-
81 белый кружок
Makarov: open circle (на рисунке), unfilled circle (на рисунке) -
82 контурный
1) General subject: adumbrant, adumbrative, contour, in outline (о рисунке), outline, outlinear, sketchy, unshaded2) Computers: truetype3) Mathematics: boundary4) Architecture: unshaded (о рисунке)5) Art: fine-line6) Cardiology: T. (трехконтурное терморегулирующее устройство - heater cooler 3T.)7) Cartography: black-and-white, contoured, planimetric8) Automation: continuous path, form, profile, profiled9) Makarov: skeleton -
83 чёткий
1) General subject: accurate, businesslike, clear, clear cut, clear-cut, concise, crisp, distinct, exact, hair-line, intelligible, legible, neat, orotund, pellucid, precise, readable, sharp, sharp-cut, trenchant, unfussy2) Engineering: sharply defined (об изображении)3) Mathematics: precise4) Textile: distinct (о рисунке), pronounced, sharp (о рисунке)5) Jargon: snappy6) Information technology: explicit7) Business: well-defined8) Quality control: positive-acting9) Phraseological unit: bright-line rule (A clear-cut) -
84 четкий
1) General subject: accurate, businesslike, clear, clear cut, clear-cut, concise, crisp, distinct, exact, hair-line, intelligible, legible, neat, orotund, pellucid, precise, readable, sharp, sharp-cut, trenchant, unfussy2) Engineering: sharply defined (об изображении)3) Mathematics: precise4) Textile: distinct (о рисунке), pronounced, sharp (о рисунке)5) Jargon: snappy6) Information technology: explicit7) Business: well-defined8) Quality control: positive-acting9) Phraseological unit: bright-line rule (A clear-cut) -
85 вычурный
(42; рен; рна) verschnörkelt; geziert, schwülstig* * ** * *вы́чур| ный<-ная, -ное; -ен, -на, -но>прил komisch, seltsamвы́чурное выраже́ние (замыслова́тое) komischer Ausdruck mвы́чурный фасо́н пла́тья komisches Modell nt* * *adj1) gener. gedrechselt (напр., о манерах), gedrechselt (о речи, стиле), geschraubt, gesucht, manieriert, schnörkelhaft (о рисунке и т. п.), schnörkelig (о рисунке и т. п.), schwülstig, sich verstiegen, überladen, barock, verschnörkelt (напр. об орнаменте, о подписи)2) book. affektiert (о стиле)3) construct. gekünstelt4) psych. verstiegen5) wood. schnörklig -
86 перевестись
(1 ед. переведу́сь) сов.1) (в другой город, учреждение и т.п.) trasladarse2) разг. ( исчезнуть) acabarse, gastarse, agotarseу него́ де́ньги ещё не перевели́сь — aún le queda algún dinero
3) (о рисунке и т.п.) estar calcado* * *(1 ед. переведу́сь) сов.1) (в другой город, учреждение и т.п.) trasladarse2) разг. ( исчезнуть) acabarse, gastarse, agotarseу него́ де́ньги ещё не перевели́сь — aún le queda algún dinero
3) (о рисунке и т.п.) estar calcado* * *v1) gener. (в другой город, учреждение и т. п.) trasladarse, (î ðèñóñêå è á. ï.) estar calcado2) colloq. (èñ÷åçñóáü) acabarse, agotarse, gastarse -
87 перспектива
перспекти́вав разн. знач. perspektivo.* * *ж.хоро́шие перспекти́вы — buenas perspectivas
лине́йная перспекти́ва мат. — perspectiva lineal
с учётом перспекти́вы ( о рисунке) — en perspectiva
име́ть перспекти́ву на бу́дущее — tener perspectiva
* * *ж.хоро́шие перспекти́вы — buenas perspectivas
лине́йная перспекти́ва мат. — perspectiva lineal
с учётом перспекти́вы ( о рисунке) — en perspectiva
име́ть перспекти́ву на бу́дущее — tener perspectiva
* * *n1) gener. vista panorámica, (разн. знач.) perspectiva2) eng. vista panoràmica, perspectiva -
88 мазня
ж. разг.barbouillage m; griffonnage m ( о писании); croûte f ( о картине)* * *n1) gener. enseigne à bière (о картине), barbouillage, barbouillis2) colloq. gribouillage (о скверном почерке, рисунке), gribouillis (о скверном почерке, рисунке), peinturlurage, barbouille, croûte (о картине)3) liter. torchon -
89 рисунок
муж.1) drawing; design, pattern (узор); outline (очертание)рисунок пером — black and white, pen and ink
как видно из рисунка — as shown/indicated on/in the picture
3) (картинка, иллюстрация)picture, illustration4) drawing, draughtsmanship (противоположное к использованию красок)• -
90 сӱретысе
сӱретысекартинный, рисуночный; находящийся на картине, рисунке; связанный с картиной, рисункомСӱретысе пеледыш цветок на рисунке.
