-
81 sensor
- чувствительный элемент
- сенсор
- первичный измерительный преобразователь
- датчик (металлургия)
- датчик (в автотранспортных средствах)
- датчик
датчик
Средство измерений, предназначенное для выработки сигнала измерительной информации в форме, удобной для передачи, дальнейшего преобразования, обработки и (или) хранения, но не поддающейся непосредственному восприятию наблюдателем (по РМГ 29).
[ ГОСТ Р 51086-97]
датчик
Конструктивно обособленный первичный преобразователь, от которого поступают измерительные сигналы (он «дает» информацию).
Примечания
1. Датчик может быть вынесен на значительное расстояние от средства измерений, принимающего его сигналы.
2. В области измерений ионизирующих излучений применяют термин детектор.
Пример. Датчики запущенного метеорологического радиозонда передают измерительную информацию о температуре, давлении, влажности и других параметрах атмосферы.
[РМГ 29-99]
датчик
Конструктивно обособленный первичный преобразователь, от которого поступают измерительные сигналы.
[РД 01.120.00-КТН-228-06]
датчик
Первичный преобразователь, в котором изменения значений выходного воздействия или сигнала с заданной точностью соответствуют изменениям значений входного воздействия или сигнала.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]
КЛАССИФИКАЦИЯ
Классификация по виду выходных величин
Классификация по измеряемому параметру
- Датчики давления
- Датчики расхода
- Уровня
- Температуры
- Датчик концентрации
- Радиоактивности (также именуются детекторами радиоактивности или излучений)
- Перемещения
- Положения
- Фотодатчики
- Датчик углового положения
- Датчик вибрации
- Датчик механических величин
- Датчик дуговой защиты
Классификация по принципу действия
- Оптические датчики (фотодатчики)
- Магнитоэлектрический датчик (На основе эффекта Холла)
- Пьезоэлектрический датчик
- Тензо преобразователь
- Ёмкостной датчик
- Потенциометрический датчик
- Индуктивный датчик
Классификация по характеру выходного сигнала
Классификация по среде передачи сигналов
Классификация по количеству входных величин
Классификация по технологии изготовления
[ http://omop.su/article/49/74929.html]
Тематики
- автоматизация, основные понятия
- датчики и преобразователи физических величин
- метрология, основные понятия
- средства автоматизации прочие
Обобщающие термины
EN
датчик
Компонент, сконструированный для идентификации передачи на контроллер данных о характере вращения одного или более колеса транспортного средства в процессе торможения.
[ ГОСТ Р 41.13-2007]
датчик
Элемент, предназначенный для определения и передачи регуляторам сигнала, касающегося условий вращения колес(а) или динамических условий движения транспортного средства.
[ ГОСТ Р 41.13-Н-99]Тематики
EN
датчик
Элемент (первичный преобразователь) измерит., сигнального регулир. или управл. устрва системы, преобраз. контролир. величину (давление, темп-ру, частоту, скорость, перемещение, напряжение, электрич. ток и т.п.) в сигнал, удобный для измерения, передачи, преобразования, хранения и регистрации, а также для воздействия им на управляемые процессы. В состав д. входит воспринимающий (чувствит.) орган и один или неск. промежут. преобразователей. Часто д. состоит только из одного воспринимающего органа (напр., термопара, тензодатчик и др.).
В металлургии наиболее распространены д., действие к-рых основано на изменении электрич. сопротивления, емкости и индуктивности электрич. цепи (реостатный, емкостной, индуктивный датчик и др.), а также на возникновении ЭДС при воздействии контролир. механич., тепловых, электрических, магнитных и оптич. величин (тензодатчик, датчик перемещения, пьезоэлектрический датчик, датчик давления, фотоэлемент).
[ http://metaltrade.ru/abc/a.htm]Тематики
EN
первичный измерительный преобразователь
первичный преобразователь
ПИП
Измерительный преобразователь, на который непосредственно воздействует измеряемая физическая величина, т.е. первый преобразователь в измерительной цепи измерительного прибора (установки, системы).
Примечание. В одном средстве измерений может быть несколько первичных преобразователей.
Примеры
1. Термопара в цепи термоэлектрического термометра.
2. Ряд первичных преобразователей измерительной контролирующей системы, расположенных в разных точках контролируемой среды
[РМГ 29-99].
Тематики
- метрология, основные понятия
Синонимы
EN
DE
FR
сенсор
Высокочувствительная составная часть извещателя, датчика, предназначенная для регистрации и преобразования сигналов о нормированном изменении контролируемого параметра в электрические сигналы о нормированном изменении контролируемого параметра (упругих волн, давления, физического состояния).
