-
41 host equipment
главное оборудование
Любое оборудование, обладающее полным набором функциональности для пользователя, если оно не подключено к радиосвязному оборудованию, и для которого это радиооборудование обеспечивает дополнительную функциональность, и для которого подключение к этой радиоаппаратуре необходимо для обеспечения такой дополнительной функциональности, и в котором физически монтируется приемопередающая часть радиоаппаратуры. (МСЭ-Т K.48).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
3.3 основное оборудование (host equipment): Любое ТС PC, содержащее приемно-передающее устройство (устройства), выполняющее установленные функции без подключения к нему других ТС PC, для которого подключение других ТС PC позволяет обеспечить выполнение дополнительных функций, причем другие ТС PC не могут выполнять дополнительные функции без подключения к основному оборудованию.
Примечание - К основному оборудованию относят любое ТС PC, конструкция которого обеспечивает механическое размещение значительного числа «радиомодулей», выполняющих определенные функции, причем размещение дополнительных «радиомодулей» не влияет на выполнение основным оборудованием установленных функций.
Источник: ГОСТ Р 52459.1-2009: Совместимость технических средств электромагнитная. Технические средства радиосвязи. Часть 1. Общие технические требования и методы испытаний оригинал документа
3.3 основное оборудование (host equipment): Любое оборудование, обеспечивающее механическое размещение приемопередающих устройств, выполняющее установленные функции без подключения к нему беспроводного телефона или аналогичного оборудования радиосвязи, и для которого подключение данного радиооборудования позволяет обеспечить выполнение дополнительных функций, причем данное оборудование не может выполнять установленные функции без подключения к основному оборудованию.
Источник: ГОСТ Р 52459.6-2009: Совместимость технических средств электромагнитная. Технические средства радиосвязи. Часть 6. Частные требования к оборудованию цифровой усовершенствованной беспроводной связи (DECT) оригинал документа
3.3 основное оборудование (host equipment): Любое оборудование, выполняющее установленные функции без подключения к подвижной земной станции, к которому подвижная земная станция должна быть подключена для обеспечения дополнительных функциональных возможностей.
Источник: ГОСТ Р 52459.20-2009: Совместимость технических средств электромагнитная. Технические средства радиосвязи. Часть 20. Частные требования к земным станциям подвижной спутниковой службы оригинал документа
3.4 основное оборудование (host equipment): Любое радиооборудование:
- выполняющее установленные функции без подключения к нему беспроводных телефонов или аналогичного радиооборудования;
- для которого подключение беспроводных телефонов или аналогичного радиооборудования позволяет обеспечить выполнение дополнительных функций;
- обеспечивающее выполнение дополнительных функций подключаемыми беспроводными телефонами или аналогичным радиооборудованием;
- обеспечивающее механическое размещение подключаемых беспроводных телефонов или аналогичного радиооборудования.
Источник: ГОСТ Р 52459.10-2009: Совместимость технических средств электромагнитная. Технические средства радиосвязи. Часть 10. Частные требования к оборудованию беспроводных телефонов первого и второго поколений оригинал документа
Англо-русский словарь нормативно-технической терминологии > host equipment
-
42 WDR
- расширенный динамический диапазон
- законодательство, регулирующее сброс и удаление промышленных отходов
законодательство, регулирующее сброс и удаление промышленных отходов
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
расширенный динамический диапазон
рендеринг в широком динамическом диапазоне
1.Применяется в новом стандарте для TIFF-файлов, предложенном фирмой Leaf Systems. Для каждого из основных RGB-цветов выделяется 16 бит, т.е. общая разрядность составляет 48 бит. Таким образом, на каждый цвет приходится 65536 оттенков, что позволяет пользователям оперировать с такими деталями изображений, которые обычно теряются при восьмибитовом сканировании на каждый из основных цветов.
2. В применении к 3D графике суть HDR заключается в описании интенсивности и цвета реальными физическими величинами.
Динамического диапазона модели описания RGB недостаточно для представления изображений, которые человек способен видеть в реальности, эта модель значительно уменьшает возможные значения интенсивности света в верхней и нижней части диапазона.
HDR рендеринг позволяет изменять экспозицию уже после того, как мы отрендерили изображение. Дает возможность имитировать эффект адаптации человеческого зрения (перемещение из ярких открытых пространств в темные помещения и наоборот), позволяет выполнять физически правильное освещение, а также является унифицированным решением для применения эффектов постобработки (glare, flares, bloom, motion blur). Алгоритмы обработки изображения, цветокоррекцию, гамма-коррекцию, motion blur, bloom и другие методы постобработки качественней выполнять в HDR представлении.
[ http://www.morepc.ru/dict/]
расширенный динамический диапазон
Функция, позволяющая качественно отображать в одном кадре засвеченные и затемнённые участки. Основана на комбинации двух кадров, снятых в различных режимах.
[ http://www.spezvideo.ru/glossary/W/]Тематики
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > WDR
-
43 centralized UPS
ИБП для централизованных систем питания
ИБП для централизованного питания нагрузок
-
[Интент]ИБП для централизованных систем питания
А. П. Майоров
Для многих предприятий всесторонняя защита данных имеет жизненно важное значение. Кроме того, есть виды деятельности, в которых прерывания подачи электроэнергии не допускаются даже на доли секунды. Так работают расчетные центры банков, больницы, аэропорты, центры обмена трафиком между различными сетями. В такой же степени критичны к электропитанию телекоммуникационное оборудование, крупные узлы Интернет, число ежедневных обращений к которым исчисляется десятками и сотнями тысяч. Третья часть обзора по ИБП посвящена оборудованию, предназначенному для обеспечения питания особо важных объектов.
Централизованные системы бесперебойного питания применяют в тех случаях, когда прерывание подачи электроэнергии недопустимо для работы большинства единиц оборудования, составляющих одну информационную или технологическую систему. Как правило, проблемы питания рассматривают в рамках единого проекта наряду со многими другими подсистемами здания, поскольку они требуют вложения значительных средств и увязки с силовой электропроводкой, коммутационным электрооборудованием и аппаратурой кондиционирования. Изначально системы бесперебойного питания рассчитаны на долгие годы эксплуатации, их срок службы можно сравнить со сроком службы кабельных подсистем здания и основного компьютерного оборудования. За 15—20 лет функционирования предприятия оснащение его рабочих станций обновляется три-четыре раза, несколько раз изменяется планировка помещений и производится их ремонт, но все эти годы система бесперебойного питания должна работать безотказно. Для ИБП такого класса долговечность превыше всего, поэтому в их технических спецификациях часто приводят значение важнейшего технического показателя надежности — среднего времени наработки на отказ (Mean Time Before Failure — MTBF). Во многих моделях с ИБП оно превышает 100 тыс. ч, в некоторых из них достигает 250 тыс. ч (т. е. 27 лет непрерывной работы). Правда, сравнивая различные системы, нужно учитывать условия, для которых этот показатель задан, и к предоставленным цифрам относиться осторожно, поскольку условия работы оборудования разных производителей неодинаковы.
