсирования тяги, основное — primary thrust reverser
- регистрации, бортовое — (flight data) recorder
- регистрации звуковой информации в кабине экипажа — cockpit voice recorder (cvr)
- регистрации высоты прибop для записи (изменений) высоты по времени полета. — altitude /height/ recorder an instrument by which variation in height is recorded against time.
-, регулировочное — adjusting device, adjuster
-, рулежно-демпфирующее (передней опоры шасси) — nosewheel steering/damping control valve (and follow-up assembly)
- самоконтроля (встроенное) — (built-in, integral) self-test feature
-, самолетное громкоговорящее (сгу) — passenger /public/ address system (pa)
сгу предназначено для оповещения пассажиров через громкоговорители. — used to make voice announcements to the passengers over cabin loud speakers.
-, самолетное переговорное (спу) — interphone system int, intph, intercommunication system (ics, intcom)
оборудование, обеспечивающее связь между членами экипажа внутри самолета и с техническим персоналом на земле. — that portion of the system which is used by flight and ground personnel to communicate between areas on the aircraft.
-, самолетное переговорное вспомогательное для связи с бортпроводниками и наземным обслуживающим персоналом. — service interphone system
- самолетное переговорное громкоговорящее (спгу = сгу + спу) — interphone /intercom/ and passenger /public/ address system (int/pa)
для связи между членами экипажа и обращения к пассажирам через громкоговорители. — used by the crew members to communicate, and to address the passengers over cabin loud speakers.
- сброса (показаний прибора) — (instrument reading) reset knob
-, светотехническое (арматура) — light
- связи (в ацбс) — coupler, coupling device
-, сигнальное (для подачи сигнала бедствия в случае аварийной посадки) — long-range signaling device
- смотровое, оптическое — optical viewer
наблюдение за механическим указателем положения шасси осуществляется посредством смотрового оптического устройства. — the nose gear (mechanical) indicators can be seen through an optical viewer in aft bulkhead.
-, согласующее (системы регистрации параметров полета) — signal conditioning unit
-, сопрягающее/сопряжения / (блоков, систем) — interface
-, сравнивающее (блок сравнения данных) — comparator
ус-тва и цепь для сравнения информации, поступающей из двух источников. — a device (in computer operations) or circuit for comparing information from two sources.
-, стопорное (арретирующее) — caging device
-, стопорное (фиксатор) — lock, latch
- счисления пути, вычислительное — dead-reckoning computer dr computer outputs are latitude and longitude.
-, тарировочное (калибратор) — calibrator
- тарировочное (высотомера) — altimeter calibrator
устройство для определения инструментальной погрешности высотомера. — an apparatus for measuring the instrument errors of an altimeter.
-, тарировочное (указателя воздушной скорости) — airspeed calibrator an apparatus for measuring the instrument errors of an airspeed indicator.
-, термокомпенсационное (напр., трубопровода) — thermal compensator
-, тормозное (тормоз) — brake
-, тормозное (специальное) к спец. тормозным устройствам относятся: устройства реверсирования тяги, возд. тормоза, спойлеры, реверсивные возд. винты. — deceleration device special deceleration (or retardation) devices include thrust reversers, air brakes, spoilers, ground fine and reverse pitch propellers.
-, трансформаторно-выпрямительное (ву) — transformer-rectifier unit (tr, t/r, tru, xfmr-rect)
- управляющее вычислительное (системы автоматического управления ла) — steering computer
- усилительно-выпрямительное (уву) — transformer rectifier unit (tru)
-, форсажное (форсажная камера) — afterburner
-, форсажное (пд) — augmentor
выхлопная система пд включает форсажное устройство. — exhaust system for reciproсating engines includes augmentors.
-, фронтовое, двигателя (между двигателем и удлинительной трубой) — jet pipe transition section
-, фронтовое, реактивного сопла (между удлинительной трубой и pc) — jet /propelling/ nozzle transition section
-, центральное распределительное (панель) — main distribution panel
-, центральное, распределительное (цру, коробка эл. сети) — main junction box (mjb)
-, центральное распределительное (цру, шина) — main distribution bus
шина между источником питания и распределительными шинами (рис.91). — a conductor connected between а generating source and distribution busses.
-, центральное, распределительное (центральный распределительный энергоузел) — main distribution center wires extending from а generator bus to the main distribution center.
-, цифровое вычислительное — digital computer
вычислительное ус-во обрабатывающее и выдающее информацию в цифровой форме. — a computer which operates with information represented in а digital form.
- часового типа (таймер) — timer, clockwork timing device
-, электромагнитное стопорное (рулевого агрегата автопилота) — solenoid brake
-, электромеханическое — electromechanical device
гироскоп является точным электромеханическим устройством. — a gyroscope is а delicate electromechanical device.
выполнять свою функцию (о защитном у.) — serve its purpose
срабатывать (о защитном у.) — operate, become actuated, come into actionРусско-английский сборник авиационно-технических терминов > устройство
69 оператор
оператор м. выч. Anweisung f; Bedienender m; Bediener m; Bedienungskraft f; Bedienungsmann m; Bedienungsperson f; Führer m; Lenker m; Maschinenführer m; Operateur m; выч.,мат. Operator mоператор м. "И" лог. UND-Operator mоператор м. присваивания выч. Ergibtanweisung f; выч. Zuweisungsanweisung f; выч. Zuweisungsoperator m70 ввод - вывод
Русско-английский словарь по информационным технологиям > ввод - вывод
71 ввод - вывод
Бизнес, юриспруденция. Русско-английский словарь > ввод - вывод
72 сетевой адаптер
сетевая карта
сетевой адаптер
сетевой интерфейс
Компонент компьютера для подключения к вычислительной сети.