[РД 25.03.001-2002]Тематики
EN
чувствительный элемент
Часть управляющего устройства, предназначенная для восприятия воздействующей величины, на которую реагирует чувствительное управляющее устройство.
[ГОСТ IЕС 60730-1-2011]
чувствительный элемент
датчик
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]EN
sensing element
that part of the control which is intended to be exposed to the influences of the activating quantity to which the automatic action of a sensing control responds
[IEC 60730-1, ed. 5.0 (2013-11)]FR
élément sensible
partie d'un dispositif de commande qui est destinée à être exposée à l'influence de la grandeur de manœuvre à laquelle répond l'action automatique d'un dispositif sensible
[IEC 60730-1, ed. 5.0 (2013-11)]Тематики
- электротехника, основные понятия
Синонимы
EN
FR
3.3.2 датчик (sensor): Функциональный блок газоанализатора, в котором расположен первичный преобразователь.
Источник: ГОСТ Р 52350.29.1-2010: Взрывоопасные среды. Часть 29-1. Газоанализаторы. Общие технические требования и методы испытаний газоанализаторов горючих газов оригинал документа
3.5 датчик (sensor): Устройство, изготовленное из непроводящего жаростойкого материала, в которое вмонтирован калориметр.
Источник: ГОСТ Р 12.4.234-2007: Система стандартов безопасности труда. Одежда специальная для защиты от термических рисков электрической дуги. Общие технические требования и методы испытаний оригинал документа
3.46 датчик (sensor): Сборочная единица, в которой расположен чувствительный элемент, которая также может содержать элементы электрической схемы.
Источник: ГОСТ Р 52350.29.2-2010: Взрывоопасные среды. Часть 29-2. Газоанализаторы. Требования к выбору, монтажу, применению и техническому обслуживанию газоанализаторов горючих газов и кислорода оригинал документа
3.3. датчик (sensor): Элемент конструкции коврика или пола, реагирующего на давление, содержащий эффективную чувствительную область; воздействие силы на эту область заставляет изменять состояние сигнала от датчика до блока управления.
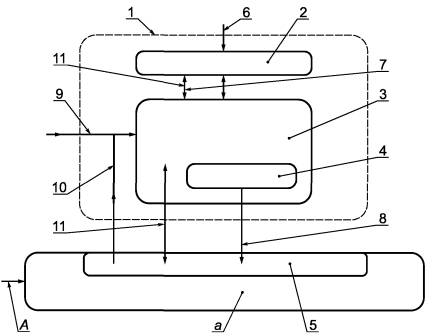
1 - обработка выходного сигнала коврика или пола, реагирующего на давление; 6 - воздействующая сила; 7 - выход датчика;
Рисунок 1 - Схема конструкции коврика или пола, реагирующего на давление, для работы с машиной
3.2 первичный измерительный преобразователь (sensor): Измерительный преобразователь, на который непосредственно воздействует явление, физический объект или вещество, являющееся носителем величины, подлежащей измерению.
1 Чувствительная катушка платинового термометра сопротивления.
2 Ротор турбинного расходомера.
3 Трубка Бурдона в манометре.
4 Фотоэлемент спектрометра.
5 Термотропный жидкий кристалл, который изменяет цвет в зависимости от температуры.
Источник: ГОСТ Р 8.673-2009: Государственная система обеспечения единства измерений. Датчики интеллектуальные и системы измерительные интеллектуальные. Основные термины и определения оригинал документа
Англо-русский словарь нормативно-технической терминологии > sensor
-
82 transmitting transducer
датчик
Средство измерений, предназначенное для выработки сигнала измерительной информации в форме, удобной для передачи, дальнейшего преобразования, обработки и (или) хранения, но не поддающейся непосредственному восприятию наблюдателем (по РМГ 29).
[ ГОСТ Р 51086-97]
датчик
Конструктивно обособленный первичный преобразователь, от которого поступают измерительные сигналы (он «дает» информацию).
Примечания
1. Датчик может быть вынесен на значительное расстояние от средства измерений, принимающего его сигналы.
2. В области измерений ионизирующих излучений применяют термин детектор.
Пример. Датчики запущенного метеорологического радиозонда передают измерительную информацию о температуре, давлении, влажности и других параметрах атмосферы.
[РМГ 29-99]
датчик
Конструктивно обособленный первичный преобразователь, от которого поступают измерительные сигналы.
