-
101 дифференциальный манометр
- differential-pressure gage
- differential pressure indicator
- differential pressure gage
- differential manometer
- differential gauge pressure
дифференциальный манометр
дифманометр
Манометр для измерения разности двух давлений.
Примечание
Дифманометр с верхним пределом измерения не более 40000 Па (4000 кгс/м2) называется микроманометром.
[ГОСТ 8.271-77]
дифференциальный манометр
-
[Лугинский Я. Н. и др. Англо-русский словарь по электротехнике и электроэнергетике. 2-е издание - М.: РУССО, 1995 - 616 с.]EN
differential-pressure gage
(engineering) Apparatus to measure pressure differences between two points in a system; it can be a pressured liquid column balanced by a pressured liquid reservoir, a formed metallic pressure element with opposing force, or an electrical-electronic gage (such as strain, thermal-conductivity, or ionization).
[ http://www.answers.com/topic/differential-pressure-gage#ixzz1gzzibWaQ]Малые значения дифференциального давления могут измеряться приборами на основе мембран и сильфонов.
Манометры дифференциальные сильфонные показывающие типа ДСП-160 нашли широкое применение на территории СНГ. Принцип их действия основан на деформации двух автономных сильфонных блоков, находящихся под воздействием «плюсового» и «минусового» давления. Эти деформации преобразовываются в перемещение указательной стрелки прибора. Перемещение стрелки осуществляется до установления равновесия между «плюсовым» сильфоном, с одной стороны, и «минусовым» и цилиндрической пружиной - с другой.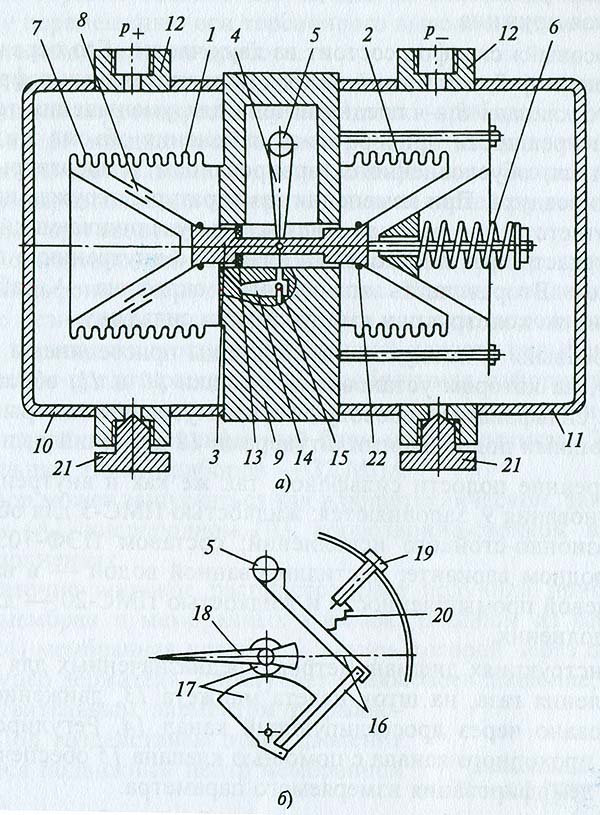
Рис. 2.23Дифференциальный сильфонный манометр:
а – схема привода стрелки;
б – блок первичного преобразования;
1 – «плюсовый» сильфон;
2 – «минусовый» сильфон;
3 – шток;
4 – рычаг;
5 – торсионный вывод;
6 – цилиндрическая пружина;
7 – компенсатор;
8 – плоскостный клапан;
9 – основание;
10 и 11 – крышки;
12 – подводящий штуцер;
13 – манжета;
14 – дросселирующий канал;
15 – клапан;
16 – рычажная система;
17 – трибко-секторный механизм;
18 – стрелка;
19 – регулировочный винт;
20 – натяжная пружина;
21 – пробка;
22 – уплотнительное резиновое кольцо«Плюсовый» 1 и «минусовый» 2 сильфоны (рис. Рис. 2.23, б) соединены между собой штоком 3, функционально связанным с рычагом 4, который, в свою очередь, неподвижно закреплен на оси торсионного вывода 5. К концу штока на выходе «минусового» сильфона присоединена цилиндрическая пружина 6, закрепленная нижним основанием на компенсаторе 7 и работающая на растяжение. Каждому номинальному перепаду давления соответствует определенная пружина.
«Плюсовый» сильфон состоит из двух частей. Его первая часть (компенсатор 7, состоящий из трех дополнительных гофр и плоскостных клапанов 8) предназначена для уменьшения температурной погрешности прибора из-за изменения объема жидкости-наполнителя, обусловленного варьированием температуры окружающего воздуха. При изменении температуры окружающей среды и соответственно рабочей жидкости ее увеличивающийся объем перетекает через плоскостный клапан во внутреннюю полость сильфонов. Вторая часть «плюсового» сильфона рабочая и идентична по конструкции «минусовому» сильфону.
«Плюсовый» и «минусовый» сильфоны присоединены к основанию 9, на котором установлены крышки 10 и 11, образующие вместе с сильфонами «плюсовую» и «минусовую» камеры с соответствующими подводящими штуцерами 12 давления р + и рВнутренние объемы сильфонов, так же как и внутренняя полость основания 9, заполняются: жидкостью ПМС-5 для обычного и коррозионно-стойкого исполнений; составом ПЭФ-703110 – в кислородном варианте; дистиллированной водой – в варианте для пищевой промышленности и жидкостью ПМС-20 – для газового исполнения.
В конструкциях дифманометров, предназначенных для измерения давления газа, на шток одета манжета 13, движение среды организовано через дросселирующий канал 14. Регулированием размера проходного канала с помощью клапана 15 обеспечивается степень демпфирования измеряемого параметра.
Дифманометр работает следующим образом. Среды «плюсового» и «минусового» давления поступают через подводящие штуцеры в «плюсовую» и «минусовую» камеры соответственно. «Плюсовое» давление в большей степени воздействует на сильфон 1, сжимая его. Это приводит к перетоку находящейся внутри жидкости в «минусовый» сильфон, который растягивается и разжимает цилиндрическую пружину. Такая динамика происходит до уравновешивания сил взаимодействия между «плюсовым» сильфоном и парой – «минусовый» сильфон – цилиндрическая пружина. Мерой деформации сильфонов и их упругого взаимодействия служит перемещение штока, которое передается на рычаг и соответственно на ось торсионного вывода. На этой оси (рис. 2.23,а) закреплена рычажная система 16, обеспечивающая передачу вращения оси торсионного вывода к трибко-секторному механизму 17 и стрелке 18. Таким образом, воздействие на один из сильфонов приводит к угловому перемещению оси торсионного вывода и затем к повороту указательной стрелки прибора.
Регулировочным винтом 19 с помощью натяжной пружины 20 производится корректировка нулевой точки прибора.
Пробки 21 предназначены для продувки импульсных линий, промывки измерительных полостей сильфонного блока, слива рабочей среды, заполнения измерительных полостей разделительной жидкостью при вводе прибора в работу.
При односторонней перегрузке одной из камер происходит сжатие сильфона и перемещение штока. Клапан в виде уплотнительного резинового кольца 22 садится в гнездо основания, перекрывает переток жидкости из внутренней полости сильфона, и таким образом предотвращается его необратимая деформация. При непродолжительных перегрузках разность «плюсового» и «минусового» давления на сильфонный блок может достигать 25 МПа, а в отдельных типах приборов не превышать 32 МПа.
прибор может выпускаться как в общетеническом, так и в аммиачном (А), кислородном (К), коррозионно-стойком-пищевом (Пп) исполнениях.
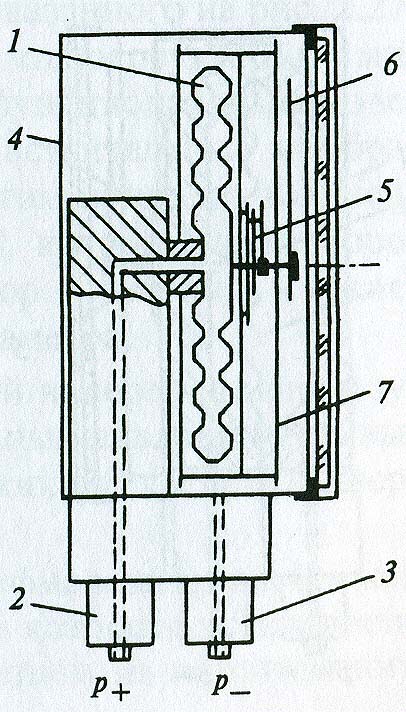
Рис. 2.24Показывающий дифференциальный манометр на основе мембранной коробки:
1 – мембранная коробка;
2 – держатель «плюсового» давления;
3 – держатель «минусового» давления;
4 – корпус;
5 – передаточный механизм;
6 – стрелка;
7 – циферблаДостаточно широкое распространение получили приборы на основе мембран и мембранных коробок. В одном из вариантов (рис. 2.24) мембранная коробка 1, внутрь которой через подводящий штуцер держателя 2 поступает «плюсовое» давление, является чувствительным элементом дифманометра. Под воздействием этого давления смещается подвижный центр мембранной коробки.
«Минусовое» давление через подводящий штуцер держателя 3 подается внутрь герметичного корпуса 4 прибора и воздействует на мембранную коробку снаружи, создавая противодействие перемещению ее подвижного центра. Таким образом «плюсовое» и «минусовое» давления уравновешивают друг друга, а перемещение подвижного центра мембранной коробки свидетельствует о величине разностного – дифференциального давления. Этот сдвиг через передаточный механизм передается на указательную стрелку 6, которая на шкале циферблата 7 показывает измеряемое дифференциальное давление.
Диапазон измеряемого давления определяется свойствами мембран и ограничивается, как правило, в пределах от 0 до 0,4…40 кПа. При этом класс точности может составлять 1,5; 1,0; 0,6; 0,4, а в некоторых приборах 0,25.
Обязательная конструктивная герметичность корпуса определяет высокую защищенность от внешних воздействий и определяется в основном уровнем IP66.
В качестве материала для чувствительных элементов приборов используется бериллиевая и другие бронзы, а также нержавеющая сталь, для штуцеров, передаточных механизмов – медные сплавы, коррозионно-стойкие сплавы, включая нержавеющую сталь.
Приборы могут изготавливаться в корпусах малых (63 мм), средних (100 мм), и больших (160 мм) диаметров.
Мембранные показывающие дифференциальные манометры, как и приборы с мембранными коробками, используются для измерения малых значений дифференциального давления. Отличительная особенность – устойчивая работа при высоком статическом давлении.
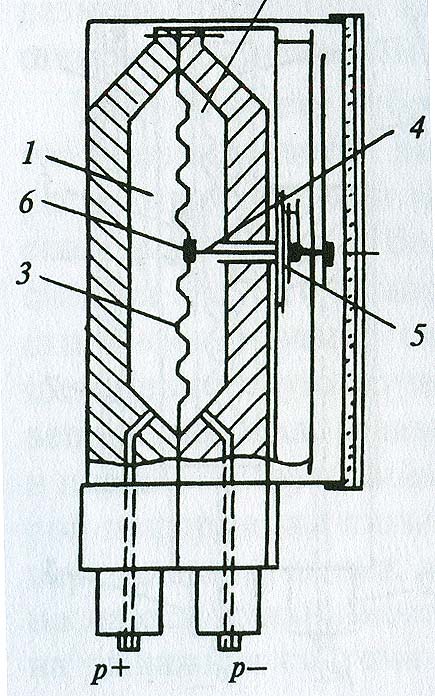
Рис. 2.25Мембранные показывающие дифференциальные манометры с вертикальной мембраной:
1 – «плюсовая» камера;
2 – «минусовая» камера;
3 – чувствительная гофрированная мембрана;
4 – передающий шток;
5 – передаточный механизм;
6 – предохранительный клапанДифманометр с вертикальной мембраной (Рис. 2.25) состоит из «плюсовой» 1 и «минусовой» 2 рабочих камер, разделенных чувствительной гофрированной мембраной 3. Под воздействием давления мембрана деформируется, в результате чего перемещается ее центр вместе с закрепленным на нем передающим штоком 4. Линейное смещение штока в передаточном механизме 5 преобразуется в осевое вращение трибки, и соответственно указательной стрелки, отсчитывающей на шкале прибора измеряемое давление.
Для сохранения работоспособности чувствительной гофрированной мембраны при превышении максимального допустимого статического давления предусмотрен открывающийся предохранительный клапан 6. Причем конструкции этих клапанов могут быть различны. Соответственно такие приборы не могут использоваться, когда не допускается контакт сред из «плюсовой» и «минусовой» камер.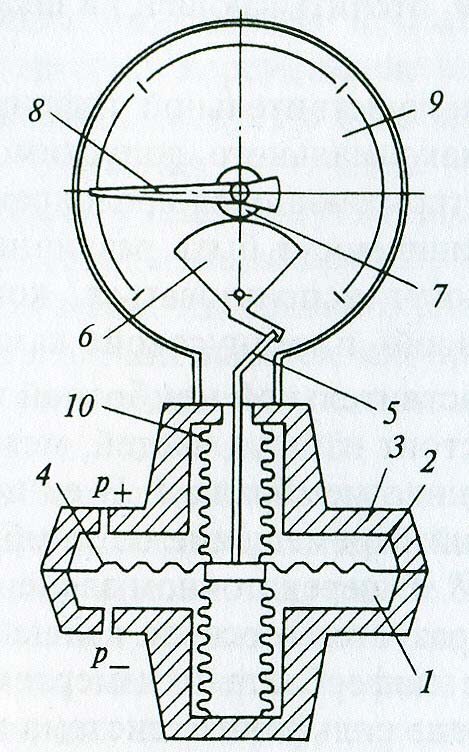
Рис. 2.26Мембранный показывающий дифференциальный манометр с горизонтальной мембраной:
1 – «плюсовая» камера;
2 – «минусовая» камера;
3 – входной блок;
4 - чувствительная гофрированная мембрана;
5 – толкатель;
6 – сектор;
7 – трибка;
8 – стрелка;
9 – циферблат;
10 – разделительный сильфонДифманометр с горизонтальной чувствительной мембраной показан на рис. 2.26. Входной блок 3 состоит из двух частей, между которыми устанавливается гофрированная мембрана 4. В ее центре закреплен толкатель 5, передающий перемещение от мембраны, через сектор 6, трибку 7 к стрелке 8. В этом передаточном звене линейное перемещение толкателя преобразуется в осевое вращение стрелки 8, отслеживающей на шкале циферблата 9 измеряемое давление. В этой конструкции применена сильфонная система вывода толкателя из зоны рабочего давления. Разделительный сильфон 10 своим основанием герметично закрепляется на центре чувствительной мембраны, а верхней частью также герметично прикрепляется к входному блоку. Такая конструкция исключает контакт измеряемой и окружающей сред.
Конструкция входного блока предусматривает возможность промывки или продувки «плюсовой» и «минусовой» камер и обеспечивает применение таких приборов для работы даже в условиях загрязненных рабочих сред.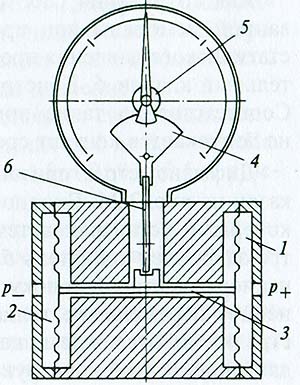
Рис. 2.27Мембранный двухкамерный показывающий дифманометр:
1 – «плюсовая» камера;
2 – «минусовая» камера;
3 – передающий шток;
4 – сектор;
5 – трибка;
6 – коромыслоДвухкамерная система измерения дифференциального давления применена в конструкции прибора, показанного на рис. 2.27. Измеряемые потоки среды направляются в «плюсовую» 1 и «минусовую» 2 рабочие камеры, основными функциональными элементами которых являются автономные чувствительные мембраны. Преобладание одного давления над другим приводит к линейному перемещению передающего штока 3, которое через коромысло 6 передается соответственно на сектор 4, трибку 5 и систему стрелочной индикации измеряемого параметра.
Дифманометры с двухкамерной системой измерения используются для измерения малых дифференциальных давлений при высоких статических нагрузках, вязких сред и сред с твердыми вкраплениями.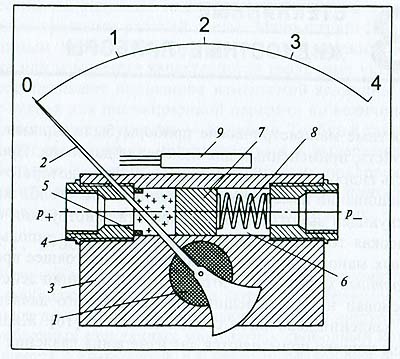
Рис. 2.28.Дифманометр с магнитным преобразователем:
1 – поворотный магнит;
2 – стрелка;
3 – корпус;
4 – магнитный поршень;
5 – фторопластовый сальник;
6 – рабочий канал;
7 – пробка;
8 – диапазонная пружина;
9 – блок электроконтактовПринципиально иной показывающий дифманометр изображен на рис. 2.28. Поворотный магнит 1, на торце которого установлена стрелка 2, размещен в корпусе 3, выполненном из немагнитного металла. Магнитный поршень, уплотненный фторопластовым сальником 5, может передвигаться в рабочем канале 6. Магнитный поршень 4 со стороны «минусового» давления подпирает пробка 7, в свою очередь поджимаемая диапазонной пружиной 8.
Среда «плюсового» давления через соответствующий подводящий штуцер воздействует на магнитный поршень и сдвигает его вместе с пробкой 7 по каналу 6 до уравновешивания такого смещения противодействующими силами – «минусовым» давлением и диапазонной пружиной. Движение магнитного поршня приводит к осевому вращению поворотного магнита и соответственно указательной стрелки. Такой сдвиг пропорционален перемещению стрелки. Полное согласование достигается подбором упругих характеристик диапазонной пружины.
В дифманометре с магнитным преобразователем предусмотрен блок 9, замыкающий и размыкающий соответствующие контакты при прохождении вблизи его магнитного поршня.
Приборы с магнитным преобразователем устойчивы к воздействию статического давления (до 10 МПа). Они обеспечивают относительно невысокую погрешность (примерно 2 %) в диапазоне функционирования до 0,4 Мпа и используются для измерения давления воздуха, газов, различных жидкостей.[ http://jumas.ru/index.php?area=1&p=static&page=razdel_2_3_2]
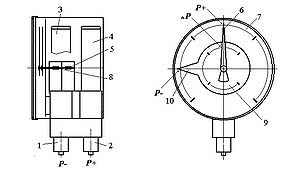
Показывающий дифференциальный манометр на основе трубчатой пружины1 и 2 – держатели;
3 и 4 – трубчатые пружины;
5 и 8 – трибки;
6 – стрелка «плюсового» давления;
7 и 9 – шкалы избыточного давления;
10 – стрелка «минусового» давленияВ приборах такого типа на автономных держателях 1 и 2, соединенных вместе, установлены трубчатые пружины. Каждый держатель вместе с трубчатым чувствительным элементом образовывают автономные измерительные каналы. Среда «плюсового» давления поступает через входной штуцер держателя 2 в трубку 4, деформирует ее овал, в результате чего перемещается наконечник трубки и это перемещение через соответствующий зубчатый сектор передается на трибку 5. Эта трибка соответственно приводит к отклонению указательной стрелки 6, которая показывает на шкале 7 значение «плюсового» избыточного давления.