[ http://www.morepc.ru/dict/]
сетевой адаптер
Периферийное устройство (плата), обеспечивающее соединение компьютера и ЛВС.
[ http://www.lexikon.ru/dict/net/index.html]
Сетевой адаптер (NIC: Network Interface Card) -
устройство, выполняющее функции сопряжения ЭВМ с каналами связи; они реализуют ввод-вывод данных с оконечного оборудования в сеть.
Сетевые адаптеры (другие названия - сетевые карты, интерфейсные карты, сетевые платы) имеют передающую и принимающую части, которые в случае поддержки полного дуплекса должны быть независимы друг от друга.
Функции сетевых адаптеров
Функции передающей части:- принять от центрального процессора блок данных и адрес назначения;
- сформировать кадр (добавить свой адрес в поле адреса источника, CRC-код и пр.);
- получить доступ к среде передачи;
- передать кадр;
- в случае обнаружения коллизии повторить передачу;
- сообщить процессору об успехе или невозможности передачи.
Функции приемной части:
- просмотр заголовков всех кадров, проходящих в линии;
- извлечение из линии кадров, адресованных данному узлу;
- помещение кадра в собственный буфер памяти;
- проверка кадра на отсутствие ошибок (проверка по длине кадра, по CRC);
- уведомление центрального процессора о приеме кадра;
- передача кадра из локального буфера адаптера в системную память.
Архитектура сетевых адаптеров
Обязательные узлы адаптеров:- физический интерфейс подключения к среде передачи и схемы организации доступа к среде передачи;
- буферная память для передаваемых и принимаемых кадров;
- схема прерываний для уведомления центрального процессора об асинхронных событиях (таких, как завершение передачи, прием кадра);
- средства доставки кадра между буфером кадров и системной памятью;
- устройство управления, реализующее логику работы адаптера.
Дополнительные узлы адаптеров:
-
микросхема ПЗУ удаленной загрузки:
на плате адаптера может располагаться микросхема постоянного запоминающего устройства (так же называемая Boot ROM) для создания т.н. бездисковых рабочих станций. Это компьютеры, в которых нет ни винчестера, ни флоппи-дисководов. Загрузка операционной системы выполняется из сети, и выполняет ее программа, записанная в микросхеме дистанционной загрузки; - средства "пробуждения" по сети;
- собственный процессор.
Факторы, влияющие на скорость обмена данными
Скорость обмена данными по сети зависит от нескольких факторов:- от скорости передачи данных между локальной памятью адаптера и системной памятью;
- от возможности параллельного выполнения нескольких операций;
Скорость передачи данных между локальной памятью адаптера и системной памятью, в свою очередь, зависит от средств "доставки". Существуют различные средства "доставки" данных между локальным буфером и системной памятью:
- каналы прямого доступа к памяти (DMA) - это довольно медленная транспортировка данных;
- программный ввод/вывод (PIO) - данное средство действует более быстро, но полностью загружает центральный процессор на время передачи;
- прямое управление шиной - это средство наиболее эффективно при наличии собственного процессора (не загружается центральный процессор, что особенно важно для серверов).
Классификация адаптеров
Адаптеры можно подразделить на адаптеры для рабочих станций и адаптеры для серверов.
Адаптеры для рабочих станций проще и дешевле, скорость - до 100 Мбит/с, полный дуплекс используется редко. Распространены двухскоростные адаптеры: 10/100 Мбит/с. Часто имеют функцию "пробуждения по сети" (remote wake up).
Адаптеры для серверов наделяются интеллектом для прямого управления шиной и параллельной работы узлов адаптера. Выполняют некоторые задачи управления трафиком. Типовая скорость - 100 Мбит/с.
Разъемы адаптеров
Адаптеры могут иметь по нескольку (обычно не более 2) разъемов:- BNC - байонетный разъем для коаксиального кабеля;
- AUI - розетка для подключения внешнего адаптера (трансивера);
- RJ-45 - восьмиконтактное гнездо для подключения кабеля "витая пара";
- SC - оптический разъем для подключения оптоволоконного кабеля.
При наличии нескольких разъемов одновременно они использоваться не могут.
Многопортовые серверные карты имеют несколько независимых адаптеров, каждый - со своим интерфейсом.
BNC-разъем предназначен для подключения Т-коннектора (тройниковый соединитель). Т-коннектор с одной стороны подключается к сетевому адаптеру, а с двух других сторон к нему подключаются отрезки тонкого коаксиального кабеля с соответствующими разъемами на концах.
На открытых концах сети помещаются специальные заглушки - терминаторы, которые подключаются к свободным конца Т-коннекторов (коаксиальные разъемы, в корпусе которых установлен резистор с сопротивлением 50 Ом). Корпус одного из терминаторов должен быть заземлен. В каждом сегменте сети можно соединять только один терминатор.
AUI-розетка предназначена для подключения трансиверного кабеля. Этот многожильный экранированный кабель соединяет рабочую станцию с устройством, называемым трансивером. Трансивер служит для подключения рабочей станции к толстому коаксиальном кабелю. На корпусе трансивера имеется 3 разъема: два - для подключения толстого коаксиального кабеля и один - для подключения трансиверного кабеля.
Между собой трансиверы соединяются отрезками толстого коаксиального кабеля с припаянными к их концам коаксиальными разъемами.