– Ленин! – рвезе сӱретысе еҥын лӱмжым йӱкынак каласыш. К. Васин. – Ленин! – вслух произнёс мальчик имя человека на картине.
-
91 программируемый логический контроллер
- speicherprogrammierbare Steuerung, f
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего. Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы. Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7. Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series. Рис. 4. Резервированный контроллер FCP270.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA). Рис. 5. Контроллер AC800M.
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-немецкий словарь нормативно-технической терминологии > программируемый логический контроллер
92 аварийный сигнал (в автоматизированных системах)
аварийный сигнал
аварийная сигнализация
Оповещение оператора о наступлении определенного события, связанного с нарушением или угрозой нарушения регламентного течения технологического процесса.
[ http://kazanets.narod.ru/AlarmsArchive.htm]Аварийные сигналы настраиваются путем задания предельных значений (границ, thresholds) индивидуально для каждой процессной переменной. Система автоматически отслеживает изменение процессной переменной и сопоставляет ее значение с заранее настроенными границами. В случае выхода переменной за нормальные границы система генерирует оповещение и фиксирует его в журнале аварийных сигналов. Рассмотрим наиболее часто используемые аварийные сигналы для аналоговых величин:
Lo – нижняя предупредительная граница. В случае если процессная переменная становится меньше Lo, генерируется предупредительное оповещение.
LoLo – нижняя аварийная граница. В случае если процессная переменная становится меньше LoLo, генерируется аварийный сигнал.
Hi - верхняя предупредительная граница. В случае если процессная переменная становится больше Hi, генерируется предупредительное оповещение.
HiHi – верхняя аварийная граница. В случае если процессная переменная становится больше HiHi, генерируется аварийный сигнал.
DEV_HI (DEVIATION_HI) – верхняя граница отклонения (рассогласования). Если разность (абсолютное значение) между двумя переменными становится больше DEV_HI, то генерируется аварийный сигнал. Например, такой сигнал можно настроить у блока PID; в этом случае система будет сигнализировать об отклонении регулируемой величины от уставки, превышающей границу DEV_HI. По аналогии можно настроить сигнал DEV_LO.
ROC_HI (RATE_OF_CHANGE_HI) – верхняя граница скорости изменения. Система отслеживает скорость изменения процессной переменной (первую производную). Если скорость возрастания переменной выше границы ROC_HI, то генерируется аварийный сигнал.
Для дискретных переменных сигналов гораздо меньше. По сути их всего две – аварийное состояние, соответствующее значению 1, или авария в случае значения 0.
На рис. 4 показана схема появления аварийных сигналов на примере быстро изменяющейся процессной переменной. Стоит отменить, что на рисунке изображены отнюдь не все генерируемые оповещения. Например, при возврате переменной обратно в нормальный диапазон значений, кроме изображенных на рисунке, генерируется оповещение RETURN_TO_NORMAL
Рис. 4. Пример генерации аварийных сигналов и оповещений.Важность (или критичность) аварийного сигнала определяется приоритетом (целое число). Как правило, чем выше приоритет у аварийного сигнала, тем критичнее она для производства, и тем быстрее на нее надо обратить внимание.