«Минусовое» давление посредством держателя 1, трубчатой пружины 3, трибки 8 приводит к перемещению циферблата 9, объединенного со стрелкой 10, которая на шкале 7 отслеживает значение измеряемого параметра.Дифференциальные манометры (далее – дифманометры), как отмечалось в п.1.3, являются названием отнесенным в нашей стране к показывающим приборам. (Устройства, обеспечивающие электрический выходной сигнал, пропорциональный измеряемому дифференциальному давлению имеют название измерительных преобразователей разности давлений). Хотя отдельные производители, а также некоторые специалисты-эксплуатанционщики измерительные преобразователи разности давлений также называют дифманометрами.
Дифманометры нашли основное применение в технологических процессах для измерения, контроля, регистрации и регулирования следующих параметров:
· расхода различных жидких, газообразных и парообразных сред по перепаду давления на разного рода сужающих устройствах (стандартных диафрагмах, соплах, включая сопла Вентури) и дополнительно вводимых в поток гидро- и аэродинамических сопротивлениях, например на преобразователях типа Annubar или на нестандартных гидро- и аэродинамических препятствиях;
· перепада - разности давления, вакуумметрических, избыточных, в двух точках технологического цикла, включая потери на фильтрах систем вентиляции и кондиционирования воздуха;
· уровня жидких сред по величине гидростатического столба.
Согласно ГОСТ 18140–84/23/, предельные номинальные перепады давления дифманометров-расходомеров, верхние пределы или сумма абсолютных значений верхних пределов измерений дифманометров-перепадомеров должны приниматься из следующего ряда:
10; 16; 25; 40; 63; 100; 160; 250; 400; 630 Па;
1; 1,6; 2,5; 4; 6,3; 10; 16; 25; 40; 63; 100; 160; 250; 400; 630 кПа;
1; 1,6; 2,5; 4; 6,3 МПа.
У дифманометров-расходомеров верхние пределы измерений выбираются из ряда, определяемого выражением:
А = а × 10n, (2.7)
где а – одно из чисел следующего ряда: 1; 1,25; 1,6; 2,0; 2,5; 3,2; 4; 5; 6,3; 8; n – целое (положительное или отрицательное) число или нуль.
Верхние пределы измерений или сумма абсолютных значений верхних пределов измерений дифманометров-уровнемеров следует выбирать и ряда:
0,25; 0,4; 0,63; 1,0; 1,6; 2,5; 4,0; 6,3; 10; 16; 25; 40; 63; 100 и 160 метров.
Одной из важных характеристик дифманометров является предельно допустимое рабочее избыточное давление, т. е. избыточное давление, которое могут выдержать рабочие каналы без необратимой деформации чувствительных элементов. Такое значение параметра принимается из следующего ряда:
25; 40; 63; 100; 160; 250; 400 и 630 кПа;
1; 1,6; 2,5; 4; 6,3; 10; 16; 25; 32; 40 и 63 МПа.
Нижние пределы измерений дифманометров-расходо-меров из-за неустойчивости работы стандартных сужающих устройств при малых Числах Рейнольдса измеряемого потока не должны превышать 30 % шкалы прибора. У преобразователей Annubar этот предел не превышает 10 % при сохранении объявленного класса точности (1,0).
Классы точности дифманометров принимаются из ряда: 0,25; 0,5; 1,0; 1,5.
Дифманометры должны иметь линейную шкалу при измерении уровня или перепада, линейную или квадратичную – при измерении расхода.
Дифманометры могут иметь условные обозначения, предложенные в методике п.1.4. Указываются модель прибора, причем на первом месте в обозначении фиксируется измеряемый параметр – тип измерителя (дифманометр), затем – принцип измерения и функция, предельный номинальный перепад, избыточное рабочее давление, класс точности. Например, дифманометр сильфонный показывающий в корпусе диаметром 160 мм, на предельный номинальный перепад давления 630 кПа, с рабочим избыточным давлением 32 МПа, класса точности 1,5 обозначается как
ДСП 160 (0…630 кПа)-32 МПа-1,5.
После этого допускается указывать дополнительные обозначения, например исполнение по «IP», измеряемой среде, присоединительным линиям и т. д.
Специфика измерения дифференциального давления обусловливает наличие в дифманометрах устройств продувки импульсных линий без необходимости демонтажа прибора или его узлов.
При испытаниях, а также в нормальных условиях отечественные дифманометры, согласно требований производителя, должны обеспечивать заданные метрологические характеристики после выдержки не менее 6-ти часов при температуре окружающей среды:
20 ± 2 или 23 ± 2 оС – для приборов классов точности 0,5; 0,6 и 1;
20 ± 5 или 23 ± 5 оС – для приборов класса точности 1,5.
Современные конструкции из-за снижения металлоемкости и совершенствования преобразователей позволяют сокращать время температурной адаптации у некоторых моделей до нескольких десятков минут.
Конкретная температура приведена в ТУ на измеритель и должна регистрироваться в техническом описании или паспорте на прибор.
Дифманометры, не защищенные от одностороннего воздействия, должны выдерживать перегрузку со стороны среды «плюсового» давления, превышающую предельные номинальные перепады на 10…50 %. «Плюсовым», в противовес «минусовому», называют большее из двух давлений среды, поступающей на вход дифференциального манометра.
Конструкции, у которых предусмотрены односторонние перегрузки, должны выдерживать десятикратные, стократные или двухсот пятидесятикратные односторонние перегрузки/23/.
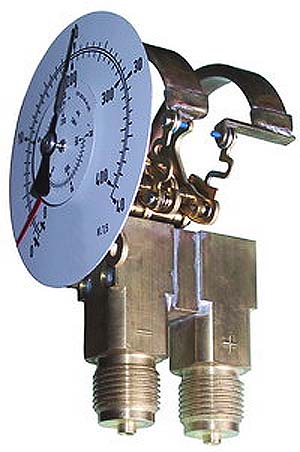
Показывающие дифференциальные манометры на основе трубчатой пружины находят широкое применение для визуализации расхода различных сред, гидродинамических потерь в системах теплового отопления.
Дифференциальное давление, т. е. разность давлений р отсчитывается стрелкой на шкале циферблата.
Дифманометры такого типа, исходя из особенностей трубчатых пружин, обеспечивают работоспособность в промышленных условиях в диапазоне от 0 до 100 МПа.[ http://jumas.ru/index.php?area=1&p=static&page=razdel2_2_4]
Тематики
Синонимы
EN
- differential gauge pressure
- differential manometer
- differential pressure gage
- differential pressure indicator
- differential-pressure gage
DE
FR
Русско-английский словарь нормативно-технической терминологии > дифференциальный манометр
-
102 дифференциальный манометр
дифференциальный манометр
дифманометр
Манометр для измерения разности двух давлений.
Примечание
Дифманометр с верхним пределом измерения не более 40000 Па (4000 кгс/м2) называется микроманометром.
[ГОСТ 8.271-77]
дифференциальный манометр
-
[Лугинский Я. Н. и др. Англо-русский словарь по электротехнике и электроэнергетике. 2-е издание - М.: РУССО, 1995 - 616 с.]EN
differential-pressure gage
(engineering) Apparatus to measure pressure differences between two points in a system; it can be a pressured liquid column balanced by a pressured liquid reservoir, a formed metallic pressure element with opposing force, or an electrical-electronic gage (such as strain, thermal-conductivity, or ionization).
[ http://www.answers.com/topic/differential-pressure-gage#ixzz1gzzibWaQ]Малые значения дифференциального давления могут измеряться приборами на основе мембран и сильфонов.
Манометры дифференциальные сильфонные показывающие типа ДСП-160 нашли широкое применение на территории СНГ. Принцип их действия основан на деформации двух автономных сильфонных блоков, находящихся под воздействием «плюсового» и «минусового» давления. Эти деформации преобразовываются в перемещение указательной стрелки прибора. Перемещение стрелки осуществляется до установления равновесия между «плюсовым» сильфоном, с одной стороны, и «минусовым» и цилиндрической пружиной - с другой.
Рис. 2.23Дифференциальный сильфонный манометр:
а – схема привода стрелки;
б – блок первичного преобразования;
1 – «плюсовый» сильфон;
2 – «минусовый» сильфон;
3 – шток;
4 – рычаг;
5 – торсионный вывод;
6 – цилиндрическая пружина;
7 – компенсатор;
8 – плоскостный клапан;
9 – основание;
10 и 11 – крышки;
12 – подводящий штуцер;
13 – манжета;
14 – дросселирующий канал;
15 – клапан;
16 – рычажная система;
17 – трибко-секторный механизм;
18 – стрелка;
19 – регулировочный винт;
20 – натяжная пружина;
21 – пробка;
22 – уплотнительное резиновое кольцо«Плюсовый» 1 и «минусовый» 2 сильфоны (рис. Рис. 2.23, б) соединены между собой штоком 3, функционально связанным с рычагом 4, который, в свою очередь, неподвижно закреплен на оси торсионного вывода 5. К концу штока на выходе «минусового» сильфона присоединена цилиндрическая пружина 6, закрепленная нижним основанием на компенсаторе 7 и работающая на растяжение. Каждому номинальному перепаду давления соответствует определенная пружина.
«Плюсовый» сильфон состоит из двух частей. Его первая часть (компенсатор 7, состоящий из трех дополнительных гофр и плоскостных клапанов 8) предназначена для уменьшения температурной погрешности прибора из-за изменения объема жидкости-наполнителя, обусловленного варьированием температуры окружающего воздуха. При изменении температуры окружающей среды и соответственно рабочей жидкости ее увеличивающийся объем перетекает через плоскостный клапан во внутреннюю полость сильфонов. Вторая часть «плюсового» сильфона рабочая и идентична по конструкции «минусовому» сильфону.
«Плюсовый» и «минусовый» сильфоны присоединены к основанию 9, на котором установлены крышки 10 и 11, образующие вместе с сильфонами «плюсовую» и «минусовую» камеры с соответствующими подводящими штуцерами 12 давления р + и рВнутренние объемы сильфонов, так же как и внутренняя полость основания 9, заполняются: жидкостью ПМС-5 для обычного и коррозионно-стойкого исполнений; составом ПЭФ-703110 – в кислородном варианте; дистиллированной водой – в варианте для пищевой промышленности и жидкостью ПМС-20 – для газового исполнения.
В конструкциях дифманометров, предназначенных для измерения давления газа, на шток одета манжета 13, движение среды организовано через дросселирующий канал 14. Регулированием размера проходного канала с помощью клапана 15 обеспечивается степень демпфирования измеряемого параметра.
Дифманометр работает следующим образом. Среды «плюсового» и «минусового» давления поступают через подводящие штуцеры в «плюсовую» и «минусовую» камеры соответственно. «Плюсовое» давление в большей степени воздействует на сильфон 1, сжимая его. Это приводит к перетоку находящейся внутри жидкости в «минусовый» сильфон, который растягивается и разжимает цилиндрическую пружину. Такая динамика происходит до уравновешивания сил взаимодействия между «плюсовым» сильфоном и парой – «минусовый» сильфон – цилиндрическая пружина. Мерой деформации сильфонов и их упругого взаимодействия служит перемещение штока, которое передается на рычаг и соответственно на ось торсионного вывода. На этой оси (рис. 2.23,а) закреплена рычажная система 16, обеспечивающая передачу вращения оси торсионного вывода к трибко-секторному механизму 17 и стрелке 18. Таким образом, воздействие на один из сильфонов приводит к угловому перемещению оси торсионного вывода и затем к повороту указательной стрелки прибора.
Регулировочным винтом 19 с помощью натяжной пружины 20 производится корректировка нулевой точки прибора.
Пробки 21 предназначены для продувки импульсных линий, промывки измерительных полостей сильфонного блока, слива рабочей среды, заполнения измерительных полостей разделительной жидкостью при вводе прибора в работу.
При односторонней перегрузке одной из камер происходит сжатие сильфона и перемещение штока. Клапан в виде уплотнительного резинового кольца 22 садится в гнездо основания, перекрывает переток жидкости из внутренней полости сильфона, и таким образом предотвращается его необратимая деформация. При непродолжительных перегрузках разность «плюсового» и «минусового» давления на сильфонный блок может достигать 25 МПа, а в отдельных типах приборов не превышать 32 МПа.
прибор может выпускаться как в общетеническом, так и в аммиачном (А), кислородном (К), коррозионно-стойком-пищевом (Пп) исполнениях.
Рис. 2.24Показывающий дифференциальный манометр на основе мембранной коробки:
1 – мембранная коробка;
2 – держатель «плюсового» давления;
3 – держатель «минусового» давления;
4 – корпус;
5 – передаточный механизм;
6 – стрелка;
7 – циферблаДостаточно широкое распространение получили приборы на основе мембран и мембранных коробок. В одном из вариантов (рис. 2.24) мембранная коробка 1, внутрь которой через подводящий штуцер держателя 2 поступает «плюсовое» давление, является чувствительным элементом дифманометра. Под воздействием этого давления смещается подвижный центр мембранной коробки.
«Минусовое» давление через подводящий штуцер держателя 3 подается внутрь герметичного корпуса 4 прибора и воздействует на мембранную коробку снаружи, создавая противодействие перемещению ее подвижного центра. Таким образом «плюсовое» и «минусовое» давления уравновешивают друг друга, а перемещение подвижного центра мембранной коробки свидетельствует о величине разностного – дифференциального давления. Этот сдвиг через передаточный механизм передается на указательную стрелку 6, которая на шкале циферблата 7 показывает измеряемое дифференциальное давление.
Диапазон измеряемого давления определяется свойствами мембран и ограничивается, как правило, в пределах от 0 до 0,4…40 кПа. При этом класс точности может составлять 1,5; 1,0; 0,6; 0,4, а в некоторых приборах 0,25.
Обязательная конструктивная герметичность корпуса определяет высокую защищенность от внешних воздействий и определяется в основном уровнем IP66.
В качестве материала для чувствительных элементов приборов используется бериллиевая и другие бронзы, а также нержавеющая сталь, для штуцеров, передаточных механизмов – медные сплавы, коррозионно-стойкие сплавы, включая нержавеющую сталь.
Приборы могут изготавливаться в корпусах малых (63 мм), средних (100 мм), и больших (160 мм) диаметров.
Мембранные показывающие дифференциальные манометры, как и приборы с мембранными коробками, используются для измерения малых значений дифференциального давления. Отличительная особенность – устойчивая работа при высоком статическом давлении.
Рис. 2.25Мембранные показывающие дифференциальные манометры с вертикальной мембраной:
1 – «плюсовая» камера;
2 – «минусовая» камера;
3 – чувствительная гофрированная мембрана;
4 – передающий шток;
5 – передаточный механизм;
6 – предохранительный клапанДифманометр с вертикальной мембраной (Рис. 2.25) состоит из «плюсовой» 1 и «минусовой» 2 рабочих камер, разделенных чувствительной гофрированной мембраной 3. Под воздействием давления мембрана деформируется, в результате чего перемещается ее центр вместе с закрепленным на нем передающим штоком 4. Линейное смещение штока в передаточном механизме 5 преобразуется в осевое вращение трибки, и соответственно указательной стрелки, отсчитывающей на шкале прибора измеряемое давление.
Для сохранения работоспособности чувствительной гофрированной мембраны при превышении максимального допустимого статического давления предусмотрен открывающийся предохранительный клапан 6. Причем конструкции этих клапанов могут быть различны. Соответственно такие приборы не могут использоваться, когда не допускается контакт сред из «плюсовой» и «минусовой» камер.
Рис. 2.26Мембранный показывающий дифференциальный манометр с горизонтальной мембраной:
1 – «плюсовая» камера;
2 – «минусовая» камера;
3 – входной блок;
4 - чувствительная гофрированная мембрана;
5 – толкатель;
6 – сектор;
7 – трибка;
8 – стрелка;
9 – циферблат;
10 – разделительный сильфонДифманометр с горизонтальной чувствительной мембраной показан на рис. 2.26. Входной блок 3 состоит из двух частей, между которыми устанавливается гофрированная мембрана 4. В ее центре закреплен толкатель 5, передающий перемещение от мембраны, через сектор 6, трибку 7 к стрелке 8. В этом передаточном звене линейное перемещение толкателя преобразуется в осевое вращение стрелки 8, отслеживающей на шкале циферблата 9 измеряемое давление. В этой конструкции применена сильфонная система вывода толкателя из зоны рабочего давления. Разделительный сильфон 10 своим основанием герметично закрепляется на центре чувствительной мембраны, а верхней частью также герметично прикрепляется к входному блоку. Такая конструкция исключает контакт измеряемой и окружающей сред.
Конструкция входного блока предусматривает возможность промывки или продувки «плюсовой» и «минусовой» камер и обеспечивает применение таких приборов для работы даже в условиях загрязненных рабочих сред.
Рис. 2.27Мембранный двухкамерный показывающий дифманометр:
1 – «плюсовая» камера;
2 – «минусовая» камера;
3 – передающий шток;
4 – сектор;
5 – трибка;
6 – коромыслоДвухкамерная система измерения дифференциального давления применена в конструкции прибора, показанного на рис. 2.27. Измеряемые потоки среды направляются в «плюсовую» 1 и «минусовую» 2 рабочие камеры, основными функциональными элементами которых являются автономные чувствительные мембраны. Преобладание одного давления над другим приводит к линейному перемещению передающего штока 3, которое через коромысло 6 передается соответственно на сектор 4, трибку 5 и систему стрелочной индикации измеряемого параметра.
Дифманометры с двухкамерной системой измерения используются для измерения малых дифференциальных давлений при высоких статических нагрузках, вязких сред и сред с твердыми вкраплениями.
Рис. 2.28.Дифманометр с магнитным преобразователем:
1 – поворотный магнит;
2 – стрелка;
3 – корпус;
4 – магнитный поршень;
5 – фторопластовый сальник;
6 – рабочий канал;
7 – пробка;
8 – диапазонная пружина;
9 – блок электроконтактовПринципиально иной показывающий дифманометр изображен на рис. 2.28. Поворотный магнит 1, на торце которого установлена стрелка 2, размещен в корпусе 3, выполненном из немагнитного металла. Магнитный поршень, уплотненный фторопластовым сальником 5, может передвигаться в рабочем канале 6. Магнитный поршень 4 со стороны «минусового» давления подпирает пробка 7, в свою очередь поджимаемая диапазонной пружиной 8.
Среда «плюсового» давления через соответствующий подводящий штуцер воздействует на магнитный поршень и сдвигает его вместе с пробкой 7 по каналу 6 до уравновешивания такого смещения противодействующими силами – «минусовым» давлением и диапазонной пружиной. Движение магнитного поршня приводит к осевому вращению поворотного магнита и соответственно указательной стрелки. Такой сдвиг пропорционален перемещению стрелки. Полное согласование достигается подбором упругих характеристик диапазонной пружины.
В дифманометре с магнитным преобразователем предусмотрен блок 9, замыкающий и размыкающий соответствующие контакты при прохождении вблизи его магнитного поршня.
Приборы с магнитным преобразователем устойчивы к воздействию статического давления (до 10 МПа). Они обеспечивают относительно невысокую погрешность (примерно 2 %) в диапазоне функционирования до 0,4 Мпа и используются для измерения давления воздуха, газов, различных жидкостей.[ http://jumas.ru/index.php?area=1&p=static&page=razdel_2_3_2]
Показывающий дифференциальный манометр на основе трубчатой пружины1 и 2 – держатели;
3 и 4 – трубчатые пружины;
5 и 8 – трибки;
6 – стрелка «плюсового» давления;
7 и 9 – шкалы избыточного давления;
10 – стрелка «минусового» давленияВ приборах такого типа на автономных держателях 1 и 2, соединенных вместе, установлены трубчатые пружины. Каждый держатель вместе с трубчатым чувствительным элементом образовывают автономные измерительные каналы. Среда «плюсового» давления поступает через входной штуцер держателя 2 в трубку 4, деформирует ее овал, в результате чего перемещается наконечник трубки и это перемещение через соответствующий зубчатый сектор передается на трибку 5. Эта трибка соответственно приводит к отклонению указательной стрелки 6, которая показывает на шкале 7 значение «плюсового» избыточного давления.
