-
21 character
1. буква; знак; литера; символ; цифра; иероглифswitch character — символ переключения; переключающий символ
coded character — закодированный знак; закодированный символ
affirmative character — знак подтверждения приема; квитанция
2. очко3. шрифт4. алфавитcharacter per pica — количество знаков в цицеро, коэффициент гарнитурокегля шрифта
character set — набор знаков; алфавит
alphabetic character — буквенный знак; знак алфавита
5. дополнительный наборный знак6. дополнительное шрифтовое очкоbattered character — корректурное указание «сбитый шрифт»
bottle-arched character — литера, у которой нижняя часть шире, чем верхняя
bottle-necked character — литера, у которой верхняя часть шире, чем нижняя
condensed character — узкая буква; узкий знак
7. знак выделительного шрифта8. выделительный шрифтa book in Gothic character — книга, напечатанная готическим шрифтом
9. знак на дисплее10. знак точки11. точечный знакexpanded character — широкая буква; широкий знак
first-order character — базовая буква; базовый знак
interlock character — уменьшенный знак, введённый в межбуквенный просвет другого знака
master character — базовая буква, базовый знак
12. матричный знакerror character — ошибочный знак; знак ошибки
13. очко матрицыscreened character — «растрированный» знак
second-order character — знак второго порядка; индекс
stagger characters — буквы, набранные на несколько линий шрифта
dot matrix character printing — печатание знаков, формируемых точечной матрицей
-
22 server
блок обслуживания
Та часть системы массового обслуживания, в которую поступает поток требований (заявок); может состоять из одного или нескольких «приборов», «каналов«, под которыми понимаются устройства или люди, осуществляющие акт обслуживания. В первом случае Б.о. называется одноканальным, во втором – многоканальным. Блок, где заявка обслуживается только одним «прибором», после чего покидает систему, называется однофазным; Б., в котором каждая заявка последовательно проходит несколько «приборов» – многофазным.
[ http://slovar-lopatnikov.ru/]Тематики
EN
сервер
Функциональное устройство, предоставляющее услуги рабочим станциям, персональным компьютерам или другим функциональным устройствам.
[РД 01.120.00-КТН-228-06]
сервер
Компьютер или приложение, предоставляющие услуги, ресурсы или данные клиентскому приложению или компьютеру.
[ http://www.morepc.ru/dict/]Основы клиент-серверных технологий
Сейчас мы хотим уточнить, что же такое сервер, какие функции он выполняет и какие вообще бывают серверы. Если речь идет о сервере, невольно всплывает в памяти понятие клиента. Все потому, что эти два понятия неразрывно связаны. Объединяет их компьютерная архитектура клиент-сервер. Обычно, когда говорят «сервер», имеют в виду сервер в архитектуре клиент-сервер, а когда говорят «клиент» – имеют в виду клиент в этой же архитектуре. Так что же это за архитектура? Суть ее в том, чтобы разделить функции между двумя подсистемами: клиентом, который отправляет запрос на выполнение каких-либо действий, и сервером, который выполняет этот запрос. Взаимодействие между клиентом и сервером происходит посредством стандартных специальных протоколов, таких как TCP/IP и z39.50. На самом деле протоколов очень много, они различаются по уровням. Мы рассмотрим только протокол прикладного уровня HTTP (чуть позднее), поскольку для решения наших программистских задач нужен только он. А пока вернемся к клиент-серверной архитектуре и разберемся, что же такое клиент и что такое сервер.
Сервер представляет собой набор программ, которые контролируют выполнение различных процессов. Соответственно, этот набор программ установлен на каком-то компьютере. Часто компьютер, на котором установлен сервер, и называют сервером. Основная функция компьютера-сервера – по запросу клиента запустить какой-либо определенный процесс и отправить клиенту результаты его работы.
Клиентом называют любой процесс, который пользуется услугами сервера. Клиентом может быть как пользователь, так и программа. Основная задача клиента – выполнение приложения и осуществление связи с сервером, когда этого требует приложение. То есть клиент должен предоставлять пользователю интерфейс для работы с приложением, реализовывать логику его работы и при необходимости отправлять задания серверу.
Взаимодействие между клиентом и сервером начинается по инициативе клиента. Клиент запрашивает вид обслуживания, устанавливает сеанс, получает нужные ему результаты и сообщает об окончании работы.
Услугами одного сервера чаще всего пользуется несколько клиентов одновременно. Поэтому каждый сервер должен иметь достаточно большую производительность и обеспечивать безопасность данных.
Логичнее всего устанавливать сервер на компьютере, входящем в какую-либо сеть, локальную или глобальную. Однако можно устанавливать сервер и на отдельно стоящий компьютер (тогда он будет являться одновременно и клиентом и сервером).[ Источник]
Существует множество типов серверов. Вот лишь некоторые из них.- Видеосервер. Такой сервер специально приспособлен к обработке изображений, хранению видеоматериалов, видеоигр и т.п. В связи с этим компьютер, на котором установлен видеосервер, должен иметь высокую производительность и большую память.
- Поисковый сервер предназначен для поиска информации в Internet.
- Почтовый сервер предоставляет услуги в ответ на запросы, присланные по электронной почте.
- Сервер WWW предназначен для работы в Internet.
- Сервер баз данных выполняет обработку запросов к базам данных.