Системные ресурсы
Сетевые карты потребляют следующие системные ресурсы компьютера:-
Пространство ввода-вывода -
используется для обращения к регистрам адаптера при инициализации, текущем управлении, опросе состояния, передаче данных. -
Запрос прерывания -
это одна линия (IRQ 3, 5, 7, 9, 10, 11, 12 или 15), активизируемая по приему кадра, адресованного данному узлу, а также по окончании передачи кадра. Прерывания - самый дефицитный ресурс ПК, из-за него часто возникают конфликты. Без прерываний сетевые карты работать не могут, при некорректном назначении обращения к сети - "зависают". Используемый номер прерывания должен быть с помощью CMOS Setup компьютера закреплен за шиной, на которой установлен адаптер. -
Канал прямого доступа к памяти (DMA) -
используется в некоторых старых картах ISA/EISA. -
Разделяемая память адаптера (adapter RAM) -
буфер для передаваемых и принимаемых кадров. Для карт ISA обычно приписывается к области верхней памяти (UMA). Карты PCI могут располагаться в любом месте адресного пространства, не занятого оперативной памятью компьютера. Разделяемую память используют не все модели карт. -
Постоянная память адаптера (adapter ROM) -
область адресов для модулей расширения ROM BIOS. Используется для установки ПЗУ удаленной загрузки и антивирусной защиты.
Конфигурирование
Конфигурирование адаптера - настройка на использование системных ресурсов компьютера и выбор среды передачи. Способы конфигурирования зависят от модели карты:- с помощью переключателей (джамперов), установленных на карте. Используется на адаптерах первых поколений шины ISA;
- Если сетевой адаптер не поддерживает стандарт Plug&Play, то, перед тем как вставить сетевой адаптер в материнскую плату компьютера, необходимо с помощью переключателей, расположенных на плате адаптера задать правильные значения для портов ввода/вывода, канала прерывания, базовый адрес ПЗУ дистанционной загрузки бездисковой станции.
- с помощью специальных утилит - для карт на шинах ISA, EISA, MCA;
- автоматическое конфигурирование - P&P для шин ISA и PCI. Распределение ресурсов осуществляется на этапе загрузки ОС.
[ http://sharovt.narod.ru/l09.htm]
Тематики
Синонимы
EN
Русско-английский словарь нормативно-технической терминологии > сетевой адаптер
73 вводной аппарат
вводной аппарат
Аппарат через который осуществляется ввод проводников питающей цепи в комплектное устройство.
[Интент]
аппарат ввода
Аппарат, через который подают электрическую энергию в НКУ.
Примечание.
Определение составлено по аналогии с определением " блок ввода"
[Интент]
См. также вводной выключатель
В учетно-распределительно-групповых щитках вводные аппараты относятся к вводам квартир.
[ ГОСТ Р 51628-2000]
В щитках без отключающего аппарата на вводе должны быть зажимы для присоединения проводников питающей цепи
[ ГОСТ Р 51778-2001]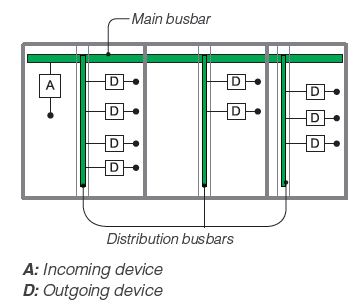
Рис. Schneider Electric:Main busbar - Сборная шина
Distribution busbars - Распределительные шины
A: Incoming device - А: Аппарат ввода
D: Outgoing device - D: Аппарат вывода

Рис. Schneider ElectricIncomer
Compact NSX250 4P
Fixed, front connection
Toggle
Incoming cables via bottom to incoming connection block
[Schneider Electric]
Вводной аппарат
Compact NSX250, 4-полюсный
Стационарный с передним присоединением проводоников
Рычажная рукоятка управления автоматического выключателя
Ввод проводников к присоединительному блоку снизу
[Перевод Интент]Тематики
- НКУ (шкафы, пульты,...)
- аппарат, изделие, устройство...
Синонимы
EN
Русско-английский словарь нормативно-технической терминологии > вводной аппарат
74 технология коммутации
технология коммутации
-
[Интент]Современные технологии коммутации
[ http://www.xnets.ru/plugins/content/content.php?content.84]Статья подготовлена на основании материалов опубликованных в журналах "LAN", "Сети и системы связи", в книге В.Олифер и Н.Олифер "Новые технологии и оборудование IP-сетей", на сайтах www.citforum.ru и опубликована в журнале "Компьютерные решения" NN4-6 за 2000 год.
- Введение
- Коммутация первого уровня.
- Коммутация второго уровня.
- Коммутация третьего уровня.
- Коммутация четвертого уровня.
- Критерии выбора оборудования, физическая и логическая структура сети
- Качество обслуживания (QoS) и принципы задания приоритетов
- Заключение
Введение
На сегодня практически все организации, имеющие локальные сети, остановили свой выбор на сетях типа Ethernet. Данный выбор оправдан тем, что начало внедрения такой сети сопряжено с низкой стоимостью и простотой реализации, а развитие - с хорошей масштабируемостью и экономичностью.
Бросив взгляд назад - увидим, что развитие активного оборудования сетей шло в соответствии с требованиями к полосе пропускания и надежности. Требования, предъявляемые к большей надежности, привели к отказу от применения в качестве среды передачи коаксиального кабеля и перевода сетей на витую пару. В результате такого перехода отказ работы соединения между одной из рабочих станций и концентратором перестал сказываться на работе других рабочих станций сети. Но увеличения производительности данный переход не принес, так как концентраторы используют разделяемую (на всех пользователей в сегменте) полосу пропускания. По сути, изменилась только физическая топология сети - с общей шины на звезду, а логическая топология по-прежнему осталась - общей шиной.
Дальнейшее развитие сетей шло по нескольким путям:- увеличение скорости,
- внедрение сегментирования на основе коммутации,
- объединение сетей при помощи маршрутизации.
