-
1 обработка информации в системах управления и регулирования
Универсальный русско-немецкий словарь > обработка информации в системах управления и регулирования
-
2 аппарат для цепей управления
аппарат для цепей управления
Коммутационный контактный аппарат, предназначенный для управления работой систем управления и распределения электрической энергии, в т. ч. сигнализации, электрической блокировки и т. д.
Примечания:
1. Аппарат для цепей управления содержит один или несколько коммутационных элементов и общий механизм управления.
2. Это определение отличается от приведенного в МЭС 441-14-46, поскольку аппарат для цепей управления может содержать полупроводниковые или контактные элементы.
[ ГОСТ 50030.5.1-2005]
аппарат для цепи управления
Электрическое устройство, предназначенное для управления, сигнализации, блокировки и т. п. в системах аппаратуры распределения и управления.
Примечание. В конструкцию аппаратов для цепей управления могут входить связанные с ними устройства, рассматриваемые в других стандартах, типа контрольно-измерительных приборов, потенциометров, реле, если они используются для установленных целей.
[ ГОСТ Р 50030. 1-2000 ( МЭК 60947-1-99)]EN
control switch (for control and auxiliary circuits)
a mechanical switching device which serves the purpose of controlling the operation of switchgear or controlgear, including signalling, electrical interlocking, etc
NOTE – A control switch consists of one or more contact elements with a common actuating system.
[IEV number 441-14-46]FR
auxiliaire de commande (pour circuits auxiliaires de commande)
appareil mécanique de connexion dont la fonction est de commander la manoeuvre d'un appareillage, y compris la signalisation, le verrouillage électrique, etc
NOTE – Un auxiliaire de commande comporte un ou plusieurs éléments de contact et un mécanisme transmetteur commun.
[IEV number 441-14-46]Тематики
- аппарат, изделие, устройство...
EN
DE
FR
Русско-немецкий словарь нормативно-технической терминологии > аппарат для цепей управления
-
3 программа управления задачами
Универсальный русско-немецкий словарь > программа управления задачами
-
4 поток управления
Steuerfluß, ( в системах гидропривода) Steuerstrom -
5 электромагнитный пускатель
электромагнитный пускатель
Пускатель, у которого сила, необходимая для замыкания главных контактов, обеспечивается электромагнитом.
[ ГОСТ Р 50030.4.1-2002 (МЭК 60947-4-1-2000)]
пускатель магнитный
Электрический выключатель переменного тока с магнитным приводом, предназначенный, главным образом, для дистанционного пуска, остановки и защиты трёхфазных асинхронных электродвигателей с короткозамкнутым ротором
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]
магнитный пускатель
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]EN
electromagnetic starter
starter in which the force for closing the main contacts is provided by an electromagnet
[IEC 60947-4-1, ed. 3.0 (2009-09)]FR
démarreur électromagnétique
démarreur pour lequel l'effort nécessaire à la fermeture des contacts principaux est fourni par un électro-aimant
[IEC 60947-4-1, ed. 3.0 (2009-09)]Магнитные пускатели переменного тока предназначены в основном для дистанционного управления асинхронными электродвигателями. Осуществляют также нулевую защиту, т. е. при исчезновении напряжения или его снижении на 40-60 % от номинального магнитная система отпадает и главные контакты размыкаются. В комплекте с тепловым реле пускатели выполняют также защиту электродвигателей от перегрузок и от токов, возникающих при обрыве одной из фаз.
Пускатели выпускаются в открытом, защищенном и пылебрызгонепроницаемом исполнениях, с тепловыми реле и без них, бывают реверсивными и нереверсивными.
Устройство пускателя серии ПМЕ
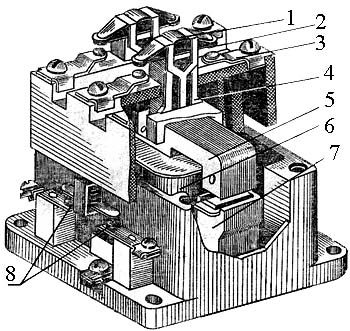
Внутри корпуса пускателя размещена электромагнитная система, включающая в себя неподвижную Ш-образную часть сердечника 7 и обмотку 6, намотанную на катушку. Сердечник набран из изолированных друг от друга (для уменьшения потерь от вихревых токов) листов электротехнической стали. Подвижная часть сердечника 5 (якорь) соединена с пластмассовой траверсой 4, на которой смонтированы контактные мостики 2 с подвижными контактами. Плавность замыкания контактов и необходимое усилие нажатия обеспечиваются контактными пружинами 1. Неподвижные контакты припаяны к контактным пластинам 3, снабженным винтовыми зажимами для присоединения проводов внешней цепи. Кроме главных контактов, пускатели имеют дополнительные (блокировочные) контакты 8, расположенные на боковых поверхностях аппарата. Главные контакты закрыты крышкой, защищающей их от загрязнения, случайных прикосновений и междуфазных замыканий.
[ http://www.electromonter.info/handbook/magnetic_starter.html]
Пускатели электромагнитные типа ПМ12-125
Пускатели электромагнитные типа ПМ12-125 предназначены для применения главным образом в стационарных установках для дистанционного пуска непосредственным подключением к сети, останова и реверсирования трехфазных асинхронных электродвигателей с короткозамкнутым ротором при напряжении до 660 В переменного тока частотой 50 или 60 Гц.