- Сервер защиты данных предназначен для обеспечения безопасности данных (содержит, например, средства для идентификации паролей).
- Сервер приложений предназначен для выполнения прикладных процессов. С одной стороны взаимодействует с клиентами, получая задания, а с другой – работает с базами данных, подбирая необходимые для обработки данные.
- Сервер удаленного доступа обеспечивает коллективный удаленный доступ к данным.
- Файловый сервер обеспечивает функционирование распределенных ресурсов, предоставляет услуги поиска, хранения, архивирования данных и возможность одновременного доступа к ним нескольких пользователей.
Обычно на компьютере-сервере работает сразу несколько программ-серверов. Одна занимается электронной почтой, другая распределением файлов, третья предоставляет web-страницы.
Тематики
EN
сервер (сети и системы связи)
Функциональный узел в сети связи, который предоставляет данные другим функциональным узлам или выдает разрешение на доступ к своим ресурсам другим функциональным узлам, который может быть также логическим подразделом с независимым управлением своей оперативной деятельностью в пределах программного алгоритма и/или оборудования.
[ ГОСТ Р 54325-2011 (IEC/TS 61850-2:2003)]EN
server
on a communication network, a functional node that provides data to, or that allows access to its resources by, other functional nodes. A server may also be a logical subdivision, which has independent control of its operation, within the software algorithm (and/or possibly hardware) structure
[IEC 61850-2, ed. 1.0 (2003-08)]Тематики
EN
телевизионный сервер
Устройство, предназначенное для записи и воспроизведения цифровых телевизионных видеосигналов и звуковых сигналов вещательного телевидения на магнитные диски.
[ ГОСТ Р 52210-2004]Тематики
- телевидение, радиовещание, видео
Обобщающие термины
EN
2.60 сервер (server): Процессор, предоставляющий услуги одному или более другому процессору.
Источник: ГОСТ Р ИСО/МЭК ТО 10032-2007: Эталонная модель управления данными
3.66 сервер (server): Компьютер, действующий как поставщик некоторых услуг, таких как обработка коммуникаций, обеспечение интерфейса с системой хранения файлов или печатное устройство.
Источник: ГОСТ Р ИСО/ТО 13569-2007: Финансовые услуги. Рекомендации по информационной безопасности
3.66 сервер (server): Компьютер, действующий как поставщик некоторых услуг, таких как обработка коммуникаций, обеспечение интерфейса с системой хранения файлов или печатное устройство.
Источник: ГОСТ Р ИСО ТО 13569-2007: Финансовые услуги. Рекомендации по информационной безопасности
3.1.29 сервер (server): Программный объект, экспортирующий ресурс имеющихся данных. Программный объект устанавливается на физическое устройство. Компьютер, подключенный к сети и предоставляющий услуги другим устройствам, работающим в этой сети.
Источник: ГОСТ Р 53531-2009: Телевидение вещательное цифровое. Требования к защите информации от несанкционированного доступа в сетях кабельного и наземного телевизионного вещания. Основные параметры. Технические требования оригинал документа
Англо-русский словарь нормативно-технической терминологии > server
-
23 evolutionary prototype
1) Общая лексика: эволюционирующий прототип (полностью функциональный опытный образец, созданный как остов (основа) или начальный вариант конечного продукта, обрастающий деталями и расширяющийся инкрементно, по мере того как набор требований уто)2) Программирование: эволюционный прототипУниверсальный англо-русский словарь > evolutionary prototype
-
24 operational profile
1) Техника: многофункциональный разрез (данные тестирования, отражающие реальные условия выполнения программы)2) Вычислительная техника: функциональный разрез (набор тестовых данных, отражающих реальные условия функционирования программы)3) Авиационная медицина: операциональный профиль -
25 function
I = FUNC1) функцияв программировании - специальный вид подпрограмм, выполняющих некоторое вычисление и отличающихся тем, что они возвращают в точку вызова результат (return value), присваиваемый имени функции. Поэтому функции, как правило, используются в выражениях. Функция состоит из четырёх частей: типа возвращаемого результата (return type) (он же тип функции), имени функции (function name), списка параметров (parameter list) и тела функции (function body). Функции бывают встроенные (predefined function), библиотечные (library function) и пользовательские (custom function).The chief advantage of a function is that it can be treated as a "black box" that takes a set of known inputs and produces a corresponding output. — Главное преимущество функции в том, что она может рассматриваться как чёрный ящик, принимающий набор известных входных данных и выдающий соответствующий им результат.