Батареи аккумуляторов
К сожалению, наиболее дорогостоящий компонент ИБП — батарея аккумуляторов так долго работать не может. Существует несколько градаций качества батарей, которые различаются сроком службы и, естественно, ценой. В соответствии с принятой два года назад конвенцией EUROBAT по среднему сроку службы батареи разделены на четыре группы:
10+ — высоконадежные,
10 — высокоэффективные,
5—8 — общего назначения,
3—5 — стандартные коммерческие.Учитывая исключительно жесткую конкуренцию на рынке ИБП малой мощности, производители стремятся снизить до минимума начальную стоимость своих моделей, поэтому часто комплектуют их самыми простыми батареями. Применительно к этой группе продуктов такой подход оправдан, поскольку упрощенные ИБП изымают из обращения вместе с защищаемыми ими персональными компьютерами. Впервые вступающие на этот рынок производители, пытаясь оттеснить конкурентов, часто используют в своих интересах неосведомленность покупателей о проблеме качества батарей и предлагают им сравнимые по остальным показателям модели за более низкую цену. Имеются случаи, когда партнеры крупной фирмы комплектуют ее проверенные временем и признанные рынком модели ИБП батареями, произведенными в развивающихся странах, где контроль за технологическим процессом ослаблен, а, значит, срок службы батарей меньше по сравнению с "кондиционными" изделиями. Поэтому, подбирая для себя ИБП, обязательно поинтересуйтесь качеством батареи и ее производителем, избегайте продукции неизвестных фирм. Следование этим рекомендациям сэкономит вам значительные средства при эксплуатации ИБП.
Все сказанное еще в большей степени относится к ИБП высокой мощности. Как уже отмечалось, срок службы таких систем исчисляется многими годами. И все же за это время приходится несколько раз заменять батареи. Как это ни покажется странным, но расчеты, основанные на ценовых и качественных параметрах батарей, показывают, что в долгосрочной перспективе наиболее выгодны именно батареи высшего качества, несмотря на их первоначальную стоимость. Поэтому, имея возможность выбора, устанавливайте батареи только "высшей пробы". Гарантированный срок службы таких батарей приближается к 15 годам.
Не менее важный аспект долговечности мощных систем бесперебойного питания — условия эксплуатации аккумуляторных батарей. Чтобы исключить непредсказуемые, а следовательно, часто приводящие к аварии перерывы в подаче электропитания, абсолютно все включенные в приведенную в статье таблицу модели оснащены самыми совершенными схемами контроля за состоянием батарей. Не мешая выполнению основной функции ИБП, схемы мониторинга, как правило, контролируют следующие параметры батареи: зарядный и разрядный токи, возможность избыточного заряда, рабочую температуру, емкость.
Кроме того, с их помощью рассчитываются такие переменные, как реальное время автономной работы, конечное напряжение зарядки в зависимости от реальной температуры внутри батареи и др.
Подзарядка батареи происходит по мере необходимости и в наиболее оптимальном режиме для ее текущего состояния. Когда емкость батареи снижается ниже допустимого предела, система контроля автоматически посылает предупреждающий сигнал о необходимости ее скорой замены.
Топологические изыски
Долгое время специалисты по системам электропитания руководствовались аксиомой, что мощные системы бесперебойного питания должны иметь топологию on-line. Считается, что именно такая топология гарантирует защиту от всех нарушений на линиях силового питания, позволяет фильтровать помехи во всем частотном диапазоне, обеспечивает на выходе чистое синусоидальное напряжение с номинальными параметрами. Однако за качество электропитания приходится платить повышенным выделением тепловой энергии, сложностью электронных схем, а следовательно, потенциальным снижением надежности. Но, несмотря на это, за многолетнюю историю выпуска мощных ИБП были разработаны исключительно надежные аппараты, способные работать в самых невероятных условиях, когда возможен отказ одного или даже нескольких узлов одновременно. Наиболее важным и полезным элементом мощных ИБП является так называемый байпас. Это обходной путь подачи энергии на выход в случае ремонтных и профилактических работ, вызванных отказом некоторых компонентов систем или возникновением перегрузки на выходе. Байпасы бывают ручными и автоматическими. Они формируются несколькими переключателями, поэтому для их активизации требуется некоторое время, которое инженеры постарались снизить до минимума. И раз уж такой переключатель был создан, то почему бы не использовать его для снижения тепловыделения в то время, когда питающая сеть пребывает в нормальном рабочем состоянии. Так появились первые признаки отступления от "истинного" режима on-line.
Новая топология отдаленно напоминает линейно-интерактивную. Устанавливаемый пользователем системы порог срабатывания определяет момент перехода системы в так называемый экономный режим. При этом напряжение из первичной сети поступает на выход системы через байпас, однако электронная схема постоянно следит за состоянием первичной сети и в случае недопустимых отклонений мгновенно переключается на работу в основном режиме on-line.
Подобная схема применена в ИБП серии Synthesis фирмы Chloride (Сети и системы связи, 1996. № 10. С. 131), механизм переключения в этих устройствах назван "интеллектуальным" ключом. Если качество входной линии укладывается в пределы, определяемые самим пользователем системы, аппарат работает в линейно-интерактивном режиме. При достижении одним из контролируемых параметров граничного значения система начинает работать в нормальном режиме on-line. Конечно, в этом режиме система может работать и постоянно.
За время эксплуатации системы отход от исходной аксиомы позволяет экономить весьма значительные средства за счет сокращения тепловыделения. Сумма экономии оказывается сопоставимой со стоимостью оборудования.
Надо отметить, что от своих исходных принципов отошла еще одна фирма, ранее выпускавшая только линейно-интерактивные ИБП и ИБП типа off-line сравнительно небольшой мощности. Теперь она превысила прежний верхний предел мощности своих ИБП (5 кВА) и построила новую систему по топологии on-line. Я имею в виду фирму АРС и ее массив электропитания Simmetra (Сети и системы связи. 1997. № 4. С. 132). Создатели попытались заложить в систему питания те же принципы повышения надежности, которые применяют при построении особо надежной компьютерной техники. В модульную конструкцию введена избыточность по отношению к управляющим модулям и батареям. В любом из трех выпускаемых шасси из отдельных модулей можно сформировать нужную на текущий момент систему и в будущем наращивать ее по мере надобности. Суммарная мощность самого большого шасси достигает 16 кВА. Еще рано сравнивать эту только что появившуюся систему с другими включенными в таблицу. Однако факт появления нового продукта в этом исключительно устоявшемся секторе рынка сам по себе интересен.
Архитектура
Суммарная выходная мощность централизованных систем бесперебойного питания может составлять от 10—20 кВА до 200—300 МВА и более. Соответственно видоизменяется и структура систем. Как правило, она включают в себя несколько источников, соединенных параллельно тем или иным способом. Аппаратные шкафы устанавливают в специально оборудованных помещениях, где уже находятся распределительные шкафы выходного напряжения и куда подводят мощные входные силовые линии электропитания. В аппаратных помещениях поддерживается определенная температура, а за функционированием оборудования наблюдают специалисты.
Многие реализации системы питания для достижения необходимой надежности требуют совместной работы нескольких ИБП. Существует ряд конфигураций, где работают сразу несколько блоков. В одних случаях блоки можно добавлять постепенно, по мере необходимости, а в других — системы приходится комплектовать в самом начале проекта.
Для повышения суммарной выходной мощности используют два варианта объединения систем: распределенный и централизованный. Последний обеспечивает более высокую надежность, но первый более универсален. Блоки серии EDP-90 фирмы Chloride допускают объединение двумя способами: и просто параллельно (распределенный вариант), и с помощью общего распределительного блока (централизованный вариант). При выборе способа объединения отдельных ИБП необходим тщательный анализ структуры нагрузки, и в этом случае лучше всего обратиться за помощью к специалистам.
Применяют параллельное соединение блоков с централизованным байпасом, которое используют для повышения общей надежности или увеличения общей выходной мощности. Число объединяемых блоков не должно превышать шести. Существуют и более сложные схемы с избыточностью. Так, например, чтобы исключить прерывание подачи питания во время профилактических и ремонтных работ, соединяют параллельно несколько блоков с подключенными к отдельному ИБП входными линиями байпасов.