[РД 01.120.00-КТН-228-06]
датчик
Первичный преобразователь, в котором изменения значений выходного воздействия или сигнала с заданной точностью соответствуют изменениям значений входного воздействия или сигнала.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]
КЛАССИФИКАЦИЯ
Классификация по виду выходных величин
Классификация по измеряемому параметру
- Датчики давления
- Датчики расхода
- Уровня
- Температуры
- Датчик концентрации
- Радиоактивности (также именуются детекторами радиоактивности или излучений)
- Перемещения
- Положения
- Фотодатчики
- Датчик углового положения
- Датчик вибрации
- Датчик механических величин
- Датчик дуговой защиты
Классификация по принципу действия
- Оптические датчики (фотодатчики)
- Магнитоэлектрический датчик (На основе эффекта Холла)
- Пьезоэлектрический датчик
- Тензо преобразователь
- Ёмкостной датчик
- Потенциометрический датчик
- Индуктивный датчик
Классификация по характеру выходного сигнала
Классификация по среде передачи сигналов
Классификация по количеству входных величин
Классификация по технологии изготовления
[ http://omop.su/article/49/74929.html]
Тематики
- автоматизация, основные понятия
- датчики и преобразователи физических величин
- метрология, основные понятия
- средства автоматизации прочие
Обобщающие термины
EN
Англо-русский словарь нормативно-технической терминологии > transmitting transducer
-
83 integral strip line junction
интегральный полосковый узел
Полосковый узел, все элементы которого не могут рассматриваться как отдельные изделия, а нераздельно связаны и электрически соединены между собой так, что устройство рассматривается как единое конструктивно оформленное целое.
[ ГОСТ 21702-76]Тематики
- устройства свч, полосковые линии
EN
7. Интегральный полосковый узел
Integral strip line junction
Полосковый узел, все элементы которого не могут рассматриваться как отдельные изделия, а нераздельно связаны и электрически соединены между собой так, что устройство рассматривается как единое конструктивно оформленное целое
Источник: ГОСТ 21702-76: Устройства СВЧ. Полосковые линии. Термины и определения оригинал документа
Англо-русский словарь нормативно-технической терминологии > integral strip line junction
-
84 microscope column
колонна электронного микроскопа
колонна
Совокупность конструктивно объединенных электронно-оптических и механических элементов электронного микроскопа.
[ ГОСТ 21006-75]Тематики
Обобщающие термины
Синонимы
EN
DE
28. Колонна электронного микроскопа
Колонна
D. Mikroskoprohr
E. Microscope column
-
Совокупность конструктивно объединенных электронно-оптических и механических элементов электронного микроскопа
Источник: ГОСТ 21006-75: Микроскопы электронные. Термины, определения и буквенные обозначения оригинал документа
Англо-русский словарь нормативно-технической терминологии > microscope column
-
85 switching device communication switching group
коммутационная группа коммутационного прибора связи
КГ
Совокупность коммутационных элементов связи, объединенных конструктивно или функционально и осуществляющих при внешнем воздействии одновременную коммутацию физических цепей ЕАСС.
Примечание
Коммутационная группа может содержать 1, 2, 3 ¼ коммутационных элементов связи.
[ ГОСТ 19472-88]Тематики
Синонимы
- КГ
EN
100. Коммутационная группа коммутационного прибора связи
кг
Switching device communication switching group
Совокупность коммутационных элементов связи, объединенных конструктивно или функционально и осуществляющих при внешнем воздействии одновременную коммутацию физических цепей ЕАСС.
Примечание. Коммутационная группа может содержать 1, 2, 3... коммутационных элементов связи
Источник: ГОСТ 19472-88: Система автоматизированной телефонной связи общегосударственная. Термины и определения оригинал документа
Англо-русский словарь нормативно-технической терминологии > switching device communication switching group
-
86 switching unit
коммутационный агрегат
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
коммутационный аппарат
Аппарат, предназначенный для включения или отключения тока в одной или нескольких электрических цепях.
МЭК 60050(441-14-01).
Примечание. Коммутационный аппарат может совершать одну из этих операций или обе
[ ГОСТ Р 50030. 1-2000 ( МЭК 60947-1-99)]
коммутационный аппарат
Электрический аппарат, предназначенный для коммутации электрической цепи и снятия напряжения с части электроустановки (выключатель, выключатель нагрузки, отделитель, разъединитель, автомат, рубильник, пакетный выключатель, предохранитель и т.п.).