Syn:см. тж. built-in function, expression, function body, function call, function declaration, function definition, function editor, function header, function name, function overloading, function procedure, function prototype, function reference, function scope, function signature, function template, in-line function, intrinsic function, logical function, mathematical function, member function, objective function, one-way function, polymorphic function, primitive, procedure, pseudorandom function, recursive function, routine, standard function, string function, subroutine, system function, threshold function, undocumented function, value function, variadic function, virtual function, voidнапример, программы и/или устройствасм. тж. feature3) (см. тж. function unit) - функциональный блок (модуль, узел, элемент, компонент)аппаратный, программный или аппаратно-программный блок, составная часть более крупной системысм. тж. analog function4) функционирование, работоспособность5) [функциональная] зависимость6) глаг. функционировать, действовать, работать
II = library routineАнгло-русский толковый словарь терминов и сокращений по ВТ, Интернету и программированию. > function
-
26 vector processor
компьютер, имеющий наряду с обычным набором скалярных команд набор команд для одновременных вычислений над одномерными массивами цифровых данных (векторов). Различие между векторным процессором и матричным в том, что, хотя они и решают похожие задачи, в векторном процессоре вектор целиком передаётся в специальный функциональный блок (vector unit), тогда как в матричном процессоре каждый элемент вектора посылается в отдельное арифметическое устройство. В качестве примеров первых компьютеров с векторным процессором можно назвать Illiac-IV, Cray-1 и Cray-2, а из более современных - NEC SX/5, Fujitsu VPP5000 и Hitachi S-8300. Существует два основных типа векторных процессоров. В первом их них (vector-register processor) все операции над векторами (кроме загрузки и записи) производятся в векторных регистрах (см. vector register), а во втором (memory-memory vector processor) - все операции над векторами осуществляются в ОЗУ. Векторные процессоры эффективны при решении больших научных и инженерных задач.Syn:Англо-русский толковый словарь терминов и сокращений по ВТ, Интернету и программированию. > vector processor
-
27 evolutionary prototype
полностью функциональный опытный образец, созданный как остов (основа) или начальный вариант конечного продукта, обрастающий плотью и расширяющийся инкрементно, по мере того как набор требований уточняется и оказывается готовым для реализациисм. тж. prototypeАнгло-русский толковый словарь терминов и сокращений по ВТ, Интернету и программированию. > evolutionary prototype
-
28 diploid
diploid диплоид; диплоидный, с двойным числом хромосомdiploid диплоид, организм, имеющий двойной набор хромосом и развившийся из зиготы, образованной в результате слияния гаплоидных женских и мужских гаметdouble diploid аутотетраплоид; двойной диплоидfunctional diploid функциональный диплоид (аллополиплоид, ведущий себя при расщеплении как диплоид)multiple diploid аллополиплоидpartial diploid частичный диплоидEnglish-Russian dictionary of biology and biotechnology > diploid
-
29 plc
- связь по ЛЭП
- программируемый логический контроллер
- несущая в канале ВЧ-связи по ЛЭП
- маскирование потери пакета
- контроллер с программируемой логикой
- акционерная компания с ограниченной ответственностью
акционерная компания с ограниченной ответственностью
AG - аббревиатура для обозначения AKTIENGESELLSCHAFT (акционерное общество). Оно пишется после названия немецких, австрийских или швейцарских компаний и является эквивалентом английской аббревиатуры plc (public limited company-акционерная компания с ограниченной ответственностью). Сравни: GmbH.
[ http://www.vocable.ru/dictionary/533/symbol/97]Тематики
EN
DE
- AG
контроллер с программируемой логикой
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
маскирование потери пакета
Метод сокрытия факта потери медиапакетов путем генерирования синтезируемых пакетов (МСЭ-T G.1050).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
несущая в канале ВЧ-связи по ЛЭП
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999]Тематики
- электротехника, основные понятия
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего. Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы. Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7. Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series. Рис. 4. Резервированный контроллер FCP270.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA). Рис. 5. Контроллер AC800M.
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
связь по ЛЭП
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
Англо-русский словарь нормативно-технической терминологии > plc
30 virtual machine
виртуальная машина
виртуальный компьютер
Виртуальный компьютер, работа которого реализуется на реальной машине с помощью специальных программных средств виртуализации.
Если не вдаваться в детали, то компьютерные системы обычно состоят из аппаратного обеспечения, операционной системы, которая работает на этом аппаратном обеспечении, и приложений, работающих в этой ОС. (Правда, во встроенных системах операционная система в традиционном понимании может отсутствовать.) Так или иначе, операционная система "знает" обо всех ресурсах и возможностях используемого оборудования и управляет им напрямую.
Если между ОС и вычислительной системой присутствует еще один программный уровень, тогда ОС получает только ту информацию, которую этот промежуточный уровень ей предоставляет. И сведения о ресурсах и возможностях используемого аппаратного обеспечения будут зависеть от этого промежуточного программного уровня. Операционная система может контролировать нижележащее оборудование только в той мере, в какой ему позволяет этот промежуточный уровень.
Промежуточный программный уровень может сообщить ОС все, что ему известно об аппаратном обеспечении, и просто передавать управляющие директивы без каких-либо изменений. Но возможно и иное решение: промежуточный уровень может не сообщать ОС все данные об имеющемся оборудовании и до определенной степени менять управляющие директивы, передаваемые ОС.
Конечно, существуют разнообразные устройства и интерфейсы, которые добавляют свои нюансы и сложности в вычислительную среду. Но использование программного уровня для формирования набора вычислительных ресурсов и правил работы и составляют основу так называемой виртуальной машины.
Виртуальная машина — это вычислительная среда, набор ресурсов и правил работы которой формируется (с помощью программного обеспечения) в некой другой вычислительной среде.
[ http://www.morepc.ru/dict/]Тематики
Синонимы
EN
виртуальная машина (ЭВМ)
Средство многозадачной ОС, предоставляющее каждой задаче функциональный эквивалент ЭВМ.