При появлении аварийного сигнала у оператора есть два варианта действий:
1. Игнорировать его. Не всегда хорошее решение, мягко говоря. При этом если процессная переменная вернется обратно в нормальные границы, то появиться новое оповещение UNACK_RETURN_TO_NORMAL, говорящее о том, что оператор проспал аварийное событие, но, к счастью, все нормализовалось.
2. Подтвердить, что сигнал замечен оператором ( acknowledge). Дело в том, что сразу после появления аварийного сигнала ему автоматически присваивается статус UNACK (не подтвержден). Как только сигнал подтверждают (иногда говорят “квитируют”), его статус становится ACK (подтвержден). В этом случае возврат переменной в нормальные границы ведет к появлению оповещения ACK_RETURN_TO_NORMAL, свидетельствующее о том, что оператор “держит ухо востро”.
Аварийные сигналы можно произвольно группировать. На практике группировка проводится путем распределения процессных переменных, а следовательно, и соответствующих им аварийных сигналов по различным технологическим участкам ( plant areas) и установкам ( plant units).
[ http://kazanets.narod.ru/AlarmsArchive.htm]Тематики
Синонимы
EN
Русско-английский словарь нормативно-технической терминологии > аварийный сигнал (в автоматизированных системах)
93 передача файла
передача файла
—
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]
передача файла
Определяет обмен крупными блоками данных, например программами. На рисунке 3 показано общее представление концептуальной модели сервиса ACSI.
[ ГОСТ Р МЭК 61850-7-2-2009]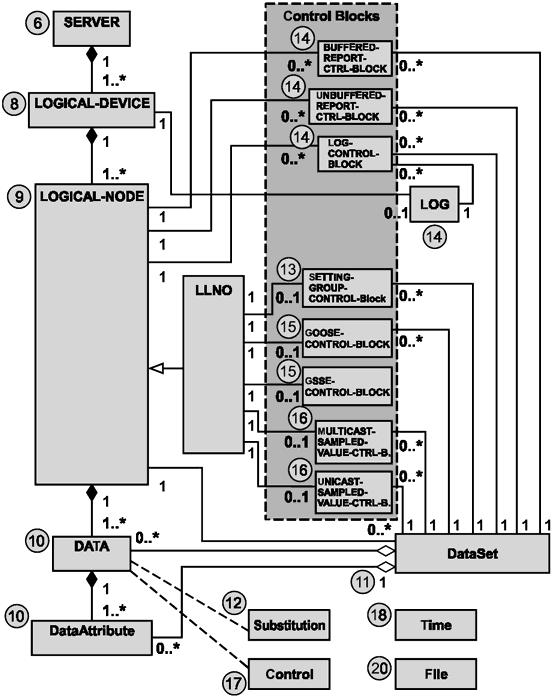 Control Blocks
Control BlocksБлоки управления
SERVERСервер
BUFFERED-REPORT-CTRL-BLOCKБлок управления буферизованным отчетом
UNBUFFERED-REPORT-CTRL-BLOCKБлок управления небуферизованным отчетом
LOGICAL-DEVICEЛогическое устройство
LOG-CONTROL-BLOCKБлок управления регистрацией
LOGICAL-NODEЛогический узел
LOGЖурнал
SETTING-GROUP-CONTROL-BlockБлок управления группой настроек
LLN0Нулевой логический узел
GOOSE-CONTROL-BLOCKБлок управления GOOSE
GSSE-CONTROL-BLOCKБлок управления GSSE
MULTICAST-SAMPLED-VALUE-CTRL-B.Блок управления многоадресным выборочным значением
UNICAST-SAMPLED-VALUE-CTRL-B.Блок управления одноадресным выборочным значением
DATAДанные
DataSetНабор данных
SubstitutionПодстановка
Time
Время
DataAttribute
Атрибут данных
Control
Управление
File
Файл
Рисунок 3 - Концептуальная модель сервиса ACSIПримечание 1 - Цифры указывают соответствующие разделы настоящего стандарта.