Особо следует отметить сверхмощные ИБП серии 3000 фирмы Exide. Суммарная мощность системы питания, построенная на модульных элементах этой серии, может достигать нескольких миллионов вольт-ампер, что сравнимо с номинальной мощностью генераторов некоторых электростанций. Все компоненты серии 3000 без исключения построены на модульном принципе. На их основе можно создать особо мощные системы питания, в точности соответствующие исходным требованиям. В процессе эксплуатации суммарную мощность систем можно наращивать по мере увеличения нагрузки. Однако следует признать, что систем бесперебойного питания такой мощности в мире не так уж много, их строят по специальным контрактам. Поэтому серия 3000 не включена в общую таблицу. Более подробные данные о ней можно получить на Web-узле фирмы Exide по адресу http://www.exide.com или в ее московском представительстве.
Важнейшие параметры
Для систем с высокой выходной мощностью очень важны показатели, которые для менее мощных систем не имеют первостепенного значения. Это, например, КПД — коэффициент полезного действия (выражается либо действительным числом меньше единицы, либо в процентах), показывающий, какая часть активной входной мощности поступает к нагрузке. Разница значений входной и выходной мощности рассеивается в виде тепла. Чем выше КПД, тем меньше тепловой энергии выделяется в аппаратной комнате и, значит, для поддержания нормальных рабочих условий требуется менее мощная система кондиционирования.
Чтобы представить себе, о каких величинах идет речь, рассчитаем мощность, "распыляемую" ИБП с номинальным значением на выходе 8 МВт и с КПД, равным 95%. Такая система будет потреблять от первичной силовой сети 8,421 МВт — следовательно, превращать в тепло 0,421 МВт или 421 кВт. При повышении КПД до 98% при той же выходной мощности рассеиванию подлежат "всего" 163 кВт. Напомним, что в данном случае нужно оперировать активными мощностями, измеряемыми в ваттах.
Задача поставщиков электроэнергии — подавать требуемую мощность ее потребителям наиболее экономным способом. Как правило, в цепях переменного тока максимальные значения напряжения и силы тока из-за особенностей нагрузки не совпадают. Из-за этого смещения по фазе снижается эффективность доставки электроэнергии, поскольку при передаче заданной мощности по линиям электропередач, через трансформаторы и прочие элементы систем протекают токи большей силы, чем в случае отсутствия такого смещения. Это приводит к огромным дополнительным потерям энергии, возникающим по пути ее следования. Степень сдвига по фазе измеряется не менее важным, чем КПД, параметром систем питания — коэффициентом мощности.
Во многих странах мира существуют нормы на допустимое значение коэффициента мощности систем питания и тарифы за электроэнергию нередко зависят от коэффициента мощности потребителя. Суммы штрафов за нарушение нормы оказываются настольно внушительными, что приходится заботиться о повышении коэффициента мощности. С этой целью в ИБП встраивают схемы, которые компенсируют сдвиг по фазе и приближают значение коэффициента мощности к единице.
На распределительную силовую сеть отрицательно влияют и нелинейные искажения, возникающие на входе блоков ИБП. Почти всегда их подавляют с помощью фильтров. Однако стандартные фильтры, как правило, уменьшают искажения только до уровня 20—30%. Для более значительного подавления искажений на входе систем ставят дополнительные фильтры, которые, помимо снижения величины искажений до нескольких процентов, повышают коэффициент мощности до 0,9—0,95. С 1998 г. встраивание средств компенсации сдвига по фазе во все источники электропитания компьютерной техники в Европе становится обязательным.
Еще один важный параметр мощных систем питания — уровень шума, создаваемый такими компонентами ИБП, как, например, трансформаторы и вентиляторы, поскольку их часто размещают вместе в одном помещении с другим оборудованием — там где работает и персонал.
Чтобы представить себе, о каких значениях интенсивности шума идет речь, приведем для сравнения такие примеры: уровень шума, производимый шелестом листвы и щебетанием птиц, равен 40 дБ, уровень шума на центральной улице большого города может достигать 80 дБ, а взлетающий реактивный самолет создает шум около 100 дБ.
Достижения в электронике
Мощные системы бесперебойного электропитания выпускаются уже более 30 лет. За это время бесполезное тепловыделение, объем и масса их сократились в несколько раз. Во всех подсистемах произошли и значительные технологические изменения. Если раньше в инверторах использовались ртутные выпрямители, а затем кремниевые тиристоры и биполярные транзисторы, то теперь в них применяются высокоскоростные мощные биполярные транзисторы с изолированным затвором (IGBT). В управляющих блоках аналоговые схемы на дискретных компонентах сначала были заменены на цифровые микросхемы малой степени интеграции, затем — микропроцессорами, а теперь в них установлены цифровые сигнальные процессоры (Digital Signal Processor — DSP).
В системах питания 60-х годов для индикации их состояния использовались многочисленные аналоговые измерительные приборы. Позднее их заменили более надежными и информативными цифровыми панелями из светоизлучающих диодов и жидкокристаллических индикаторов. В наше время повсеместно используют программное управление системами питания.
Еще большее сокращение тепловых потерь и общей массы ИБП дает замена массивных трансформаторов, работающих на частоте промышленной сети (50 или 60 Гц), высокочастотными трансформаторами, работающими на ультразвуковых частотах. Между прочим, высокочастотные трансформаторы давно применяются во внутренних источниках питания компьютеров, а вот в ИБП их стали устанавливать сравнительно недавно. Применение IGBT-приборов позволяет строить и бестрансформаторные инверторы, при этом внутреннее построение ИБП существенно меняется. Два последних усовершенствования применены в ИБП серии Synthesis фирмы Chloride, отличающихся уменьшенным объемом и массой.
Поскольку электронная начинка ИБП становится все сложнее, значительную долю их внутреннего объема теперь занимают процессорные платы. Для радикального уменьшения суммарной площади плат и изоляции их от вредных воздействий электромагнитных полей и теплового излучения используют электронные компоненты для так называемой технологии поверхностного монтажа (Surface Mounted Devices — SMD) — той самой, которую давно применяют в производстве компьютеров. Для защиты электронных и электротехнических компонентов имеются специальные внутренние экраны.
***
Со временем серьезный системный подход к проектированию материальной базы предприятия дает значительную экономию не только благодаря увеличению срока службы всех компонентов "интегрированного интеллектуального" здания, но и за счет сокращения расходов на электроэнергию и текущее обслуживание. Использование централизованных систем бесперебойного питания в пересчете на стоимость одного рабочего места дешевле, чем использование маломощных ИБП для рабочих станций и даже ИБП для серверных комнат. Однако, чтобы оценить это, нужно учесть все факторы установки таких систем.
Предположим, что предприятие свое помещение арендует. Тогда нет никакого смысла разворачивать дорогостоящую систему централизованного питания. Если через пять лет руководство предприятия не намерено заниматься тем же, чем занимается сегодня, то даже ИБП для серверных комнат обзаводиться нецелесообразно. Но если оно рассчитывает на то, что производство будет держаться на плаву долгие годы и решило оснастить принадлежащее им здание системой бесперебойного питания, то для выбора такой системы нужно воспользоваться услугами специализированных фирм. Сейчас их немало и в России. От этих же фирм можно получить информацию о так называемых системах гарантированного электропитания, в которые включены дизельные электрогенераторы и прочие, более экзотические источники энергии.
Нам же осталось рассмотреть лишь методы управления ИБП, что мы и сделаем в одном из следующих номеров нашего журнала
[ http://www.ccc.ru/magazine/depot/97_07/read.html?0502.htm]Тематики
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > centralized UPS
-
44 RS-485
интерфейс RS-485
Промышленный стандарт для полудуплексной передачи данных. Позволяет объединять в сеть протяженностью 1200 м до 32 абонентов.