Увеличение скорости при прежней логической топологии - общая шина, привело к незначительному росту производительности в случае большого числа портов.
Большую эффективность в работе сети принесло сегментирование сетей с использованием технология коммутации пакетов. Коммутация наиболее действенна в следующих вариантах:
Вариант 1, именуемый связью "многие со многими" – это одноранговые сети, когда одновременно существуют потоки данных между парами рабочих станций. При этом предпочтительнее иметь коммутатор, у которого все порты имеют одинаковую скорость, (см. Рисунок 1).
Вариант 2, именуемый связью "один со многими" – это сети клиент-сервер, когда все рабочие станции работают с файлами или базой данных сервера. В данном случае предпочтительнее иметь коммутатор, у которого порты для подключения рабочих станций имеют одинаковую небольшую скорость, а порт, к которому подключается сервер, имеет большую скорость,(см. Рисунок 2).

Когда компании начали связывать разрозненные системы друг с другом, маршрутизация обеспечивала максимально возможную целостность и надежность передачи трафика из одной сети в другую. Но с ростом размера и сложности сети, а также в связи со все более широким применением коммутаторов в локальных сетях, базовые маршрутизаторы (зачастую они получали все данные, посылаемые коммутаторами) стали с трудом справляться со своими задачами.
Проблемы с трафиком, связанные с маршрутизацией, проявляются наиболее остро в средних и крупных компаниях, а также в деятельности операторов Internet, так как они вынуждены иметь дело с большими объемами IP-трафика, причем этот трафик должен передаваться своевременно и эффективно.
С подключением настольных систем непосредственно к коммутаторам на 10/100 Мбит/с между ними и магистралью оказывается все меньше промежуточных устройств. Чем выше скорость подключения настольных систем, тем более скоростной должна быть магистраль. Кроме того, на каждом уровне устройства должны справляться с приходящим трафиком, иначе возникновения заторов не избежать.
Рассмотрению технологий коммутации и посвящена данная статья.Коммутация первого уровня
Термин "коммутация первого уровня" в современной технической литературе практически не описывается. Для начала дадим определение, с какими характеристиками имеет дело физический или первый уровень модели OSI:
физический уровень определяет электротехнические, механические, процедурные и функциональные характеристики активации, поддержания и дезактивации физического канала между конечными системами. Спецификации физического уровня определяют такие характеристики, как уровни напряжений, синхронизацию изменения напряжений, скорость передачи физической информации, максимальные расстояния передачи информации, физические соединители и другие аналогичные характеристики.
Смысл коммутации на первом уровне модели OSI означает физическое (по названию уровня) соединение. Из примеров коммутации первого уровня можно привести релейные коммутаторы некоторых старых телефонных и селекторных систем. В более новых телефонных системах коммутация первого уровня применяется совместно с различными способами сигнализации вызовов и усиления сигналов. В сетях передачи данных данная технология применяется в полностью оптических коммутаторах.Коммутация второго уровня
Рассматривая свойства второго уровня модели OSI и его классическое определение, увидим, что данному уровню принадлежит основная доля коммутирующих свойств.
Определение. Канальный уровень (формально называемый информационно-канальным уровнем) обеспечивает надежный транзит данных через физический канал. Канальный уровень решает вопросы физической адресации (в противоположность сетевой или логической адресации), топологии сети, линейной дисциплины (каким образом конечной системе использовать сетевой канал), уведомления о неисправностях, упорядоченной доставки блоков данных и управления потоком информации.
На самом деле, определяемая канальным уровнем модели OSI функциональность служит платформой для некоторых из сегодняшних наиболее эффективных технологий. Большое значение функциональности второго уровня подчеркивает тот факт, что производители оборудования продолжают вкладывать значительные средства в разработку устройств с такими функциями.
С технологической точки зрения, коммутатор локальных сетей представляет собой устройство, основное назначение которого - максимальное ускорение передачи данных за счет параллельно существующих потоков между узлами сети. В этом - его главное отличие от других традиционных устройств локальных сетей – концентраторов (Hub), предоставляющих всем потокам данных сети всего один канал передачи данных.
Коммутатор позволяет передавать параллельно несколько потоков данных c максимально возможной для каждого потока скоростью. Эта скорость ограничена физической спецификацией протокола, которую также часто называют "скоростью провода". Это возможно благодаря наличию в коммутаторе большого числа центров обработки и продвижения кадров и шин передачи данных.
Коммутаторы локальных сетей в своем основном варианте, ставшем классическим уже с начала 90-х годов, работают на втором уровне модели OSI, применяя свою высокопроизводительную параллельную архитектуру для продвижения кадров канальных протоколов. Другими словами, ими выполняются алгоритмы работы моста, описанные в стандартах IEEE 802.1D и 802.1H. Также они имеют и много других дополнительных функций, часть которых вошла в новую редакцию стандарта 802.1D-1998, а часть остается пока не стандартизованной.
Коммутаторы ЛВС отличаются большим разнообразием возможностей и, следовательно, цен - стоимость 1 порта колеблется в диапазоне от 50 до 1000 долларов. Одной из причин столь больших различий является то, что они предназначены для решения различных классов задач. Коммутаторы высокого класса должны обеспечивать высокую производительность и плотность портов, а также поддерживать широкий спектр функций управления. Простые и дешевые коммутаторы имеют обычно небольшое число портов и не способны поддерживать функции управления. Одним из основных различий является используемая в коммутаторе архитектура. Поскольку большинство современных коммутаторов работают на основе патентованных контроллеров ASIC, устройство этих микросхем и их интеграция с остальными модулями коммутатора (включая буферы ввода-вывода) играет важнейшую роль. Контроллеры ASIC для коммутаторов ЛВС делятся на 2 класса - большие ASIC, способные обслуживать множество коммутируемых портов (один контроллер на устройство) и небольшие ASIC, обслуживающие по несколько портов и объединяемые в матрицы коммутации.