«Минусовое» давление посредством держателя 1, трубчатой пружины 3, трибки 8 приводит к перемещению циферблата 9, объединенного со стрелкой 10, которая на шкале 7 отслеживает значение измеряемого параметра.Дифференциальные манометры (далее – дифманометры), как отмечалось в п.1.3, являются названием отнесенным в нашей стране к показывающим приборам. (Устройства, обеспечивающие электрический выходной сигнал, пропорциональный измеряемому дифференциальному давлению имеют название измерительных преобразователей разности давлений). Хотя отдельные производители, а также некоторые специалисты-эксплуатанционщики измерительные преобразователи разности давлений также называют дифманометрами.
Дифманометры нашли основное применение в технологических процессах для измерения, контроля, регистрации и регулирования следующих параметров:
· расхода различных жидких, газообразных и парообразных сред по перепаду давления на разного рода сужающих устройствах (стандартных диафрагмах, соплах, включая сопла Вентури) и дополнительно вводимых в поток гидро- и аэродинамических сопротивлениях, например на преобразователях типа Annubar или на нестандартных гидро- и аэродинамических препятствиях;
· перепада - разности давления, вакуумметрических, избыточных, в двух точках технологического цикла, включая потери на фильтрах систем вентиляции и кондиционирования воздуха;
· уровня жидких сред по величине гидростатического столба.
Согласно ГОСТ 18140–84/23/, предельные номинальные перепады давления дифманометров-расходомеров, верхние пределы или сумма абсолютных значений верхних пределов измерений дифманометров-перепадомеров должны приниматься из следующего ряда:
10; 16; 25; 40; 63; 100; 160; 250; 400; 630 Па;
1; 1,6; 2,5; 4; 6,3; 10; 16; 25; 40; 63; 100; 160; 250; 400; 630 кПа;
1; 1,6; 2,5; 4; 6,3 МПа.
У дифманометров-расходомеров верхние пределы измерений выбираются из ряда, определяемого выражением:
А = а × 10n, (2.7)
где а – одно из чисел следующего ряда: 1; 1,25; 1,6; 2,0; 2,5; 3,2; 4; 5; 6,3; 8; n – целое (положительное или отрицательное) число или нуль.
Верхние пределы измерений или сумма абсолютных значений верхних пределов измерений дифманометров-уровнемеров следует выбирать и ряда:
0,25; 0,4; 0,63; 1,0; 1,6; 2,5; 4,0; 6,3; 10; 16; 25; 40; 63; 100 и 160 метров.
Одной из важных характеристик дифманометров является предельно допустимое рабочее избыточное давление, т. е. избыточное давление, которое могут выдержать рабочие каналы без необратимой деформации чувствительных элементов. Такое значение параметра принимается из следующего ряда:
25; 40; 63; 100; 160; 250; 400 и 630 кПа;
1; 1,6; 2,5; 4; 6,3; 10; 16; 25; 32; 40 и 63 МПа.
Нижние пределы измерений дифманометров-расходо-меров из-за неустойчивости работы стандартных сужающих устройств при малых Числах Рейнольдса измеряемого потока не должны превышать 30 % шкалы прибора. У преобразователей Annubar этот предел не превышает 10 % при сохранении объявленного класса точности (1,0).
Классы точности дифманометров принимаются из ряда: 0,25; 0,5; 1,0; 1,5.
Дифманометры должны иметь линейную шкалу при измерении уровня или перепада, линейную или квадратичную – при измерении расхода.
Дифманометры могут иметь условные обозначения, предложенные в методике п.1.4. Указываются модель прибора, причем на первом месте в обозначении фиксируется измеряемый параметр – тип измерителя (дифманометр), затем – принцип измерения и функция, предельный номинальный перепад, избыточное рабочее давление, класс точности. Например, дифманометр сильфонный показывающий в корпусе диаметром 160 мм, на предельный номинальный перепад давления 630 кПа, с рабочим избыточным давлением 32 МПа, класса точности 1,5 обозначается как
ДСП 160 (0…630 кПа)-32 МПа-1,5.
После этого допускается указывать дополнительные обозначения, например исполнение по «IP», измеряемой среде, присоединительным линиям и т. д.
Специфика измерения дифференциального давления обусловливает наличие в дифманометрах устройств продувки импульсных линий без необходимости демонтажа прибора или его узлов.
При испытаниях, а также в нормальных условиях отечественные дифманометры, согласно требований производителя, должны обеспечивать заданные метрологические характеристики после выдержки не менее 6-ти часов при температуре окружающей среды:
20 ± 2 или 23 ± 2 оС – для приборов классов точности 0,5; 0,6 и 1;
20 ± 5 или 23 ± 5 оС – для приборов класса точности 1,5.
Современные конструкции из-за снижения металлоемкости и совершенствования преобразователей позволяют сокращать время температурной адаптации у некоторых моделей до нескольких десятков минут.
Конкретная температура приведена в ТУ на измеритель и должна регистрироваться в техническом описании или паспорте на прибор.
Дифманометры, не защищенные от одностороннего воздействия, должны выдерживать перегрузку со стороны среды «плюсового» давления, превышающую предельные номинальные перепады на 10…50 %. «Плюсовым», в противовес «минусовому», называют большее из двух давлений среды, поступающей на вход дифференциального манометра.
Конструкции, у которых предусмотрены односторонние перегрузки, должны выдерживать десятикратные, стократные или двухсот пятидесятикратные односторонние перегрузки/23/.
Показывающие дифференциальные манометры на основе трубчатой пружины находят широкое применение для визуализации расхода различных сред, гидродинамических потерь в системах теплового отопления.
Дифференциальное давление, т. е. разность давлений р отсчитывается стрелкой на шкале циферблата.
Дифманометры такого типа, исходя из особенностей трубчатых пружин, обеспечивают работоспособность в промышленных условиях в диапазоне от 0 до 100 МПа.[ http://jumas.ru/index.php?area=1&p=static&page=razdel2_2_4]
Тематики
Синонимы
EN
- differential gauge pressure
- differential manometer
- differential pressure gage
- differential pressure indicator
- differential-pressure gage
DE
FR
Русско-французский словарь нормативно-технической терминологии > дифференциальный манометр
-
103 связь
связь сущ1. communication2. coupling аварийная связьdistress communicationаварийная связь с воздушным судномair distress communicationавиационная связьaeronautical telecommunicationаэродромная командная связьaerodrome control communicationаэродромная радиостанция командной связиaerodrome control radioбезредукторная обратная связьdirect feedbackбеспроводная связьwireless communicationблок связи автопилота с радиостанциейradio-autopilot couplerблок связи с курсовой системойcompass system coupling unitблок связи с радиолокационным оборудованиемradar coupling unitведение связиcommunications operationвыделение канала для связиchannel assignmentвызов на связь1. callup2. call-in 3. aircall гибкая обратная связьflexible feedbackглавная магистральная цепь связиmain trunk circuitдальность связиinitial contact rangeдатчик обратной связиfeedback transmitterдвухканальная дуплексная связьdouble channel duplexдвухканальная связьdouble channelдвухканальная симплексная связьdouble channel simplexдискретная система связиdiscrete communication systemдуплексная связь1. two-way communication2. duplex импульсная связьpulse radio communicationканал микроволновой связиmicrowave linkканал прямой радиолокационной связиdirect access radar channelканал радио связиradio channelканал связи воздух-земля1. downlink2. down link канал связи воздух - земляair-ground communication channelканал связи земля-воздухup linkканал связи на маршрутеon-course channelканал спутниковой связи воздух - земляaircraft-to-satellite channelконец связиoutконтрольный пункт связиcommunication check pointконтур обратной связиfeedback loopлиния циркулярной связиconference bridgeмежзональная связьinterarea communicationназемная линия связиlandlineобеспечение переговорной связиintercommunicationоборудование циркулярной связиconference facilitiesобратная связь1. feedback2. back coupling одноканальная связьsingle channel communicationоперативная связь авиакомпанийairline operational communicationоператор авиационной связиair communicatorотрицательная обратная связьnegative feedbackподдерживать связь1. carry out communication2. maintain communication позывной общего вызова на связьnet call signполет в связи с особыми обстоятельствамиspecial event flightположительная обратная связьpositive feedbackпомехи от авиационных средств связиair clutterпорядок действий при отказе средств связиcommunication failure procedureпроводная связьwire communicationпрямая связь между пунктамиdirect point-to-point connectionпункт выхода на связьpoint of callпункт переключения частоты связиchange-over pointрадиостанция диспетчерской связиcontrol radio stationрадиотелефонная связьradiotelephony communicationрадиотехнические средства связиradio communication equipmentрегиональный узел связиregional telecommunication hubрезервные средства связиalternative means of communicationсвязь воздух - земля1. air-to-ground communication2. air-ground communication связь для управления полетамиcontrol communicationсвязь на маршрутеen-route communicationсвязь по запросу с бортаair-initiated communicationсвязь по обеспечению регулярности полетовflight regularity communicationсвязь при руленииtaxiway linkсвязь типа запрос - ответrequest communicationСекция связиCommunication Section(ИКАО) сеть авиационной метеорологической факсимильной связиaviation meteorological facsimile networkсеть национальной факсимильной связиnational facsimile networkсеть прямой речевой связиdirect speech networkсигнал обратной связиfeedback signalсимплексная связь1. simplex communication2. one-way communication 3. simplex система внутренней связиinterphone systemсистема наземных линий связиlandline systemсистема обратной связи управления разворотом колес передней опоры шассиnosewheel steering follow-up systemсистема проводной связиwire systemсистема речевой связиvoice communication systemсистема связи аэропортаairport communication systemсистема связи воздух-воздухair-air netсистема сети радиотелефонной связиradiotelephony network system(воздушных судов) система телетайпной связиteletype broadcast systemсистема телефонной связиphone systemсистема управления с обратной связьюfeedback control systemслужба связиcommunication serviceсогласованный пункт выхода на связьagreed reporting pointспутник связиcommunication satelliteсредства связи1. means of communication2. communication facilities степень обратной связиamount of feedbackтелетайп наземной линии связиlandline teletypewriterтрос обратной связиfollow-up cableтрос обратной связи разворотаsteering feedback cableуровень помех речевой связиlevel of speech interferenceустанавливать связьestablish communicationцентр обеспечения воздушной связиair communication centerцепь обратной связиfeedback circuitцепь прямой речевой связиdirect speech circuitцепь связиcoupling circuitцепь спутниковой связиsatellite circuitцепь фиксированной авиационной связиaeronautical fixed circuitцифровая связьdigital communicationчартерный рейс в связи с особыми обстоятельствамиspecial event charterчастота вызова на связьcalling frequencyэксплуатационные правила радиотелефонной связиradiotelephony operating procedures -
104 трехфазный источник бесперебойного питания (ИБП)
трехфазный ИБП
-
[Интент]
Глава 7. Трехфазные ИБП... ИБП большой мощности (начиная примерно с 10 кВА) как правило предназначены для подключения к трехфазной электрической сети. Диапазон мощностей 8-25 кВА – переходный. Для такой мощности делают чисто однофазные ИБП, чисто трехфазные ИБП и ИБП с трехфазным входом и однофазным выходом. Все ИБП, начиная примерно с 30 кВА имеют трехфазный вход и трехфазный выход. Трехфазные ИБП имеют и другое преимущество перед однофазными ИБП. Они эффективно разгружают нейтральный провод от гармоник тока и способствуют более безопасной и надежной работе больших компьютерных систем. Эти вопросы рассмотрены в разделе "Особенности трехфазных источников бесперебойного питания" главы 8. Трехфазные ИБП строятся обычно по схеме с двойным преобразованием энергии. Поэтому в этой главе мы будем рассматривать только эту схему, несмотря на то, что имеются трехфазные ИБП, построенные по схеме, похожей на ИБП, взаимодействующий с сетью.
Схема трехфазного ИБП с двойным преобразованием энергии приведена на рисунке 18.
Рис.18. Трехфазный ИБП с двойным преобразованием энергииКак видно, этот ИБП не имеет почти никаких отличий на уровне блок-схемы, за исключением наличия трех фаз. Для того, чтобы увидеть отличия от однофазного ИБП с двойным преобразованием, нам придется (почти впервые в этой книге) несколько подробнее рассмотреть элементы ИБП. Мы будем проводить это рассмотрение, ориентируясь на традиционную технологию. В некоторых случаях будут отмечаться схемные особенности, позволяющие улучшить характеристики.
Выпрямитель
Слева на рис 18. – входная электрическая сеть. Она включает пять проводов: три фазных, нейтраль и землю. Между сетью и ИБП – предохранители (плавкие или автоматические). Они позволяют защитить сеть от аварии ИБП. Выпрямитель в этой схеме – регулируемый тиристорный. Управляющая им схема изменяет время (долю периода синусоиды), в течение которого тиристоры открыты, т.е. выпрямляют сетевое напряжение. Чем большая мощность нужна для работы ИБП, тем дольше открыты тиристоры. Если батарея ИБП заряжена, на выходе выпрямителя поддерживается стабилизированное напряжение постоянного тока, независимо от нвеличины напряжения в сети и мощности нагрузки. Если батарея требует зарядки, то выпрямитель регулирует напряжение так, чтобы в батарею тек ток заданной величины.
Такой выпрямитель называется шести-импульсным, потому, что за полный цикл трехфазной электрической сети он выпрямляет 6 полупериодов сингусоиды (по два в каждой из фаз). Поэтому в цепи постоянного тока возникает 6 импульсов тока (и напряжения) за каждый цикл трехфазной сети. Кроме того, во входной электрической сети также возникают 6 импульсов тока, которые могут вызвать гармонические искажения сетевого напряжения. Конденсатор в цепи постоянного тока служит для уменьшения пульсаций напряжения на аккумуляторах. Это нужно для полной зарядки батареи без протекания через аккумуляторы вредных импульсных токов. Иногда к конденсатору добавляется еще и дроссель, образующий совместно с конденсатором L-C фильтр.
Коммутационный дроссель ДР уменьшает импульсные токи, возникающие при открытии тиристоров и служит для уменьшения искажений, вносимых выпрямителем в электрическую сеть. Для еще большего снижения искажений, вносимых в сеть, особенно для ИБП большой мощности (более 80-150 кВА) часто применяют 12-импульсные выпрямители. Т.е. за каждый цикл трехфазной сети на входе и выходе выпрямителя возникают 12 импульсов тока. За счет удвоения числа импульсов тока, удается примерно вдвое уменьшить их амплитуду. Это полезно и для аккумуляторов и для электрической сети.
Двенадцати-импульсный выпрямитель фактически состоит из двух 6-импульсных выпрямителей. На вход второго выпрямителя (он изображен ниже на рис. 18) подается трехфазное напряжение, прошедшее через трансформатор, сдвигающий фазу на 30 градусов.
В настоящее время применяются также и другие схемы выпрямителей трехфазных ИБП. Например схема с пассивным (диодным) выпрямителем и преобразователем напряжения постоянного тока, применение которого позволяет приблизить потребляемый ток к синусоидальному.
Наиболее современным считается транзисторный выпрямитель, регулируемый высокочастотной схемой широтно-импульсной модуляции (ШИМ). Применение такого выпрямителя позволяет сделать ток потребления ИБП синусоидальным и совершенно отказаться от 12-импульсных выпрямителей с трансформатором.
Батарея
Для формирования батареи трехфазных ИБП (как и в однофазных ИБП) применяются герметичные свинцовые аккумуляторы. Обычно это самые распространенные модели аккумуляторов с расчетным сроком службы 5 лет. Иногда используются и более дорогие аккумуляторы с большими сроками службы. В некоторых трехфазных ИБП пользователю предлагается фиксированный набор батарей или батарейных шкафов, рассчитанных на различное время работы на автономном режиме. Покупая ИБП других фирм, пользователь может более или менее свободно выбирать батарею своего ИБП (включая ее емкость, тип и количество элементов). В некоторых случаях батарея устанавливается в корпус ИБП, но в большинстве случаев, особенно при большой мощности ИБП, она устанавливается в отдельном корпусе, а иногда и в отдельном помещении.
Инвертор
Как и в ИБП малой мощности, в трехфазных ИБП применяются транзисторные инверторы, управляемые схемой широтно-импульсной модуляции (ШИМ). Некоторые ИБП с трехфазным выходом имеют два инвертора. Их выходы подключены к трансформаторам, сдвигающим фазу выходных напряжений. Даже в случае применения относительно низкочастоной ШИМ, такая схема совместно с применением фильтра переменного тока, построенного на трансформаторе и конденсаторах, позволяет обеспечить очень малый коэффициент гармонических искажений на выходе ИБП (до 3% на линейной нагрузке). Применение двух инверторов увеличивает надежность ИБП, поскольку даже при выходе из строя силовых транзисторов одного из инверторов, другой инвертор обеспечит работу нагрузки, пусть даже при большем коэффициенте гармонических искажений.
В последнее время, по мере развития технологии силовых полупроводников, начали применяться более высокочастотные транзисторы. Частота ШИМ может составлять 4 и более кГц. Это позволяет уменьшить гармонические искажения выходного напряжения и отказаться от применения второго инвертора. В хороших ИБП существуют несколько уровней защиты инвертора от перегрузки. При небольших перегрузках инвертор может уменьшать выходное напряжение (пытаясь снизить ток, проходящий через силовые полупроводники). Если перегрузка очень велика (например нагрузка составляет более 125% номинальной), ИБП начинает отсчет времени работы в условиях перегрузки и через некоторое время (зависящее от степени перегрузки – от долей секунды до минут) переключается на работу через статический байпас. В случае большой перегрузки или короткого замыкания, переключение на статический байпас происходит сразу.
Некоторые современные высококлассные ИБП (с высокочакстотной ШИМ) имеют две цепи регулирования выходного напряжения. Первая из них осуществляет регулирование среднеквадратичного (действующего) значения напряжения, независимо для каждой из фаз. Вторая цепь измеряет мгновенные значения выходного напряжения и сравнивает их с хранящейся в памяти блока управления ИБП идеальной синусоидой. Если мгновенное значение напряжения отклонилось от соотвествующего "идеального" значения, то вырабатывается корректирующий импульс и форма синусоиды выходного напряжения исправляется. Наличие второй цепи обратной связи позволяет обеспечить малые искажения формы выходного напряжения даже при нелинейных нагрузках.
Статический байпас
Блок статического байпаса состоит из двух трехфазных (при трехфазном выходе) тиристорных переключателей: статического выключателя инвертора (на схеме – СВИ) и статического выключателя байпаса (СВБ). При нормальной работе ИБП (от сети или от батареи) статический выключатель инвертора замкнут, а статический выключатель байпаса разомкнут. Во время значительных перегрузок или выхода из строя инвертора замкнут статический переключатель байпаса, переключатель инвертора разомкнут. В момент переключения оба статических переключателя на очень короткое время замкнуты. Это позволяет обеспечить безразрывное питание нагрузки.
Каждая модель ИБП имеет свою логику управления и, соответственно, свой набор условий срабатывания статических переключателей. При покупке ИБП бывает полезно узнать эту логику и понять, насколько она соответствует вашей технологии работы. В частности хорошие ИБП сконструированы так, чтобы даже если байпас недоступен (т.е. отсутствует синхронизация инвертора и байпаса – см. главу 6) в любом случае постараться обеспечить электроснабжение нагрузки, пусть даже за счет уменьшения напряжения на выходе инвертора.
Статический байпас ИБП с трехфазным входом и однофазным выходом имеет особенность. Нагрузка, распределенная на входе ИБП по трем фазным проводам, на выходе имеет только два провода: один фазный и нейтральный. Статический байпас тоже конечно однофазный, и синхронизация напряжения инвертора производится относительно одной из фаз трехфазной сети (любой, по выбору пользователя). Вся цепь, подводящая напряжение к входу статического байпаса должна выдерживать втрое больший ток, чем входной кабель выпрямителя ИБП. В ряде случаев это может вызвать трудности с проводкой.