[Е.С.Алексеев, А.А.Мячев. Англо-русский толковый словарь по системотехнике ЭВМ. Москва 1993]Тематики
EN
виртуальный компьютер
Программное обеспечение, которое моделирует центральный процессор гипотетического компьютера. Программы, выполняемые виртуальным компьютером, представляются в байтовых кодах, которые являются элементарными операциями для данного гипотетического компьютера. (МСЭ-Т Q.1741).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
Англо-русский словарь нормативно-технической терминологии > virtual machine
31 structure
здание
Наземное сооружение с помещениями для проживания, деятельности людей, хранения сырья или продукции или содержания животных.
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]
здание
Наземное строительное сооружение с помещениями для проживания и (или) деятельности людей, размещения производств, хранения продукции или содержания животных
[ ГОСТ Р 52086-2003]
здание
Строительная система, состоящая из несущих и ограждающих или совмещенных несущих и ограждающих конструкций, образующих наземный замкнутый объем, предназначенный для проживания или пребывания людей в зависимости от функционального назначения и для выполнения различного вида производственных процессов.
[РД 01.120.00-КТН-228-06]
здание
Покрытая крышей конструкция со стенами, в которой энергия применяется для создания определенных условий внутри помещения. В качестве здания может рассматриваться здание целиком или его часть, спроектированная или перестроенная для отдельной эксплуатации.
[ДИРЕКТИВА 2002/91/ЕС ЕВРОПЕЙСКОГО ПАРЛАМЕТА И СОВЕТА от 16 декабря 2002 г. по энергетическим характеристикам зданий]
здание
Результат строительства, представляющий собой объемную строительную систему, имеющую надземную и (или) подземную части, включающую в себя помещения, сети инженерно-технического обеспечения и системы инженерно-технического обеспечения и предназначенную для проживания и (или) деятельности людей, размещения производства, хранения продукции или содержания животных.
[Технический регламент о безопасности зданий и сооружений]
здание
Результат строительства, представляющий собой объемную строительную систему, имеющую надземную и (или) подземную части, включающую в себя помещения, сети и системы инженерно-технического обеспечения и предназначенную для проживания и (или) деятельности людей, размещения производства, хранения продукции или содержания животных [4].
Примечание - Данное определение может относиться к зданию в целом или к отдельным частям здания, которые могут использоваться отдельно.
[ ГОСТ Р 54860-2011]- Промышленные здания
-
Общественные здания
-
учреждения и организации управления, финансирования, кредитования, госстраха, просвещения, дошкольные;
- библиотеки, архивы;
- предприятия торговли, общепита, бытового обслуживания населения;
- гостиницы;
- лечебные учреждения;
- музеи;
- зрелищные предприятия и спортивные сооружения
-
учреждения и организации управления, финансирования, кредитования, госстраха, просвещения, дошкольные;
- Жилые здания
Части здания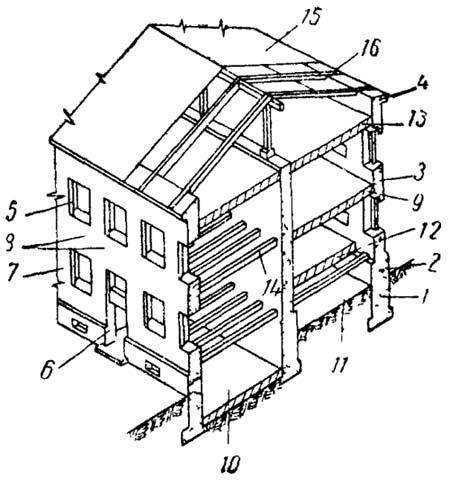
1 - фундамент;
2 - цоколь;
3 - поле стены (лицевая поверхность стены);
4 - карниз;
5 - оконный проем;
6 - дверной проем;
7 - простенок;
8 - перемычка (часть стены, перекрывающая оконные или дверные проемы);
9 - междуэтажное перекрытие;
10 - подвал;
11 - подполье;
12 - нижнее перекрытие;
13 - чердачное перекрытие;
14 - балки;
15 - кровля;
16 - стропила;
(15+16) - крыша[Грингауз Ф.И. Слесарь-жестянщик по промышленной вентиляции. Госстройиздат, 1959. 264 стр.]
Тематики
- здания, сооружения, помещения
- магистральный нефтепроводный транспорт
- опалубка
- теплоснабжение зданий
- энергосбережение
EN
DE
FR
каркас
Каркас представляет собой часть корпуса НКУ, к которой крепят элементы оболочки (панели, крышку, дверь (или двери).
Несущая часть панели ВРУ, на которой крепятся аппараты функциональных блоков, а также элементы оболочки и внутренние защитные ограждения.
[ ГОСТ Р 51732-2001]
каркас НКУ
-
[Интент]
Каркас может быть:- сборный;
- частично сварной;
- полностью сварной.
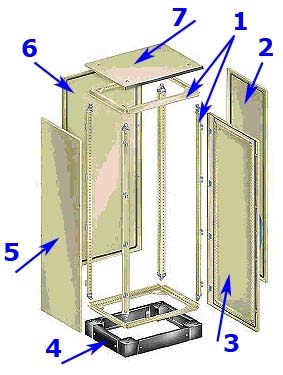
Корпус шкафа со сборным каркасом
-
элементы объемного сборного каркаса;
сборный каркас - боковая панель (правая панель);
- дверь;
- цоколь;
- боковая панель (левая панель);
- задняя панель;
-
крышка;
верхняя панель
Параллельные тексты EN-RU
Switchgear frame
The PC3.0/MNS R frame is based on modular 2 mm thick steel C sections, pre-drilled at a pitch of 25 mm DIN.