[ПОТ Р М-016-2001]
[РД 153-34.0-03.150-00]EN
switching device
a device designed to make or break the current in one or more electric circuits
[IEV number 441-14-01]FR
appareil de connexion
appareil destiné à établir ou à interrompre le courant dans un ou plusieurs circuits électriques
[IEV number 441-14-01]Тематики
- аппарат, изделие, устройство...
EN
DE
FR
коммутационный блок
Конструктивно законченная совокупность коммутационных приборов связи, имеющих все или часть общих выходов и промежуточных линий коммутационного поля.
[ ГОСТ 19472-88]Тематики
EN
переключатель
Контактный коммутационный аппарат, предназначенный для переключения электрических цепей.
[ ГОСТ 17703-72]
переключатель
коммутатор
-
[IEV number 151-12-22]EN
switch
device for changing the electric connections among its terminals
[IEV number 151-12-22]FR
commutateur (1), m
dispositif destiné à modifier les connexions électriques entre ses bornes
[IEV number 151-12-22]Тематики
- аппарат, изделие, устройство...
- выключатель, переключатель
Классификация
>>>EN
- changer
- changerswitch key
- chopper switch
- circuit changer
- interchanging switchswitcher
- switch
- switching key
- switching unit
DE
FR
103. Коммутационный блок
Switching unit
Конструктивно законченная совокупность коммутационных приборов связи, имеющих все или часть общих выходов и промежуточных линий коммутационного поля
Источник: ГОСТ 19472-88: Система автоматизированной телефонной связи общегосударственная. Термины и определения оригинал документа
Англо-русский словарь нормативно-технической терминологии > switching unit
-
87 capacitor networks
конденсаторная сборка
Группа конструктивно-объединенных конденсаторов, допускающая самостоятельное подключение любого конденсатора к внешней цепи.
[ ГОСТ 21415-75]Тематики
EN
DE
FR
D. Kondensatorenbaugruppe
E. Capacitor networks
F. Ensemble des condensateurs
Группа конструктивно-объединенных конденсаторов, допускающая самостоятельное подключение любого конденсатора к внешней цепи
Источник: ГОСТ 21415-75: Конденсаторы. Термины и определения оригинал документа
Англо-русский словарь нормативно-технической терминологии > capacitor networks
-
88 programmable logic controller
контроллер с программируемой логикой
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего. Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы. Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7. Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series. Рис. 4. Резервированный контроллер FCP270.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA). Рис. 5. Контроллер AC800M.
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > programmable logic controller
89 oil system block
маслоагрегат
Несколько агрегатов масляной системы ГТД, конструктивно объединенные в единый узел.
[ ГОСТ 23851-79]Тематики
EN
DE
FR
198. Маслоагрегат
D. Olaggregat
E. Oil system block
F. Bloc-pompes à huile
Несколько агрегатов масляной системы ГТД, конструктивно объединенные в единый узел
Источник: ГОСТ 23851-79: Двигатели газотурбинные авиационные. Термины и определения оригинал документа
Англо-русский словарь нормативно-технической терминологии > oil system block
90 cold lead
охлаждаемый токоподвод
ненагреваемый токоподвод
охлаждаемый вывод
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999]Тематики
- электротехника, основные понятия
Синонимы
EN
холодный конец
Электрически изолированный провод или провода, используемые для присоединения нагревателя к параллельной цепи, конструктивно выполнены таким образом, что они не являются источником нагрева.
[ ГОСТ Р МЭК 60050-426-2006]
Тематики
EN
3.3.1 холодный вывод (cold lead): Электрически изолированный провод или провода, используемые для подсоединения электронагревателя к параллельной цепи, конструктивно выполненные таким образом, что они не являются источниками нагрева.
Источник: ГОСТ Р МЭК 60079-30-1-2009: Взрывоопасные среды. Резистивный распределенный электронагреватель. Часть 30-1. Общие технические требования и методы испытаний оригинал документа
Англо-русский словарь нормативно-технической терминологии > cold lead
91 strip transmission line
полосковая линия передачи
полосковая линия
Одно-, двух- или трехпроводная линия передачи сверхвысоких частот с поперечным сечением в виде параллельных прямых или отрезков прямых, лежащих на одной прямой.
Примечания
1. Представление поперечного сечения в виде прямой является идеализацией. Реальные проводящие слои имеют конечную толщину.
2. Полосковые линии передачи по конструктивно-технологическому выполнению подразделяются на воздушно-полосковые, микрополосковые и др.