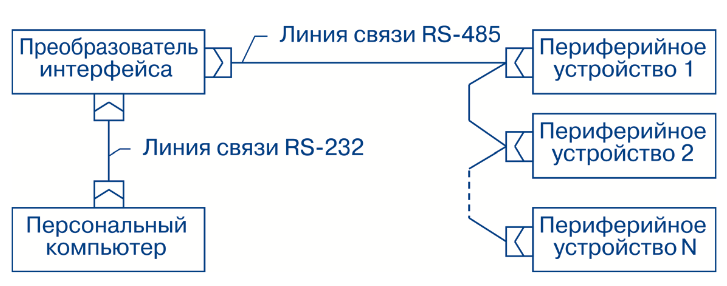
[ http://www.morepc.ru/dict/]Интерфейс RS-485 - широко распространенный высокоскоростной и помехоустойчивый промышленный последовательный интерфейс передачи данных. Практически все современные компьютеры в промышленном исполнении, большинство интеллектуальных датчиков и исполнительных устройств, программируемые логические контроллеры наряду с традиционным интерфейсом RS-232 содержат в своем составе ту или иную реализацию интерфейса RS-485.
Интерфейс RS-485 основан на стандарте EIA RS-422/RS-485.
К сожалению, полноценного эквивалентного российского стандарта не существует, поэтому в данном разделе предлагаются некоторые рекомендации по применению интерфейса RS-485.
Традиционный интерфейс RS-232 в промышленной автоматизации применяется достаточно редко. Сигналы этого интерфейса передаются перепадами напряжения величиной (3...15) В, поэтому длина линии связи RS-232, как правило, ограничена расстоянием в несколько метров из-за низкой помехоустойчивости. Интерфейс RS-232 имеется в каждом PC–совместимом компьютере, где используется в основном для подключения манипулятора типа “мышь”, модема, и реже – для передачи данных на небольшое расстояние из одного компьютера в другой. Передача производится последовательно, пословно, каждое слово длиной (5...8) бит предваряют стартовым битом
и заканчивают необязательным битом четности и стоп-битами.
Интерфейс RS-232 принципиально не позволяет создавать сети, так как соединяет только 2 устройства (так называемое соединение “точка - точка”).

Сигналы интерфейса RS-485 передаются дифференциальными перепадами напряжения величиной (0,2...8) В, что обеспечивает высокую помехоустойчивость и общую длину линии связи до 1 км (и более с использованием специальных устройств – повторителей). Кроме того, интерфейс RS-485 позволяет создавать сети путем параллельного подключения многих устройств к одной физической линии (так называемая “мультиплексная шина”).
В обычном PC-совместимом персональном компьютере (не промышленного исполнения) этот интерфейс отсутствует, поэтому необходим специальный адаптер - преобразователь интерфейса RS-485/232.
Наша компания рекомендует использовать полностью автоматические преобразователи интерфейса, не требующие сигнала управления передатчиком. Такие преобразователи, как правило, бывают двух видов:- преобразователи, требующие жесткого указания скорости обмена и длины передаваемого слова (с учетом стартовых, стоповых бит и бита четности) для расчета времени окончания передачи: например, преобразователь ADAM-4520 производства компании Advantech. Все параметры задаются переключателями в самом преобразователе, причем для задания этих параметров корпус преобразователя необходимо разобрать;
- преобразователи на основе технологий “Self Tuner” и им подобных, не требующие никаких указаний вообще, и, соответственно, не имеющие никаких органов управления: например, преобразователь I-7520 производства компании ICP DAS. Данный преобразователь предпочтительнее для использования в сетях с приборами МЕТАКОН.
В автоматических преобразователях выходы интерфейса RS-485 обычно имеют маркировку “DATA+” и “DATA-“. В I-7520 и ADAM-4520 вывод “DATA+” функционально эквивалентен выводу “A” регулятора МЕТАКОН, вывод “DATA-“ - выводу “B”.
Устройства, подключаемые к интерфейсу RS-485, характеризуются важным параметром по входу приемопередатчика: “единица нагрузки” (“Unit Load” - UL). По стандарту в сети допускается использование до 32 единиц нагрузки, т.е. до 32 устройств, каждое из которых нагружает линию в 1 UL. В настоящее время существуют микросхемы приемопередатчиков с характеристикой менее 1 UL, например - 0,25 UL. В этом случае количество физи
чески подключенных к линии устройств можно увеличить, но суммарное количество UL в одной линии не должно превышать 32.
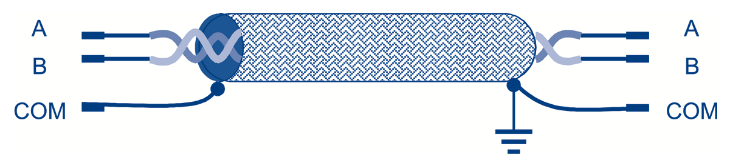
В качестве линии связи используется экранированная витая пара с волновым сопротивлением ≈120 Ом. Для защиты от помех экран (оплетка) витой пары заземляется в любой точке, но только один раз: это исключает протекание больших токов по экрану из-за неравенства потенциалов “земли”. Выбор точки, в которой следует заземлять кабель, не регламентируется стандартом, но, как правило, экран линии связи заземляют на одном из ее концов.
Устройства к сети RS-485 подключаются последовательно, с соблюдением полярности контактов A и B:
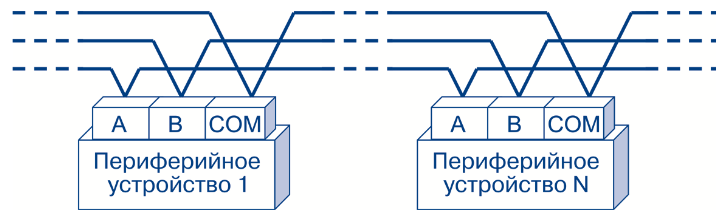
Как видно из рисунка, длинные ответвления (шлейфы) от магистрали до периферийных устройств не допускаются. Стандарт исходит из предположения, что длина шлейфа равна нулю, но на практике этого достичь невозможно (небольшой шлейф всегда имеется внутри любого периферийного устройства: от клеммы
до микросхемы приемопередатчика).
Качество витой пары оказывает большое влияние на дальность связи и максимальную скорость обмена в линии. Существуют специальные методики расчета допустимых скоростей обмена и максимальной длины линии связи, основанные на паспортных параметрах кабеля (волновое сопротивление, погонная емкость, активное сопротивление) и микросхем приемопередатчиков (допустимые искажения фронта сигнала). Но на относительно низких скоростях обмена (до 19200 бит/с) основное влияние на допустимую длину линии связи оказывает активное сопротивление кабеля. Опытным путем установлено, что на расстояниях до 600 м допускается использовать кабель с медной жилой сечением 0,35 мм (например, кабель КММ 2х0,35), на большие расстояния сечение кабеля необходимо пропорционально увеличить. Этот эмпирический результат хорошо согласуется с результатами, полученными расчетными методами.
Даже для скоростей обмена порядка 19200 бит/с кабель уже можно считать длинной линией, а любая длинная линия для исключения помех от отраженного сигнала должна быть согласована на концах. Для согласования используются резисторы
сопротивлением 120 Ом (точнее, с сопротивлением, равным волновому сопротивлению кабеля, но, как правило, используемые витые пары имеют волновое сопротивление около 120 Ом и точно подбирать резистор нет необходимости) и мощностью не менее 0,25 Вт – так называемый “терминатор”. Терминаторы устанавливаются на обоих концах линии связи, между контактами A и B витой пары.