Each unit is based on modular elements and consists of:
• circuit-breaker compartments;
• instrument compartments;
• busbar compartment;
• cable compartment.
All compartments are mechanically segregated from the others.
[ABB]Каркас НКУ
Каркас PC3.0/MNS R изготовлен из модульного усиленного стального С-образного DIN-профиля толщиной 2 мм с отверстиями, расположенными с шагом 25 мм.
Каждый функциональный блок является модульным и включает в себя:
• отсеки автоматических выключателей;
• отсеки средств контроля, управления и защиты;
• отсек шин;
• кабельный отсек.
Все отсеки разделены перегородками или ограждениями друг от друга.
[Перевод Интент]Тематики
- НКУ (шкафы, пульты,...)
Синонимы
EN
FR
каркас стационарного котла
каркас
Ндп. котельный каркас
Несущая металлическая конструкция, воспринимающая нагрузку от массы стационарного котла, с учетом временных и особых нагрузок и обеспечивающая требуемое взаимное расположение элементов котла.
[ ГОСТ 23172-78]Недопустимые, нерекомендуемые
Тематики
- котел, водонагреватель
Синонимы
EN
DE
FR
конструкция
Устройство, взаимное расположение частей и состав машины, механизма или сооружения.
[ http://sl3d.ru/o-slovare.html]Параллельные тексты EN-RU
The new valve profile is design to ensure smooth and precise control at low capacities for improved part load performances.
[Lennox]Вентиль новой конструкции обеспечивает плавное и точное регулирование при низкой производительности холодильного контура, что увеличивает его эффективность при неполной нагрузке.
[Интент]
Тематики
EN
мн. здания
сооружения
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
Синонимы
EN
3.38 структура (structure): Порядок следования элементов данных в сообщении.
Источник: ГОСТ Р ИСО 22742-2006: Автоматическая идентификация. Кодирование штриховое. Символы линейного штрихового кода и двумерные символы на упаковке продукции оригинал документа
3.2.32 структура (structure): Набор взаимосвязанных частей какого-либо сложного объекта, а также взаимосвязей между ними;
Источник: ГОСТ Р ИСО 10303-1-99: Системы автоматизации производства и их интеграция. Представление данных об изделии и обмен этими данными. Часть 1. Общие представления и основополагающие принципы оригинал документа
4.43 структура (structure): Отдельное волокно, пучок волокон, сгруппированные волокна или матрица.
Источник: ГОСТ Р ИСО 16000-7-2011: Воздух замкнутых помещений. Часть 7. Отбор проб при определении содержания волокон асбеста оригинал документа
3.13 конструкция (structure): Организованная комбинация соединенных между собой элементов, выполняющих несущие, оградительные либо совмещенные функции.
Источник: ГОСТ Р 54483-2011: Нефтяная и газовая промышленность. Платформы морские для нефтегазодобычи. Общие требования оригинал документа
Англо-русский словарь нормативно-технической терминологии > structure
32 HMI
- человеко-машинный интерфейс
- человеко-машинное взаимодействие
- терминал
- интерфейс управления концентратором
- интерфейс "человек-машина"
интерфейс "человек-машина"
аппаратно-программная система управления технологическими процессами
HMI - это набор всех средств, позволяющих человеку вмешаться в поведение вычислительной системы. Как правило, HMI представляет собой компьютер с графическим дисплеем, где в наглядной форме отображается поведение системы, и пользователь имеет возможность вмешаться в деятельность системы. Однако в качестве HMI может выступать самый простой пульт из набора тумблеров и светодиодных индикаторов.
[ http://www.morepc.ru/dict/]Тематики
Синонимы
EN
интерфейс управления концентратором
—
[Л.Г.Суменко. Англо-русский словарь по информационным технологиям. М.: ГП ЦНИИС, 2003.]Тематики
EN
терминал
Устройство ввода-вывода, обеспечивающее взаимодействие пользователей в локальной вычислительной сети или с удаленной ЭВМ через средства телеобработки данных
[ ГОСТ 25868-91]
[ ГОСТ Р 50304-92 ]Параллельные тексты EN-RU
HMI port warning
[Schneider Electric]Предупредительное состояние об ошибке обмена данными через порт связи с терминалом оператора
[Перевод Интент]HMI display max current phase enable
[Schneider Electric]Разрешается отображение на терминале оператора максимального линейного тока
[Перевод Интент]Config via HMI keypad enable
[Schneider Electric]Конфигурирование (системы) с помощью клавиатуры терминала оператора
[Перевод Интент]
Тематики
- оборуд. перифер. систем обраб. информации
- системы для сопряж. радиоэлектр. средств интерфейсные
Обобщающие термины
Синонимы
EN
человеко-машинное взаимодействие
—
[Е.С.Алексеев, А.А.Мячев. Англо-русский толковый словарь по системотехнике ЭВМ. Москва 1993]Тематики
EN
человеко-машинный интерфейс (ЧМИ)
Технические средства, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование.
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства, дисплеи.
[ ГОСТ Р МЭК 60447-2000]
человекомашинный интерфейс (ЧМИ)
Технические средства контроля и управления, являющиеся частью оборудования, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование (ГОСТ Р МЭК 60447).
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства и дисплеи.