Существует 3 варианта архитектуры коммутаторов:
- переключение (cross-bar) с буферизацией на входе,
- самомаршрутизация (self-route) с разделяемой памятью
- высокоскоростная шина.
На рисунке 3 показана блок-схема коммутатора с архитектурой, используемой для поочередного соединения пар портов. В любой момент такой коммутатор может обеспечить организацию только одного соединения (пара портов). При невысоком уровне трафика не требуется хранение данных в памяти перед отправкой в порт назначения - такой вариант называется коммутацией на лету cut-through. Однако, коммутаторы cross-bar требуют буферизации на входе от каждого порта, поскольку в случае использования единственно возможного соединения коммутатор блокируется (рисунок 4). Несмотря на малую стоимость и высокую скорость продвижения на рынок, коммутаторы класса cross-bar слишком примитивны для эффективной трансляции между низкоскоростными интерфейсами Ethernet или token ring и высокоскоростными портами ATM и FDDI.


Коммутаторы с разделяемой памятью имеют общий входной буфер для всех портов, используемый как внутренняя магистраль устройства (backplane). Буферизагия данных перед их рассылкой (store-and-forward - сохранить и переслать) приводит к возникновению задержки. Однако, коммутаторы с разделяемой памятью, как показано на рисунке 5 не требуют организации специальной внутренней магистрали для передачи данных между портами, что обеспечивает им более низкую цену по сравнению с коммутаторами на базе высокоскоростной внутренней шины.

На рисунке 6 показана блок-схема коммутатора с высокоскоростной шиной, связывающей контроллеры ASIC. После того, как данные преобразуются в приемлемый для передачи по шине формат, они помещаются на шину и далее передаются в порт назначения. Поскольку шина может обеспечивать одновременную (паралельную) передачу потока данных от всех портов, такие коммутаторы часто называют "неблокируемыми" (non-blocking) - они не создают пробок на пути передачи данных.

Применение аналогичной параллельной архитектуры для продвижения пакетов сетевых протоколов привело к появлению коммутаторов третьего уровня модели OSI.
Коммутация третьего уровня
В продолжении темы о технологиях коммутации рассмотренных в предыдущем номера повторим, что применение параллельной архитектуры для продвижения пакетов сетевых протоколов привело к появлению коммутаторов третьего уровня. Это позволило существенно, в 10-100 раз повысить скорость маршрутизации по сравнению с традиционными маршрутизаторами, в которых один центральный универсальный процессор выполняет программное обеспечение маршрутизации.
По определению Сетевой уровень (третий) - это комплексный уровень, который обеспечивает возможность соединения и выбор маршрута между двумя конечными системами, подключенными к разным "подсетям", которые могут находиться в разных географических пунктах. В данном случае "подсеть" это, по сути, независимый сетевой кабель (иногда называемый сегментом).
Коммутация на третьем уровне - это аппаратная маршрутизация. Традиционные маршрутизаторы реализуют свои функции с помощью программно-управляемых процессоров, что будем называть программной маршрутизацией. Традиционные маршрутизаторы обычно продвигают пакеты со скоростью около 500000 пакетов в секунду. Коммутаторы третьего уровня сегодня работают со скоростью до 50 миллионов пакетов в секунду. Возможно и дальнейшее ее повышение, так как каждый интерфейсный модуль, как и в коммутаторе второго уровня, оснащен собственным процессором продвижения пакетов на основе ASIC. Так что наращивание количества модулей ведет к наращиванию производительности маршрутизации. Использование высокоскоростной технологии больших заказных интегральных схем (ASIC) является главной характеристикой, отличающей коммутаторы третьего уровня от традиционных маршрутизаторов. Коммутаторы 3-го уровня делятся на две категории: пакетные (Packet-by-Packet Layer 3 Switches, PPL3) и сквозные (Cut-Through Layer 3 Switches, CTL3). PPL3 - означает просто быструю маршрутизацию (Рисунок_7). CTL3 – маршрутизацию первого пакета и коммутацию всех остальных (Рисунок 8).

У коммутатора третьего уровня, кроме реализации функций маршрутизации в специализированных интегральных схемах, имеется несколько особенностей, отличающих их от традиционных маршрутизаторов. Эти особенности отражают ориентацию коммутаторов 3-го уровня на работу, в основном, в локальных сетях, а также последствия совмещения в одном устройстве коммутации на 2-м и 3-м уровнях:
- поддержка интерфейсов и протоколов, применяемых в локальных сетях,
- усеченные функции маршрутизации,
- обязательная поддержка механизма виртуальных сетей,
- тесная интеграция функций коммутации и маршрутизации, наличие удобных для администратора операций по заданию маршрутизации между виртуальными сетями.
Наиболее "коммутаторная" версия высокоскоростной маршрутизации выглядит следующим образом (рисунок 9). Пусть коммутатор третьего уровня построен так, что в нем имеется информация о соответствии сетевых адресов (например, IP-адресов) адресам физического уровня (например, MAC-адресам) Все эти МАС-адреса обычным образом отображены в коммутационной таблице, независимо от того, принадлежат ли они данной сети или другим сетям.