Для ограничения коммутационных перенапряжений, возникающих при отключении пускателей на катушках управления, могут устанавливаться ограничители перенапряжений (ОПН). Пускатели, комплектуемые ОПН, пригодны для работы в системах управления с применением микропроцессорной техники
[ http://www.kzeap.ru/katalog/k022.pdf]Тематики
Синонимы
EN
- automatic tripping contactor
- electromagnetic starter
- M/S
- magnetic starter
- magnetic switch
- motor contactor
- solenoid starter
DE
FR
Русско-немецкий словарь нормативно-технической терминологии > электромагнитный пускатель
-
6 ввод данных
n2) comput. Dateneinleitung (ñì. Eingabe), Eintrag4) milit. Schreiben5) eng. Dateneinführung, Einführung der Daten, Eingabe der Daten6) law. Dateneingabe (напр., в базу данных)7) econ. Eingang8) electr. Dateneingabe (в вычислительных машинах), Eingabe9) IT. Dateneingang (ñì. Eingabe), Eingabeverkehr, Einlesen (напр. в ЗУ), Informationseingabe, Input10) wood. Eingabe (в станках с программным управлением), Zubringung (в электронных системах управления) -
7 замещение страниц
-
8 исходная точка
adj1) gener. Anfangspunkt, Bezugspunkt2) geol. Ausgangspunkt3) Av. Ablaufpunkt4) sports. Startpunkt5) milit. Abgangspunkt, Grundpunkt6) astr. Ausgangsort7) artil. Anhaltspunkt, Nullpunkt8) radio. Fußpunkt, Ruhepunkt, Startort9) electr. Datumpunkt (в системах управления)10) shipb. Anhalt -
9 метод замещения страниц
Универсальный русско-немецкий словарь > метод замещения страниц
-
10 метод подкачки страниц
Универсальный русско-немецкий словарь > метод подкачки страниц
-
11 подкачка страниц
-
12 программа выдачи команд
ncomput. (стандартная) Befehlsroutine (в системах управления)Универсальный русско-немецкий словарь > программа выдачи команд
-
13 страничный блок
-
14 управление страничным обменом
Универсальный русско-немецкий словарь > управление страничным обменом
-
15 уровень производственного модуля
Универсальный русско-немецкий словарь > уровень производственного модуля
-
16 программируемый логический контроллер
- speicherprogrammierbare Steuerung, f
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего. Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы. Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7. Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series. Рис. 4. Резервированный контроллер FCP270.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA). Рис. 5. Контроллер AC800M.
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-немецкий словарь нормативно-технической терминологии > программируемый логический контроллер
17 система кондиционирования воздуха
система кондиционирования воздуха
Совокупность воздухотехнического оборудования, предназначенная для кондиционирования воздуха в помещениях
[ ГОСТ 22270-76]
система кондиционирования воздуха
Совокупность технических средств для обработки и распределения воздуха, а также автоматического регулирования его параметров с дистанционным управлением всеми процессами
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]
система кондиционирования воздуха
Комбинация всех компонент, необходимых для обработки воздуха, в процессе которой осуществляется контроль или понижение температуры, возможно, в комбинации с контролем вентиляции, влажности и чистоты воздуха.
[ДИРЕКТИВА 2002/91/ЕС ЕВРОПЕЙСКОГО ПАРЛАМЕТА И СОВЕТА от 16 декабря 2002 г. по энергетическим характеристикам зданий]
КЛАССИФИКАЦИЯ-
По назначению
-
Комфортные
-
Технологические
-
Комфортные
-
По способу охлаждения воздуха
- Непосредственного охлаждения (с непосредственным охлаждением воздуха)
- Косвенного охлаждения (с водяным охлаждением воздуха - чиллеры и фанкойлы)
-
По степени централизации
- Центральные
-
Зональные
- Однозональные
-
Мультизональные (VRF-системы)
- Местные
-
По степени использования наружного воздуха
-
По автономности
-
По способу комплектации
-
По конструктивному оформлению
-
Моноблочные
-
Сплит-системы
-
По конструктивному исполнению внутреннего блока
-
По количеству внутренних блоков
-
По конструктивному исполнению внутреннего блока
-
Моноблочные
-
По размещению конденсатора
-
По способу охлаждения конденсатора
- С воздушным охлаждением конденсатора
- С осевыми вентиляторами
- С радиальными вентиляторами
- С водяным охлаждением конденсатора
- С использованием проточной (водопроводной, бросовой) воды
- С использованием оборотной (из градирни) воды
-
По способу управления компрессором
-
По режиму работы
-
По дополнительной комплектации
-
По месту установки
-
По способу подачи воздуха
- С непосредственной подачей воздуха в кондиционируемое помещение
-
С подачей воздуха через воздуховод (канальные)
Классификация систем кондиционирования воздухаМ. Г. Тарабанов, директор НИЦ «ИНВЕНТ», канд. техн. наук, вице-президент НП «АВОК», лауреат премии НП «АВОК» «Медаль имени И. Ф. Ливчака», «Медаль имени В. Н. Богословского», otvet@abok.ru
Общие положения
Краткий, но достаточно полный обзор истории развития кондиционирования воздуха представлен в работе А. И. Липы [1], поэтому отметим только несколько моментов. Родоначальником техники кондиционирования воздуха в ее современном понимании считается американский инженер Виллис Хэвилэнд Кэрриер (Willis Haviland Carrier), который в 1902 году в Нью-Йорке в Бруклинской типографии применил поверхностный водяной воздухоохладитель с вентилятором для получения летом в помещении температуры +26,5 °C и относительной влажности 55 %. Вода охлаждалась в аммиачной холодильной машине. Зимой для увлажнения внутреннего воздуха до 55 % использовался водяной пар от бойлера.
Термин «кондиционирование воздуха» был предложен в 1906 году Стюартом Уорреном Крамером (Stuart Warren Cramer).
В отечественной практике некоторые авторы применяют термин «кондиционирование микроклимата». Заметим, что этот термин отличается от «кондиционирования воздуха», так как включает в себя дополнительные факторы, не связанные с состоянием воздушной среды в помещении (шум, инсоляция и др.).
К сожалению, несмотря на солидный возраст термин «кондиционирование воздуха» не получил четкого определения в современных отечественных нормативных документах. Для устранения этого пробела сформулируем: «Кондиционирование воздуха – это создание и автоматическое поддержание в обслуживаемом помещении или технологическом объеме требуемых параметров и качества воздуха независимо от внутренних возмущений и внешних воздействий». К параметрам воздуха относятся: температура, относительная влажность или влагосодержание и подвижность. Качество воздуха включает в себя газовый состав, запыленность, запахи, аэроионный состав, т. е. более широкий круг показателей, чем термин «чистота», используемый в [2].
Комплекс оборудования, элементов и устройств, с помощью которых обеспечивается кондиционирование воздуха в обслуживаемых помещениях, называется системой кондиционирования воздуха (СКВ).
Приведенное выше определение системы кондиционирования воздуха по смыслу полностью совпадает с определением ASHRAE: «”air-conditioning system” – комплекс оборудования для одновременной обработки и регулирования температуры, влажности, чистоты воздуха и распределения последнего в соответствии с заданными требованиями» [3].
Общепринятого, устоявшегося мнения, что следует включать в состав СКВ, к сожалению, нет.
Так, например, по мнению О. Я. Кокорина [4] СКВ может включать в себя:- установку кондиционирования воздуха (УКВ), обеспечивающую необходимые кондиции воздушной среды по тепловлажностным качествам, чистоте, газовому составу и наличию запахов;
- средства автоматического регулирования и контроля за приготовлением воздуха нужных кондиций в УКВ, а также для поддержания в обслуживаемом помещении или сооружении постоянства заданных кондиций воздуха;
- устройства для транспортирования и распределения кондиционированного воздуха;
- устройства для транспортирования и удаления загрязненного внутреннего воздуха;
- устройства для глушения шума, вызываемого работой элементов СКВ;
- устройства для приготовления и транспортирования источников энергии, необходимых для работы аппаратов в СКВ.