[ ГОСТ Р МЭК 60073-2000]
человеко-машинный интерфейс
Средства обеспечения двусторонней связи "оператор - технологическое оборудование" (АСУ ТП). Название класса средств, в который входят подклассы:
SCADA (Supervisory Control and Data Acquisition) - Операторское управление и сбор данных от технологического оборудования.
DCS (Distributed Control Systems) - Распределенная система управления технологическим оборудованием.
[ http://www.morepc.ru/dict/]Параллельные тексты EN-RU
MotorSys™ iPMCC solutions can integrate a dedicated human-machine interface (HMI) or communicate via a personal computer directly on the motor starters.
[Schneider Electric]Интеллектуальный центр распределения электроэнергии и управления электродвигателями MotorSys™ может иметь в своем составе специальный человеко-машинный интерфейс (ЧМИ). В качестве альтернативы используется обмен данным между персональным компьютером и пускателями.
[Перевод Интент]
HMI на базе операторских станций
Самое, пожалуй, главное в системе управления - это организация взаимодействия между человеком и программно-аппаратным комплексом. Обеспечение такого взаимодействия и есть задача человеко-машинного интерфейса (HMI, human machine interface).
На мой взгляд, в аббревиатуре “АСУ ТП” ключевым является слово “автоматизированная”, что подразумевает непосредственное участие человека в процессе реализации системой определенных задач. Очевидно, что чем лучше организован HMI, тем эффективнее человек сможет решать поставленные задачи.
Как же организован HMI в современных АСУ ТП?
Существует, как минимум, два подхода реализации функционала HMI:- На базе специализированных рабочих станций оператора, устанавливаемых в центральной диспетчерской;
- На базе панелей локального управления, устанавливаемых непосредственно в цеху по близости с контролируемым технологическим объектам.
Иногда эти два варианта комбинируют, чтобы достичь наибольшей гибкости управления. В данной статье речь пойдет о первом варианте организации операторского уровня.
Аппаратно рабочая станция оператора (OS, operator station) представляет собой ни что иное как персональный компьютер. Как правило, станция снабжается несколькими широкоэкранными мониторами, функциональной клавиатурой и необходимыми сетевыми адаптерами для подключения к сетям верхнего уровня (например, на базе Industrial Ethernet). Станция оператора несколько отличается от привычных для нас офисных компьютеров, прежде всего, своим исполнением и эксплуатационными характеристиками (а также ценой 4000 - 10 000 долларов).
На рисунке 1 изображена рабочая станция оператора системы SIMATIC PCS7 производства Siemens, обладающая следующими техническими характеристиками:
Процессор: Intel Pentium 4, 3.4 ГГц;
Память: DDR2 SDRAM до 4 ГБ;
Материнская плата: ChipSet Intel 945G;
Жесткий диск: SATA-RAID 1/2 x 120 ГБ;
Слоты: 4 x PCI, 2 x PCI E x 1, 1 x PCI E x 16;
Степень защиты: IP 31;
Температура при эксплуатации: 5 – 45 C;
Влажность: 5 – 95 % (без образования конденсата);
Операционная система: Windows XP Professional/2003 Server.
Рис. 1. Пример промышленной рабочей станции оператора.Системный блок может быть как настольного исполнения ( desktop), так и для монтажа в 19” стойку ( rack-mounted). Чаще применяется второй вариант: системный блок монтируется в запираемую стойку для лучшей защищенности и предотвращения несанкционированного доступа.
Какое программное обеспечение используется?
На станции оператора устанавливается программный пакет визуализации технологического процесса (часто называемый SCADA). Большинство пакетов визуализации работают под управлением операционных систем семейства Windows (Windows NT 4.0, Windows 2000/XP, Windows 2003 Server), что, на мой взгляд, является большим минусом.
Программное обеспечение визуализации призвано выполнять следующие задачи:- Отображение технологической информации в удобной для человека графической форме (как правило, в виде интерактивных мнемосхем) – Process Visualization;
- Отображение аварийных сигнализаций технологического процесса – Alarm Visualization;
- Архивирование технологических данных (сбор истории процесса) – Historical Archiving;
- Предоставление оператору возможности манипулировать (управлять) объектами управления – Operator Control.
- Контроль доступа и протоколирование действий оператора – Access Control and Operator’s Actions Archiving.
- Автоматизированное составление отчетов за произвольный интервал времени (посменные отчеты, еженедельные, ежемесячные и т.д.) – Automated Reporting.
Как правило, SCADA состоит из двух частей:
- Среды разработки, где инженер рисует и программирует технологические мнемосхемы;
- Среды исполнения, необходимой для выполнения сконфигурированных мнемосхем в режиме runtime. Фактически это режим повседневной эксплуатации.
Существует две схемы подключения операторских станций к системе управления, а точнее уровню управления. В рамках первой схемы каждая операторская станция подключается к контроллерам уровня управления напрямую или с помощью промежуточного коммутатора (см. рисунок 2). Подключенная таким образом операторская станция работает независимо от других станций сети, и поэтому часто называется одиночной (пусть Вас не смущает такое название, на самом деле таких станций в сети может быть несколько).

Рис. 2. Схема подключения одиночных операторских станций к уровню управления.Есть и другой вариант. Часто операторские станции подключают к серверу или резервированной паре серверов, а серверы в свою очередь подключаются к промышленным контроллерам. Таким образом, сервер, являясь неким буфером, постоянно считывает данные с контроллера и предоставляет их по запросу рабочим станциям. Станции, подключенные по такой схеме, часто называют клиентами (см. рисунок 3).