В сетях RS-485 часто наблюдается состояние, когда все подключенные к сети устройства находятся в пассивном состоянии, т.е. в сети отсутствует передача и все приемопередатчики “слушают” сеть. В этом случае приемопередатчики не могут корректно распознать никакого устойчивого логического состояния в линии, а непосредственно после передачи все приемопередатчики распознают в линии состояние, соответствующее последнему переданному биту, что эквивалентно помехе в линии связи. На эту проблему не так часто обращают внимания, борясь с ее последствиями программными методами, но тем не менее решить ее аппаратно несложно. Достаточно с помощью специальных цепей смещения создать в линии потенциал, эквивалентный состоянию отсутствия передачи (так называемое состояние “MARK”: передатчик включен, но передача не ведется). Цепи смещения и терминатор реализованы в преобразователе I-7520. Для корректной работы цепей смещения необходимо наличие двух терминаторов в линии связи.
В сети RS-485 возможна конфликтная ситуация, когда 2 и более устройства начинают передачу одновременно. Это происходит в следующих случаях:
• в момент включения питания из-за переходных процессов устройства кратковременно могут находится в режиме передачи;
• одно или более из устройств неисправно;
• некорректно используется так называемый “мульти-мастерный” протокол, когда инициаторами обмена могут быть несколько устройств.
В первых двух случаях быстро устранить конфликт невозможно, что теоретически может привести к перегреву и выходу из строя приемопередатчиков RS-485. К счастью, такая ситуация предусмотрена стандартом и дополнительная защита приемопередатчика обычно не требуется. В последнем случае необходимо предусмотреть программное разделение канала между устройствами-инициаторами обмена, так как в любом случае для нормального функционирования линия связи может одновременно предоставляться только одному передатчику.
[ http://www.metodichka-contravt.ru/?id=3937]Тематики
EN
Англо-русский словарь нормативно-технической терминологии > RS-485
-
45 programmable logic controller
контроллер с программируемой логикой
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего. Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы. Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7. Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series. Рис. 4. Резервированный контроллер FCP270.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA). Рис. 5. Контроллер AC800M.
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > programmable logic controller
46 oligopolistic experiments
олигопольные эксперименты
Машинные или человеко-машинные эксперименты, воспроизводящие ситуацию олигополии; проводятся в исследовательских и дидактических целях. Строятся в форме деловой игры, в которой участники принимают для каждого периода (такта игры) решения о характеристиках «выпускаемых» ими товаров, объемах производства, затратах на рекламу, о ценах и инвестициях. Результаты решений с помощью компьютера представляются в виде планов, балансов доходов и убытков, обзоров состояния рынка и других расчетов. Полученная информация служит для принятия решений в последующих периодах и т.д. Множество испытаний (проигрываний) позволяет анализировать мотивы и эффективность экономического поведения участников игры. О.э. дают возможность верифицировать экономические теории и гипотезы, касающиеся, например, инвестиционной или торговой политики фирм. Для иллюстрации остановимся на одном простейшем О.э. Имеются три «фирмы» поставщика однородного товара и множество потребителей. Формулируется модель эксперимента, в которой цена товара выступает как функция объема предложения P = 20 — (X1 + X2 + X3), где P — цена, X1 + X2 + X3 — соответственно, сумма предложений трех фирм; 20 — некоторый заданный параметр. Для упрощения принимается, что фирмы не имеют издержек. Тогда прибыль — Gi = ? pxi, i = 1, 2, 3. Задача каждой фирмы состоит в максимизации целевой функции Gi ® max. Фирму представляет группа студентов, принимающих решения об объеме «продаж». Решения принимаются каждой группой независимо от других, обмен информацией (или, проще, сговор между фирмами) исключен. Далее проигрывается серия испытаний, результаты которых фиксируются в таблице. Отсюда видно, что, например, в первом испытании третья фирма «выбросила на рынок» 10 единиц товара, а на деле свела прибыли всех фирм к нулю (в том числе и свою собственную). А вот в четвертом испытании та же фирма получила высокую прибыль. Таблица позволяет судить о качестве решений участников эксперимента, регистрация пояснений о причинах принятия тех или иных решений — анализировать мотивы их «экономического поведения». Разумеется, это лишь крайне упрощенный пример. О.э. усложняются введением показателей издержек и производственных мощностей для каждой фирмы, вводятся параметры инвестиций (тогда производственные мощности могут изменяться в определенных пределах). Строятся модели рынков, включающие не только поставщиков, но и потребителей и т.д. В ряде случаев на основании наблюдений в ходе эксперимента строится математическая модель, которая затем проигрывается на компьютере. Такое соединение натурного и имитационного эксперимента позволяет углублять анализ явлений, проверять выводы и гипотезы.
[ http://slovar-lopatnikov.ru/]Тематики
EN
Англо-русский словарь нормативно-технической терминологии > oligopolistic experiments
47 Intel vPro
платформа vPro
Платформа корпорации Intel для корпоративных ПК.
В ее состав входят новый двухъядерный процессор Core 2 Duo, чипсет Intel Q965 Express с интегрированной графикой и гигабитный сетевой контроллер Intel 82566DM. По своим характеристикам система на базе vPro готова к работе с 64-разрядной версией операционной системы Windows Vista.
Наиболее интересные особенности платформы связаны с технологиями аппаратной виртуализации VT и удаленного управления AMT (Active Management Technology), реализуя возможности которых производители систем и разработчики программного обеспечения создают новые модели использования ПК.
Помимо возможности одновременно запускать несколько операционных систем на одном компьютере, технология VT позволяет решать ряд вопросов в области безопасности. Благодаря ей в системе можно создавать так называемые виртуальные устройства — разделы, где под управлением легковесной служебной операционной системы могут быть запущены такие программные средства, как, например, сетевые экраны. Таким образом, служебное приложение будет работать абсолютно незаметно для пользователя и его операционной системы.
Запуск агента безопасности в среде, независимой от основной операционной системы, позволяет добиться его постоянной работоспособности и большей защищенности от атак.
Вторая технология, реализованная в vPro, — AMT — позволяет администратору получить удаленный доступ даже к неработающему пользовательскому компьютеру. По словам регионального директора Intel в странах СНГ Дмитрия Конаша, переход на vPro приведет к существенной экономии на управлении ИТ-инфраструктурой за счет упрощения учета парка персональных компьютеров, поскольку сведения обо всех подключенных к сети ПК (информация о конфигурации системы хранится в специальном разделе энергонезависимой памяти) будут собираться автоматически, а также за счет сокращения количества визитов ИТ-персонала на рабочие места пользователей в случае каких-либо сбоев.
Большинство проблем, в том числе возникших из-за краха операционной системы, администратор может полностью решить удаленно, поскольку имеет возможность включить питание ПК, дав команду по локальной сети, получить доступ к BIOS, прочитать журнал событий и восстановить ОС.
Такая проблема, как поломка жесткого диска, также теоретически потребует только одного визита: при помощи средств диагностики администратор определит причину неисправности, модель жесткого диска и придет к пользовательскому ПК уже с необходимым запасным устройством.
С точки зрения пользователей, процедуры текущего обслуживания настольных ПК должны доставлять меньше хлопот, поскольку администраторы могут назначать обновление программного обеспечения на ночное время вместо того, чтобы делать это в разгар рабочего дня.
[ http://www.morepc.ru/dict/]Тематики
EN
Англо-русский словарь нормативно-технической терминологии > Intel vPro
48 vPro
платформа vPro
Платформа корпорации Intel для корпоративных ПК.