В зависимости от конкретных условий некоторые составные части СКВ могут отсутствовать.
Однако согласиться с отдельными пунктами предложенного состава СКВ нельзя, так как если следовать логике автора [4], то в состав СКВ должны войти и системы оборотного водоснабжения, водопровода и канализации, ИТП и трансформаторные, которые также необходимы для работы аппаратов в СКВ.
Достаточно полное представление о структуре СКВ дает разработанная во ВНИИкондиционере «Блок-схема системы кондиционирования воздуха» (рис. 1) [5].
Включенные в эту блок-схему подсистемы обработки воздуха по своему функциональному назначению делятся на блоки:
- основной обработки и перемещения: Б1.1 – приемный, Б1.8 – очистки, Б1.2 – сухого (первого) подогрева, Б1.3 – охлаждения, Б1.6 – тепловлажностной обработки, Б1.9 – перемещения приточного воздуха;
- дополнительной обработки и перемещения: Б2.1 – утилизации, Б2.2 – предварительного подогрева, Б2.3 – доводки общей (второй подогрев, дополнительное охлаждение), Б2.4 – зональной доводки, Б2.5 – местной доводки (эжекционные доводчики и др.), Б2.7 – шумоглушения, Б2.8 – перемещения рециркуляционного воздуха;
- специальной обработки: Б5.5 – тонкой очистки;
- воздушной сети: Б4.2 – воздухораспределительных устройств, Б4.3 – вытяжных устройств, Б4.5 – воздуховодов;
- автоматизации – арматуры – Б3.1.
Помимо этих блоков в СКВ может входить система холодоснабжения (снабжение электроэнергией и теплом осуществляется, как правило, централизованно). Ее включение в состав СКВ, видимо, относится к автономным кондиционерам (см. далее).
Для определения состава оборудования, входящего в СКВ, и границ раздела целесообразно воспользоваться делением на разделы, которое сложилось в практике проектирования.
В частности, при выполнении проектов кондиционирования воздуха достаточно серьезных объектов обычно выделяют в самостоятельные разделы: теплоснабжение СКВ; холодоснабжение и холодильные центры; электроснабжение; автоматизация; водоснабжение, в том числе оборотное, канализация и дренаж.
Причем по каждому из разделов составляют свою спецификацию, в которую включено оборудование, материалы и арматура, относящиеся к своему конкретному разделу.
Таким образом, в состав СКВ следует включить:- УКВ, предназначенную для очистки и тепловлажностной обработки и получения необходимого качества воздуха и его транспортировки по сети воздуховодов до обслуживаемого помещения или технического объема;
- сеть приточных воздуховодов с воздухораспределителями, клапанами и регулирующими устройствами;
- вытяжной вентилятор и сеть вытяжных и рециркуляционных воздуховодов с сетевым оборудованием;
- сеть фреоновых трубопроводов для сплит-систем и VRV-систем с кабелями связи наружных блоков с внутренними;
- фэнкойлы, эжекционные доводчики, моноблоки, холодные и теплые потолки и балки и др. доводчики для охлаждения и (или) нагревания непосредственно внутреннего воздуха;
- оборудование для утилизации теплоты и холода;
- дополнительные воздушные фильтры, шумоглушители и другие элементы.
И даже систему автоматики, входящую в СКВ как бы по определению, целесообразно выделить отдельно, так как ее проектируют инженеры другой специальности, хотя и по заданию так называемых технологов СКВ.
Границей СКВ и систем теплохолодоснабжения можно считать узлы регулирования, а границей электроснабжения и автоматики – электрические щиты и щиты управления, которые в последнее время очень часто делают совмещенными.Классификация систем кондиционирования воздуха
Проблемам классификации СКВ в большей или меньшей степени уделяли внимание практически все авторы учебников и монографий по кондиционированию воздуха. Вот что написал по этому вопросу известный специалист, доктор техн. наук А. А. Рымкевич [6]: «Анализ иерархической структуры самих СКВ прежде всего требует их классификации и только затем их декомпозиции на подсистемы. …Однако для СКВ, решения которых базируются на учете большого числа данных, разработать такую классификацию всегда сложно. Не случайно в литературе нет единого мнения по данному вопросу, и поэтому многие известные авторы… предложили различные методы классификации».
Предложенная А. А. Рымкеви-чем концепция выбора признаков классификации СКВ сформулирована очень точно, и с ней нельзя не согласиться. Проблема состоит в том, как этой концепцией воспользоваться и какие признаки считать определяющими, а какие вторичными, и как точно сформулировать эти признаки.
В начале восьмидесятых годов прошлого века наиболее полная классификация СКВ была предложена в работе Б. В. Баркалова и Е. Е. Карписа [7].
Основные признаки этой классификации с некоторыми дополнениями использованы и в недавно изданной монографии А. Г. Сотникова [8] и в других работах, однако некоторые формулировки отдельных признаков требуют уточнения и корректировки.
Например, для опытных специалистов не составит труда разделить СКВ на центральные и местные, посмотрим, как признак такого деления сформулирован разными авторами.
Б. В. Баркалов, Е. Е. Карпис пишут [7]: «В зависимости от расположения кондиционеров по отношению к обслуживаемым помеще-ниям СКВ делятся на центральные и местные». А. Г. Сотников [8] считает необходимым дополнить: «Деление на местные и центральные СКВ учитывает как место установки кондиционера, так и группировку помещений по системам», а О. Я. Кокорин уточняет: «По характеру связи с обслуживаемым помещением можно подразделить СКВ на три вида: центральные, местные и центрально-местные. Центральные СКВ характеризуются расположением УКВ в удалении от обслуживаемых объектов и наличием приточных воздуховодов значительной протяженности. Местные СКВ характеризуются расположением УКВ в самом обслуживаемом помещении или в непосредственной близости от него, при отсутствии (или наличии весьма коротких) приточных воздуховодов. Центрально-местные СКВ характеризуются как наличием УКВ в удалении от обслуживаемых объектов, так и местных УКВ, располагаемых в самих помещениях или в непосредственной близости от них».
Трудно понять, что имеется в виду под группировкой помещений по системам и что считается протяженными или весьма короткими воздуховодами. Например, кондиционеры, обслуживающие текстильные цеха на Волжском заводе синтетического волокна, имеют производительность по воздуху до 240 м3/ч и расположены рядом с обслуживаемыми помещениями, то есть непосредственно за стенами, но никто из указанных выше авторов не отнес бы их к местным системам.