Примечание 2 - Диаграммы классов являются концептуальными. Подробное описание приведено в соответствующих разделах. Диаграммы в полном объеме представлены в МЭК 61850-7-1. Класс данных DATA может быть определен рекурсивно. Операции по подстановке и управлению ограничены нижним уровнем в классе данных DATA. Атрибуты данных DataAttributes могут также быть определены рекурсивно.
Рисунок 3 - Концептуальная модель сервиса ACSIЛогический узел является одним из основных компоновочных блоков, имеющих ассоциации с большинством остальных моделей информационного обмена, например с управлением генерацией отчетов, управлением регистрацией и управлением настройками.
Любая другая модель сервиса обмена информацией, например управление генерацией отчетов, управление регистрацией и управление настройками, должна наследовать имя объекта ( ObjectName) и ссылку объекта ( ObjectReference), как это показано на рисунке 2.
Примечание 3 - Модели классов и сервисы определяют с использованием объектно-ориентированного подхода, позволяющего выполнять отображение моделей классов и сервисов на различные решения уровня приложения и межплатформенного программного обеспечения (ПО).Тематики
- релейная защита
- электросвязь, основные понятия
EN
Русско-английский словарь нормативно-технической терминологии > передача файла
94 подрисуночная надпись
подрисуночная надпись
надпись на рисунке
заголовок
титр
субтитр
—
[Л.Г.Суменко. Англо-русский словарь по информационным технологиям. М.: ГП ЦНИИС, 2003.]Тематики
Синонимы
EN
Русско-английский словарь нормативно-технической терминологии > подрисуночная надпись
95 программируемая электронная система
программируемая электронная система
Система для управления, защиты или мониторинга, основанная на использовании одного или нескольких программируемых электронных устройств, включая все элементы системы, такие как источники питания, датчики и другие устройства ввода, магистрали данных и другие каналы связи, устройства привода и другие устройства вывода (см. рисунок).
Примечание
Структура PES показана на рисунке а. Рисунок b демонстрирует способ представления PES, применяемый в настоящем стандарте, когда программируемая электроника показывается отдельно от датчиков и устройств привода EUC и их интерфейсов, но при этом программируемая электроника может присутствовать в нескольких местах PES. Рисунок c показывает PES с двумя отдельными блоками программируемой электроники. Рисунок d показывает PES с дублированием программируемой электроники (т. е. двухканальную), но с одним датчиком и одним устройством привода.
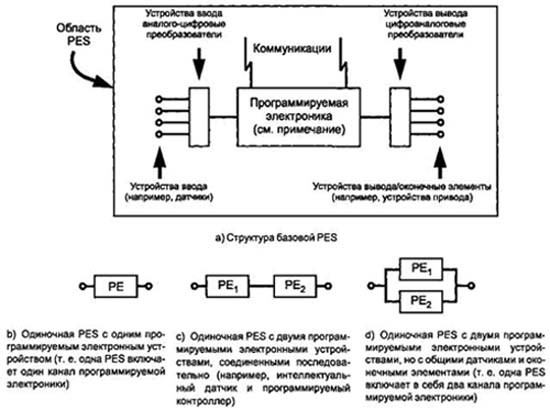
Примечание
Программируемая электроника показана в центре, но она может присутствовать в нескольких местах PES.
[ ГОСТ Р МЭК 61508-4-2007]Тематики
EN
3.33 программируемая электронная система (programmable electronic system; PES): Система, предназначенная для управления, защиты или мониторинга, содержащая одно или несколько программируемых электронных устройств, включая все элементы системы, такие как источники питания, сенсоры и устройства ввода, каналы передачи данных и коммуникационные магистрали, приводы и оконечные устройства.
Источник: ГОСТ Р 53195.1-2008: Безопасность функциональная связанных с безопасностью зданий и сооружений систем. Часть 1. Основные положения оригинал документа
3.3.2 программируемая электронная система (programmable electronic system); (PES): Система для управления, защиты или мониторинга, основанная на использовании одного или нескольких программируемых электронных устройств, включая все элементы системы, такие как источники питания, датчики и другие устройства ввода, магистрали данных и другие каналы связи, устройства привода и другие устройства вывода (см. рисунок 2).