Сервисный байпас
Трехфазные ИБП имеют большую мощность и обычно устанавливаются в местах действительно критичных к электропитанию. Поэтому в случае выхода из строя какого-либо элемента ИБП или необходимости проведения регламентных работ (например замены батареи), в большинстве случае нельзя просто выключить ИБП или поставить на его место другой. Нужно в любой ситуации обеспечить электропитание нагрузки. Для этих ситуаций у всех трехфазных ИБП имеется сервисный байпас. Он представляет собой ручной переключатель (иногда как-то заблокированный, чтобы его нельзя было включить по ошибке), позволяющий переключить нагрузку на питание непосредственно от сети. У большинства ИБП для переключения на сервисный байпас существует специальная процедура (определенная последовательность действий), которая позволяет обеспечит непрерывность питания при переключениях.
Режимы работы трехфазного ИБП с двойным преобразованием
Трехфазный ИБП может работать на четырех режимах работы.
- При нормальной работе нагрузка питается по цепи выпрямитель-инвертор стабилизированным напряжением, отфильтрованным от импульсов и шумов за счет двойного преобразования энергии.
- Работа от батареи. На это режим ИБП переходит в случае, если напряжение на выходе ИБП становится таким маленьким, что выпрямитель оказывается не в состоянии питать инвертор требуемым током, или выпрямитель не может питать инвертор по другой причине, например из-за поломки. Продолжительность работы ИБП от батареи зависит от емкости и заряда батареи, а также от нагрузки ИБП.
- Когда какой-нибудь инвертор выходит из строя или испытывает перегрузку, ИБП безразрывно переходит на режим работы через статический байпас. Нагрузка питается просто от сети через вход статического байпаса, который может совпадать или не совпадать со входом выпрямителя ИБП.
- Если требуется обслуживание ИБП, например для замены батареи, то ИБП переключают на сервисный байпас. Нагрузка питается от сети, а все цепи ИБП, кроме входного выключателя сервисного байпаса и выходных выключателей отделены от сети и от нагрузки. Режим работы на сервисном байпасе не является обязательным для небольших однофазных ИБП с двойным преобразованием. Трехфазный ИБП без сервисного байпаса немыслим.
Надежность
Трехфазные ИБП обычно предназначаются для непрерывной круглосуточной работы. Работа нагрузки должна обеспечиваться практически при любых сбоях питания. Поэтому к надежности трехфазных ИБП предъявляются очень высокие требования. Вот некоторые приемы, с помощью которых производители трехфазных ИБП могут увеличивать надежность своей продукции. Применение разделительных трансформаторов на входе и/или выходе ИБП увеличивает устойчивость ИБП к скачкам напряжения и нагрузки. Входной дроссель не только обеспечивает "мягкий запуск", но и защищает ИБП (и, в конечном счете, нагрузку) от очень быстрых изменений (скачков) напряжения.
Обычно фирма выпускает целый ряд ИБП разной мощности. В двух или трех "соседних по мощности" ИБП этого ряда часто используются одни и те же полупроводники. Если это так, то менее мощный из этих двух или трех ИБП имеет запас по предельному току, и поэтому несколько более надежен. Некоторые трехфазные ИБП имеют повышенную надежность за счет резервирования каких-либо своих цепей. Так, например, могут резервироваться: схема управления (микропроцессор + платы "жесткой логики"), цепи управления силовыми полупроводниками и сами силовые полупроводники. Батарея, как часть ИБП тоже вносит свой вклад в надежность прибора. Если у ИБП имеется возможность гибкого выбора батареи, то можно выбрать более надежный вариант (батарея более известного производителя, с меньшим числом соединений).
Преобразователи частоты
Частота напряжения переменного тока в электрических сетях разных стран не обязательно одинакова. В большинстве стран (в том числе и в России) распространена частота 50 Гц. В некоторых странах (например в США) частота переменного напряжения равна 60 Гц. Если вы купили оборудование, рассчитанное на работу в американской электрической сети (110 В, 60 Гц), то вы должны каким-то образом приспособить к нему нашу электрическую сеть. Преобразование напряжения не является проблемой, для этого есть трансформаторы. Если оборудование оснащено импульсным блоком питания, то оно не чувствительно к частоте и его можно использовать в сети с частотой 50 Гц. Если же в состав оборудования входят синхронные электродвигатели или иное чувствительное к частоте оборудование, вам нужен преобразователь частоты. ИБП с двойным преобразованием энергии представляет собой почти готовый преобразователь частоты.
В самом деле, ведь выпрямитель этого ИБП может в принципе работать на одной частоте, а инвертор выдавать на своем выходе другую. Есть только одно принципиальное ограничение: невозможность синхронизации инвертора с линией статического байпаса из-за разных частот на входе и выходе. Это делает преобразователь частоты несколько менее надежным, чем сам по себе ИБП с двойным преобразованием. Другая особенность: преобразователь частоты должен иметь мощность, соответствующую максимальному возможному току нагрузки, включая все стартовые и аварийные забросы, ведь у преобразователя частоты нет статического байпаса, на который система могла бы переключиться при перегрузке.
Для изготовления преобразователя частоты из трехфазного ИБП нужно разорвать цепь синхронизации, убрать статический байпас (или, вернее, не заказывать его при поставке) и настроить инвертор ИБП на работу на частоте 60 Гц. Для большинства трехфазных ИБП это не представляет проблемы, и преобразователь частоты может быть заказан просто при поставке.
ИБП с горячим резервированием
В некоторых случаях надежности даже самых лучших ИБП недостаточно. Так бывает, когда сбои питания просто недопустимы из-за необратимых последствий или очень больших потерь. Обычно в таких случаях в технике применяют дублирование или многократное резервирование блоков, от которых зависит надежность системы. Есть такая возможность и для трехфазных источников бесперебойного питания. Даже если в конструкцию ИБП стандартно не заложено резервирование узлов, большинство трехфазных ИБП допускают резервирование на более высоком уровне. Резервируется целиком ИБП. Простейшим случаем резервирования ИБП является использование двух обычных серийных ИБП в схеме, в которой один ИБП подключен к входу байпаса другого ИБП.
Рис. 19а. Последовательное соединение двух трехфазных ИБП
На рисунке 19а приведена схема двух последовательно соединенным трехфазных ИБП. Для упрощения на рисунке приведена, так называемая, однолинейная схема, на которой трем проводам трехфазной системы переменного тока соответствует одна линия. Однолинейные схемы часто применяются в случаях, когда особенности трехфазной сети не накладывают отпечаток на свойства рассматриваемого прибора. Оба ИБП постоянно работают. Основной ИБП питает нагрузку, а вспомогательный ИБП работает на холостом ходу. В случае выхода из строя основного ИБП, нагрузка питается не от статического байпаса, как в обычном ИБП, а от вспомогательного ИБП. Только при выходе из строя второго ИБП, нагрузка переключается на работу от статического байпаса.
Система из двух последовательно соединенных ИБП может работать на шести основных режимах.
А. Нормальная работа. Выпрямители 1 и 2 питают инверторы 1 и 2 и, при необходимости заряжают батареи 1 и 2. Инвертор 1 подключен к нагрузке (статический выключатель инвертора 1 замкнут) и питает ее стабилизированным и защищенным от сбоев напряжением. Инвертор 2 работает на холостом ходу и готов "подхватить" нагрузку, если инвертор 1 выйдет из строя. Оба статических выключателя байпаса разомкнуты.
Для обычного ИБП с двойным преобразованием на режиме работы от сети допустим (при сохранении гарантированного питания) только один сбой в системе. Этим сбоем может быть либо выход из строя элемента ИБП (например инвертора) или сбой электрической сети.
Для двух последовательно соединенных ИБП с на этом режиме работы допустимы два сбоя в системе: выход из строя какого-либо элемента основного ИБП и сбой электрической сети. Даже при последовательном или одновременном возникновении двух сбоев питание нагрузки будет продолжаться от источника гарантированного питания.
Б. Работа от батареи 1. Выпрямитель 1 не может питать инвертор и батарею. Чаще всего это происходит из-за отключения напряжения в электрической сети, но причиной может быть и выход из строя выпрямителя. Состояние инвертора 2 в этом случае зависит от работы выпрямителя 2. Если выпрямитель 2 работает (например он подключен к другой электрической сети или он исправен, в отличие от выпрямителя 1), то инвертор 2 также может работать, но работать на холостом ходу, т.к. он "не знает", что с первым ИБП системы что-то случилось. После исчерпания заряда батареи 1, инвертор 1 отключится и система постарается найти другой источник электроснабжения нагрузки. Им, вероятно, окажется инвертор2. Тогда система перейдет к другому режиму работы.
Если в основном ИБП возникает еще одна неисправность, или батарея 1 полностью разряжается, то система переключается на работу от вспомогательного ИБП.
Таким образом даже при двух сбоях: неисправности основного ИБП и сбое сети нагрузка продолжает питаться от источника гарантированного питания.
В. Работа от инвертора 2. В этом случае инвертор 1 не работает (из-за выхода из строя или полного разряда батареи1). СВИ1 разомкнут, СВБ1 замкнут, СВИ2 замкнут и инвертор 2 питает нагрузку. Выпрямитель 2, если в сети есть напряжение, а сам выпрямитель исправен, питает инвертор и батарею.
На этом режиме работы допустим один сбой в системе: сбой электрической сети. При возникновении второго сбоя в системе (выходе из строя какого-либо элемента вспомогательного ИБП) электропитание нагрузки не прерывается, но нагрузка питается уже не от источника гарантированного питания, а через статический байпас, т.е. попросту от сети.
Г. Работа от батареи 2. Наиболее часто такая ситуация может возникнуть после отключения напряжения в сети и полного разряда батареи 1. Можно придумать и более экзотическую последовательность событий. Но в любом случае, инвертор 2 питает нагругку, питаясь, в свою очередь, от батареи. Инвертор 1 в этом случае отключен. Выпрямитель 1, скорее всего, тоже не работает (хотя он может работать, если он исправен и в сети есть напряжение).
После разряда батареи 2 система переключится на работу от статического байпаса (если в сети есть нормальное напряжение) или обесточит нагрузку.
Д. Работа через статический байпас. В случае выхода из строя обоих инверторов, статические переключатели СВИ1 и СВИ2 размыкаются, а статические переключатели СВБ1 и СВБ2 замыкаются. Нагрузка начинает питаться от электрической сети.
Переход системы к работе через статический байпас происходит при перегрузке системы, полном разряде всех батарей или в случае выхода из строя двух инверторов.
На этом режиме работы выпрямители, если они исправны, подзаряжают батареи. Инверторы не работают. Нагрузка питается через статический байпас.
Переключение системы на работу через статический байпас происходит без прерывания питания нагрузки: при необходимости переключения сначала замыкается тиристорный переключатель статического байпаса, и только затем размыкается тиристорный переключатель на выходе того инвертора, от которого нагрузка питалась перед переключением.
Е. Ручной (сервисный) байпас. Если ИБП вышел из строя, а ответственную нагрузку нельзя обесточить, то оба ИБП системы с соблюдением специальной процедуры (которая обеспечивает безразрыное переключение) переключают на ручной байпас. после этого можно производить ремонт ИБП.
Преимуществом рассмотренной системы с последовательным соединением двух ИБП является простота. Не нужны никакие дополнительные элементы, каждый из ИБП работает в своем штатном режиме. С точки зрения надежности, эта схема совсем не плоха:- в ней нет никакой лишней, (связанной с резервированием) электроники, соответственно и меньше узлов, которые могут выйти из строя.
Однако у такого соединения ИБП есть и недостатки. Вот некоторые из них.
- Покупая такую систему, вы покупаете второй байпас (на нашей схеме – он первый – СВБ1), который, вообще говоря, не нужен – ведь все необходимые переключения могут быть произведены и без него.
- Весь второй ИБП выполняет только одну функцию – резервирование. Он потребляет электроэнергию, работая на холостом ходу и вообще не делает ничего полезного (разумеется за исключением того времени, когда первый ИБП отказывается питать нагрузку). Некоторые производители предлагают "готовые" системы ИБП с горячим резервированием. Это значит, что вы покупаете систему, специально (еще на заводе) испытанную в режиме с горячим резервированием. Схема такой системы приведена на рис. 19б.
Рис.19б. Трехфазный ИБП с горячим резервированием
Принципиальных отличий от схемы с последовательным соединением ИБП немного.
- У второго ИБП отсутствует байпас.
- Для синхронизации между инвертором 2 и байпасом появляется специальный информационный кабель между ИБП (на рисунке не показан). Поэтому такой ИБП с горячим резервированием может работать на тех же шести режимах работы, что и система с последовательным подключением двух ИБП. Преимущество "готового" ИБП с резервированием, пожалуй только одно – он испытан на заводе-производителе в той же комплектации, в которой будет эксплуатироваться.
Для расмотренных схем с резервированием иногда применяют одно важное упрощение системы. Ведь можно отказаться от резервирования аккумуляторной батареи, сохранив резервирование всей силовой электроники. В этом случае оба ИБП будут работать от одной батареи (оба выпрямителя будут ее заряжать, а оба инвертора питаться от нее в случае сбоя электрической сети). Применение схемы с общей бетареей позволяет сэкономить значительную сумму – стоимость батареи.
Недостатков у схемы с общей батареей много:
- Не все ИБП могут работать с общей батареей.
- Батарея, как и другие элементы ИБП обладает конечной надежностью. Выход из строя одного аккумулятора или потеря контакта в одном соединении могут сделать всю системы ИБП с горячим резервирование бесполезной.
- В случае выхода из строя одного выпрямителя, общая батарея может быть выведена из строя. Этот последний недостаток, на мой взгляд, является решающим для общей рекомендации – не применять схемы с общей батареей.
Параллельная работа нескольких ИБПКак вы могли заметить, в случае горячего резервирования, ИБП резервируется не целиком. Байпас остается общим для обоих ИБП. Существует другая возможность резервирования на уровне ИБП – параллельная работа нескольких ИБП. Входы и выходы нескольких ИБП подключаются к общим входным и выходным шинам. Каждый ИБП сохраняет все свои элементы (иногда кроме сервисного байпаса). Поэтому выход из строя статического байпаса для такой системы просто мелкая неприятность.
На рисунке 20 приведена схема параллельной работы нескольких ИБП.
Рис.20. Параллельная работа ИБП
На рисунке приведена схема параллельной системы с раздельными сервисными байпасами. Схема система с общим байпасом вполне ясна и без чертежа. Ее особенностью является то, что для переключения системы в целом на сервисный байпас нужно управлять одним переключателем вместо нескольких. На рисунке предполагается, что между ИБП 1 и ИБП N Могут располагаться другие ИБП. Разные производителю (и для разных моделей) устанавливают свои максимальные количества параллеьно работающих ИБП. Насколько мне известно, эта величина изменяется от 2 до 8. Все ИБП параллельной системы работают на общую нагрузку. Суммарная мощность параллельной системы равна произведению мощности одного ИБП на количество ИБП в системе. Таким образом параллельная работа нескольких ИБП может применяться (и в основном применяется) не столько для увеличения надежности системы бесперебойного питания, но для увеличения ее мощности.
Рассмотрим режимы работы параллельной системы
Нормальная работа (работа от сети). Надежность
Когда в сети есть напряжение, достаточное для нормальной работы, выпрямители всех ИБП преобразуют переменное напряжение сети в постоянное, заряжая батареи и питая инверторы.
Инверторы, в свою очередь, преобразуют постоянное напряжение в переменное и питают нагрузку. Специальная управляющая электроника параллельной системы следит за равномерным распределением нагрузки между ИБП. В некоторых ИБП распределение нагрузки между ИБП производится без использования специальной параллельной электроники. Такие приборы выпускаются "готовыми к параллельной работе", и для использования их в параллельной системе достаточно установить плату синхронизации. Есть и ИБП, работающие параллельго без специальной электроники. В таком случае количество параллельно работающих ИБП – не более двух. В рассматриваемом режиме работы в системе допустимо несколько сбоев. Их количество зависит от числа ИБП в системе и действующей нагрузки.
Пусть в системе 3 ИБП мощностью по 100 кВА, а нагрузка равна 90 кВА. При таком соотношении числа ИБП и их мощностей в системе допустимы следующие сбои.
Сбой питания (исчезновение напряжения в сети)
Выход из строя любого из инверторов, скажем для определенности, инвертора 1. Нагрузка распределяется между двумя другими ИБП. Если в сети есть напряжение, все выпрямители системы работают.
Выход из строя инвертора 2. Нагрузка питается от инвертора 3, поскольку мощность, потребляемая нагрузкой меньше мощности одного ИБП. Если в сети есть напряжение, все выпрямители системы продолжают работать.
Выход из строя инвертора 3. Система переключается на работу через статический байпас. Нагрузка питается напрямую от сети. При наличии в сети нормального напряжения, все выпрямители работают и продолжают заряжать батареи. При любом последующем сбое (поломке статического байпаса или сбое сети) питание нагрузки прекращается. Для того, чтобы параллельная система допускала большое число сбоев, система должна быть сильно недогружена и должна включать большое число ИБП. Например, если нагрузка в приведенном выше примере будет составлять 250 кВА, то система допускает только один сбой: сбой сети или поломку инвертора. В отношении количества допустимых сбоев такая система эквивалентна одиночному ИБП. Это, кстати, не значит, что надежность такой параллельной системы будет такая же, как у одиночного ИБП. Она будет ниже, поскольку параллельная система намного сложнее одиночного ИБП и (при почти предельной нагрузке) не имеет дополнительного резервирования, компенсирующего эту сложность.
Вопрос надежности параллельной системы ИБП не может быть решен однозначно. Надежность зависит от большого числа параметров: количества ИБП в системе (причем увеличение количества ИБП до бесконечности снижает надежность – система становится слишком сложной и сложно управляемой – впрочем максимальное количество параллельно работающих модулей для известных мне ИБП не превышает 8), нагрузки системы (т.е. соотношения номинальной суммарной мощности системы и действующей нагрузки), примененной схемы параллельной работы (т.е. есть ли в системе специальная электроника для обеспечения распределения нагрузки по ИБП), технологии работы предприятия. Таким образом, если единственной целью является увеличение надежности системы, то следует серьезно рассмотреть возможность использование ИБП с горячим резервированием – его надежность не зависит от обстоятельств и в силу относительной простоты схемы практически всегда выше надежности параллельной системы.
Недогруженная система из нескольких параллельно работающих ИБП, которая способна реализвать описанную выше логику управления, часто также называется параллельной системой с резервированием.
Если нагрузка параллельной системы такова, что с ней может справиться меньшее, чем есть в системе количество ИБП, то инверторы "лишних" ИБП могут быть отключены. В некоторых ИБП такая логика управления подразумевается по умолчанию, а другие модели вообще лишены возможности работы в таком режиме. Инверторы, оставшиеся включенными, питают нагрузку. Коэффициент полезного действия системы при этом несколько возрастает. Обычно в этом режиме работы предусматривается некоторая избыточность, т.е. количестов работающих инверторов больше, чем необходимо для питания нагрузки. Тем самым обеспечивается резервирование. Все выпрямители системы продолжают работать, включая выпрямители тех ИБП, инверторы которых отключены.
В случае исчезновения напряжения в электрической сети, параллельная система переходит на работу от батареи. Все выпрямители системы не работают, инверторы питают нагрузку, получая энергию от батареи. В этом режиме работы (естественно) отсутствует напряжение в электрической сети, которое при нормальной работе было для ИБП не только источником энергии, но и источником сигнала синхронизации выходного напряжения. Поэтому функцию синхронизации берет на себя специальная параллельная электроника или выходная цепь ИБП, специально ориентированная на поддержание выходной частоты и фазы в соответствии с частотой и фазой выходного напряжения параллельно работающего ИБП.