Первый коммутатор, на который поступает пакет, частично выполняет функции маршрутизатора, а именно, функции фильтрации, обеспечивающие безопасность. Он решает, пропускать или нет данный пакет в другую сеть Если пакет пропускать нужно, то коммутатор по IP-адресу назначения определяет МАС-адрес узла назначения и формирует новый заголовок второго уровня с найденным МАС-адресом. Затем выполняется обычная процедура коммутации по данному МАС-адресу с просмотром адресной таблицы коммутатора. Все последующие коммутаторы, построенные по этому же принципу, обрабатывают данный кадр как обычные коммутаторы второго уровня, не привлекая функций маршрутизации, что значительно ускоряет его обработку. Однако функции маршрутизации не являются для них избыточными, поскольку и на эти коммутаторы могут поступать первичные пакеты (непосредственно от рабочих станций), для которых необходимо выполнять фильтрацию и подстановку МАС-адресов.
Это описание носит схематический характер и не раскрывает способов решения возникающих при этом многочисленных проблем, например, проблемы построения таблицы соответствия IP-адресов и МАС-адресов
Примерами коммутаторов третьего уровня, работающих по этой схеме, являются коммутаторы SmartSwitch компании Cabletron. Компания Cabletron реализовала в них свой протокол ускоренной маршрутизации SecureFast Virtual Network, SFVN.
Для организации непосредственного взаимодействия рабочих станций без промежуточного маршрутизатора необходимо сконфигурировать каждую из них так, чтобы она считала собственный интерфейс маршрутизатором по умолчанию. При такой конфигурации станция пытается самостоятельно отправить любой пакет конечному узлу, даже если этот узел находится в другой сети. Так как в общем случае (см. рисунок 10) станции неизвестен МАС-адрес узла назначения, то она генерирует соответствующий ARP-запрос, который перехватывает коммутатор, поддерживающий протокол SFVN. В сети предполагается наличие сервера SFVN Server, являющегося полноценным маршрутизатором и поддерживающего общую ARP-таблицу всех узлов SFVN-сети. Сервер возвращает коммутатору МАС-адрес узла назначения, а коммутатор, в свою очередь, передает его исходной станции. Одновременно сервер SFVN передает коммутаторам сети инструкции о разрешении прохождения пакета с МАС-адресом узла назначения через границы виртуальных сетей. Затем исходная станция передает пакет в кадре, содержащем МАС-адрес узла назначения. Этот кадр проходит через коммутаторы, не вызывая обращения к их блокам маршрутизации. Отличие протокола SFVN компании Cabletron от - описанной выше общей схемы в том, что для нахождения МАС-адреса по IP-адресу в сети используется выделенный сервер.
Протокол Fast IP компании 3Com является еще одним примером реализации подхода с отображением IP-адреса на МАС-адрес. В этом протоколе основными действующими лицами являются сетевые адаптеры (что не удивительно, так как компания 3Com является признанным лидером в производстве сетевых адаптеров Ethernet) С одной стороны, такой подход требует изменения программного обеспечения драйверов сетевых адаптеров, и это минус Но зато не требуется изменять все остальное сетевое оборудование.
При необходимости передать пакет узлу назначения другой сети, исходный узел в соответствии с технологией Fast IP должен передать запрос по протоколу NHRP (Next Hop Routing Protocol) маршрутизатору сети. Маршрутизатор переправляет этот запрос узлу назначения, как обычный пакет Узел назначения, который также поддерживает Fast IP и NHRP, получив запрос, отвечает кадром, отсылаемым уже не маршрутизатору, а непосредственно узлу-источнику (по его МАС-адресу, содержащемуся в NHRP-запросе). После этого обмен идет на канальном уровне на основе известных МАС-адресов. Таким образом, снова маршрутизировался только первый пакет потока (как на рисунке 9 кратковременный поток), а все остальные коммутировались (как на рисунке 9 долговременный поток).
Еще один тип коммутаторов третьего уровня — это коммутаторы, работающие с протоколами локальных сетей типа Ethernet и FDDI. Эти коммутаторы выполняют функции маршрутизации не так, как классические маршрутизаторы. Они маршрутизируют не отдельные пакеты, а потоки пакетов.
Поток — это последовательность пакетов, имеющих некоторые общие свойства. По меньшей мере, у них должны совпадать адрес отправителя и адрес получателя, и тогда их можно отправлять по одному и тому же маршруту. Если классический способ маршрутизации использовать только для первого пакета потока, а все остальные обрабатывать на основании опыта первого (или нескольких первых) пакетов, то можно значительно ускорить маршрутизацию всего потока.
Рассмотрим этот подход на примере технологии NetFlow компании Cisco, реализованной в ее маршрутизаторах и коммутаторах. Для каждого пакета, поступающего на порт маршрутизатора, вычисляется хэш-функция от IP-адресов источника, назначения, портов UDP или TCP и поля TOS, характеризующего требуемое качество обслуживания. Во всех маршрутизаторах, поддерживающих данную технологию, через которые проходит данный пакет, в кэш-памяти портов запоминается соответствие значения хэш-функции и адресной информации, необходимой для быстрой передачи пакета следующему маршрутизатору. Таким образом, образуется квазивиртуальный канал (см. Рисунок 11), который позволяет быстро передавать по сети маршрутизаторов все последующие пакеты этого потока. При этом ускорение достигается за счет упрощения процедуры обработки пакета маршрутизатором - не просматриваются таблицы маршрутизации, не выполняются ARP-запросы.