Как происходит информационный обмен?
Рис. 3. Клиент-серверная архитектура операторского уровня.
Для сопряжения операторской станции с промышленным контроллером на первой устанавливается специальное ПО, называемое драйвером ввода/вывода. Драйвер ввода/вывода поддерживает совместимый с контроллером коммуникационный протокол и позволяет прикладным программам считывать с контроллера параметры или наоборот записывать в него. Пакет визуализации обращается к драйверу ввода/вывода каждый раз, когда требуется обновление отображаемой информации или запись измененных оператором данных. Для взаимодействия пакета визуализации и драйвера ввода/вывода используется несколько протоколов, наиболее популярные из которых OPC (OLE for Process Control) и NetDDE (Network Dynamic Data Exchange). Обобщенно можно сказать, что OPC и NetDDE – это протоколы информационного обмена между различными приложениями, которые могут выполняться как на одном, так и на разных компьютерах. На рисунках 4 и 5 изображено, как взаимодействуют программные компоненты при различных схемах построения операторского уровня.
Рис. 4. Схема взаимодействия программных модулей при использовании одиночных станций.
Рис. 5. Схема взаимодействия программных модулей при использовании клиент-серверной архитектуры.
Как выглядит SCADA?
Разберем простой пример. На рисунке 6 приведена абстрактная схема технологического процесса, хотя полноценным процессом это назвать трудно. Рис. 6. Пример операторской мнемосхемы.
Рис. 6. Пример операторской мнемосхемы.
На рисунке 6 изображен очень упрощенный вариант операторской мнемосхемы для управления тех. процессом. Как видно, резервуар (емкость) наполняется водой. Задача системы - нагреть эту воду до определенной температуры. Для нагрева воды используется газовая горелка. Интенсивность горения регулируется клапаном подачи газа. Также должен быть насос для закачки воды в резервуар и клапан для спуска воды.
На мнемосхеме отображаются основные технологические параметры, такие как: температура воды; уровень воды в резервуаре; работа насосов; состояние клапанов и т.д. Эти данные обновляются на экране с заданной частотой. Если какой-либо параметр достигает аварийного значения, соответствующее поле начинает мигать, привлекая внимание оператора.
Сигналы ввода/вывода и исполнительные механизмы отображаются на мнемосхемах в виде интерактивных графических символов (иконок). Каждому типу сигналов и исполнительных механизмов присваивается свой символ: для дискретного сигнала это может быть переключатель, кнопка или лампочка; для аналогового – ползунок, диаграмма или текстовое поле; для двигателей и насосов – более сложные фейсплейты ( faceplates). Каждый символ, как правило, представляет собой отдельный ActiveX компонент. Вообще технология ActiveX широко используется в SCADA-пакетах, так как позволяет разработчику подгружать дополнительные символы, не входящие в стандартную библиотеку, а также разрабатывать свои собственные графические элементы, используя высокоуровневые языки программирования.
Допустим, оператор хочет включить насос. Для этого он щелкает по его иконке и вызывает панель управления ( faceplate). На этой панели он может выполнить определенные манипуляции: включить или выключить насос, подтвердить аварийную сигнализацию, перевести его в режим “техобслуживания” и т.д. (см. рисунок 7). Рис. 7. Пример фейсплейта для управления насосом.Оператор также может посмотреть график изменения интересующего его технологического параметра, например, за прошедшую неделю. Для этого ему надо вызвать тренд ( trend) и выбрать соответствующий параметр для отображения. Пример тренда реального времени показан на рисунке 8.
Рис. 7. Пример фейсплейта для управления насосом.Оператор также может посмотреть график изменения интересующего его технологического параметра, например, за прошедшую неделю. Для этого ему надо вызвать тренд ( trend) и выбрать соответствующий параметр для отображения. Пример тренда реального времени показан на рисунке 8.
 Рис. 8. Пример отображения двух параметров на тренде реального времени.
Рис. 8. Пример отображения двух параметров на тренде реального времени.
Для более детального обзора сообщений и аварийных сигнализаций оператор может воспользоваться специальной панелью ( alarm panel), пример которой изображен на рисунке 9. Это отсортированный список сигнализаций (alarms), представленный в удобной для восприятия форме. Оператор может подтвердить ту или иную аварийную сигнализацию, применить фильтр или просто ее скрыть. Рис. 9. Панель сообщений и аварийных сигнализаций.
Рис. 9. Панель сообщений и аварийных сигнализаций.
Говоря о SCADA, инженеры часто оперируют таким важным понятием как “тэг” ( tag). Тэг является по существу некой переменной программы визуализации и может быть использован как для локального хранения данных внутри программы, так и в качестве ссылки на внешний параметр процесса. Тэги могут быть разных типов, начиная от обычных числовых данных и кончая структурой с множеством полей. Например, один визуализируемый параметр ввода/вывода – это тэг, или функциональный блок PID-регулятора, выполняемый внутри контроллера, - это тоже тэг. Ниже представлена сильно упрощенная структура тэга, соответствующего простому PID-регулятору:
Tag Name = “MyPID”;
Tag Type = PID;
Fields (список параметров):
MyPID.OP
MyPID.SP
MyPID.PV
MyPID.PR
MyPID.TI
MyPID.DI
MyPID.Mode
MyPID.RemoteSP
MyPID.Alarms и т.д.