Несколько иной признак клас-сификации предложил Е. В. Стефанов [9]: «… по степени централизации – на системы центральные, обслуживающие из одного центра несколько помещений, и местные, устраиваемые для отдельных помещений и располагающиеся, как правило, в самих обслуживаемых помещениях».
К сожалению, и эта формулировка является нечеткой, так как одно большое помещение могут обслуживать несколько центральных кондиционеров, а группу небольших помещений – один местный кондиционер.
Фактически в отечественной практике негласно действовал совсем другой признак классификации: все кондиционеры, выпускавшиеся Харьковским заводом «Кондиционер», кроме шкафных, считались центральными, а все кондиционеры, выпускавшиеся Домодедовским заводом «Кондиционер», кроме горизонтальных производительностью 10 и 20 тыс. м3/ч, – относились к местным.
Конечно, сегодня такое деление выглядит смешным, а между тем в нем был определенный здравый смысл.
Известно, что в местных системах используются готовые агрегаты полной заводской сборки обычно шкафного типа со стандартным набором тепломассообменного оборудования с уже готовыми, заданными заранее техническими характеристиками, поэтому местные УКВ не проектируют, а подбирают для конкретного обслуживаемого помещения или группы небольших однотипных помещений.
Максимальная производительность местных систем по воздуху обычно не превышает 20–30 тыс. м3/ч.
Центральные кондиционеры могут быть также полной заводской сборки или собираются на месте монтажа, причем технические характеристики всех элементов, включая воздушные фильтры, вентиляторы и тепломассообменное оборудование, задаются производителями в очень широких пределах, поэтому такие кондиционеры не подбирают, а проектируют, а затем изготавливают в соответствии с бланком-заказом для конкретного объекта.
Обычно центральные кондиционеры собирают в виде горизонтальных блоков, причем производительность таких кондиционеров по воздуху значительно больше, чем у местных и достигает 100–250 тыс. м3/ч у разных фирм-производителей.
Очевидно, что отмеченные признаки относятся к УКВ, но их можно использовать и для классификации СКВ, например, СКВ с центральной УКВ – центральная СКВ, а с местной УКВ – местная СКВ. Такой подход не исключает полностью признаки, предложенные другими авторами, а дополняет их, исключая некоторые неопределенности, типа протяженности воздуховодов и др.
Для дальнейшей классификации СКВ рассмотрим схему ее функционирования.
На параметры внутреннего воздуха в обслуживаемом помещении или технологическом объеме оказывают воздействие внутренние возмущения, то есть изменяющиеся тепло- и влаговыделения, а также внешние факторы, например, изменение температуры и влагосодержания наружного воздуха, воздействие на остекленный фасад прямой солнечной радиации в разное время суток и др.
Задача СКВ состоит в том, чтобы улавливать и своевременно устранять последствия этих возмущений и воздействий для сохранения параметров внутреннего воздуха в заданных пределах, используя систему автоматического регулирования и необходимый набор оборудования (воздухоохладители, воздухонагреватели, увлажнители и др.), а также источники теплоты и холода.
Поддерживать требуемые параметры внутреннего воздуха можно изменяя параметры или расход приточного воздуха, подаваемого в помещение извне, или с помощью аппаратов, установленных непосредственно в помещении, так называемых доводчиков.
Сегодня в качестве доводчиков используют внутренние блоки сплит-систем и VRV-систем, фэнкойлы, моноблоки, охлаждаемые потолки и балки и другие элементы.
К сожалению, в классификации [7] вместо понятия «доводчики» используется понятие «водовоздушные СКВ», а в классификации [8] дополнительно вводится термин «водо- и фреоновоздушная СКВ». С подобными предложениями нельзя согласиться в принципе, так как их авторы вольно или невольно присваивают сплит-системам или фэнкойлам статус систем кондиционирования воздуха, которыми они не являются и, естественно, не могут входить в классификацию СКВ, поскольку являются всего лишь местными охладителями или нагревателями, то есть не более чем доводчиками.
Справедливости ради отметим, что Б. В. Баркалов начинает описание центральных водовоздушных систем очень точной фразой: «В каждое помещение вводится наружный воздух, приготовленный в центральном кондиционере. Перед выпуском в помещение он смешивается с воздухом данного помещения, предварительно охлажденным или нагретым в теплообменниках кондиционеров?доводчиков, снабжаемых холодной и горячей водой». Приведенная цитата показывает, что автор хорошо понимает неопределенность предложенного им признака классификации и поэтому сразу поясняет, что он имеет в виду под центральными водовоздушными системами.
Системы без доводчиков могут быть прямоточными, когда в помещение подается обработанный наружный воздух, и с рециркуляцией, когда к наружному воздуху подмешивают воздух, забираемый из помещения. Кроме того, технологические СКВ, обслуживающие помещения или аппараты без пребывания людей, могут работать без подачи наружного воздуха со 100 % рециркуляцией. В зависимости от алгоритма работы СКВ различают системы с постоянной рециркуляцией, в которых соотношение количества наружного и рециркуляционного воздуха во время работы не изменяется, и СКВ с переменной рециркуляцией, в которых количество наружного воздуха может изменяться от 100 % до некоторого нормируемого минимального уровня.
Кроме того, системы с рециркуляцией могут быть одновентиляторными и двухвентиляторными. В первых системах подача приточного воздуха в помещение, а также забор наружного и рециркуляционного воздуха осуществляется приточным вентилятором УКВ. Во втором случае для удаления воздуха из помещения и подачи его на рециркуляцию или на выброс применяют дополнительный вытяжной вентилятор.
Независимо от схемы компоновки и устройства отдельных элементов СКВ подразделяют также по их назначению. Многие авторы делят СКВ на комфортные, технологические и комфортно-технологические. Более удачной и полной представляется классификация СКВ по назначению на эргономической основе, разработанная ВНИИкондиционером [5].
Определено, что СКВ могут выполнять одну из трех функций обслуживания: машин; машин + людей; людей.
1-я группа (символ «машина») определена как технологические СКВ. СКВ этой группы обслуживают технологические аппараты, камеры, боксы, машины и т. п., то есть применяются в тех случаях, когда условия воздушной среды диктуются обеспечением работоспособности технологического оборудования. При этом параметры воздушной среды могут отличаться от тех, которые определяются санитарно-гигиеническими нормами.