Этот прием может использоваться в маршрутизаторах, вообще не поддерживающих коммутацию, а может быть перенесен в коммутаторы. В этом случае такие коммутаторы тоже называют коммутаторами третьего уровня. Примеров маршрутизаторов, использующих данный подход, являются маршрутизаторы Cisco 7500, а коммутаторов третьего уровня — коммутаторы Catalyst 5000 и 5500. Коммутаторы Catalyst выполняют усеченные функции описанной схемы, они не могут обрабатывать первые пакеты потоков и создавать новые записи о хэш-функциях и адресной информации потоков. Они просто получают данную информацию от маршрутизаторов 7500 и обрабатывают пакеты уже распознанных маршрутизаторами потоков.
Выше был рассмотрен способ ускоренной маршрутизации, основанный на концепции потока. Его сущность заключается в создании квазивиртуальных каналов в сетях, которые не поддерживают виртуальные каналы в обычном понимании этого термина, то есть сетях Ethernet, FDDI, Token Ring и т п. Следует отличать этот способ от способа ускоренной работы маршрутизаторов в сетях, поддерживающих технологию виртуальных каналов — АТМ, frame relay, X 25. В таких сетях создание виртуального канала является штатным режимом работы сетевых устройств. Виртуальные каналы создаются между двумя конечными точками, причем для потоков данных, требующих разного качества обслуживания (например, для данных разных приложений) может создаваться отдельный виртуальный канал. Хотя время создания виртуального канала существенно превышает время маршрутизации одного пакета, выигрыш достигается за счет последующей быстрой передачи потока данных по виртуальному каналу. Но в таких сетях возникает другая проблема — неэффективная передача коротких потоков, то есть потоков, состоящих из небольшого количества пакетов (классический пример — пакеты протокола DNS).
Накладные расходы, связанные с созданием виртуального канала, приходящиеся на один пакет, снижаются при передаче объемных потоков данных. Однако они становятся неприемлемо высокими при передаче коротких потоков. Для того чтобы эффективно передавать короткие потоки, предлагается следующий вариант, при передаче нескольких первых пакетов выполняется обычная маршрутизация. Затем, после того как распознается устойчивый поток, для него строится виртуальный канал, и дальнейшая передача данных происходит с высокой скоростью по этому виртуальному каналу. Таким образом, для коротких потоков виртуальный канал вообще не создается, что и повышает эффективность передачи.
По такой схеме работает ставшая уже классической технология IP Switching компании Ipsilon. Для того чтобы сети коммутаторов АТМ передавали бы пакеты коротких потоков без установления виртуального канала, компания Ipsilon предложила встроить во все коммутаторы АТМ блоки IP-маршрутизации (рисунок 12), строящие обычные таблицы маршрутизации по обычным протоколам RIP и OSPF.
Компания Cisco Systems выдвинула в качестве альтернативы технологии IP Switching свою собственную технологию Tag Switching, но она не стала стандартной. В настоящее время IETF работает над стандартным протоколом обмена метками MPLS (Multi-Protocol Label Switching), который обобщает предложение компаний Ipsilon и Cisco, а также вносит некоторые новые детали и механизмы. Этот протокол ориентирован на поддержку качества обслуживания для виртуальных каналов, образованных метками.
Коммутация четвертого уровня
Свойства четвертого или транспортного уровня модели OSI следующие: транспортный уровень обеспечивает услуги по транспортировке данных. В частности, заботой транспортного уровня является решение таких вопросов, как выполнение надежной транспортировки данных через объединенную сеть. Предоставляя надежные услуги, транспортный уровень обеспечивает механизмы для установки, поддержания и упорядоченного завершения действия виртуальных каналов, систем обнаружения и устранения неисправностей транспортировки и управления информационным потоком (с целью предотвращения переполнения данными из другой системы).
Некоторые производители заявляют, что их системы могут работать на втором, третьем и даже четвертом уровнях. Однако рассмотрение описания стека TCP/IP (рисунок 1), а также структуры пакетов IP и TCP (рисунки 2, 3), показывает, что коммутация четвертого уровня является фикцией, так как все относящиеся к коммутации функции осуществляются на уровне не выше третьего. А именно, термин коммутация четвертого уровня с точки зрения описания стека TCP/IP противоречий не имеет, за исключением того, что при коммутации должны указываться адреса компьютера (маршрутизатора) источника и компьютера (маршрутизатора) получателя. Пакеты TCP имеют поля локальный порт отправителя и локальный порт получателя (рисунок 3), несущие смысл точек входа в приложение (в программу), например Telnet с одной стороны, и точки входа (в данном контексте инкапсуляции) в уровень IP. Кроме того, в стеке TCP/IP именно уровень TCP занимается формированием пакетов из потока данных идущих от приложения. Пакеты IP (рисунок 2) имеют поля адреса компьютера (маршрутизатора) источника и компьютера (маршрутизатора) получателя и следовательно могут наряду с MAC адресами использоваться для коммутации. Тем не менее, название прижилось, к тому же практика показывает, что способность системы анализировать информацию прикладного уровня может оказаться полезной — в частности для управления трафиком. Таким образом, термин "зависимый от приложения" более точно отражает функции так называемых коммутаторов четвертого уровня.


Тематики
EN
Русско-английский словарь нормативно-технической терминологии > технология коммутации
75 БПБ
2) Oil: боковые полосы безопасности76 inertial navigation unit
БИН, блок инерциальной навигации (включает в себя ИИБ, блоки электроники» сельсины, вычислитель, задатчики последовательности режимов, блоки электроники устройств ввода-вывода, магнитную память и вторичные источники питания)Англо-русский словарь промышленной и научной лексики > inertial navigation unit
77 IOPB
I/O parameter block — блок параметров ввода-вывода ( содержащий параметры одной команды обращения к дисковой памяти)78 двунаправленный список
1. bidirectional list2. two-way list3. both way list4. double-liked listРусско-английский большой базовый словарь > двунаправленный список
79 система управления вводом - выводом
Русско-английский словарь по информационным технологиям > система управления вводом - выводом
80 распределительная шина
распределительная шина
Шина в пределах одной секции НКУ, соединенная со сборной шиной и питающая устройство вывода.