Это режим, при котором вышли из строя один или несколько выпрямителей. ИБП, выпрямители которых вышли из строя, продолжают питать нагрузку, расходуя заряд своей батареи. Они выдает сигнал "неисправность выпрямителя". Остальные ИБП продолжают работать нормально. После того, как заряд разряжающихся батарей будет полностью исчерпан, все зависит от соотношения мощности нагрузки и суммарной мощности ИБП с исправными выпрямителями. Если нагрузка не превышает перегрузочной способности этих ИБП, то питание нагрузки продолжится (если у системы остался значительный запас мощности, то в этом режиме работы допустимо еще несколько сбоев системы). В случае, если нагрузка ИБП превышает перегрузочную способность оставшихся ИБП, то система переходит к режиму работы через статический байпас.
Если оставшиеся в работоспособном состоянии инверторы могут питать нагрузку, то нагрузка продолжает работать, питаясь от них. Если мощности работоспособных инверторов недостаточно, система переходит в режим работы от статического байпаса. Выпрямители всех ИБП могут заряжать батареи, или ИБП с неисправными инверторами могут быть полностью отключены для выполнения ремонта.
Работа от статического байпаса
Если суммарной мощности всех исправных инверторов параллельной системы не достаточно для поддержания работы нагрузки, система переходит к работе через статический байпас. Статические переключатели всех инверторов разомкнуты (исправные инверторы могут продолжать работать). Если нагрузка уменьшается, например в результате отключения части оборудования, параллельная система автоматически переключается на нормальный режим работы.
В случае одиночного ИБП с двойным преобразованием работа через статический байпас является практически последней возможностью поддержания работы нагрузки. В самом деле, ведь достаточно выхода из строя статического переключателя, и нагрузка будет обесточена. При работе параллельной системы через статический байпас допустимо некоторое количество сбоев системы. Статический байпас способен выдерживать намного больший ток, чем инвертор. Поэтому даже в случае выхода из строя одного или нескольких статических переключателей, нагрузка возможно не будет обесточена, если суммарный допустимый ток оставшихся работоспособными статических переключателей окажется достаточен для работы. Конкретное количество допустимых сбоев системы в этом режиме работы зависит от числа ИБП в системе, допустимого тока статического переключателя и величины нагрузки.
Если нужно провести с параллельной системой ремонтные или регламентные работы, то система может быть отключена от нагрузки с помощью ручного переключателя сервисного байпаса. Нагрузка питается от сети, все элементы параллельной системы ИБП, кроме батарей, обесточены. Как и в случае системы с горячим резервированием, возможен вариант одного общего внешнего сервисного байпаса или нескольких сервисных байпасов, встроенных в отдельные ИБП. В последнем случае при использовании сервисного байпаса нужно иметь в виду соотношение номинального тока сервисного байпаса и действующей мощности нагрузки. Другими словами, нужно включить столько сервисных байпасов, чтобы нагрузка не превышала их суммарный номинальных ток.
[ http://www.ask-r.ru/info/library/ups_without_secret_7.htm]Тематики
EN
Русско-английский словарь нормативно-технической терминологии > трехфазный источник бесперебойного питания (ИБП)
-
105 сигнализация
аварийная сигнализацияwarning indicationбленкерная сигнализацияflag alarmбленкер сигнализации отказаfailure flagблок сигнализации предельного кренаlimit bank warning unitблок управления аварийной сигнализацииwarning system control unitвизуальная сигнализацияvisual warningглавное табло сигнализации пожараmaster fire lightдатчик сигнализации положения шассиgear position glide-path transmitterзвуковая аварийная сигнализацияaudio warning deviceзвуковая сигнализацияaural warningлампа аварийной сигнализацииemergency lightлампа сигнализации выбораselection lightложная сигнализацияfalse warningпредупредительная сигнализацияcaution indicationпротивоугонная сигнализацияhijack alarmреле сигнализации отказа питанияpower fail relayрешетка системы сигнализацииpressure padsсветовая аварийная сигнализацияlight alarmсветовая сигнализацияannunciationсигнализация аварийной обстановки в полетеair alert warningсигнализация захвата цели радиолокаторомradar lock-on indicationсигнализация обледененияice warningсигнализация об опасном сближении с землейground proximity warningсигнализация о пожареfire warningсигнализация отказаfail warningсигнализация отказовfault annunciationсигнализация самопроизвольного ухода с заданной высотыaltitude alert warningсистема аварийной сигнализацииemergency warning systemсистема автоматической сигнализации углов атаки, скольжения и перегрузокangle-of-attack, slip and acceleration warning systemсистема обнаружения и сигнализации пожараfire detection systemсистема общей аварийной сигнализацииgeneral alarm systemсистема пожарной сигнализацииfire warning systemсистема предупредительной сигнализации1. caution system2. warning system система предупредительной сигнализации воздушного суднаaircraft warning systemсистема сигнализации опасного скольженияslip warning systemсистема сигнализации опасной высотыaltitude alert systemсистема сигнализации опасности захватаhijack alarm system(воздушного судна) система сигнализации о приближении к сваливаниюstall warning system(на крыло) система сигнализации отказа приборовinstrument failure warning systemсистема сигнализации отклонения от курсаdeviation warning systemсистема сигнализации перегрузокacceleration warning systemсистема сигнализации предельных углов атакиangle-of-attack warning systemсистема сигнализации рассогласования закрылковflaps asymmetry warning systemсистема сигнализации сближенияproximity warning system(воздушных судов) табло предупредительной сигнализацииcaution annunciatorтабло сигнализации опасной вибрацииvibration caution annunciatorтабло сигнализации опасной высотыaltitude alert annunciatorтабло сигнализации отказаfailure warning lightтабло сигнализации отказа системы сравненияcomparison warning lightтабло сигнализации пожараfire warning lightтабло сигнализации положения реверса тягиthrust reverser lightустройство сигнализации о вторженииintrusion detection deviceцвет аварийной сигнализацииwarning light colorцепь сигнализацииwarning circuit -
106 радиолокационный
радиолокационная прилradar navigationавтоматическая аэродромная радиолокационная системаautomated radar terminal systemаэродром без радиолокационных средствnonradar aerodromeаэродромная радиолокационная станцияterminal radarближняя радиолокационная станцияinner locatorблок связи с радиолокационным оборудованиемradar coupling unitблок совмещения радиолокационного изображения с картойchart-matching deviceбортовая метеорологическая радиолокационная системаradar airborne weather systemбортовая радиолокационная станцияairborne radarглавная радиолокационная станцияmaster radar stationграница радиолокационного обнаруженияradar warning lineдальность радиолокационного сопровожденияradar-tracking rangeдальняя радиолокационная станцияouter locatorдиспетчер радиолокационного контроляradar controllerдоплеровский радиолокационный автоштурманradar Doppler automatic navigatorзона радиолокационного обслуживанияradar service areaканал прямой радиолокационной связиdirect access radar channelкартографирование путем радиолокационного обзора местностиlong range mappingконечный пункт радиолокационного контроляterminal radar controlмаршрут вылета с радиолокационным обеспечениемradar departure routeмаршрут прилета с радиолокационным обеспечениемradar arrival routeмасштаб развертки на экране радиолокационной станцииrange marker spacingметеорологическая радиолокационная станцияmeteorological radar stationминимум эшелонирования при радиолокационном обеспеченииradar separation minimaнаведение по лучу радиолокационной станцииradar beam ridingназемная радиолокационная станцияground-based radarобзор местности радиолокационными средствамиradar mappingобработка радиолокационной информацииradar data processingоператор радиолокационной станцииradarmanопознавание радиолокационной отметкиradar blip identificationопределение дальности радиолокационным методомradar rangingотображение радиолокационного обзора земной поверхностиradar ground mappingотраженный радиолокационный сигналradar echoпараболическая радиолокационная антеннаradar dishпередача кода радиолокационного опознаванияradar identification transferпередача радиолокационного диспетчерского управленияradar transfer of controlподвижная радиолокационная станцияmobile locatorпосадочный минимум при радиолокационном обеспеченииradar landing minimaпосадочный радиолокационный маякradar homing beaconприводная радиолокационная системаradar homing systemрадиолокационная антеннаradar antennaрадиолокационная информацияradar dataрадиолокационная карта1. radar chart2. radar map радиолокационная отметка целиradar plotрадиолокационная системаradar systemрадиолокационная система бокового обзораradar side looking systemрадиолокационная система захода на посадкуapproach radar systemрадиолокационная система наведенияradar guidance systemрадиолокационная система навигацииradar navigation systemрадиолокационная система со сканирующим лучомradar scanning beam systemрадиолокационная система точного захода на посадкуprecision approach radar systemрадиолокационная станция1. position-fixing station2. position-radar station 3. compass locator 4. radar set радиолокационная станция дальнего действияlong-range radarрадиолокационная станция наблюденияindication radarрадиолокационная станция наведения1. control radar2. guidance radar радиолокационная станция сопровожденияradar-tracking stationрадиолокационная установкаradar installationрадиолокационное зондированиеradar soundingрадиолокационное наблюдениеradar observationрадиолокационное наблюдение грозовой обстановкиradar storm observationрадиолокационное наблюдение с помощью зондаradarsonde observationрадиолокационное наведение1. radar homing2. radar guidance 3. radar vectoring радиолокационное обнаружение грозового фронтаradar storm detectionрадиолокационное оборудованиеradar facilitiesрадиолокационное обслуживаниеradar serviceрадиолокационное опознавание1. beam identification2. radar identification радиолокационное отражение от поверхности моряradar sea echoрадиолокационное отражение от поверхности сушиradar terrain echoрадиолокационное прогнозирование погодыradar weather forecastрадиолокационное сопровождениеradar trackingрадиолокационное управление1. radar monitoring2. radar handover радиолокационное эшелонированиеradar separationрадиолокационный высотомер1. radar height finder2. radio altimeter радиолокационный грозоотметчикweather radar indicatorрадиолокационный дальномер1. radar range finder2. radar ranging set радиолокационный индикаторradar displayрадиолокационный контактradar contactрадиолокационный контрольradar controlрадиолокационный курсradar headingрадиолокационный маркер1. ramark2. radar marker 3. locator marker радиолокационный маяк1. radar approach beacon2. racon радиолокационный маяк - запросчикradar interrogator beaconрадиолокационный маяк - ответчикradar transponder beaconрадиолокационный метод определения параметров ветраrawinрадиолокационный обзорradar scanningрадиолокационный обзор в полетеinflight radar scanningрадиолокационный обзор земной поверхностиradar ground mappingрадиолокационный ответradar responseрадиолокационный пеленгаторradar direction finderрадиолокационный передатчикradar transmitterрадиолокационный поискradar searchрадиолокационный указательradar indicatorрадиолокационный указатель целиradar target indicatorрезервная радиолокационная системаradar backup systemсводка погоды по данным радиолокационного наблюденияradar weather reportсеть радиолокационных станцийradar netсистема радиолокационного обзора местностиmapping radar systemсистема радиолокационного обнаруженияradar warning netсредняя радиолокационная станцияmiddle locatorсхема захода на посадку без применения радиолокационных средствnonprecision approach procedureусловия без радиолокационного контроляnonradar environmentусловия с использованием радиолокационного контроляradar environmentустройство развертки радиолокационного изображенияradar scannerцентр обработки радиолокационной информацииradar processing centerцентр передачи радиолокационной информацииradar information centerцентр радиолокационного управления заходом на посадкуradar approach controlцифровой радиолокационный тренажерdigital radar simulatorэшелонирование без радиолокационных средствnonradar separation -
107 двигатель
двигатель сущ1. engine2. motor авиационное топливо для турбореактивных двигателейaviation turbine fuelавиационный двигатель воздушного охлажденияair-cooled engineагрегат с приводом от двигателяengine-driven unitакустическая характеристика двигателяengine acoustic performanceасимметричная тяга двигателейasymmetric engines powerбалка крепления двигателя1. engine mount beam2. engine lifting beam бесшумный двигательquiet engineблок входного направляющего аппарата двигателяguide vane assemblyблок управления створками капота двигателяcowl flap actuation assemblyбоковой двигательside engineвентилятор двигателяengine fanвзлет на режимах работы двигателей, составляющих наименьший шумnoise abatement takeoffвзлет при всех работающих двигателяхall-engine takeoffвнутренний контур двигателяengine coreвоздушная система запуска двигателейair starting systemвоздушное судно с газотурбинными двигателямиturbine-engined aircraftвоздушное судно с двумя двигателямиtwin-engined aircraftвоздушное судно с двумя и более двигателямиmultiengined aircraftвоздушное судно с одним двигателем1. one-engined aircraft2. single-engined aircraft воздушное судно с поршневым двигателемpiston-engined aircraftвоздушное судно с турбовинтовыми двигателямиturboprop aircraftвоздушное судно с турбореактивными двигателямиturbojet aircraftвремя обкатки двигателяengine runin timeвремя опробования двигателя на землеengine ground test timeвстречный запуск двигателяengine relightвыбег двигателя1. run-down engine operation2. engine rundown выбор режима работы двигателяselection of engine modeвыводить двигатель из режима реверсаunreverse an engineвыключенный двигательengine offвыполнять холодный запуск двигателяblow down an engineвысота повторного двигателяrestarting altitudeвысотность двигателяengine critical altitudeвысотные характеристики двигателяengine altitude performancesвысотный двигательaltitude engineвысотный корректор двигателяmixture control assemblyгазотурбинный двигатель1. gas turbine2. turbine engine 3. gas turbine engine газотурбинный двигатель с осевым компрессоромaxial-flow итьбю.gas turbine engineгенератор с приводом от двигателяengine-driven generatorглавный вал двигателяengine drive shaftглушитель двигателяengine detunerгондола двигателяengine nacelleгондола двигателя на пилонеside engine nacelleгонка двигателя на землеground runupдавать двигателю полный газopen up an engineдвигатель азимутальной коррекцииazimuth torque motorдвигатель без наддуваself-aspirating engineдвигатель внутреннего сгорания1. internal combustion2. combustion engine двигатель водяного охлажденияwater-cooled engineдвигатель горизонтальной коррекцииleveling torque motorдвигатель магнитной коррекцииslaving torque motorдвигатель на режиме малого газаidling engineдвигатель поперечной коррекцииroll erection torque motorдвигатель продольной коррекцииpitch erection torque motorдвигатель, расположенный в крылеin-wing mountedдвигатель с большим ресурсомlonger-lived engineдвигатель с высокой степенью двухконтурностиhigh bypass ratio engineдвигатель с высокой степенью сжатияhigh compression ratio engineдвигатель с левым вращением ротораleft-hand engineдвигатель с низкой степенью двухконтурностиlow bypass ratio engineдвигатель со свободной турбинойfree-turbine engineдвигатель с пониженной тягойderated engineдвигатель с правым вращением ротораright-hand engineдвигатель типа двухрядная звездаdouble-row radial engineдвигатель, установленный в мотогондолеnaccele-mounted engineдвигатель, установленный вне фюзеляжаoutboard engineдвигатель, установленный в отдельной гондолеpodded engineдвигатель, установленный в фюзеляжеin-board engineдвигатель, установленный на крылеon-wing mounted engineдвигатель, установленный на пилонеpylon-mounted engineдвухвальный газотурбинный двигательtwo-shaft turbine engineдвухкаскадный двигательtwo-spool engineдвухконтурный двигательbypass engineдвухконтурный турбовентиляторный двигательducted-fan engineдвухконтурный турбореактивный двигатель1. bypass turbojet2. double-flow engine 3. dual-flow turbojet engine двухконтурный турбореактивный двигатель с дожиганием топлива во втором контуреduct burning bypass engineдвухроторный двигательtwo-rotor engineдефлектор двигателяengine baffleдоводка двигателяengine developmentдожигать топливо, форсировать двигательreheatдозвуковой двигательsubsonic engineдренажная система двигателейengine vent systemзаброс оборотов двигателя1. engine overspeed2. overspeed зависание оборотов двигателяengine speed holdupзаклинивание двигателяengine seizureзамок пазового типа лопатки двигателяgroove-type blade attachmentзамок штифтового типа лопатки двигателяpig-type blade attachmentзапускать двигатель1. start an engine2. light an engine 3. fire an engine запускать двигатель в полетеrestart the engine in flightзапуск двигателя1. engine starting2. starting engine operation запуск двигателя с забросом температурыengine hot starting(выше допустимой) звездообразный двигательradial engineизбыток тяги двигателяengine thrust marginимитированный отказ двигателяsimulated engine failureиспытание двигателя в полетеinflight engine testкапот двигателяengine cowlклапан запуска двигателяengine start valveкнопка запуска двигателяengine starter buttonкнопка запуска двигателя в воздухеflight restart buttonкожух двигателяengine jacketконтроль состояния двигателейengines trend monitoringкритический двигательcritical powerplantкрыльевой двигательwing engineлевый внешний двигательport-side engineлевый крайний двигательport-outer engineложный запуск двигателя1. engine false starting2. engine wet starting максимально допустимый заброс оборотов двигателяmaximum engine overspeedмаксимальный потолок при всех работающих двигателяхall-power-units ceilingметод прогнозирования шума реактивных двигателейjet noise prediction techniqueмеханизм измерителя крутящего момента на валу двигателяengine torquemeter mechanismмодуль двигателяengine moduleмодульная конструкция двигателяmodular engine designмодульный двигательmodular engineмуфта сцепления двигателя с несущим винтом вертолетаrotor clutch assemblyнабор высоты при всех работающих двигателяхall-engine-operating climbнаработка двигателяengine operating timeнесущий винт с приводом от двигателяpower-driven rotorобдув генератора двигателяengine generator coolingобкатка двигателяrun-in testобкатывать двигательrun in an engineоблицовка каналов двигателяengine duct treatmentодновальный газотурбинный двигательsingle-shaft turbine engineодновременный запуск всех двигателейall-engines startingоднокаскадный двигательsingle-rotor engineокончательный вариант двигателяdefinitive engineопорное кольцо вала двигателяengine backup ringопробование двигателяengine run-up operationопробовать двигательrun up an engineостанавливать двигатель1. close down an engine2. shut down an engine отбойный щит для опробования двигателейengine check padотказавший двигатель1. dead engine2. engine out отказ двигателяengine failureотладка двигателяengine setting-upотрыв двигателяengine tearwayотсек двигателяengine compartmentохлаждение двигателяengine coolingпадение оборотов двигателяengine speed lossперебои в работе двигателя1. rough engine operations2. engine trouble перегородка двигателяengine bulkheadпилон двигателяengine pylonподкрыльевой двигательunderwing engineподъемный реактивный двигательlift jet engineпожар внутри двигателяengine internal fineполет на одном двигателеsingle-engined flightполет с выключенным двигателемengine-off flightполет с выключенными двигателямиpower-off flightполет с несимметричной тягой двигателейasymmetric flightполет с работающим двигателемengine-on flightполет с работающими двигателями1. powered flight2. power-on flight положение при запуске двигателейstarting-up positionпоршневой двигатель1. piston engine2. reciprocating engine порядок выключения двигателяcut-off engine operationпорядок запуска двигателя1. starting procedure2. engine starting procedure посадка в режиме авторотации в выключенным двигателемpower-off autorotative landingпосадка с отказавшим двигателем1. engine-out landing2. dead-engine landing посадка с работающим двигателемpower-on landingправый внешний двигательstarboard engineпредварительная гонка двигателяpreliminary runupпредполетное опробование двигателяpreflight engine runпри внезапном отказе двигателяwith an engine suddenly failedпри выключенных двигателяхpower-offпри любом отказе двигателяunder any kind of engine failureприспособление для подъема двигателяengine lifting deviceприставка двигателяengine adapterпрогревать двигательwarm up an engineпрогретый двигательwarmed-up engineпродолжительность работы двигателя на взлетном режимеfull-thrust durationпрокладка в системе двигателяengine gasketпроставка двигателяengine retainerпротивообледенительная система двигателей1. engine deicing system(переменного действия) 2. engine anti-icing system (постоянного действия) противопожарный экран двигателяengine fire shieldпрямоточный воздушно-реактивный двигатель1. ramjet engine2. ramjet 3. athodyd прямоточный двигатель1. self-propelling duct2. aeroduct пусковой двигательstarting engineработа в режиме запуска двигателяengine start modeработа двигателяengine runningработа двигателя на режиме малого газаidling engine operationработающий двигательengine onрабочее колесо двигателяengine impellerразрегулированный двигательrough engineрама крепления двигателяengine mountраскрутка двигателяengine crankingрасход воздуха через двигательengine airflowреактивный двигательjet engineрегулирование зажигания двигателяengine timingрегулировать двигатель до заданных параметровadjust the engineрегулировка двигателяengine adjustmentрегулятор предельных оборотов двигателяengine limit governorрельсы закатки двигателяengine mounting railsрычаг раздельного управления газом двигателяengine throttle control leverсектор газа двигателяengine throttleсистема блокировки управления двигателемengine throttle interlock systemсистема запуска двигателей1. engine starting system2. engine start system система индикации виброперегрузок двигателяengine vibration indicating systemсистема суфлирования двигателяengine breather systemсистема управления двигателемengine control systemскорость при всех работающих двигателяхall engines speedскорость при отказе критического двигателяcritical engine failure speedснижать режим работы двигателяslow down an engineснижение с работающим двигателемpower-on descentснижение с работающими двигателямиpower-on descend operationснижение шума при опробовании двигателей на землеground run-up noise abatementс приводом от двигателяpower-operatedсредний двигательcenter engineстартер двигателяengine starterстворка капота двигателяengine cowl flapстенд для испытания двигателейengine test benchструя двигателяengine blastтележка для транспортировки двигателейengine dollyтопливная система двигателяengine fuel systemтопливо для реактивных двигателейjet fuelтрехвальный турбовентиляторный двигательthree-rotor turbofan engineтрехконтурный турбореактивный двигательthree-flow turbojet engineтрехстрелочный указатель двигателяthree-pointer engine gageтряска двигателяengine vibrationтурбовальный двигатель1. turboshaft2. turboshaft engine турбовентиляторный двигатель1. turbofan2. fanjet 3. turbofan engine 4. fan-type engine турбовентиляторный двигатель с высокой степенью двухконтурностиhigh-bypass fanjetтурбовентиляторный двигатель с низким расходомlow-consumption fanjetтурбовинтовой двигательturboprop engineтурбореактивный двигатель1. turbojet2. turboprop 3. turbojet engine тяга двигателяengine thrustубирать обороты двигателяdecelerate an engineузел закатки двигателяengine roll-in fittingузел крепления двигателяengine mounting attachmentузел подвески двигателяengine attach fittingуказатель вибрации двигателяengine vibration indicatorуказатель оборотов двигателяengine tachometer indicatorуменьшение мощности двигателей воздушного суднаaircraft power reductionустанавливать двигательinstall an engineустановка двигателяengine installationустановка режима работы двигателяthrottle settingустановленный на двигателеengine-mountedфильтр двигателяengine screenфланец отбора воздуха от двигателяengine air bleed flangeфорсажный двигательboost engineфорсированный двигательuprated engineхарактеристики двигателяengine performancesхвостовая часть гондолы двигателяaft power nacelleхолодная прокрутка двигателяengine dry startingцапфа подвески двигателяengine mounting trunnionцикл двигателяengine cycleцилиндр двигателяengine cylinderцифровой электронный регулятор режимов работы двигателяdigital engine controlчисло оборотов двигателя на взлетном режимеengine takeoff speedшкворень крепления двигателяengine attachment pilotштопор при неработающих двигателяхpowerless spinштопор при работающих двигателях1. powered spin2. power spin электронная система управления двигателемelectronic engine control systemэмиссия от двигателейengine emission -