[ ГОСТ 21702-76]Тематики
- устройства свч, полосковые линии
Синонимы
EN
1. Полосковая линия передачи
Полосковая линия
Strip transmission line
Одно-, двух- или трехпроводная линия передачи сверхвысоких частот с поперечным сечением в виде параллельных прямых или отрезков прямых, лежащих на одной прямой.
Примечания:
1. Представление поперечного сечения в виде прямой является идеализацией. Реальные проводящие слои имеют конечную толщину.
2. Полосковые линии передачи по конструктивно-технологическому выполнению подразделяются на воздушно-полосковые, микрополосковые и др.
Источник: ГОСТ 21702-76: Устройства СВЧ. Полосковые линии. Термины и определения оригинал документа
Англо-русский словарь нормативно-технической терминологии > strip transmission line
92 strip element
полосковый элемент
Конструктивно неделимая часть полоскового узла, являющаяся элементом с распределенными параметрами принципиальной электрической схемы полоскового узла.
[ ГОСТ 21702-76]Тематики
- устройства свч, полосковые линии
EN
9. Полосковый элемент
Strip element
Конструктивно неделимая часть полоскового узла, являющаяся элементом с распределенными параметрами принципиальной электрической схемы полоскового узла
Источник: ГОСТ 21702-76: Устройства СВЧ. Полосковые линии. Термины и определения оригинал документа
Англо-русский словарь нормативно-технической терминологии > strip element
93 packaged tube
прибор СВЧ пакетированной конструкции
Электровакуумный прибор СВЧ, конструктивно объединенный с магнитной системой, создающей фокусирующее или рабочее магнитное поле в приборе.
[ ГОСТ 23769-79]Тематики
EN
29. Прибор СВЧ пакетированной конструкции
Packaged tube
-
Электровакуумный прибор СВЧ, конструктивно объединенный с магнитной системой, создающей фокусирующее или рабочее магнитное поле в приборе
Источник: ГОСТ 23769-79: Приборы электронные и устройства защитные СВЧ. Термины, определения и буквенные обозначения оригинал документа
Англо-русский словарь нормативно-технической терминологии > packaged tube
94 built-in power supply tube
прибор СВЧ со встроенным источником питания
Прибор СВЧ, конструктивно объединенный с источником питания.
[ ГОСТ 23769-79]Тематики
EN
22. Прибор СВЧ со встроенным источником питания
Built-in power supply tube
-
Прибор СВЧ, конструктивно объединенный с источником питания
Источник: ГОСТ 23769-79: Приборы электронные и устройства защитные СВЧ. Термины, определения и буквенные обозначения оригинал документа
Англо-русский словарь нормативно-технической терминологии > built-in power supply tube
95 programmable controller
программируемый контроллер
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > programmable controller
96 storage-programmable logic controller
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > storage-programmable logic controller
97 computer family
семейство ЭВМ
Группа ЭВМ, представляющих параметрический ряд, имеющих единую архитектуру и, в большинстве случаев, одинаковую конструктивно-технологическую базу и характеризующихся полной или ограниченной некоторыми условиями программной совместимостью.
[ ГОСТ 15971-90]Тематики
EN
50. Семейство ЭВМ
Computer family
Группа ЭВМ, представляющих параметрический ряд, имеющих единую архитектуру и, в большинстве случаев, одинаковую конструктивно-технологическую базу и характеризующихся полной или ограниченной некоторыми условиями программной совместимостью
Источник: ГОСТ 15971-90: Системы обработки информации. Термины и определения оригинал документа
Англо-русский словарь нормативно-технической терминологии > computer family
98 inlet boundary layer control system
система управления пограничным слоем в воздухозаборнике
система управления пограничным слоем
Конструктивно-объединенная совокупность устройств, обеспечивающих уменьшение или устранение отрыва пограничного слоя потока воздуха в канале воздухозаборника двигателя.