В ее состав входят новый двухъядерный процессор Core 2 Duo, чипсет Intel Q965 Express с интегрированной графикой и гигабитный сетевой контроллер Intel 82566DM. По своим характеристикам система на базе vPro готова к работе с 64-разрядной версией операционной системы Windows Vista.
Наиболее интересные особенности платформы связаны с технологиями аппаратной виртуализации VT и удаленного управления AMT (Active Management Technology), реализуя возможности которых производители систем и разработчики программного обеспечения создают новые модели использования ПК.
Помимо возможности одновременно запускать несколько операционных систем на одном компьютере, технология VT позволяет решать ряд вопросов в области безопасности. Благодаря ей в системе можно создавать так называемые виртуальные устройства — разделы, где под управлением легковесной служебной операционной системы могут быть запущены такие программные средства, как, например, сетевые экраны. Таким образом, служебное приложение будет работать абсолютно незаметно для пользователя и его операционной системы.
Запуск агента безопасности в среде, независимой от основной операционной системы, позволяет добиться его постоянной работоспособности и большей защищенности от атак.
Вторая технология, реализованная в vPro, — AMT — позволяет администратору получить удаленный доступ даже к неработающему пользовательскому компьютеру. По словам регионального директора Intel в странах СНГ Дмитрия Конаша, переход на vPro приведет к существенной экономии на управлении ИТ-инфраструктурой за счет упрощения учета парка персональных компьютеров, поскольку сведения обо всех подключенных к сети ПК (информация о конфигурации системы хранится в специальном разделе энергонезависимой памяти) будут собираться автоматически, а также за счет сокращения количества визитов ИТ-персонала на рабочие места пользователей в случае каких-либо сбоев.
Большинство проблем, в том числе возникших из-за краха операционной системы, администратор может полностью решить удаленно, поскольку имеет возможность включить питание ПК, дав команду по локальной сети, получить доступ к BIOS, прочитать журнал событий и восстановить ОС.
Такая проблема, как поломка жесткого диска, также теоретически потребует только одного визита: при помощи средств диагностики администратор определит причину неисправности, модель жесткого диска и придет к пользовательскому ПК уже с необходимым запасным устройством.
С точки зрения пользователей, процедуры текущего обслуживания настольных ПК должны доставлять меньше хлопот, поскольку администраторы могут назначать обновление программного обеспечения на ночное время вместо того, чтобы делать это в разгар рабочего дня.
[ http://www.morepc.ru/dict/]Тематики
EN
Англо-русский словарь нормативно-технической терминологии > vPro
49 Paranoid Application support
поддержка параноидальных приложений
Поддержка "параноидальных" приложений позволяет партнерским приложениям принудительно заставить SSO-сервер повторить аутентификацию пользователя, даже если SSO-куки все еще остаются корректными. Возможность поддержки параноидальных приложений позволяет особо конфиденциальным ("параноидальным") приложениям требовать более частой повторной аутентификации, чем это обеспечивает SSO-сервер. Это также позволяет выполнять аутентификацию, управляемую событиями, поскольку пользователь, после выполнения в приложении некоторых особо конфиденциальных действий, будет обязан выполнить повторную аутентификацию [http://www.oracle.com/pls/oow/oow_user.show_public?p_event=12&p_type=session&p_session_id=34424].
[ http://www.morepc.ru/dict/]Тематики
EN
Англо-русский словарь нормативно-технической терминологии > Paranoid Application support
50 HDR
полезная нагрузка заголовка MIKEY
(МСЭ-Т Н.235.7).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
расширенный динамический диапазон
рендеринг в широком динамическом диапазоне
1.Применяется в новом стандарте для TIFF-файлов, предложенном фирмой Leaf Systems. Для каждого из основных RGB-цветов выделяется 16 бит, т.е. общая разрядность составляет 48 бит. Таким образом, на каждый цвет приходится 65536 оттенков, что позволяет пользователям оперировать с такими деталями изображений, которые обычно теряются при восьмибитовом сканировании на каждый из основных цветов.
2. В применении к 3D графике суть HDR заключается в описании интенсивности и цвета реальными физическими величинами.
Динамического диапазона модели описания RGB недостаточно для представления изображений, которые человек способен видеть в реальности, эта модель значительно уменьшает возможные значения интенсивности света в верхней и нижней части диапазона.
HDR рендеринг позволяет изменять экспозицию уже после того, как мы отрендерили изображение. Дает возможность имитировать эффект адаптации человеческого зрения (перемещение из ярких открытых пространств в темные помещения и наоборот), позволяет выполнять физически правильное освещение, а также является унифицированным решением для применения эффектов постобработки (glare, flares, bloom, motion blur). Алгоритмы обработки изображения, цветокоррекцию, гамма-коррекцию, motion blur, bloom и другие методы постобработки качественней выполнять в HDR представлении.
[ http://www.morepc.ru/dict/]
расширенный динамический диапазон
Функция, позволяющая качественно отображать в одном кадре засвеченные и затемнённые участки. Основана на комбинации двух кадров, снятых в различных режимах.
[ http://www.spezvideo.ru/glossary/W/]Тематики
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > HDR
51 rootkit
- руткит
- программа или набор программ для скрытного взятия под контроль взломанной системы
программа или набор программ для скрытного взятия под контроль взломанной системы
Термин Rootkit исторически пришёл из мира UNIX, и под этим термином понимается набор утилит, которые хакер устанавливает на взломанном им компьютере после получения первоначального доступа. Этот набор, как правило, включает в себя разнообразные утилиты для получения прав суперпользователя root (отсюда и название), для заметания следов вторжения в систему, хакерский инструментарий (сниферы, сканеры) и троянские программы, замещающие основные утилиты UNIX. Rootkit позволяет хакеру закрепиться во взломанной системе и скрыть следы своей деятельности. В системах Windows под rootkit принято подразумевать программу, которая внедряется в систему и перехватывает системные функции (Windows API). Перехват и модификация низкоуровневых API-функций, в первую очередь, позволяет такой программе достаточно качественно маскировать своё присутствие в системе. Кроме того, как правило, rootkit может маскировать присутствие в системе любых описанных в его конфигурации процессов, каталогов и файлов на диске, ключей в реестре. Многие rootkit устанавливают в систему свои драйверы и службы (они, естественно, также являются невидимыми).
[ http://www.morepc.ru/dict/]Тематики
EN
руткит
Набор утилит, которые хакер устанавливает на взломанном им компьютере после получения первоначального доступа. Руткит позволяет хакеру закрепиться во взломанной системе и скрыть следы своей деятельности.
[ http://www.rfcmd.ru/glossword/1.8/index.php?a=index&d=4108]Тематики
EN
Англо-русский словарь нормативно-технической терминологии > rootkit
52 programmable controller
программируемый контроллер
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > programmable controller
53 storage-programmable logic controller
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > storage-programmable logic controller
54 High Dynamic Range
расширенный динамический диапазон
рендеринг в широком динамическом диапазоне
1.Применяется в новом стандарте для TIFF-файлов, предложенном фирмой Leaf Systems. Для каждого из основных RGB-цветов выделяется 16 бит, т.е. общая разрядность составляет 48 бит. Таким образом, на каждый цвет приходится 65536 оттенков, что позволяет пользователям оперировать с такими деталями изображений, которые обычно теряются при восьмибитовом сканировании на каждый из основных цветов.
2. В применении к 3D графике суть HDR заключается в описании интенсивности и цвета реальными физическими величинами.
Динамического диапазона модели описания RGB недостаточно для представления изображений, которые человек способен видеть в реальности, эта модель значительно уменьшает возможные значения интенсивности света в верхней и нижней части диапазона.