108 контроль
контроль сущ1. monitoring2. surveillance автоматический контрольself-testавтоматический контроль траекторииautomatic path controlалгоритм контроля ошибокerror checking algorithmблок контроляmonitorблок контроля скорости пробега по землеground run monitorведомость технического контроляchecklistвизуальный контрольvisual monitoringвстроенная система контроляintegrated control systemвстроенный контрольintegral testдиспетчер радиолокационного контроляradar controllerзаход на посадку на посадку под контролем наземных средствground controlled approachзона диспетчерского контроляcontrol zoneзона контроля аэродрома диспетчерской службойaerodrome control sectorзона полного диспетчерского контроляpositive control zoneзона таможенного контроляcustoms surveillance zoneиммиграционный контроль1. immigration2. immigration control комплексная система контроля воздушного пространстваintegrated system of airspace controlконечный пункт радиолокационного контроляterminal radar controlконтроль в зонеarea watchконтроль за выполнением технического обслуживанияmaintenance supervisionконтроль за использованием территорииland use controlконтроль за полетомflight monitoringконтроль за производством полетовoperating supervisionконтроль за ходом полетаflight supervisionконтроль за ходом расследованияcontrol of an investigationконтроль качества изготовления воздушных судовaircraft production inspectionконтроль полетаflight watchконтроль состояния двигателейengines trend monitoringконтроль состояния посевов по пути выполнения основного заданияassociated crop control operationконтроль уровня шумаnoise controlлетать под контролемfly under the supervision ofмедицинский контрольhealth controlмеждународный контроль частотinternational frequency monitoringметод контроля шумаnoise control techniqueметоды неразрушающего контроляnondestructing testingнепосредственный контрольdirect controlнепрерывный контрольcontinuous watchоборудование встроенного контроляbuilt-in test equipmentоборудование системы контроля окружающей средыenvironmental control system equipmentорган контроля летной годностиairworthiness authorityосуществлять контроль за ходом полетаexercise flight supervisionотдел контроляinspection departmentпанель контроля хода полетаflight deckпаспортный контрольpassport controlполет для контроля состояния посевовcrop control flightполет для контроля состояния посевов с воздухаcrop control operationпорядок контроляclearance procedureпрекращать контроль воздушного суднаrelease the aircraftпункт контроля на наличие металлических предметовmetal-detection gatewayрадиолокатор контроля за рулениемtaxi radarрадиолокационный контрольradar controlрамочная антенна контроля курсаheading control loopсанитарный контроль воздушных судовaircraft sanitary controlСектор контроля за документациейDocument Control UnitСекция контроля за выполнением бюджетаBudget Control Section(ИКАО) система автоматического контроля1. automatic monitor system2. automatic test system система встроенного контроляbuild-in test systemсистема контроля взлетаtakeoff monitoring systemсистема контроля за летной годностьюairworthiness control systemсистема контроля за работой визуальных средствsystem of monitoring visual aids(на аэродроме) система контроля количества и расхода топливаfuel indicating systemтаможенный контрольcustoms surveillanceусловия без радиолокационного контроляnonradar environmentусловия с использованием радиолокационного контроляradar environmentцветовая система таможенного контроляcolor coded systemцепь встроенного контроляbuilt-in test circuitцепь контроляmonitoring circuitштуцер контроля заправкиfilling check connectionэксперт по контролю за качествомquality control expert -
109 магнитопорошковый дефектоскоп
магнитопорошковый дефектоскоп
Магнитный дефектоскоп, основанный на магнитопорошковом методе магнитного неразрушающего контроля
[ ГОСТ 24450-80]
магнитопорошковый дефектоскоп
Магнитный прибор неразрушающего контроля, предназначенный для обнаружения с помощью магнитного порошка несплошностей и магнитных неоднородностей материала намагниченных объектов контроля.
Примечание
Основным элементом магнитопорошкового дефектоскопа является намагничивающее устройство. В зависимости от назначения и конструктивного исполнения дефектоскопа в него дополнительно могут входить следующие функциональные устройства:
блок питания;
система или блок измерения намагничивающего тока или напряженности магнитного поля;
система или блок управления операциями контроля;
система самоконтроля работоспособности дефектоскопа;
устройства автоматизации процессов контроля;
контактное зажимное устройство;
устройство для нанесения на объекты контроля магнитного индикатора;
устройства для осмотра объектов контроля;
вспомогательные устройства, приборы и приспособления;
размагничивающее устройство.
[Система неразрушающего контроля. Виды (методы) и технология неразрушающего контроля. Термины и определения (справочное пособие). Москва 2003 г.]Тематики
EN
Русско-английский словарь нормативно-технической терминологии > магнитопорошковый дефектоскоп
-
110 управление экономической системой (кибернетический аспект)
управление экономической системой (кибернетический аспект)
1. Переработка экономической информации (социально-экономической) и принятие на этой основе решений о воздействии на экономическую систему. 2. Реализация этих решений. При данном подходе экономика рассматривается как кибернетическая система, управление которой включает два элемента: определение траектории состояний системы (т.е. формирование цели и указание путей ее достижения) и удержание системы на этой траектории путем регулирования. Соответственно, в подсистеме управления кибернетической системы (см. Управляющая система) выделяются два блока: блок определения целей и блок регулирования (регулятор). Существуют три основных вида управления:а) программное (или жесткое), б) регулирование поведения управляемого объекта и в) саморегулирование, т.е. автоматическое регулирование (самонастройка или самоорганизация). (Рис. У.1) Управление (регулирование) деятельностью хозяйственных систем может рассматриваться, с точки зрения кибернетики, двояко. (При этом учитывается, что речь идет не о технических системах, а о системах социально-экономических, в которых огромную роль играют субъективные факторы, интересы людей). Во-первых, то или иное желательное поведение управляемой системы и ее элементов (хозяйственных звеньев) достигается прямым управляющим воздействием (плановым заданием, запретом какого-либо действия); собственные интересы людей, составляющих данное хозяйственное звено, при этом во внимание не принимаются (хотя, естественно, такое воздействие может на самом деле служить и их интересам, в широком смысле, как интересам членов общества вообще). Это так называемое административное управление. Во-вторых, создаются экономические условия, заинтересовывающие хозяйственные звенья в желательном поведении системы (с помощью установления соответствующих цен, нормативов и доведения другой информации). Это так называемые экономические методы управления. Административное управление, таким образом, ближе к программному, при экономическом же управлении более активная роль отводится саморегулированию, действию рыночных механизмов. В научной литературе можно встретить противопоставление: административные методы управления — волевые, экономические — научные. Такое противопоставление неправомерно, так как и административные методы могут (и должны быть) научными, и экономические, как ни странно, порой бывают волевыми. Можно, например, установить такие налоги и нормативы, что инициатива хозяйственных звеньев, самостоятельных фирм и корпораций будет не менее связана, чем при чисто административном управлении. См. также: Алгоритм управления, Возмущение, Гомеостаз, Иерархическая структура, Исполнительная система, Метауправление, Наука об управлении, Объект управления, Оптимальное управление, Программно-целевые методы планирования и управления, Процесс управления, Следящее управление, Субъект управления, Управляющие параметры в экономике. Рис. У.1 Управление кибернетической системой I — программное управление, II — регулирование, III — саморегулирование; БУ — блок управления, ОУ — объект управления; штриховка — условное обозначение внешней среды.
[ http://slovar-lopatnikov.ru/]Тематики
EN
Русско-английский словарь нормативно-технической терминологии > управление экономической системой (кибернетический аспект)
-
111 дистанционное техническое обслуживание
дистанционное техническое обслуживание
Техническое обслуживание объекта, проводимое под управлением персонала без его непосредственного присутствия.
[ОСТ 45.152-99 ]Параллельные тексты EN-RU из ABB Review. Перевод компании Интент
Service from afarДистанционный сервисABB’s Remote Service concept is revolutionizing the robotics industryРазработанная АББ концепция дистанционного обслуживания Remote Service революционизирует робототехникуABB robots are found in industrial applications everywhere – lifting, packing, grinding and welding, to name a few. Robust and tireless, they work around the clock and are critical to a company’s productivity. Thus, keeping these robots in top shape is essential – any failure can lead to serious output consequences. But what happens when a robot malfunctions?Роботы АББ используются во всех отраслях промышленности для перемещения грузов, упаковки, шлифовки, сварки – всего и не перечислить. Надежные и неутомимые работники, способные трудиться день и ночь, они представляют большую ценность для владельца. Поэтому очень важно поддерживать их в надлежащей состоянии, ведь любой отказ может иметь серьезные последствия. Но что делать, если робот все-таки сломался?ABB’s new Remote Service concept holds the answer: This approach enables a malfunctioning robot to alarm for help itself. An ABB service engineer then receives whole diagnostic information via wireless technology, analyzes the data on a Web site and responds with support in just minutes. This unique service is paying off for customers and ABB alike, and in the process is revolutionizing service thinking.Ответом на этот вопрос стала новая концепция Remote Service от АББ, согласно которой неисправный робот сам просит о помощи. C помощью беспроводной технологии специалист сервисной службы АББ получает всю необходимую диагностическую информацию, анализирует данные на web-сайте и через считанные минуты выдает рекомендации по устранению отказа. Эта уникальная возможность одинаково ценна как для заказчиков, так и для самой компании АББ. В перспективе она способна в корне изменить весь подход к организации технического обслуживания.Every minute of production downtime can have financially disastrous consequences for a company. Traditional reactive service is no longer sufficient since on-site service engineer visits also demand great amounts of time and money. Thus, companies not only require faster help from the service organization when needed but they also want to avoid disturbances in production.Каждая минута простоя производства может привести к губительным финансовым последствиям. Традиционная организация сервиса, предусматривающая ликвидацию возникающих неисправностей, становится все менее эффективной, поскольку вызов сервисного инженера на место эксплуатации робота сопряжен с большими затратами времени и денег. Предприятия требуют от сервисной организации не только более быстрого оказания помощи, но и предотвращения возможных сбоев производства.In 2006, ABB developed a new approach to better meet customer’s expectations: Using the latest technologies to reach the robots at customer sites around the world, ABB could support them remotely in just minutes, thereby reducing the need for site visits. Thus the new Remote Service concept was quickly brought to fruition and was launched in mid-2007. Statistics show that by using the system the majority of production stoppages can be avoided.В 2006 г. компания АББ разработала новый подход к удовлетворению ожиданий своих заказчиков. Использование современных технологий позволяет специалистам АББ получать информацию от роботов из любой точки мира и в считанные минуты оказывать помощь дистанционно, в результате чего сокращается количество выездов на место установки. Запущенная в середине 2007 г. концепция Remote Service быстро себя оправдала. Статистика показывает, что её применение позволило предотвратить большое число остановок производства.Reactive maintenance The hardware that makes ABB Remote Service possible consists of a communication unit, which has a function similar to that of an airplane’s so-called black box 1. This “service box” is connected to the robot’s control system and can read and transmit diagnostic information. The unit not only reads critical diagnostic information that enables immediate support in the event of a failure, but also makes it possible to monitor and analyze the robot’s condition, thereby proactively detecting the need for maintenance.Устранение возникающих неисправностей Аппаратное устройство, с помощью которого реализуется концепция Remote Service, представляет собой коммуникационный блок, работающий аналогично черному ящику самолета (рис. 1). Этот блок считывает диагностические данные из контроллера робота и передает их по каналу GSM. Считывается не только информация, необходимая для оказания немедленной помощи в случае отказа, но и сведения, позволяющие контролировать и анализировать состояние робота для прогнозирования неисправностей и планирования технического обслуживания.If the robot breaks down, the service box immediately stores the status of the robot, its historical data (as log files), and diagnostic parameters such as temperature and power supply. Equipped with a built-in modem and using the GSM network, the box transmits the data to a central server for analysis and presentation on a dedicated Web site. Alerts are automatically sent to the nearest of ABB’s 1,200 robot service engineers who then accesses the detailed data and error log to analyze the problem.При поломке робота сервисный блок немедленно сохраняет данные о его состоянии, сведения из рабочего журнала, а также значения диагностических параметров (температура и характеристики питания). Эти данные передаются встроенным GSM-модемом на центральный сервер для анализа и представления на соответствующем web-сайте. Аварийные сообщения автоматически пересылаются ближайшему к месту аварии одному из 1200 сервисных инженеров-робототехников АББ, который получает доступ к детальной информации и журналу аварий для анализа возникшей проблемы.A remotely based ABB engineer can then quickly identify the exact fault, offering rapid customer support. For problems that cannot be solved remotely, the service engineer can arrange for quick delivery of spare parts and visit the site to repair the robot. Even if the engineer must make a site visit, service is faster, more efficient and performed to a higher standard than otherwise possible.Специалист АББ может дистанционно идентифицировать отказ и оказать быструю помощь заказчику. Если неисправность не может быть устранена дистанционно, сервисный инженер организовывает доставку запасных частей и выезд ремонтной бригады. Даже если необходимо разрешение проблемы на месте, предшествующая дистанционная диагностика позволяет минимизировать объем работ и сократить время простоя.Remote Service enables engineers to “talk” to robots remotely and to utilize tools that enable smart, fast and automatic analysis. The system is based on a machine-to-machine (M2M) concept, which works automatically, requiring human input only for analysis and personalized customer recommendations. ABB was recognized for this innovative solution at the M2M United Conference in Chicago in 2008 Factbox.Remote Service позволяет инженерам «разговаривать» с роботами на расстоянии и предоставляет в их распоряжение интеллектуальные средства быстрого автоматизированного анализа. Система основана на основе технологии автоматической связи машины с машиной (M2M), где участие человека сводится к анализу данных и выдаче рекомендаций клиенту. В 2008 г. это инновационное решение от АББ получило приз на конференции M2M United Conference в Чикаго (см. вставку).Proactive maintenanceRemote Service also allows ABB engineers to monitor and detect potential problems in the robot system and opens up new possibilities for proactive maintenance.Прогнозирование неисправностейRemote Service позволяет инженерам АББ дистанционно контролировать состояние роботов и прогнозировать возможные неисправности, что открывает новые возможности по организации профилактического обслуживания.The service box regularly takes condition measurements. By monitoring key parameters over time, Remote Service can identify potential failures and when necessary notify both the end customer and the appropriate ABB engineer. The management and storage of full system backups is a very powerful service to help recover from critical situations caused, for example, by operator errors.Сервисный блок регулярно выполняет диагностические измерения. Непрерывно контролируя ключевые параметры, Remote Service может распознать потенциальные опасности и, при необходимости, оповещать владельца оборудования и соответствующего специалиста АББ. Резервирование данных для возможного отката является мощным средством, обеспечивающим восстановление системы в критических ситуациях, например, после ошибки оператора.The first Remote Service installation took place in the automotive industry in the United States and quickly proved its value. The motherboard in a robot cabinet overheated and the rise in temperature triggered an alarm via Remote Service. Because of the alarm, engineers were able to replace a faulty fan, preventing a costly production shutdown.Первая система Remote Service была установлена на автозаводе в США и очень скоро была оценена по достоинству. Она обнаружила перегрев материнской платы в шкафу управления роботом и передала сигнал о превышении допустимой температуры, благодаря чему инженеры смогли заменить неисправный вентилятор и предотвратить дорогостоящую остановку производства.MyRobot: 24-hour remote access