1-я группа имеет две модификации:- Подгруппа 1–1 включает в себя кондиционируемые объекты, полностью исключающие возможность пребывания в них человека, то есть это системы технологического охлаждения, обдува электронных блоков вычислительных машин, шахты обдува волокна прядильных машин и т. п.
- Подгруппа 1–2 включает в себя кондиционируемые объекты: технологические аппараты (машины, камеры, боксы) и помещения с особыми параметрами воздушной среды (калориметрического, экологического и другого назначения), в которых человек отсутствует или находится эпизодически (для снятия показаний приборов, изменения режима работы и т. д.).
Если для группы 1–1 отсутствуют какие-либо ограничения по параметрам и составу воздушной среды, то для объектов подгруппы 1–2 газовый состав воздушной среды должен находиться в пределах, установленных ГОСТ.
2-я группа (символ «машина + человек») определена как технологически комфортные СКВ. СКВ этой группы обслуживают производственные помещения, в которых длительно пребывают люди.
2-я группа имеет три модификации:- Подгруппа 2–1. Технологически комфортные СКВ обеспечивают условия нормального осуществления технологических процессов как для производств, в которых затруднено или практически невозможно получение продукции без поддержания определенных параметров воздушной среды, так и для производств, в которых колебания параметров воздуха существенно влияют на качество продукции и величину брака.
- Для этих помещений СКВ устраивается в первую (и основную) очередь по требованиям технологии, однако в связи с наличием в этих помещениях людей, параметры КВ устанавливают с учетом требований санитарно-гигиенических норм.
- Подгруппа 2–2. СКВ создаются для исключения дискомфортных условий труда при тяжелых режимах работы людей (кабины крановщиков мостовых кранов металлургических заводов и ТЭЦ, кабины строительно-дорожных машин и т. д.). Производственные или экономические аспекты для этих установок имеют второстепенное значение.
- Подгруппа 2–3. СКВ обеспечивают в производственных помещениях комфортные условия труда, способствующие повышению производительности труда, улучшению проведения основных технологических режимов, снижению заболеваемости, уменьшению эксплуатационных затрат и т. п.
3-я группа (символ «люди») определена как комфортные СКВ, обеспечивающие санитарно-гигиенические условия труда, отдыха или иного пребывания людей в помещениях гражданских зданий, то есть вне промышленного производства.
Эта группа имеет две модификации:- Подгруппа 3–1. СКВ обслуживают помещения общественных зданий, в которых для одной части людей пребывание в них кратковременно (например, покупатели в универмаге), а для другой – длительно (например, продавцы в этом же универмаге).
- Подгруппа 3–2. СКВ обеспечивают оптимальные условия пребывания людей в жилых помещениях.
В классификацию ВНИИконди-ционера необходимо ввести еще одну группу – медицинские СКВ. Очевидно, что СКВ, обслуживающие операционные, реанимационные или палаты интенсивной терапии, никак нельзя считать комфортными, а чтобы отнести их к технологическим, надо в качестве «машины» рассматривать самого человека, что просто глупо.
Медицинские СКВ должны иметь две подгруппы:- Подгруппа 4–1. СКВ обслуживают операционные, реанимационные и т. п. помещения.
- Подгруппа 4–2. СКВ обеспечивают требуемые параметры воздуха в палатах, кабинетах врачей, процедурных и т. п.
Для завершения классификации СКВ рассмотрим еще несколько признаков.
По типу системы холодоснабжения различают автономные и неавтономные СКВ. В автономных источник холода встроен в кондиционер, в неавтономных – источником холода является отдельный холодильный центр. Кроме того, в автономных кондиционерах в воздухоохладитель может подаваться кипящий хладон или жидкий промежуточный хладоноситель (холодная вода, растворы). Заметим, что на многих объектах мы использовали схему с подачей хладона в воздухоохладитель центрального кондиционера от расположенной рядом холодильной машины или внешнего блока VRV.
По способу компенсации изменяющихся тепловых и (или) влажностных возмущений в обслуживаемом помещении различают СКВ с постоянным расходом воздуха (CAV) – системы, в которых внутренние параметры поддерживают изменяя температуру и влажность приточного воздуха (качественное регулирование), и системы с переменным расходом воздуха (VAV) – системы с количественным регулированием.
По числу воздуховодов для подачи кондиционированного воздуха в помещенияСКВ делятся на одноканальные и двухканальные, при этом приточный воздух в каждом канале имеет разную температуру и влажность, что позволяет, изменяя соотношение приточного воздуха, подаваемого через каждый канал, поддерживать требуемые параметры в обслуживаемом помещении.
По числу точек стабилизации одноименного параметра (t; φ)в большом помещении или группе небольших помещений различают одно- и многозональные СКВ.
–это СКВ с местными доводчиками. В этих СКВ центральная или местная УКВ подает в помещение санитарную норму наружного воздуха, даже не обязательно обработанного, а местные доводчики обеспечивают поддержание в помещении требуемых параметров воздуха (температуры, относительной влажности и подвижности).
Сегодня в качестве местных доводчиков применяют: внутренние блоки сплит-систем или VRV-систем; фэнкойлы (двух- или четырехтрубные); моноблоки (напольные, потолочные или настенные); эжекционные доводчики; местные увлажнители воздуха; охлаждаемые и нагреваемые потолки; охлаждающие балки (пассивные и активированные).
Все указанные доводчики сами по себе не являются кондиционерами, хотя их и называют так продавцы оборудования.
Известно, что некоторые фирмы работают над созданием, например, фэнкойлов или сплит-систем, подающих в помещение наружный воздух. Но, если это и произойдет в массовом масштабе, то ничего страшного с классификацией не случится, просто это оборудование получит статус местных кондиционеров.
Блок-схема рассмотренной классификации СКВ приведена на рис. 2.
Помимо рассмотренных признаков в схему на рис. 2 включен еще один: наличие утилизаторов теплоты и холода, которые могут быть как в центральных, так и в местных СКВ. Причем необходимо различать системы утилизации типа воздух-воздух, к которым относятся схемы с промежуточным теплоносителем, с пластинчатыми теплообменниками* и с регенеративными вращающимися и переключаемыми теплообменниками, а также системы утилизации теплоты оборотной воды и теплоты обратного теплоносителя систем централизованного теплоснабжения и систем технологического жидкостного охлаждения.Литература
- Липа А. И. Кондиционирование воздуха. Основы теории. Совре-менные технологии обработки воздуха. – Одесса: Издательство ВМВ, 2010.
- СНиП 41–01–2003. Отопление, вентиляция, кондиционирование. М.: Госстрой России. – 2004.