HDR рендеринг позволяет изменять экспозицию уже после того, как мы отрендерили изображение. Дает возможность имитировать эффект адаптации человеческого зрения (перемещение из ярких открытых пространств в темные помещения и наоборот), позволяет выполнять физически правильное освещение, а также является унифицированным решением для применения эффектов постобработки (glare, flares, bloom, motion blur). Алгоритмы обработки изображения, цветокоррекцию, гамма-коррекцию, motion blur, bloom и другие методы постобработки качественней выполнять в HDR представлении.
[ http://www.morepc.ru/dict/]
расширенный динамический диапазон
Функция, позволяющая качественно отображать в одном кадре засвеченные и затемнённые участки. Основана на комбинации двух кадров, снятых в различных режимах.
[ http://www.spezvideo.ru/glossary/W/]Тематики
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > High Dynamic Range
55 wide dynamic range
расширенный динамический диапазон
рендеринг в широком динамическом диапазоне
1.Применяется в новом стандарте для TIFF-файлов, предложенном фирмой Leaf Systems. Для каждого из основных RGB-цветов выделяется 16 бит, т.е. общая разрядность составляет 48 бит. Таким образом, на каждый цвет приходится 65536 оттенков, что позволяет пользователям оперировать с такими деталями изображений, которые обычно теряются при восьмибитовом сканировании на каждый из основных цветов.
2. В применении к 3D графике суть HDR заключается в описании интенсивности и цвета реальными физическими величинами.
Динамического диапазона модели описания RGB недостаточно для представления изображений, которые человек способен видеть в реальности, эта модель значительно уменьшает возможные значения интенсивности света в верхней и нижней части диапазона.
HDR рендеринг позволяет изменять экспозицию уже после того, как мы отрендерили изображение. Дает возможность имитировать эффект адаптации человеческого зрения (перемещение из ярких открытых пространств в темные помещения и наоборот), позволяет выполнять физически правильное освещение, а также является унифицированным решением для применения эффектов постобработки (glare, flares, bloom, motion blur). Алгоритмы обработки изображения, цветокоррекцию, гамма-коррекцию, motion blur, bloom и другие методы постобработки качественней выполнять в HDR представлении.
[ http://www.morepc.ru/dict/]
расширенный динамический диапазон
Функция, позволяющая качественно отображать в одном кадре засвеченные и затемнённые участки. Основана на комбинации двух кадров, снятых в различных режимах.
[ http://www.spezvideo.ru/glossary/W/]Тематики
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > wide dynamic range
56 securitization
секьюретизация
перевод обязательств в ценные бумаги
Популярный метод решения проблем с потенциально неокупаемыми издержками электроэнергетических предприятий. Представляет собой перевод обязательств этих предприятий в ценные бумаги, то есть создание финансового залогового обязательства или облигации, обеспеченных стабильным потоком дохода, который гарантирует выплату основной суммы и процентов по этим бумагам. Этот механизм позволяет электроэнергетическим предприятиям получить авансом единовременные средства с продажи ценных бумаг. Требует создания отчуждаемого права собственности, позволяющего за счет потребителей коммунальных услуг покрыть убытки за их переход к другому поставщику («плата за переход к другому поставщику») или других видов обязательной платы, налагаемой на потребителей. Такая плата обычно, хотя и не всегда, основывается на доле неокупаемых (вынужденных) затрат электроэнергетического предприятия. При секъюретизации, электроэнергетическое предприятие обычно передаёт право собственности назначенному доверительному собственнику («независимому третьему лицу на случай возможного банкротства»). Доверительный собственник выпускает облигации и перечисляет электроэнергетическому предприятию выручку от продажи ценных бумаг на финансовом рынке за вычетом затрат по сделке. Далее держатели облигаций получают право взимать плату с потребителей электроэнергетических предприятий, для которых эта плата обязательна. Электроэнергетическое предприятие или распределительная компания собирает платежи с потребителей и перечисляет вырученные средства доверительному собственнику, который затем выплачивает их держателям облигаций. Выручка электроэнергетического предприятия в этом случае равна текущей стоимости полученных от потребителей платежей за вычетом отчислений держателям ценных бумаг («дисконтированной текущей стоимости потребительских платежей»).
[Англо-русский глосcарий энергетических терминов ERRA]EN
securitization
An often discussed means of dealing with potential electric utility "stranded costs" is securitization. Securitization refers to the creation of a financial security or bond that is backed by a revenue stream pledged to pay the principal and interest of that security. This device provides utilities an up-front, lump-sum payment from the sale of the security. Securitization requires the creation of a transferrable property right to collect from the utility's ratepayers a "customer transition charge" or through some other "non-bypassable" obligation placed on ratepayers. The charge is usually, but not always, based on some portion of the utility's "stranded" or uneconomic costs. If this option is exercised by the utility, the property right can be transferred by the utility to a designated trustee, a "bankruptcy remote special purpose entity." the trustee then issues a bond and pays the utility the cash proceeds from the sale of the security in the financial market less transaction costs. The securitized bondholders then have the right to collect the charge from the utility's customers that are obligated to pay it. The utility or distribution company collects the customer charge from the customers and transfers the funds to the trustee that then transfers it to the securitized bondholders. The cash proceeds the utility receives should equal the discounted present value of the customer charge revenue stream.
[Англо-русский глосcарий энергетических терминов ERRA]Тематики
Синонимы
EN
секьюритазация
Процесс, позволяющий заменить банковские заимствования и кредитования выпуском ценных бумаг типа еврооблигаций (eurobonds). Банк занимает деньги у сберегателей (инвесторов) и ссужает их заемщикам, взимая за обе операции плату, наряду с начислениями процентов. Наличие у заемщика возможности получить деньги непосредственно от инвесторов путем выпуска и размещения среди них облигаций (или акций) позволяет снизить издержки как заемщиков, так и кредиторов. Секьюритизация получила распространение в 1980-х гг. с развитием технологии и новых форм инвестирования.
[ http://www.vocable.ru/dictionary/533/symbol/97]Тематики
EN
секьюритизация
От слова security, ценная бумага: 1. Превращение финансового инструмента — долговой расписки, контракта, залога и т.п. в ценную бумагу, торгуемую на финансовом рынке. 2. В более широком смысле — процесс преобразования низколиквидных в ликвидные ценные бумаги, обращающиеся на рынке (напр., С. дебиторской задолженности). В этом сысле термин С. применяется наиболее часто.. Причем обычно имеется в виду объединение ценных бумаг в пулы, что позволяет снизить степень риска для их приобретателей.Массовой становится практика выпуска ценных бумаг под залог кредитов в периоды, когда кредиты порождаются усиленным притоком в экономику дешевых денег. 3. Использование денежных поступлений, предусмотренных условиями контракта, в качестве обеспечения при выпуске долговых обязательств.
[ http://slovar-lopatnikov.ru/]Тематики
EN
Англо-русский словарь нормативно-технической терминологии > securitization
57 thin provisioning
тонкое резервирование
Технология "тонкого" резервирования (thin provisioning) позволяет избежать расхода пространства хранения впустую. Разработка поможет справиться с проблемой избыточного резервирования, когда емкости, заранее выделенные приложениям, не используются ими. "Тонкое" резервирование позволяет создать единый резервный пул хранения сразу для многих приложений. Таким образом, как утверждается, приложениям можно выделить более 100% доступного пространства хранения, но тем не менее резерв будет всегда оставаться доступным, поскольку не окажется потребленным сразу весь. По словам специалистов Pillar Data Systems, технология дает возможность справиться со сложностями, характерными для некоторых операционных систем, в которых после первоначального указания размера логического блока (LUN) нельзя увеличить его впоследствии без трудоемких операций, из-за чего заранее на всякий случай приходится выделять больше, чем требуется. "Тонкое" резервирование же позволяет назначить для LUN размер больше доступного.