Having regular access to a robot’s condition data is also essential to achieving lean production. At any time, from any location, customers can verify their robots’ status and access maintenance information and performance reports simply by logging in to ABB’s MyRobot Web site. The service enables customers to easily compare performances, identify bottlenecks or developing issues, and initiate the mostСайт MyRobot: круглосуточный дистанционный доступДля того чтобы обеспечить бесперебойное производство, необходимо иметь регулярный доступ к информации о состоянии робота. Зайдя на соответствующую страницу сайта MyRobot компании АББ, заказчики получат все необходимые данные, включая сведения о техническом обслуживании и отчеты о производительности своего робота. Эта услуга позволяет легко сравнивать данные о производительности, обнаруживать возможные проблемы, а также оптимизировать планирование технического обслуживания и модернизации. С помощью MyRobot можно значительно увеличить выпуск продукции и уменьшить количество выбросов.Award-winning solutionIn June 2008, the innovative Remote Service solution won the Gold Value Chain award at the M2M United Conference in Chicago. The value chain award honors successful corporate adopters of M2M (machine–to-machine) technology and highlights the process of combining multiple technologies to deliver high-quality services to customers. ABB won in the categoryof Smart Services.Приз за удачное решениеВ июне 2008 г. инновационное решение Remote Service получило награду Gold Value Chain (Золотая цепь) на конференции M2M United Conference в Чикаго. «Золотая цепь» присуждается за успешное масштабное внедрение технологии M2M (машина – машина), а также за достижения в объединении различных технологий для предоставления высококачественных услуг заказчикам. АББ одержала победу в номинации «Интеллектуальный сервис».Case study: Tetley Tetley GB Ltd is the world’s second-largest manufacturer and distributor of tea. The company’s manufacturing and distribution business is spread across 40 countries and sells over 60 branded tea bags. Tetley’s UK tea production facility in Eaglescliffe, County Durham is the sole producer of Tetley tea bags 2.Пример применения: Tetley Компания TetleyGB Ltd является вторым по величине мировым производителем и поставщиком чая. Производственные и торговые филиалы компании имеются в 40 странах, а продукция распространяется под 60 торговыми марками. Чаеразвесочная фабрика в Иглсклифф, графство Дарем, Великобритания – единственный производитель чая Tetley в пакетиках (рис. 2).ABB offers a flexible choice of service agreements for both new and existing robot installations, which can help extend the mean time between failures, shorten the time to repair and lower the cost of automated production.Предлагаемые АББ контракты на выполнение технического обслуживания как уже имеющихся, так и вновь устанавливаемых роботов, позволяют значительно увеличить среднюю наработку на отказ, сократить время ремонта и общую стоимость автоматизированного производства.Robots in the plant’s production line were tripping alarms and delaying the whole production cycle. The spurious alarms resulted in much unnecessary downtime that was spent resetting the robots in the hope that another breakdown could be avoided. Each time an alarm was tripped, several hours of production time was lost. “It was for this reason that we were keen to try out ABB’s Remote Service agreement,” said Colin Trevor, plant maintenance manager.Установленные в технологической линии роботы выдавали аварийные сигналы, задерживающие выполнение производственного цикла. Ложные срабатывания вынуждали перезапускать роботов в надежде предотвратить возможные отказы, в результате чего после каждого аварийного сигнала производство останавливалось на несколько часов. «Именно поэтому мы решили попробовать заключить с АББ контракт на дистанционное техническое обслуживание», – сказал Колин Тревор, начальник технической службы фабрики.To prevent future disruptions caused by unplanned downtime, Tetley signed an ABB Response Package service agreement, which included installing a service box and system infrastructure into the robot control systems. Using the Remote Service solution, ABB remotely monitors and collects data on the “wear and tear” and productivity of the robotic cells; this data is then shared with the customer and contributes to smooth-running production cycles.Для предотвращения ущерба в результате незапланированных простоев Tetley заключила с АББ контракт на комплексное обслуживание Response Package, согласно которому системы управления роботами были дооборудованы сервисными блоками с необходимой инфраструктурой. С помощью Remote Service компания АББ дистанционно собирает данные о наработке, износе и производительности роботизированных модулей. Эти данные предоставляются заказчику для оптимизации загрузки производственного оборудования.Higher production uptimeSince the implementation of Remote Service, Tetley has enjoyed greatly reduced robot downtime, with no further disruptions caused by unforeseen problems. “The Remote Service package has dramatically changed the plant,” said Trevor. “We no longer have breakdown issues throughout the shift, helping us to achieve much longer periods of robot uptime. As we have learned, world-class manufacturing facilities need world-class support packages. Remote monitoring of our robots helps us to maintain machine uptime, prevent costly downtime and ensures my employees can be put to more valuable use.”Увеличение полезного времениС момента внедрения Remote Service компания Tetley была приятно удивлена резким сокращением простоя роботов и отсутствием незапланированных остановок производства. «Пакет Remote Service резко изменил ситуацию на предприятии», – сказал Тревор. «Мы избавились от простоев роботов и смогли резко увеличить их эксплуатационную готовность. Мы поняли, что для производственного оборудования мирового класса необходим сервисный пакет мирового класса. Дистанционный контроль роботов помогает нам поддерживать их в рабочем состоянии, предотвращать дорогостоящие простои и задействовать наш персонал для выполнения более важных задач».Service accessRemote Service is available worldwide, connecting more than 500 robots. Companies that have up to 30 robots are often good candidates for the Remote Service offering, as they usually have neither the engineers nor the requisite skills to deal with robotics faults themselves. Larger companies are also enthusiastic about Remote Service, as the proactive services will improve the lifetime of their equipment and increase overall production uptime.Доступность сервисаСеть Remote Service охватывает более 700 роботов по всему миру. Потенциальными заказчиками Remote Service являются компании, имеющие до 30 роботов, но не имеющие инженеров и техников, способных самостоятельно устранять их неисправности. Интерес к Remote Service проявляют и более крупные компании, поскольку они заинтересованы в увеличении срока службы и эксплуатационной готовности производственного оборудования.In today’s competitive environment, business profitability often relies on demanding production schedules that do not always leave time for exhaustive or repeated equipment health checks. ABB’s Remote Service agreements are designed to monitor its customers’ robots to identify when problems are likely to occur and ensure that help is dispatched before the problem can escalate. In over 60 percent of ABB’s service calls, its robots can be brought back online remotely, without further intervention.В условиях современной конкуренции окупаемость бизнеса часто зависит от соблюдения жестких графиков производства, не оставляющих времени для полномасштабных или периодических проверок исправности оборудования. Контракт Remote Service предусматривает мониторинг состояния роботов заказчика для прогнозирования возможных неисправностей и принятие мер по их предотвращению. В более чем 60 % случаев для устранения неисправности достаточно дистанционной консультации в сервисной службе АББ, дальнейшего вмешательства не требуется.ABB offers a flexible choice of service agreements for both new and existing robot installations, which helps extend the mean time between failures, shorten the time to repair and lower the total cost of ownership. With four new packages available – Support, Response, Maintenance and Warranty, each backed up by ABB’s Remote Service technology – businesses can minimize the impact of unplanned downtime and achieve improved production-line efficiency.Компания АББ предлагает гибкий выбор контрактов на выполнение технического обслуживания как уже имеющихся, так и вновь устанавливаемых роботов, которые позволяют значительно увеличить среднюю наработку на отказ, сократить время ремонта и эксплуатационные расходы. Четыре новых пакета на основе технологии Remote Service – Support, Response, Maintenance и Warranty – позволяют минимизировать внеплановые простои и значительно повысить эффективность производства.The benefits of Remote Sevice are clear: improved availability, fewer service visits, lower maintenance costs and maximized total cost of ownership. This unique service sets ABB apart from its competitors and is the beginning of a revolution in service thinking. It provides ABB with a great opportunity to improve customer access to its expertise and develop more advanced services worldwide.Преимущества дистанционного технического обслуживания очевидны: повышенная надежность, уменьшение выездов ремонтных бригад, уменьшение затрат на обслуживание и общих эксплуатационных расходов. Эта уникальная услуга дает компании АББ преимущества над конкурентами и демонстрирует революционный подход к организации сервиса. Благодаря ей компания АББ расширяет доступ заказчиков к опыту своих специалистов и получает возможность более эффективного оказания технической помощи по всему миру.Тематики
- тех. обсл. и ремонт средств электросвязи
Обобщающие термины
EN
Русско-английский словарь нормативно-технической терминологии > дистанционное техническое обслуживание
112 программируемый логический контроллер
- speicherprogrammierbare Steuerung, f
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего. Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы. Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7. Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series. Рис. 4. Резервированный контроллер FCP270.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA). Рис. 5. Контроллер AC800M.
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-немецкий словарь нормативно-технической терминологии > программируемый логический контроллер
113 программируемый логический контроллер
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-английский словарь нормативно-технической терминологии > программируемый логический контроллер
114 программируемый логический контроллер
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-французский словарь нормативно-технической терминологии > программируемый логический контроллер
115 схема
diagram
(графическое изображение соединений и функциональных зависимостей в системе)
- (система) — system
- (электрическая или эпектронная сеть) — circuitry
- аварийного покидания самолета в воздухе (пути покидания ла) — bailout escape routes
- аварийного покидания ла на земле (пути покидания ла) — evacuation routes
-, аэродинамическая — aerodynamic configuration
- взлета (рис. 112) — takeoff pattern
- в трех проекциях (рис. 130) — three-view outline drawing
- газовоздушного тракта двигателя (рис. 47) — engine gas flow
-, двухтактная (усилителя) — push-pull circuit
а push-pull three-stage amplifier.
- действия — functional diagram
- деления самолета на зоны — zoning diagram
- деления самолета на зоны с указанием эксплуатационных лючков — aircraft zoning diagram and асcess door and panel identification
- дистанций (рис. 131) — station diagram
- захода на посадку (рис. 115) — landing /approach/ pattern
- "и" (в вычислительном устройстве) — and circuit, and gate (circuit)
in an electronic computer, a gate circuit with more than one control (input) terminal.
-, интегральная — integrated circuit
цепь собрана на интегральных схемах. — а system uses /based on use of/ integrated circuits.
-, кинематическая — functional diagram
-, кинематическая (заголовок раздела руководства) — mechanical description
- локализация отказов — fault isolation diagram
-, мнемоническая (топливной системы) — (fuel system) mnemonic diagram
-, монолитная (эл.) — solid-state circuitry
all solid-state circuitry is used in many key chassis areas.
-, монтажная (эл.) — wiring diagram
электромонтажная схема, показывающая расположение и содержащая обозначения элементов и соединительных проводников блока или цепи. — the wiring diagram shall be an installation drawing showing and identifying the units and conductors that make up the installation.
- нагружения (элементов системы управления рулем высоты) — (elevator control system) loading conditions
- обратной связи — feedback circuit
- организации технологического процесса ремонта (карта) — overhaul flow (chart)
- основных технологических разъемов — production breakdown diagram
- отыскания и устранения неисправностей — trouble shooting chart
-, печатная (плата) — printed circuit (board)
- поиска неисправностей (карта) — trouble shooting card
- (маршрут) полета в зоне ожидания (на малой высоте) — (low altitude) holding pattern. the economical engines permit the aircraft to fly in the low altitude holding pattern.
- (маршрут) полета в зоне ожидания на экономическом режиме. — economic holding pattern. reduced fuel consumption is obtained by flying in economic holding pattern.
- (профиль) полета — flight profile
-, полумонтажная (в афс) — wiring diagram
- последовательности работы (агрегатов) — sequence-of-operation diagram
- приводов агрегатов, кинематическая — accessory drives gear train (diagram)
-, принципиальная (графическое изображение) — schematic diagram
схема наглядно иллюстрирует взаимодействие элементов сложных систем (цепей) и облегчает отыскание и устранение неисправностей в этих системах. элементы изображаются условными графическими обозначениями. — the schematic diagram facilifates tracing and trouble shooting complex circuits. it shows by means of graphic symbols all the components required to perform system operation.
-, принципиальная электрическая (заголовок раздела ру ководства) — electrical description
-, принципиальная упрощенная — simplified schematic diagram
- проверки, поверочная (схема соединений поверочного оборудования) — test set up /setup/ (diagram)
- работы (графическое изображение) — functional diagram
- работы (принцип действия, заголовок раздела) — operation
- разворота (самолета на земле) — turning circle
- размещения и швартовки грузов (в грузовой кабине) — cargo arrangement and lashing /tie-down/ diagram
- расположения агрегатов — arrangement diagram
- ремонта, технологическая (карта) — overhaul flow chart
- соединений — connection diagram
- соединений (полумонтажная в афс) — wiring diagram
- соединений поверочной установки (подрисуночная надпись бпок-схемы) — test equipment setup (diagram)
-, структурная (блок-схема) — block diagram
- технологических разъемов (изображение в расчлененном виде) (рис. 1) — exploded view drawing (showing major components of airplane)
- технологичесмих разъемов (групп) самолета — aircraft major components exploded view (diagram)
- технологического процесса ремонта (изделия) — overhaul procedures. overhaul procedures include cleaning, disassembly, etc.
- трубопроводов — piping diagram
·-, упрощенная — simplified diagram
-, упрощенная принципиальная — simplified schematic diagram
- установки (агрегата) — installation diagram
- "утка" (о самолете) — canard configuration
- фазовой автоподстройки частоты (фапч) — phase-locked loop (pll)
-, фидерная (эл.) — wiring diagram
-, функциональная (блок-схема) — block diagram
-, цветовая — color scheme
цветовая схема салона выполнена в зеленоватых и кремовых тонах. — color scheme of the passenger cabin is of green and cream.
-, центровочная (заголовок) (рис. 132) — (airplane) center of gravity (cg) limits
- членения (самолета или агрегата) (рис. 1) — exploded view drawing
- шасси — landing gear configuration
- шасси, трехопорная (с передней опорой) — tricycle landing gear
- шасси, трехопорная (с хвостовым колесом) — tail wheel(-type) landing gear
- швартовки грузов (в грузовой кабине) — cargo lashing /tie-down/ diagram
- швартовки техники (колесной и гусеничной) (в грузовой кабине) — vehicle lashing /tie-down/ diagram
- шпангоутов (дистанций) фюзеляжа (для определения координат цт) — station diagram
-, электрическая (графическое изображение) — electrical diagram
-, электрическая (заголовок раздела руководства) — electrical description
-, электрическая (система) — electrical system
-, электрическая (совокупность электрических цепей) — (electrical) circuitry
-, электромонтажная — wiring diagram
альбом фидерных с. — wiring diagram manual
блок-с. — block diagram
порядок сборки поверочной с. — test set-up procedure
быть выполненным (реализованным, собранным) по с. — be built on /around/ (circuit), be based on /using, employing/ circuit
the rectifier is built on a bridge circuit.
доработка с. (эл. цепей) — circuit modification
доработка с. (внесение изменений в эл. схемы в руководстве, инструкции) — revision to (wiring) diagram
собирать по с. — build (smth) on /around/ as...
connect amplifier as a differential circuit.
собирать схему проверки — connect equipment in setupРусско-английский сборник авиационно-технических терминов > схема
116 человеко-машинный интерфейс
- operator-machine communication
- MMI
- man-machine interface
- man-machine communication
- human-machine interface
- human-computer interface
- human interface device
- human interface
- HMI
- computer human interface
- CHI
человеко-машинный интерфейс (ЧМИ)
Технические средства, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование.
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства, дисплеи.
[ ГОСТ Р МЭК 60447-2000]
человекомашинный интерфейс (ЧМИ)
Технические средства контроля и управления, являющиеся частью оборудования, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование (ГОСТ Р МЭК 60447).
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства и дисплеи.
[ ГОСТ Р МЭК 60073-2000]
человеко-машинный интерфейс
Средства обеспечения двусторонней связи "оператор - технологическое оборудование" (АСУ ТП). Название класса средств, в который входят подклассы:
SCADA (Supervisory Control and Data Acquisition) - Операторское управление и сбор данных от технологического оборудования.
DCS (Distributed Control Systems) - Распределенная система управления технологическим оборудованием.
[ http://www.morepc.ru/dict/]Параллельные тексты EN-RU
MotorSys™ iPMCC solutions can integrate a dedicated human-machine interface (HMI) or communicate via a personal computer directly on the motor starters.
[Schneider Electric]Интеллектуальный центр распределения электроэнергии и управления электродвигателями MotorSys™ может иметь в своем составе специальный человеко-машинный интерфейс (ЧМИ). В качестве альтернативы используется обмен данным между персональным компьютером и пускателями.
[Перевод Интент]
HMI на базе операторских станций
Самое, пожалуй, главное в системе управления - это организация взаимодействия между человеком и программно-аппаратным комплексом. Обеспечение такого взаимодействия и есть задача человеко-машинного интерфейса (HMI, human machine interface).
На мой взгляд, в аббревиатуре “АСУ ТП” ключевым является слово “автоматизированная”, что подразумевает непосредственное участие человека в процессе реализации системой определенных задач. Очевидно, что чем лучше организован HMI, тем эффективнее человек сможет решать поставленные задачи.
Как же организован HMI в современных АСУ ТП?
Существует, как минимум, два подхода реализации функционала HMI:- На базе специализированных рабочих станций оператора, устанавливаемых в центральной диспетчерской;
- На базе панелей локального управления, устанавливаемых непосредственно в цеху по близости с контролируемым технологическим объектам.
Иногда эти два варианта комбинируют, чтобы достичь наибольшей гибкости управления. В данной статье речь пойдет о первом варианте организации операторского уровня.
Аппаратно рабочая станция оператора (OS, operator station) представляет собой ни что иное как персональный компьютер. Как правило, станция снабжается несколькими широкоэкранными мониторами, функциональной клавиатурой и необходимыми сетевыми адаптерами для подключения к сетям верхнего уровня (например, на базе Industrial Ethernet). Станция оператора несколько отличается от привычных для нас офисных компьютеров, прежде всего, своим исполнением и эксплуатационными характеристиками (а также ценой 4000 - 10 000 долларов).
На рисунке 1 изображена рабочая станция оператора системы SIMATIC PCS7 производства Siemens, обладающая следующими техническими характеристиками:
Процессор: Intel Pentium 4, 3.4 ГГц;
Память: DDR2 SDRAM до 4 ГБ;
Материнская плата: ChipSet Intel 945G;
Жесткий диск: SATA-RAID 1/2 x 120 ГБ;
Слоты: 4 x PCI, 2 x PCI E x 1, 1 x PCI E x 16;
Степень защиты: IP 31;
Температура при эксплуатации: 5 – 45 C;
Влажность: 5 – 95 % (без образования конденсата);
Операционная система: Windows XP Professional/2003 Server.
Рис. 1. Пример промышленной рабочей станции оператора.Системный блок может быть как настольного исполнения ( desktop), так и для монтажа в 19” стойку ( rack-mounted). Чаще применяется второй вариант: системный блок монтируется в запираемую стойку для лучшей защищенности и предотвращения несанкционированного доступа.
Какое программное обеспечение используется?
На станции оператора устанавливается программный пакет визуализации технологического процесса (часто называемый SCADA). Большинство пакетов визуализации работают под управлением операционных систем семейства Windows (Windows NT 4.0, Windows 2000/XP, Windows 2003 Server), что, на мой взгляд, является большим минусом.
Программное обеспечение визуализации призвано выполнять следующие задачи:- Отображение технологической информации в удобной для человека графической форме (как правило, в виде интерактивных мнемосхем) – Process Visualization;
- Отображение аварийных сигнализаций технологического процесса – Alarm Visualization;
- Архивирование технологических данных (сбор истории процесса) – Historical Archiving;
- Предоставление оператору возможности манипулировать (управлять) объектами управления – Operator Control.
- Контроль доступа и протоколирование действий оператора – Access Control and Operator’s Actions Archiving.
- Автоматизированное составление отчетов за произвольный интервал времени (посменные отчеты, еженедельные, ежемесячные и т.д.) – Automated Reporting.
Как правило, SCADA состоит из двух частей:
- Среды разработки, где инженер рисует и программирует технологические мнемосхемы;
- Среды исполнения, необходимой для выполнения сконфигурированных мнемосхем в режиме runtime. Фактически это режим повседневной эксплуатации.