- Англо-русский терминологический словарь по отоплению, вентиляции, кондиционированию воздуха и охлаждению. М.: Изд-во «АВОК-ПРЕСС», 2002.
- Кокорин О. Я. Энергосберегаю-щие системы кондиционирования воздуха. ООО «ЛЭС». – М., 2007.
- Кондиционеры. Каталог-спра-воч-ник ЦНИИТЭстроймаш. – М., 1981.
- Рымкевич А. А. Системный анализ оптимизации общеобменной вентиляции и кондиционирования воздуха. Изд. 1. – М.: Стройиздат, 1990.
- Баркалов Б. В., Карпис Е. Е. Кондиционирование воздуха в промышленных, общественных и жилых зданиях. Изд. 2. – М.: Стройиздат, 1982.
- Сотников А. Г. Процессы, аппараты и системы кондиционирования воздуха и вентиляции. Т. 1. ООО «АТ». – С.-Петербург, 2005.
- Стефанов Е. В. Вентиляция и кондиционирование воздуха. – С.-Петербург: Изд-во «АВОК-Северо-Запад», 2005.
[ http://www.abok.ru/for_spec/articles.php?nid=5029]
Тематики
EN
DE
FR
Русско-немецкий словарь нормативно-технической терминологии > система кондиционирования воздуха
18 рабочая жидкость
adj1) Av. Preßöl (гидросистемы), Steuerflüssigkeit (системы управления), hydraulisches Betätigungsmedium2) eng. Abtragflüssigkeit, Betriebsmedium, Druckflüssigkeit (в гидравлической системе), Druckmittel (в гидравлических системах), Druckübertragungsmittel (в гидравлических системах), Kraftflüssigkeit, Preßflüssigkeit (в гидравлической системе), Regelöl (системы регулирования), Treibmittel, Triebflüssigkeit, Betriebsflüssigkeit (для гидравлических систем)3) auto. Hydraulikflüssigkeit (в гидроприводе), Steuerflüssigkeit4) electr. Druckflüssigkeit (в гидравлических системах)5) oil. (рабочая) Fluid, Treibflüssigkeit, funktionelle Flüssigkeit, fördernde Flüssigkeit (в струйном насосе)6) silic. Preßflüssigkeit (гидравлического пресса), Preßwasser (гидравлического пресса)7) atom. Arbeitsflüssigkeit8) cool. Prozessfüssigkeit9) weld. Arbeitsmedium, Druckflüssigkeit (в гидроприводе), Preßflüssigkeit (в гидросистеме пресса)10) hydraul. Drucköl, Hydrauliköl (на масляной основе), Hydroflüssigkelt (для гидропривода)11) aerodyn. Meßflüssigkeit (манометра)12) shipb. Kraftöl, Steuerwasser, Steueröl, Treibstoff19 критерий оптимальности
критерий оптимальности
Наиболее существенный признак оценок, определяющих условия достижения цели какой-либо деятельности; К.о. стремится к экстремальному значению
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]
критерий оптимальности
Фундаментальное понятие современной экономики (которая переняла его из математического программирования и математической теории управления); применительно к той или иной экономической системе это один из возможных критериев (признаков) ее качества, а именно — тот признак, по которому функционирование системы признается наилучшим из возможных (в данных объективных условиях) вариантов ее функционирования. Применительно к конкретным экономическим решениям К.о. — показатель, выражающий предельную меру экономического эффекта от принимаемого решения для сравнительной оценки возможных решений (альтернатив) и выбора наилучшего из них. Это может быть, например, максимум прибыли, минимум затрат, кратчайшее время достижения цели и т.д. К.о. — важнейший компонент любой оптимальной экономико-математической модели. Чем больше (если нас интересует максимум) или чем меньше (если нужен минимум) показатель критерия, тем больше удовлетворяет нас решение задачи. Если решается задача составления хозяйственного плана, то это означает, что выбран наилучший, оптимальный план: все остальные варианты н е м о г у т дать столь же удовлетворительного результата. Если решается, например, задача исследования операций по организации строительства завода, то это означает, что выбраны наилучшая очередность работ, наиболее рациональное распределение сил и ресурсов и т.д., а все другие варианты приведут к более поздним срокам пуска завода. К.о. носит обычно количественный характер, т.е. он применяется для того, чтобы качественный признак плана, выражаемый соотношением «лучше — хуже», переводить в количественно определенное «больше — меньше». Но применяются и порядковые критерии. В последнем случае определяется лишь то, что один вариант лучше или хуже других, но не выясняется, насколько именно. В экономико-математических задачах критерию оптимальности соответствует математическая форма — целевая функция, экстремальное значение которой (см. Экстремум), характеризует предельно достижимую эффективность моделируемого объекта (т.е. наилучшие в заданном отношении структуру, состояние, траекторию развития). Другим возможным выражением К.о. является шкала (оценок полезности, ранжирования предпочтений и т.д.). В реальной практике планирования К.о. не может и не должен носить жесткого однозначного характера. Оперируя с ним, следует иметь в виду такие факторы, как вероятное изменение условий, возникновение новых возможностей реализации плана, а также новых задач. Приходится поэтому поступаться величиной критериального показателя ради гибкости плана и его надежности. Это достигается как формальными, так и неформальными методами. На схеме к статье «Экономическая система» (рис. Э.2) стрелка W имеет направление, соответствующее движению в сторону лучшего качества результатов функционирования экономической системы, т.е. в сторону лучшего удовлетворения общества в материальных благах. Упорядоченность точек шкалы W (и соответственно шкал V1, …, Vn) принято формализовать с помощью целевой функции F(w), которая отождествляется с К.о. Упорядочение точек шкалы W, как и точек шкал V есть субъективный акт. Оно может строиться в зависимости от того, что понимается под целью данной экономической системы, но с учетом ее реальных возможностей (объективная основа) и качества управления системой (субъективная основа). Способы упорядочения различны: а) установление цели внешним по отношению к данной экономической системе или иным обладающим соответствующими правами субъектом управления; б) согласование тем или иным способом шкал предпочтения самостоятельных субъектов управления (социальных групп, организаций и т.д.), принимающих решения исходя из своих интересов: компромисс, правило большинства и другие понятия группового (социального) выбора. Возможна классификация критериев оптимальности: а) по уровню общности: глобальный критерий оптимального развития в масштабе Земли, социально-экономический критерий, народнохозяйственный критерий, а также «глобальный» и локальные критерии оптимальности в частных системах моделей; б) по временному аспекту: статические и динамические (среди последних — оценивающие развитие от неоптимального к оптимальному состоянию и развитие как смену оптимальных состояний), текущие и финишные; критерии быстродействия (т.е. времени достижения цели); в) по способам формирования критериев — нормативные, социолого-статистические, компромиссные, унитарные и т.д.; г) по типу применяемых измерителей — полезностные, стоимостные, натуральные и др.; д) по способам использования критериев — практические, теоретические, политико-пропагандистские; е) по математической формализации — скалярные и векторные критерии, аддитивные и мультипликативные, интегральные критерии — во временном аспекте и интегральные — в пространственном аспекте и др. Таковы лишь наметки классификации К.о., однако предстоит еще немало сделать для ее отработки, унификации и стандартизации.