[ http://www.morepc.ru/dict/]Тематики
EN
Англо-русский словарь нормативно-технической терминологии > thin provisioning
58 Ready Drive
функция ReadyDrive
ReadyDrive – это функция ОС Windows Vista, использующая возможности новых гибридных жестких дисков (дисков H-HDD). Гибридный жесткий диск представляет собой жесткий диск со встроенной энергонезависимой флэш-памятью (известной также под названием NVRAM). Как правило, гибридные жесткие диски содержат от 50 МБ до 512 МБ кэш-памяти, но ОС Windows Vista поддерживает кэши размером до 2 ТБ.
Чтобы определить, какие данные следует поместить во флэш-память, ОС Windows Vista использует команды ATA-8. Например, при завершении работы система сохраняет в этом кэше данные для загрузки, что позволяет ускорить следующий запуск системы. При переходе в режим гибернации в кэше сохраняются некоторые части файла гибернации, что ускоряет возобновление работы. Поскольку кэш активен даже когда диск остановлен, система может использовать флэш-память для кэширования записи на диск, что позволяет не раскручивать диск, если компьютер питается от аккумулятора. Остановка диска позволяет существенно снизить энергопотребление по сравнению с обычным режимом работы.
[ http://www.morepc.ru/dict/]Тематики
EN
Англо-русский словарь нормативно-технической терминологии > Ready Drive
59 ReadyDrive
функция ReadyDrive
ReadyDrive – это функция ОС Windows Vista, использующая возможности новых гибридных жестких дисков (дисков H-HDD). Гибридный жесткий диск представляет собой жесткий диск со встроенной энергонезависимой флэш-памятью (известной также под названием NVRAM). Как правило, гибридные жесткие диски содержат от 50 МБ до 512 МБ кэш-памяти, но ОС Windows Vista поддерживает кэши размером до 2 ТБ.
Чтобы определить, какие данные следует поместить во флэш-память, ОС Windows Vista использует команды ATA-8. Например, при завершении работы система сохраняет в этом кэше данные для загрузки, что позволяет ускорить следующий запуск системы. При переходе в режим гибернации в кэше сохраняются некоторые части файла гибернации, что ускоряет возобновление работы. Поскольку кэш активен даже когда диск остановлен, система может использовать флэш-память для кэширования записи на диск, что позволяет не раскручивать диск, если компьютер питается от аккумулятора. Остановка диска позволяет существенно снизить энергопотребление по сравнению с обычным режимом работы.
[ http://www.morepc.ru/dict/]Тематики
EN
Англо-русский словарь нормативно-технической терминологии > ReadyDrive
60 equispaced array
эквидистантная антенная решетка
Конфигурация антенной решетки (АР), в которой все излучатели расположены на равном расстоянии друг относительно друга. Для наиболее простой конфигурации АР характерно расположение излучателей на одной оси с равномерным шагом Дх (рис. Е-6, а). Главное направление излучения такой решетки перпендикулярно осевой линии центров излучателей, что позволяет сформировав диафамму направленности только в горизонтальной плоскости (по азимуту). Аналогичными свойствами обладает круговая АР с угловым разносом на Δφ=2π/N, где N — число элементов. Такая структура позволяет сформировать диаграмму направленности для любых азимутальных углов (рис. Е-6, б). Двумерная антенная решетка, в которой элементы расположены в двух плоскостях равномерно (шаги Дх и Ду, соответственно) позволяет изменять положение главного лепестка по азимуту и углу места (рис. Е-6, в). Чтобы диаграмма направленности охватывала все телесные углы необходимо использовать трехмерную структуру решетки с шагами Дх, Ду, Az (рис. Е-6, г), соответствующими разным направлениям координатных осей.
Рис. Е-6. Типовые конфигурации антенных решеток:
а) одномерная линейная решетка; 6) круговая решетка с угловым разносом; в) двумерная антенная решетка; г) структура кубической решетки
[Л.М. Невдяев. Телекоммуникационные технологии. Англо-русский толковый словарь-справочник. Под редакцией Ю.М. Горностаева. Москва, 2002]Тематики
- электросвязь, основные понятия
EN
Англо-русский словарь нормативно-технической терминологии > equispaced array
СтраницыСм. также в других словарях:
позволяет — закон позволяет • возможность, субъект, модальность законодательство позволяет • возможность, субъект, модальность информация позволяет • возможность, субъект, модальность использование позволяет • возможность, субъект, модальность метод… … Глагольной сочетаемости непредметных имён
скважина, дебит которой позволяет только погашать эксплуатационные затраты — Скважина, оценочный дебит которой сможет только погасить затраты на её бурение и завершение. [http://slovarionline.ru/anglo russkiy slovar neftegazovoy promyishlennosti/] Тематики нефтегазовая промышленность EN marginal well … Справочник технического переводчика
Позволье не позволяет — кому что. Сиб. Ирон. Кому л. не хочется что л. делать. ФСС, 141 … Большой словарь русских поговорок
Вера не позволяет — В шутку о невозможности принять предложение присутствующих, воспользоваться угощением якобы по религиозным мотивам. Так, например, будет выглядеть отказ хохла или булъбаша от сала … Словарь народной фразеологии
КУПМАНСА ТЕОРЕМА — позволяет рассчитывать потенциал ионизации атома или молекулы в рамках метода молекулярных орбиталей. Состояние электрона в молекуле описывается ур нием Шрёдингера, к рое, определяет волновую ф цию (орбиталь) и энергию электрона (орбитальную… … Химическая энциклопедия
Процедура описания трудовых процессов. Е. Ю. Артемьева, Л. Н. Лучко, Ю. К. Стрелков — Позволяет представлять результаты трудовых процессов на языке психол. понятий, сохраняя при этом специфику содержания изучаемого труда. Основой процедуры является 3 компонентная структура действия, предложенная В. П. Зинченко и расширенная… … Психология общения. Энциклопедический словарь
Брейта - Вигнера формула — позволяет определить вероятность ядерной реакции в зависимости от энергии бомбардирующей частицы, вызывающей данную реакцию. Предложена американскими физиками Г. Брейтом (G. Breit) и Ю. Вигнером (Е. Wigner) в 1936. Подробнее см. Ядерные… … Большая советская энциклопедия
ЭЛЕКТРОДИНАМИЧЕСКИЙ ПРИБОР — позволяет измерять электрич. напряжение, силу тока, мощность в цепях переменного тока; осн. на взаимодействии магн. полей двух (или более) контуров с током … Естествознание. Энциклопедический словарь
информационный запас 2-й степени — позволяет распределять обозначаемые уже не по классам предметов, явлений, а по родам … Толковый переводоведческий словарь
информационный запас 3-й степени — позволяет на основе предъявленной лексической единицы выделить денотат из группы однородных предметов … Толковый переводоведческий словарь
накопленная относительная частота — позволяет определить, какую часть текста (корпуса) в процентах покрывает словарная единица, и тем самым установить ее значимость … Толковый переводоведческий словарь
 18+© Академик, 2000-2024
18+© Академик, 2000-2024- Обратная связь: Техподдержка, Реклама на сайте
Экспорт словарей на сайты, сделанные на PHP, Joomla, Drupal, WordPress, MODx.
Перевод: с английского на все языки
со всех языков на английский- Со всех языков на:
- Английский
- С английского на:
- Русский