В комплексной прикладной программе может быть несколько тысяч тэгов. Производители SCADA-пакетов это знают и поэтому применяют политику лицензирования на основе количества используемых тэгов. Каждая купленная лицензия жестко ограничивает суммарное количество тэгов, которые можно использовать в программе. Очевидно, чем больше тегов поддерживает лицензия, тем дороже она стоит; так, например, лицензия на 60 000 тэгов может обойтись в 5000 тыс. долларов или даже дороже. В дополнение к этому многие производители SCADA формируют весьма существенную разницу в цене между “голой” средой исполнения и полноценной средой разработки; естественно, последняя с таким же количеством тэгов будет стоить заметно дороже.
Сегодня на рынке представлено большое количество различных SCADA-пакетов, наиболее популярные из которых представлены ниже:
1. Wonderware Intouch;
2. Simatic WinCC;
3. Iconics Genesis32;
4. Citect;
5. Adastra Trace Mode
Лидирующие позиции занимают Wonderware Intouch (производства Invensys) и Simatic WinCC (разработки Siemens) с суммарным количеством инсталляций более 80 тыс. в мире. Пакет визуализации технологического процесса может поставляться как в составе комплексной системы управления, так и в виде отдельного программного продукта. В последнем случае SCADA комплектуется набором драйверов ввода/вывода для коммуникации с контроллерами различных производителей. [ http://kazanets.narod.ru/HMI_PART1.htm]Тематики
- автоматизация, основные понятия
- автоматизированные системы
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > HMI
33 programmable logic controller
контроллер с программируемой логикой
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > programmable logic controller
34 programmable controller
программируемый контроллер
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > programmable controller
35 storage-programmable logic controller
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > storage-programmable logic controller
Страницы- 1
- 2
См. также в других словарях:
Функциональный анализ (математ.) — Функциональный анализ раздел математики, в котором изучаются бесконечномерные пространства (в основном пространства функций) и их отображения. Например пространства непрерывных функций, пространства интегрируемых функций. Важную роль играют… … Википедия
Функциональный анализ (математ.) — Функциональный анализ, часть современной математики, главной задачей которой является изучение бесконечномерных пространств и их отображений. Наиболее изучены линейные пространства и линейные отображения. Для Ф. а. характерно сочетание методов… … Большая советская энциклопедия
функциональный объект — Объект, который включает неделимый набор конкретных функций. Функциональные объекты представляют собой логические понятия, при этом группировки функциональных объектов используются для описания практических, физических реализаций (МСЭ T Y.2012,… … Справочник технического переводчика
Функциональный анализ — У этого термина существуют и другие значения, см. Анализ. Функциональный анализ раздел высшей математики, в котором изучаются бесконечномерные топологические векторные пространства (в основном пространства функций[1]) и их отображения.… … Википедия
Функциональный анализ — I Функциональный анализ часть современной математики, главной задачей которой является изучение бесконечномерных пространств и их отображений. Наиболее изучены линейные пространства и линейные отображения. Для Ф. а. характерно сочетание… … Большая советская энциклопедия
АНАЛИЗ ФУНКЦИОНАЛЬНЫЙ В СОЦИОЛОГИИ — один из основных методологич. подходов в современном обществоведении; сущность А.ф. состоит в выделении элементов соц. взаимодействия, подлежащих исследованию, и определении их места и роли в нек рой связи, определенность к рой влечет за собой ее … Российская социологическая энциклопедия
Современный функциональный эквивалент сети связи — 25) современный функциональный эквивалент сети связи минимальный набор современных средств связи, обеспечивающий качество и существующий объем услуг, оказываемых в сети связи;... Источник: Федеральный закон от 07.07.2003 N 126 ФЗ (ред. от… … Официальная терминология
современный функциональный эквивалент сети связи — 45 современный функциональный эквивалент сети связи: Минимальный набор современных средств связи, обеспечивающий качество и существующий объем услуг связи, оказываемых в сети связи. Источник: ГОСТ Р 53801 2010: Связь федеральная. Термины и… … Словарь-справочник терминов нормативно-технической документации
СОВРЕМЕННЫЙ ФУНКЦИОНАЛЬНЫЙ ЭКВИВАЛЕНТ СЕТИ СВЯЗИ — минимальный набор современных средств связи, обеспечивающий качество и существующий объем услуг, оказываемых в сети связи … Юридическая энциклопедия
Современный функциональный эквивалент сети связи — 1. Минимальный набор современных средств связи, обеспечивающий качество и существующий объем услуг, оказываемых в сети связи Употребляется в документе: от 07.07.2003 № 126 ФЗ … Телекоммуникационный словарь
модуль — 02.01.13 модуль (линейная или многострочная символика штрихового кода) [module <linear or multi row bar code symbology>] (1): Номинальная единица измерения линейного размера в знаке символа. Примечание В некоторых символиках ширина элемента … Словарь-справочник терминов нормативно-технической документации
 18+© Академик, 2000-2024
18+© Академик, 2000-2024- Обратная связь: Техподдержка, Реклама на сайте
Экспорт словарей на сайты, сделанные на PHP, Joomla, Drupal, WordPress, MODx.
Перевод: с английского на русский
с русского на английский- С русского на:
- Английский
- С английского на:
- Русский