[ http://slovar-lopatnikov.ru/]Тематики
EN
DE
FR
Русско-немецкий словарь нормативно-технической терминологии > критерий оптимальности
20 трубопроводная арматура
трубопроводная арматура
Примечание
Техническое устройство, устанавливаемое на трубопроводах и емкостях, предназначенное для управления (перекрытия, регулирования, распределения, смешивания, фазоразделения) потоком рабочей среды (жидких, газообразных, газожидкостных, порошкообразных, суспензий и т.п.) путем изменения площади проходного сечения.
[ ГОСТ Р 52720-2007]
арматура трубопроводная
Устройства, позволяющие регулировать и распределять жидкости и газы, транспортируемые по трубопроводам, и подразделяющиеся на запорную арматуру (краны, задвижки), предохранительную (клапаны), регулирующую (вентили, регуляторы давления), отводную (воздухоотводчики, конденсатоотводчики), аварийную (сигнальные средства) и др.
[СНиП I-2]
трубопроводная арматура
Устройства, устанавливаемые на трубопроводах и обеспечивающие управление (отключение, распределение, регулирование, смешивание и др.) потоками рабочих сред путем изменения проходного сечения
[ПБ 03-108-96]
арматура трубопроводная
Устройства, детали и приборы, устанавливаемые на трубопроводных системах для регулирования и измерения расхода транспортируемых продуктов, а также для поддержания заданного давления в сети
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]
Далее в тексет жирным шрифтом выделены термины, приведенные в ГОСТ Р 52720-2007 "АРМАТУРА ТРУБОПРОВОДНАЯ. Термины и определения". Из определения следует, что арматура управляет потоком рабочей среды путем изменения площади проходного сечения. Управление может заключаться:- в перекрытии потока (например, в запорной или обратной арматуре);
- регулировании параметров рабочей среды посредством изменения расхода (например, в регулирующей или редукционной арматуре);
- распределении потоков рабочей среды (например, в распределительно-смесительной арматуре);
- смешивании потоков рабочей среды (например, в распределительно-смесительной арматуре);
- разделении рабочих сред, находящихся в различных фазовых состояниях (например, в конденсатоотводчике).
- корпусные детали (как правило, корпус и крышка);
- основные детали;
- затвор (запирающий или регулирующий элемент и седло);
- седло;
- запирающий элемент (золотник, шибер и пр.),
- регулирующий элемент (плунжер и др.),
- разрывная мембрана;
- импульсный механизм;
- входной патрубок;
- выходной патрубок;
- привод;
- исполнительный механизм;
- позиционер;
- ручной дублер (узел подрыва);
- сильфон;
- уплотнение (сальниковое, сильфонное);
- проточная часть;
- шпиндель;
- шток;
- чувствительный элемент.
- промышленная ( общепромышленного назначения и специальная ),
- сантехническая,
- лабораторная.
- пароводяная,
- газовая,
- нефтяная,
- энергетическая,
- химическая,
- судовая,
- резервуарная.
- приводная,
- под дистанционное управление,
- с автоматическим управлением,
- с ручным управлением.
- сальниковая,
- мембранная,
- сильфонная,
- шланговая.
- криогенная (рабочие температуры ниже -153 °С),
- для холодильной техники (рабочие температуры от -153 до -70 °С),
- для пониженных температур (рабочие температуры от -70 до -30 °С),
- для средних температур (рабочие температуры до +455 °С),
- для высоких температур (рабочие температуры до +600 °С),
- жаропрочная (рабочие температуры свыше +600 °С).
- чугунная,
- стальная,
- из цветных металлов и т. д.
- проходная и угловая , а также полнопроходная и неполнопроходная.
- муфтовая,
- фланцевая,
- цапковая,
- штуцерная,
- под приварку.
- для установки только на горизонтальных трубопроводах в вертикальном положении,
- на горизонтальных и вертикальных трубопроводах в любом положении,
- только на вертикальных трубопроводах.
-
управляемая
- автоматически действующая (автономная)
- запорная;
- предохранительная;
- регулирующая;
- запорно-регулирующая;
- обратная;
- невозвратно-запорная;
- невозвратно-управляемая;
- распределительно-смесительная (Нрк. распределительная арматура; смесительная арматура);
- спускная (Нрк. дренажная арматура);
- фазоразделительная;
- защитная (Нрк. отключающая);
- редукционная (Нрк. дроссельная арматура);
- контрольная.
- задвижка,
- клапан (Ндп. вентиль),
- кран,
- дисковый затвор (Нрк. заслонка; поворотный затвор; герметический клапан; гермоклапан).
- отсечная арматура (Нрк. быстродействующая арматура)
- регулятор (Ндп. редуктор)
- регулятор давления "до себя"
- регулятор давления "после себя"
- регулятор температуры
- регулятор уровня
- клиновая задвижка
- параллельная задвижка
- шиберная задвижка
- задвижка с выдвижным шпинделем
- задвижка с невыдвижным шпинделем
- шланговая задвижка (Ндп. шланговый затвор)
- шаровой кран
- конусный кран (Нрк. пробковый кран; конический кран)
- цилиндрический кран (Нрк. пробковый кран)
- под приварку,
- муфтовая,
- фланцевая,
- бесфланцевая,
- цапковая,
- штуцерная
- сальниковая,
- бессальниковая,
- сильфонная,
- мембранная
- обратный затвор
- запорный клапан (клапан)
- обратный клапан (Нрк. подъемный клапан)
- невозвратно-запорный клапан
- невозвратно-управляемый клапан
- отключающий клапан
- предохранительный клапан
- предохранительный малоподъемный клапан
- предохранительный полноподъемный клапан
- предохранительный пружинный клапан
- предохранительный клапан прямого действия
- предохранительный рычажно-грузовой клапан
- предохранительный клапан с мембранным чувствительным элементом (предохранительный мембранный клапан)
- блок предохранительных клапанов
- регулирующий клапан (Нрк. исполнительное устройство)
- регулирующий односедельный клапан
- регулирующий двухседельный клапан
- регулирующий клеточный клапан
- регулирующий нормально-закрытый клапан (регулирующий клапан НЗ)
- регулирующий нормально-открытый клапан (регулирующий клапан НО)
- распределительный клапан (Нрк. распределитель)
- смесительный клапан
- регулятор прямого действия
- поплавковый механический конденсатоотводчик (поплавковый конденсатоотводчик)
- термодинамический конденсатоотводчик
- термостатический конденсатоотводчик
- номинальный диаметр DN (Нрк. диаметр условного прохода; условный проход; номинальный размер; условный диаметр; номинальный проход),
- строительная длина L, строительная высота, конструкция и размеры присоединительных патрубков.