Примечание - Структура PES показана на рисунке 2а). Рисунок 2b) демонстрирует способ представления PES, применяемый в настоящем стандарте, когда программируемая электроника показывается отдельно от датчиков и устройств привода EUC и их интерфейсов, но при этом программируемая электроника может присутствовать в нескольких местах PES. Рисунок 2с) показывает PES с двумя отдельными блоками программируемой электроники. Рисунок 2d) показывает PES с дублированием программируемой электроники (т.е. двухканальную), но с одним датчиком и одним устройством привода.
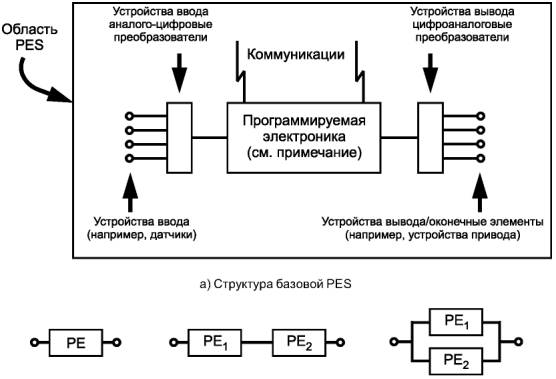
b) Одиночная PES с одним программируемым электронным устройством (т.е. одна PES включает один канал программируемой электроники)
с) Одиночная PES с двумя программируемыми электронными устройствами, соединенными последовательно (например, интеллектуальный датчик и программируемый контроллер)
d) Одиночная PES с двумя программируемыми электронными устройствами, но с общими датчиками и оконечными элементами (т.е. одна PES включает в себя два канала программируемой электроники)
Примечание - Программируемая электроника показана в центре, но она может присутствовать в нескольких местах PES.
Рисунок 2 - Программируемая электронная система (PES): структура и терминология
Источник: ГОСТ Р МЭК 61508-4-2007: Функциональная безопасность систем электрических, электронных, программируемых электронных, связанных с безопасностью. Часть 4. Термины и определения оригинал документа
Русско-английский словарь нормативно-технической терминологии > программируемая электронная система
96 программируемый логический контроллер
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-английский словарь нормативно-технической терминологии > программируемый логический контроллер
97 разрастание печатного проводника
разрастание печатного проводника
Увеличение ширины проводника на печатной плате по отношению к его ширине на фотошаблоне или на рисунке, образованном резистивным покрытием.
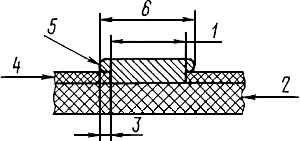
1 - ширина проводника по рабочему фотошаблону; 2 - материал основания; 3 - разрастание; 4 - резистивное покрытие; 5 - осаждение металла; 6 - ширина проводника
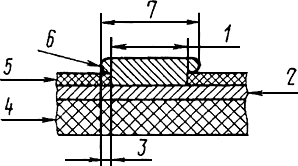
1 - ширина проводника по рабочему фотошаблону; 2 - металлическая фольга; 3 - разрастание; 4 - материал основания; 5 - резистивное покрытие; 6 - осаждение металла; 7 - ширина проводника.
[ ГОСТ 20406-75]
разрастание печатного проводника
Увеличение ширины печатного проводника печатной платы по отношению к его ширине на фотошаблоне, образованное металлическим защитным покрытием.
[ ГОСТ Р 53386-2009]Тематики
EN
FR
27. Разрастание печатного проводника
E. Outgrowth
F. Excroissauge
Увеличение ширины проводника на печатной плате по отношению к его ширине на фотошаблоне или на рисунке, образованном резистивным покрытием (см. справочное приложение 2, черт. 2 и 3)
Источник: ГОСТ 20406-75: Платы печатные. Термины и определения оригинал документа
Русско-английский словарь нормативно-технической терминологии > разрастание печатного проводника
98 сбой
сбой
Самоустраняющийся отказ или однократный отказ, устраняемый незначительным вмешательством оператора.