[ ГОСТ Р 51321. 1-2000 ( МЭК 60439-1-92)]
распределительная шина
Шина, входящая в состав одной секции НКУ, соединенная со сборной шиной и питающая устройство вывода.
Примечание — Проводники, соединяющие функциональный блок и шину, не являются частью распределительных шин.
[ ГОСТ Р МЭК 61439.1-2013]EN
distribution busbar
busbar within one section which is connected to a main busbar and from which outgoing units are supplied
[IEC 61439-1, ed. 1.0 (2009-01)]FR
jeu de barres de distribution
jeu de barres à l'intérieur d'une colonne qui est raccordé à un jeu de barres principal et à partir duquel des unités de départ sont alimentées
[IEC 61439-1, ed. 1.0 (2009-01)]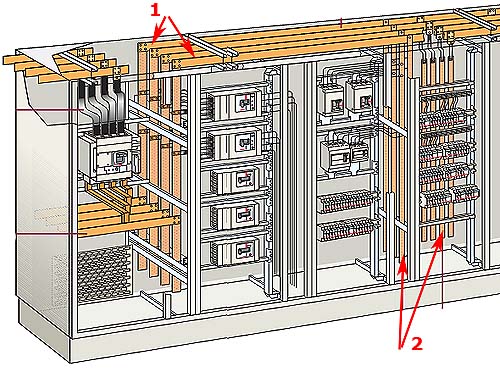
Рис. Legrand
1 - Сборная шина
2 - Распределительные шины
Рис. Schneider Electric:Main busbar - Сборная шина
Distribution busbars - Распределительные шины
A: Incoming device - А: Аппарат ввода
D: Outgoing device - D: Аппарат выводаТематики
- НКУ (шкафы, пульты,...)
EN
FR
Русско-английский словарь нормативно-технической терминологии > распределительная шина
СтраницыСм. также в других словарях:
Устройство ввода-вывода — Устройство ввода вывода компонент типовой архитектуры ЭВМ, предоставляющий компьютеру возможность взаимодействия с внешним миром и, в частности, с пользователями и другими компьютерами. Подразделяются на: Устройство ввода Устройство вывода… … Википедия
Устройства ввода-вывода — Компьютерное устройство ввода вывода компонент типовой архитектуры ЭВМ, предоставляющее компьютеру возможность взаимодействия с внешним миром и, в частности, с пользователями и другими компьютерами. Устройства ввода/вывода Устройство ввода… … Википедия
Устройство ввода/вывода — Компьютерное устройство ввода вывода компонент типовой архитектуры ЭВМ, предоставляющее компьютеру возможность взаимодействия с внешним миром и, в частности, с пользователями и другими компьютерами. Устройства ввода/вывода Устройство ввода… … Википедия
Каналы ввода-вывода — (англ. IOC input output channel), далее КВВ, и интерфейсы обеспечивают взаимодействие центральных устройств машины и периферийных устройств. КВВ самостоятельные в логическом отношении устройства, которые работают под управлением… … Википедия
блок-мультиплексный канал — Канал ввода вывода, выполняющий операции в блок мультиплексном или монопольном режиме. [ГОСТ Р 50304 92 ] Тематики системы для сопряж. радиоэлектр. средств интерфейсные Обобщающие термины средства реализации взаимодействия EN block multiplex… … Справочник технического переводчика
блок — 23.02.13 блок* [block]: Часть текста, определенная пользователем, с которой проводят операции обработки текста. Источник: ГОСТ Р ИСО/МЭК 2382 23 2004: Информационная технология. Словарь. Часть 23. Обработка текста … Словарь-справочник терминов нормативно-технической документации
блок-мультиплексный канал — 63 блок мультиплексный канал: Канал ввода вывода, выполняющий операции в блок мультиплексном или монопольном режиме Источник: ГОСТ Р 50304 92: Системы для сопряжения радиоэлектронных средств интерфейсные. Термины и определения … Словарь-справочник терминов нормативно-технической документации
Блок-мультиплексный канал — 1. Канал ввода вывода, выполняющий операции в блок мультиплексном или монопольном режиме Употребляется в документе: ГОСТ Р 50304 92 Системы для сопряжения радиоэлектронных средств интерфейсные. Термины и определения … Телекоммуникационный словарь
Блок операций с плавающей точкой — Математический сопроцессор 80x287 в колодке на базовой плате персонального компьютера. Сопроцессор Motorola 68881 Математический сопроцессор сопроцессор для расширения командного множества центрального процессора и обеспечивающий его… … Википедия
Устройство вывода — Устройства вывода периферийные устройства, преобразующие результаты обработки цифровых машинных кодов в форму, удобную для восприятия человеком или пригодную для воздействия на исполнительные органы объекта управления. Содержание 1… … Википедия
Указательное устройство ввода — Устройства ввода приборы для занесения (ввода) данных в компьютер во время его работы. Содержание 1 Разновидности устройств ввода 1.1 Устройства ввода графической информации … Википедия
 18+© Академик, 2000-2024
18+© Академик, 2000-2024- Обратная связь: Техподдержка, Реклама на сайте
Экспорт словарей на сайты, сделанные на PHP, Joomla, Drupal, WordPress, MODx.
Перевод: с русского на все языки
со всех языков на русский- Со всех языков на:
- Русский
- С русского на:
- Все языки
- Английский
- Испанский
- Итальянский
- Немецкий
- Французский