- номинальное давление PN (Нрк. условное давление), кгс/см2
- рабочее давление pp
- расчетное давление p
- пробное давление pпр, ph (Нрк. давление опрессовки)
- давление закрытия pз (Нрк. давление обратной посадки )
- давление настройки pн
- давление начала открытия pн.о (Нрк. давление начала трогания; установочное давление)
- давление полного открытия pп.о
- давление управляющее pупр
- противодавление
- расчетная температура
- коэффициент сопротивления ξ (Нрк. коэффициент гидравлического сопротивления)
- условная пропускная способность Kνу, м3/ч
- ход арматуры h
- номинальный ход hу
- текущий ход hi
- относительный ход ħ
- угол поворота
- номинальный угол поворота
- текущий угол поворота
- относительный угол поворота
- герметичность
- герметичность затвора
- класс герметичности арматуры (класс герметичности)
- время срабатывания
- наименьший диаметр седла dс
- эффективный диаметр
- диапазон регулирования: (Нрк. диапазон изменения пропускной способности)
- зона нечувствительности
- нечувствительность
- коэффициент начала кавитации Kc
- коэффициент расхода для газа α1
- коэффициент расхода для жидкости α2
- площадь седла F
- эффективная площадь клапанов для газа α1F
- эффективная площадь клапанов для жидкости α2F
- проходное сечение (Нрк. площадь проходного сечения; проход)
- способность пропускнаяKν: (Нрк. к оэффициент пропускной способности), м3/ч
- пропускная минимальная способность Kνmin
- пропускная начальная способность Kν0
- пропускная относительная способность Kνi/Kνy
- утечка (Нрк. протечка)
- относительная утечка δзат, %
- пропускная характеристика
- пропускная действительная характеристика
- пропускная линейная характеристика Л
- пропускная равнопроцентная характеристика P
- пропускная специальная характеристика C
- кавитационная характеристика
[Павел Лысенко, Интент]
Тематики
- арматура трубопроводная
- сосуды, в т. ч., работающие под давлением
- трубопроводы и их компоненты
EN
- fitting
- pipe fittings
- pipeline accessories
- pipeline fittings
- pipeline valves
- piping accessories
- tube fittings
- valves
DE
FR
Русско-немецкий словарь нормативно-технической терминологии > трубопроводная арматура
Страницы- 1
- 2
См. также в других словарях:
Безопасность информации в автоматизированных системах управления — Состояние защищённости информации с помощью совокупности программных, аппаратно программных средств и методов, а также организационных мер с целью сохранения таких ее качественных характеристик (свойств), как секретность (конфиденциальность),… … Энциклопедия РВСН
Управления уровни — относительные градации совокупностей элементов управления сложной системы (См. Сложная система), сгруппированных и выделенных в соответствии с иерархическим принципом (См. Иерархический принцип). Элементы управления разных уровней… … Большая советская энциклопедия
УПРАВЛЕНИЯ УРОВНИ — совокупность элементов управления сложной системой, сгруппированных и выделенных в соответствии с иерархическим принципом. В сложных системах управления каждая подсистема (подразделение) представляет собой определённый У. у. и решает задачи… … Большой энциклопедический политехнический словарь
Управления автоматизированная система — (АСУ) совокупность экономико математических методов, технических средств (ЭВМ, средств связи, устройств отображения информации, передачи данных и т.д.) и организационных комплексов, обеспечивающих рациональное управление сложным объектом… … Большая советская энциклопедия
Управления система с переменной структурой — Адаптивное управление совокупность методов теории управления, позволяющих синтезировать системы управления, которые имеют возможность изменять параметры регулятора или структуру регулятора в зависимости от изменения параметров объекта управления … Википедия
Управления система с переменной структурой — (СПС) нелинейная система автоматического управления, состоящая из совокупности непрерывных подсистем (называемых структурами) с определённым правилом перехода в процессе функционирования от одной структуры данной совокупности к другой. В… … Большая советская энциклопедия
УПРАВЛЕНИЯ АВТОМАТИЧЕСКОГО ТЕОРИЯ — раздел кибернетики технической, изучающий принципы построения систем автоматич. у правления (САУ) и закономерности протекающих в них процессов. Простейшая и наиболее распространённая частная задача управления поддержание постоянства или изменение … Большой энциклопедический политехнический словарь
Система управления версиями — (от англ. Version Control System, VCS или Revision Control System) программное обеспечение для облегчения работы с изменяющейся информацией. Система управления версиями позволяет хранить несколько версий одного и того же документа, при … Википедия
ГОСТ 20886-85: Организация данных в системах обработки данных. Термины и определения — Терминология ГОСТ 20886 85: Организация данных в системах обработки данных. Термины и определения оригинал документа: 6. База данных БД Data base Совокупность данных, организованных по определенным правилам, предусматривающим общие принципы… … Словарь-справочник терминов нормативно-технической документации
рычагов управления загрузка — Рис. 1. Диаграмма изменения загрузки рычагов управления. рычагов управления загрузка. В системах необратимого бустерного управления и в электродистанционных системах управления необходимо применение искусственной загрузки рычагов управления (РУ)… … Энциклопедия «Авиация»
рычагов управления загрузка — Рис. 1. Диаграмма изменения загрузки рычагов управления. рычагов управления загрузка. В системах необратимого бустерного управления и в электродистанционных системах управления необходимо применение искусственной загрузки рычагов управления (РУ)… … Энциклопедия «Авиация»
 18+© Академик, 2000-2024
18+© Академик, 2000-2024- Обратная связь: Техподдержка, Реклама на сайте
Экспорт словарей на сайты, сделанные на PHP, Joomla, Drupal, WordPress, MODx.
Перевод: с русского на немецкий
с немецкого на русский- С немецкого на:
- Русский
- С русского на:
- Все языки
- Английский
- Греческий
- Немецкий
- Французский