[ ГОСТ 27.002-89]
[ОСТ 45.153-99]
[СТО Газпром РД 2.5-141-2005]
сбой
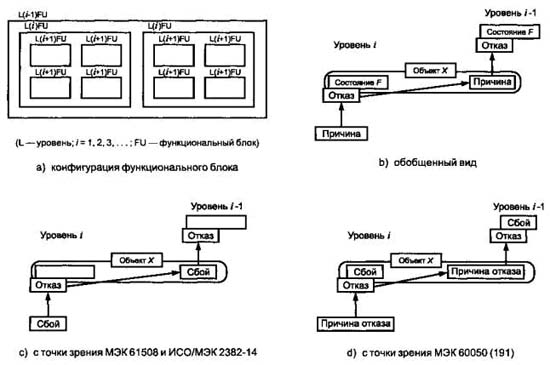
Ненормальный режим, который может вызвать уменьшение или потерю способности функционального блока выполнять требуемую функцию.
Примечание
МЭС 191-05-01 определяет «сбой» как состояние, характеризуемое неспособностью выполнить необходимую функцию, исключая неспособности, возникающие во время профилактического ухода или других плановых мероприятий, либо в результате недостатка внешних ресурсов. Иллюстрация к этим двум точкам зрения показана на рисунке [ ИСО / МЭК 2382-14-01-10].
[ ГОСТ Р МЭК 61508-4-2007]Тематики
- газораспределение
- надежность средств электросвязи
- надежность, основные понятия
Обобщающие термины
EN
3.13. Сбой
Interruption
Самоустраняющийся отказ или однократный отказ, устраняемый незначительным вмешательством оператора
Источник: ГОСТ 27.002-89: Надежность в технике. Основные понятия. Термины и определения оригинал документа
3.6.1 сбой (fault): Ненормальный режим, который может вызвать уменьшение или потерю способности функционального блока выполнять требуемую функцию.
Примечание - МЭС 191-05-01 определяет «сбой» как состояние, характеризуемое неспособностью выполнить необходимую функцию, исключая неспособности, возникающие во время профилактического ухода или других плановых мероприятий, либо в результате недостатка внешних ресурсов. Иллюстрация к этим двум точкам зрения показана на рисунке 4 [ИСО/МЭК 2382-14-01-10].
Источник: ГОСТ Р МЭК 61508-4-2007: Функциональная безопасность систем электрических, электронных, программируемых электронных, связанных с безопасностью. Часть 4. Термины и определения оригинал документа
Русско-английский словарь нормативно-технической терминологии > сбой
99 зона считывания
3.12 зона считывания (reading zone): Вся область (одиночная линия, площадь или объем), находящаяся перед выходным окном бесконтактного сканера, в которой могут быть считаны определенные символы.
Примечание - См. зону MNOP на рисунке 2.
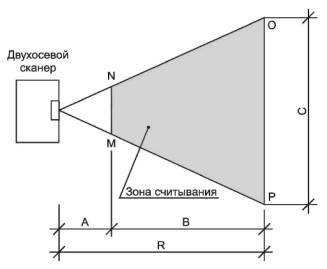
Рисунок 2 - Пример зоны считывания (зона MNOP)
Примечание - Конкретные требования по применению, например, автоматических конвейерных систем сканирования, могут ограничивать реальную зону считывания, как показано на рисунке 3 (зона MNOP).
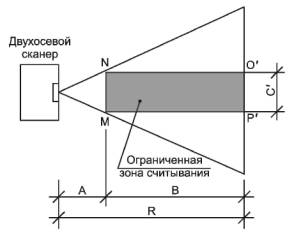
Рисунок 3 - Пример ограниченной зоны считывания (зона MNOP)
Источник: ГОСТ Р ИСО/МЭК 15423-2005: Автоматическая идентификация. Кодирование штриховое. Общие требования к испытаниям сканеров и декодеров штрихового кода оригинал документа
Русско-английский словарь нормативно-технической терминологии > зона считывания
100 ползучесть при сжатии
3.5 ползучесть при сжатии (compressive creep) Xct: Нарастание деформации образца при постоянной сжимающей нагрузке в зависимости от времени при заданной температуре и влажности:
Xct = Xt- X0
где Xt - деформация образца в момент времени f, мм;
Х0 - начальная деформация образца (через 60 с после начала приложения нагрузки), мм.