[ ГОСТ 23851-79]Тематики
Синонимы
EN
DE
FR
186. Система управления пограничным слоем в воздухозаборнике
Система управления пограничным слоем
D. Steuerungssystem der Grenzschicht im Lufteintritt
E. Inlet boundary layer control system
F. Système de commande de la couche limite dans la prise d’air
Конструктивно-объединенная совокупность устройств, обеспечивающих уменьшение или устранение отрыва пограничного слоя потока воздуха в канале воздухозаборника двигателя
Источник: ГОСТ 23851-79: Двигатели газотурбинные авиационные. Термины и определения оригинал документа
Англо-русский словарь нормативно-технической терминологии > inlet boundary layer control system
99 flange joint
торцовое соединение
Ндп. боковое соединение
Сварное соединение, в котором боковые поверхности сваренных элементов примыкают друг к другу

[ ГОСТ 2601-84]
торцовое соединение
Тип соединения, при котором угол между поверхностями двух деталей в месте примыкания кромок составляет от 0° до 30°
[ ГОСТ Р ИСО 17659-2009] [ISO 17659:2002]EN
edge joint
type of joint where two parts meet at their edges at an angle of 0° to 30°
[ ГОСТ Р ИСО 17659-2009] [ISO 17659:2002]FR
assemblage sur chant
type d'assemblage dans lequel deux pièces en contact par leurs arкtes forment entre elles un angle compris entre 0° et 30°
[ ГОСТ Р ИСО 17659-2009] [ISO 17659:2002]Недопустимые, нерекомендуемые
Тематики
- сварка, резка, пайка
EN
DE
FR
фланцевое соединение двигателя-генератора
фланцевое соединение
Жесткое соединение конструктивно согласованных корпусов первичного двигателя и генератора в общий блок с помощью болтов или шпилек.
[ ГОСТ 20375-83]Тематики
Синонимы
EN
DE
28. Фланцевое соединение двигателя-генератора
Фланцевое соединение
D. Flanschverbindung
E. Flange joint
Жесткое соединение конструктивно согласованных корпусов первичного двигателя и генератора в общий блок с помощью болтов или шпилек
Источник: ГОСТ 20375-83: Электроагрегаты и передвижные электростанции с двигателями внутреннего сгорания. Термины и определения оригинал документа
Англо-русский словарь нормативно-технической терминологии > flange joint
100 constructively definable
Большой англо-русский и русско-английский словарь > constructively definable
СтраницыСм. также в других словарях:
конструктивно — конструктивно … Орфографический словарь-справочник
конструктивно — деловито, полезно, дельно, путево, плодотворно, толково, с толком, с чувством, с толком, с расстановкой, разумно, применимо, с умом, умно Словарь русских синонимов. конструктивно см. дельно Словарь синонимов русского языка. Практический… … Словарь синонимов
конструктивно-силовая схема — Рис. 1. Конструктивно‑силовые схемы крыльев пассажирского самолёта. конструктивно силовая схема — принципиальная схема расположения основных продольных и поперечных силовых элементов конструкции авиационной, а также размещения панелей,… … Энциклопедия «Авиация»
конструктивно-силовая схема — Рис. 1. Конструктивно‑силовые схемы крыльев пассажирского самолёта. конструктивно силовая схема — принципиальная схема расположения основных продольных и поперечных силовых элементов конструкции авиационной, а также размещения панелей,… … Энциклопедия «Авиация»
Конструктивно-силовая схема — принципиальная схема расположения основных продольных и поперечных силовых элементов конструкции авиационной, а также размещения панелей, поперечных и продольных стыков, на которой указаны способы и типы крепления агрегатов планёра, двигателей,… … Энциклопедия техники
конструктивно-технологическое подобие изделий — Совокупность конструктивных и (или) технологических признаков изделий, позволяющих объединить их в одну конструктивно технологическую группу для проведения испытаний. [ГОСТ Р 53711 2009] Тематики испытания и контроль качества продукции … Справочник технического переводчика
Конструктивно-подобная модель — см. в статье Динамически подобная модель. Авиация: Энциклопедия. М.: Большая Российская Энциклопедия. Главный редактор Г.П. Свищев. 1994 … Энциклопедия техники
Конструктивно-экологическое движение России «Кедр» — Конструктивно экологическое движение России «Кедр» неполитическая общественная организация. Движение создано и официально зарегистрировано в 1993 году и в настоящий момент насчитывает более 200 тысяч членов в 70 регионах… … Википедия
конструктивно выполненный — конструктивно выполненный … Орфографический словарь-справочник
конструктивно законченный — конструктивно законченный … Орфографический словарь-справочник
конструктивно обособленный — конструктивно обособленный … Орфографический словарь-справочник
 18+© Академик, 2000-2024
18+© Академик, 2000-2024- Обратная связь: Техподдержка, Реклама на сайте
Экспорт словарей на сайты, сделанные на PHP, Joomla, Drupal, WordPress, MODx.
Перевод: с английского на все языки
со всех языков на английский- Со всех языков на:
- Английский
- С английского на:
- Все языки
- Болгарский
- Русский
- Украинский