Толщины и соответствующие им деформации образца показаны на рисунке 1.
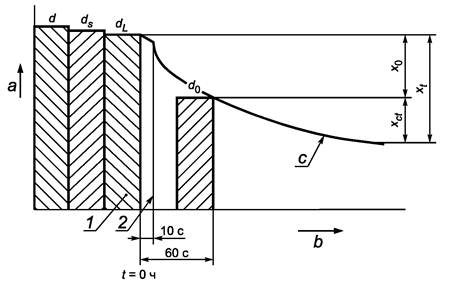
а - толщина d; b - время t; с - кривая деформации; 1 - толщина образца под нагрузкой, создаваемой «собственным весом»
Рисунок 1 - Толщины и соответствующие деформации
3.5 ползучесть при сжатии (compressive creep) Хсt: Нарастание деформации образца при постоянной сжимающей нагрузке в зависимости от времени при заданной температуре и влажности:
Xct = Xt - X0,
где Xt - деформация образца в момент времени t, мм;
Х0 - начальная деформация образца (через 60 с после начала приложения нагрузки), мм.
Толщины и соответствующие им деформации образца показаны на рисунке 1.
Русско-английский словарь нормативно-технической терминологии > ползучесть при сжатии
СтраницыСм. также в других словарях:
запечатлевавший в рисунке — прил., кол во синонимов: 2 • делавший рисунок (2) • зарисовывавший (11) Словарь синонимов ASIS. В.Н. Тришин. 2013 … Словарь синонимов
данные, представленные на рисунке или схеме — — [А.С.Гольдберг. Англо русский энергетический словарь. 2006 г.] Тематики энергетика в целом EN figure portrayed data … Справочник технического переводчика
полумостики в рисунке (протектора) — Местные уменьшения глубины канавки. [ГОСТ 22374 77] Тематики шины пневматические Обобщающие термины элементы покрышки пневматической шины EN tie bar (tyre) DE Grunderhebung FR pont de gomme … Справочник технического переводчика
раковина в проводящем рисунке печатной платы — … Справочник технического переводчика
раковина в проводящем рисунке печатной платы — 84 раковина в проводящем рисунке печатной платы: Дефект на участке проводящего рисунка в виде углубления, уменьшающего толщину проводникового материала. Источник: ГОСТ Р 53386 2009: Платы печатные. Термины и определения оригинал документа … Словарь-справочник терминов нормативно-технической документации
Теория волн Эллиотта — (Elliott Wave Theory) Теория волн Эллиотта это математическая теория об изменении поведения общества или финансовых рынков Все о волновой теории Эллиотта: видео, книги, статьи о теории волн, информация о советниках и индикаторах волн Эллиотта… … Энциклопедия инвестора
зажим — 3.3 зажим (terminal): Проводящая часть одного полюса, состоящая из одного или более зажимного устройства и изолированная, если необходимо. Источник … Словарь-справочник терминов нормативно-технической документации
SVN — Subversion Логотип Subversion Тип система управления версиями Разработчик CollabNet, Inc. Написана на C … Википедия
SubVersion — Логотип Subversion Тип система управления версиями Разработчик CollabNet, Inc. Написана на C … Википедия
Svn — Subversion Логотип Subversion Тип система управления версиями Разработчик CollabNet, Inc. Написана на C … Википедия
контактный — 2.3.3.10 контактный узел: Элемент или комбинация контактных элементов, которые могут быть объединены с подобными элементами, приводимыми в действие общим механизмом передачи. Источник … Словарь-справочник терминов нормативно-технической документации
 18+© Академик, 2000-2024
18+© Академик, 2000-2024- Обратная связь: Техподдержка, Реклама на сайте
Экспорт словарей на сайты, сделанные на PHP, Joomla, Drupal, WordPress, MODx.