Существует две схемы подключения операторских станций к системе управления, а точнее уровню управления. В рамках первой схемы каждая операторская станция подключается к контроллерам уровня управления напрямую или с помощью промежуточного коммутатора (см. рисунок 2). Подключенная таким образом операторская станция работает независимо от других станций сети, и поэтому часто называется одиночной (пусть Вас не смущает такое название, на самом деле таких станций в сети может быть несколько).

Рис. 2. Схема подключения одиночных операторских станций к уровню управления.Есть и другой вариант. Часто операторские станции подключают к серверу или резервированной паре серверов, а серверы в свою очередь подключаются к промышленным контроллерам. Таким образом, сервер, являясь неким буфером, постоянно считывает данные с контроллера и предоставляет их по запросу рабочим станциям. Станции, подключенные по такой схеме, часто называют клиентами (см. рисунок 3).
Как происходит информационный обмен?
Рис. 3. Клиент-серверная архитектура операторского уровня.
Для сопряжения операторской станции с промышленным контроллером на первой устанавливается специальное ПО, называемое драйвером ввода/вывода. Драйвер ввода/вывода поддерживает совместимый с контроллером коммуникационный протокол и позволяет прикладным программам считывать с контроллера параметры или наоборот записывать в него. Пакет визуализации обращается к драйверу ввода/вывода каждый раз, когда требуется обновление отображаемой информации или запись измененных оператором данных. Для взаимодействия пакета визуализации и драйвера ввода/вывода используется несколько протоколов, наиболее популярные из которых OPC (OLE for Process Control) и NetDDE (Network Dynamic Data Exchange). Обобщенно можно сказать, что OPC и NetDDE – это протоколы информационного обмена между различными приложениями, которые могут выполняться как на одном, так и на разных компьютерах. На рисунках 4 и 5 изображено, как взаимодействуют программные компоненты при различных схемах построения операторского уровня.
Рис. 4. Схема взаимодействия программных модулей при использовании одиночных станций.
Рис. 5. Схема взаимодействия программных модулей при использовании клиент-серверной архитектуры.
Как выглядит SCADA?
Разберем простой пример. На рисунке 6 приведена абстрактная схема технологического процесса, хотя полноценным процессом это назвать трудно. Рис. 6. Пример операторской мнемосхемы.
Рис. 6. Пример операторской мнемосхемы.
На рисунке 6 изображен очень упрощенный вариант операторской мнемосхемы для управления тех. процессом. Как видно, резервуар (емкость) наполняется водой. Задача системы - нагреть эту воду до определенной температуры. Для нагрева воды используется газовая горелка. Интенсивность горения регулируется клапаном подачи газа. Также должен быть насос для закачки воды в резервуар и клапан для спуска воды.
На мнемосхеме отображаются основные технологические параметры, такие как: температура воды; уровень воды в резервуаре; работа насосов; состояние клапанов и т.д. Эти данные обновляются на экране с заданной частотой. Если какой-либо параметр достигает аварийного значения, соответствующее поле начинает мигать, привлекая внимание оператора.
Сигналы ввода/вывода и исполнительные механизмы отображаются на мнемосхемах в виде интерактивных графических символов (иконок). Каждому типу сигналов и исполнительных механизмов присваивается свой символ: для дискретного сигнала это может быть переключатель, кнопка или лампочка; для аналогового – ползунок, диаграмма или текстовое поле; для двигателей и насосов – более сложные фейсплейты ( faceplates). Каждый символ, как правило, представляет собой отдельный ActiveX компонент. Вообще технология ActiveX широко используется в SCADA-пакетах, так как позволяет разработчику подгружать дополнительные символы, не входящие в стандартную библиотеку, а также разрабатывать свои собственные графические элементы, используя высокоуровневые языки программирования.
Допустим, оператор хочет включить насос. Для этого он щелкает по его иконке и вызывает панель управления ( faceplate). На этой панели он может выполнить определенные манипуляции: включить или выключить насос, подтвердить аварийную сигнализацию, перевести его в режим “техобслуживания” и т.д. (см. рисунок 7). Рис. 7. Пример фейсплейта для управления насосом.Оператор также может посмотреть график изменения интересующего его технологического параметра, например, за прошедшую неделю. Для этого ему надо вызвать тренд ( trend) и выбрать соответствующий параметр для отображения. Пример тренда реального времени показан на рисунке 8.
Рис. 7. Пример фейсплейта для управления насосом.Оператор также может посмотреть график изменения интересующего его технологического параметра, например, за прошедшую неделю. Для этого ему надо вызвать тренд ( trend) и выбрать соответствующий параметр для отображения. Пример тренда реального времени показан на рисунке 8.
 Рис. 8. Пример отображения двух параметров на тренде реального времени.
Рис. 8. Пример отображения двух параметров на тренде реального времени.
Для более детального обзора сообщений и аварийных сигнализаций оператор может воспользоваться специальной панелью ( alarm panel), пример которой изображен на рисунке 9. Это отсортированный список сигнализаций (alarms), представленный в удобной для восприятия форме. Оператор может подтвердить ту или иную аварийную сигнализацию, применить фильтр или просто ее скрыть. Рис. 9. Панель сообщений и аварийных сигнализаций.
Рис. 9. Панель сообщений и аварийных сигнализаций.
Говоря о SCADA, инженеры часто оперируют таким важным понятием как “тэг” ( tag). Тэг является по существу некой переменной программы визуализации и может быть использован как для локального хранения данных внутри программы, так и в качестве ссылки на внешний параметр процесса. Тэги могут быть разных типов, начиная от обычных числовых данных и кончая структурой с множеством полей. Например, один визуализируемый параметр ввода/вывода – это тэг, или функциональный блок PID-регулятора, выполняемый внутри контроллера, - это тоже тэг. Ниже представлена сильно упрощенная структура тэга, соответствующего простому PID-регулятору:
Tag Name = “MyPID”;
Tag Type = PID;
Fields (список параметров):
MyPID.OP
MyPID.SP
MyPID.PV
MyPID.PR
MyPID.TI
MyPID.DI
MyPID.Mode
MyPID.RemoteSP
MyPID.Alarms и т.д.
В комплексной прикладной программе может быть несколько тысяч тэгов. Производители SCADA-пакетов это знают и поэтому применяют политику лицензирования на основе количества используемых тэгов. Каждая купленная лицензия жестко ограничивает суммарное количество тэгов, которые можно использовать в программе. Очевидно, чем больше тегов поддерживает лицензия, тем дороже она стоит; так, например, лицензия на 60 000 тэгов может обойтись в 5000 тыс. долларов или даже дороже. В дополнение к этому многие производители SCADA формируют весьма существенную разницу в цене между “голой” средой исполнения и полноценной средой разработки; естественно, последняя с таким же количеством тэгов будет стоить заметно дороже.
Сегодня на рынке представлено большое количество различных SCADA-пакетов, наиболее популярные из которых представлены ниже:
1. Wonderware Intouch;
2. Simatic WinCC;
3. Iconics Genesis32;
4. Citect;
5. Adastra Trace Mode
Лидирующие позиции занимают Wonderware Intouch (производства Invensys) и Simatic WinCC (разработки Siemens) с суммарным количеством инсталляций более 80 тыс. в мире. Пакет визуализации технологического процесса может поставляться как в составе комплексной системы управления, так и в виде отдельного программного продукта. В последнем случае SCADA комплектуется набором драйверов ввода/вывода для коммуникации с контроллерами различных производителей. [ http://kazanets.narod.ru/HMI_PART1.htm]Тематики
- автоматизация, основные понятия
- автоматизированные системы
Синонимы
EN
Русско-английский словарь нормативно-технической терминологии > человеко-машинный интерфейс
117 устройство с батарейным питанием
Русско-английский словарь по информационным технологиям > устройство с батарейным питанием
118 автоматический
автоматическая аэродромная радиолокационная системаautomated radar terminal systemавтоматическая балансировкаself-balanceавтоматическая бортовая система управленияautomatic flight control systemавтоматическая информация в районе аэродромаautomatic terminal informationавтоматическая коррекция ошибокautomatic error correctionавтоматическая метеостанцияautomatic weather stationавтоматическая настройкаself-aligningавтоматическая обработка данныхautomatic data processingавтоматическая посадка1. automatic landing2. autoland автоматическая прокладка маршрутаself-routingавтоматическая регулировка усиленияautomatic gain controlавтоматическая система объявления тревогиautoalarm systemавтоматическая смазкаself-oilingавтоматическая установка закрылковautomatic flap positioningавтоматический вводautomatic inputавтоматический заход на посадку1. automatic approach2. autoapproach автоматический контрольself-testавтоматический контроль траекторииautomatic path controlавтоматический курсографautomatic plotterавтоматический пеленгаторautomatic direction finderавтоматический полет1. automatic flight2. computer-directed flight автоматический регулятор температуры выходящих газовautomatic exhaust temperature controlавтоматическое бронирование местautomatic seat reservationавтоматическое выравнивание воздушного судна перед посадкойautoflareавтоматическое измерение дальностиautomatic range measurementавтоматическое измерение угла превышенияautomatic elevation measurementавтоматическое парирование сносаautomatic decrabавтоматическое радиопеленгационное оборудованиеautomatic direction-finding equipmentавтоматическое реверсированиеforced reversingавтоматическое регулирование громкостиautomatic volume controlавтоматическое регулирование заправкиself-primingавтоматическое регулирование наддуваautomatic boost controlавтоматическое сигнальное устройствоautomatic signalling deviceавтоматическое сопровождение по дальностиautomatic range trackingавтоматическое управлениеautomatic controlавтоматическое управление полетомautomatic flight controlавтоматическое управление уровнемautomatic level controlавтоматическое флюгирование1. automatic feathering2. autofeathering автоматическое флюгирование по отрицательной тягеdrag-actuated autofeatheringавтоматическое флюгирование по предельным оборотамoverspeed-actuated autofeatheringавтоматическое флюгирование при падении крутящего моментаpositive torque drop autofeatheringблок автоматического определения дальностиautomatic range unitвоздушный винт с автоматической регулировкойautomatically controllable propellerвычислитель параметров автоматического ухода на второй кругauto go around computerдальность автоматического сопровожденияautotracking rangeдублированная система автоматического управления посадкойdual autoland systemкомплексная автоматическая системаintegrated automatic systemоборудование автоматического управления полетомautomatic flight control equipmentоборудование автоматической передачи данныхautomatic data transfer equipmentоборудование автоматической стабилизацииautomatic stabilization equipmentпилотировать с помощью автоматического управленияfly automaticallyпосадка с автоматическим выравниваниемautoflare landingрежим автоматической посадкиautoland modeс автоматическим управлениемself-monitoringсигнал автоматического парирования сносаautomatic decrab signalсистема автоматического захода на посадкуautomatic approach systemсистема автоматического контроля1. automatic test system2. automatic monitor system система автоматического парирования кренаbank counteract system(при отказе одного из двигателей) система автоматического управленияrobot-control system(полетом) система автоматического управления параллельной работой генераторовgenerator autoparalleling systemсистема автоматической посадки1. autoland system2. automatic landing system система автоматической сигнализации углов атаки, скольжения и перегрузокangle-of-attack, slip and acceleration warning systemсистема автоматической стабилизацииautomatic stabilization system(воздушного судна) с системой автоматической смазки, автоматически смазывающийсяself-lubricationустройство автоматического сопровожденияautomatic range trackerфильтр с автоматической очисткой1. depolluting filter2. self-cleaning filter119 управление электропитанием
управление электропитанием
-
[Интент]
Управление электропитанием ЦОД
Автор: Жилкина Наталья
Опубликовано 23 апреля 2009 года
Источники бесперебойного питания, функционирующие в ЦОД, составляют важный элемент общей системы его энергообеспечения. Вписываясь в контур управления ЦОД, система мониторинга и управления ИБП становится ядром для реализации эксплуатационных функций.
Три задачи
Системы мониторинга, диагностики и управления питанием нагрузки решают три основные задачи: позволяют ИБП выполнять свои функции, оповещать персонал о происходящих с ними событиях и посылать команды для автоматического завершения работы защищаемого устройства.
Мониторинг параметров ИБП предполагает отображение и протоколирование состояния устройства и всех событий, связанных с его изменением. Диагностика реализуется функциями самотестирования системы. Управляющие же функции предполагают активное вмешательство в логику работы устройства.Многие специалисты этого рынка, отмечая важность процедуры мониторинга, считают, что управление должно быть сведено к минимуму. «Функция управления ИБП тоже нужна, но скорее факультативно, — говорит Сергей Ермаков, технический директор компании Inelt и эксперт в области систем Chloride. — Я глубоко убежден, что решения об активном управляющем вмешательстве в работу систем защиты электропитания ответственной нагрузки должен принимать человек, а не автоматизированная система. Завершение работы современных мощных серверов, на которых функционируют ответственные приложения, — это, как правило, весьма длительный процесс. ИБП зачастую не способны обеспечивать необходимое для него время, не говоря уж о времени запуска какого-то сервиса». Функция же мониторинга позволяет предотвратить наступление нежелательного события — либо, если таковое произошло, проанализировать его причины, опираясь не на слова, а на запротоколированные данные, хранящиеся в памяти адаптера или файлах на рабочей станции мониторинга.
Эту точку зрения поддерживает и Алексей Сарыгин, технический директор компании Radius Group: «Дистанционное управление мощных ИБП — это вопрос, к которому надо подходить чрезвычайно аккуратно. Если функции дистанционного мониторинга и диспетчеризации необходимы, то практика предоставления доступа персоналу к функциям дистанционного управления представляется радикально неверной. Доступность модулей управления извне потенциально несет в себе риск нарушения безопасности и категорически снижает надежность системы. Если существует физическая возможность дистанционно воздействовать на ИБП, на его параметры, отключение, снятие нагрузки, закрытие выходных тиристорных ключей или блокирование цепи байпаса, то это чревато потерей питания всего ЦОД».
Практически на всех трехфазных ИБП предусмотрена кнопка E.P.O. (Emergency Power Off), дублер которой может быть выведен на пульт управления диспетчерской. Она обеспечивает аварийное дистанционное отключение блоков ИБП при наступлении аварийных событий. Это, пожалуй, единственная возможность обесточить нагрузку, питаемую от трехфазного аппарата, но реализуется она в исключительных случаях.
Что же касается диагностики электропитания, то, как отмечает Юрий Копылов, технический директор московского офиса корпорации Eaton, в последнее время характерной тенденцией в управляющем программном обеспечении стал отказ от предоставления функций удаленного тестирования батарей даже системному администратору.
— Адекватно сравнивать состояние батарей необходимо под нагрузкой, — говорит он, — сам тест запускать не чаще чем раз в два дня, а разряжать батареи надо при одном и том же токе и уровне нагрузки. К тому же процесс заряда — довольно долгий. Все это не идет батареям на пользу.Средства мониторинга
Производители ИБП предоставляют, как правило, сразу несколько средств мониторинга и в некоторых случаях даже управления ИБП — все они основаны на трех основных методах.
В первом случае устройство подключается напрямую через интерфейс RS-232 (Com-порт) к консоли администратора. Дальность такого подключения не превышает 15 метров, но может быть увеличена с помощью конверторов RS-232/485 и RS-485/232 на концах провода, связывающего ИБП с консолью администратора. Такой способ обеспечивает низкую скорость обмена информацией и пригоден лишь для топологии «точка — точка».
Второй способ предполагает использование SNMP-адаптера — встроенной или внешней интерфейсной карты, позволяющей из любой точки локальной сети получить информацию об основных параметрах ИБП. В принципе, для доступа к ИБП через SNMP достаточно веб-браузера. Однако для большего комфорта производители оснащают свои системы более развитым графическим интерфейсом, обеспечивающим функции мониторинга и корректного завершения работы. На базе SNMP-протокола функционируют все основные системы мониторинга и управления ИБП, поставляемые штатно или опционально вместе с ИБП.
Стандартные SNMP-адаптеры поддерживают подключение нескольких аналоговых или пороговых устройств — датчик температуры, движения, открытия двери и проч. Интеграция таких устройств в общую систему мониторинга крупного объекта (например, дата-центра) позволяет охватить огромное количество точек наблюдения и отразить эту информацию на экране диспетчера.
Большое удобство предоставляет метод эксплуатационного удаленного контроля T.SERVICE, позволяющий отследить работу оборудования посредством телефонной линии (через модем GSM) или через Интернет (с помощью интерфейса Net Vision путем рассылки e-mail на электронный адрес потребителя). T.SERVICE обеспечивает диагностирование оборудования в режиме реального времени в течение 24 часов в сутки 365 дней в году. ИБП автоматически отправляет в центр технического обслуживания регулярные отчеты или отчеты при обнаружении неисправности. В зависимости от контролируемых параметров могут отправляться уведомления о неправильной эксплуатации (с пользователем связывается опытный специалист и рекомендует выполнить простые операции для предотвращения ухудшения рабочих характеристик оборудования) или о наличии отказа (пользователь информируется о состоянии устройства, а на место установки немедленно отправляется технический специалист).Профессиональное мнение
Наталья Маркина, коммерческий директор представительства компании SOCOMEC
Управляющее ПО фирмы SOCOMEC легко интегрируется в общий контур управления инженерной инфраструктурой ЦОД посредством разнообразных интерфейсов передачи данных ИБП. Установленное в аппаратной или ЦОД оборудование SOCOMEC может дистанционно обмениваться информацией о своих рабочих параметрах с системами централизованного управления и компьютерными сетями посредством сухих контактов, последовательных портов RS232, RS422, RS485, а также через интерфейс MODBUS TCP и GSS.
Интерфейс GSS предназначен для коммуникации с генераторными установками и включает в себя 4 входа (внешние контакты) и 1 выход (60 В). Это позволяет программировать особые процедуры управления, Global Supply System, которые обеспечивают полную совместимость ИБП с генераторными установками.
У компании Socomec имеется широкий выбор интерфейсов и коммуникационного программного обеспечения для установки диалога между ИБП и удаленными системами мониторинга промышленного и компьютерного оборудования. Такие опции связи, как панель дистанционного управления, интерфейс ADC (реконфигурируемые сухие контакты), обеспечивающий ввод и вывод данных при помощи сигналов сухих контактов, интерфейсы последовательной передачи данных RS232, RS422, RS485 по протоколам JBUS/MODBUS, PROFIBUS или DEVICENET, MODBUS TCP (JBUS/MODBUS-туннелирование), интерфейс NET VISION для локальной сети Ethernet, программное обеспечение TOP VISION для выполнения мониторинга с помощью рабочей станции Windows XP PRO — все это позволяет контролировать работу ИБП удобным для пользователя способом.
Весь контроль управления ИБП, ДГУ, контроль окружающей среды сводится в единый диспетчерский пункт посредством протоколов JBUS/MODBUS.
Индустриальный подход
Третий метод основан на использовании высокоскоростной индустриальной интерфейсной шины: CANBus, JBus, MODBus, PROFIBus и проч. Некоторые модели ИБП поддерживают разновидность универсального smart-слота для установки как карточек SNMP, так и интерфейсной шины. Система мониторинга на базе индустриальной шины может быть интегрирована в уже существующую промышленную SCADA-систему контроля и получения данных либо создана как заказное решение на базе многофункциональных стандартных контроллеров с выходом на шину. Промышленная шина через шлюзы передает информацию на удаленный диспетчерский пункт или в систему управления зданием (Building Management System, BMS). В эту систему могут быть интегрированы и контроллеры, управляющие ИБП.
Универсальные SCADA-системы поддерживают датчики и контроллеры широкого перечня производителей, но они недешевы и к тому же неудобны для внесения изменений. Но если подобная система уже функционирует на объекте, то интеграция в нее дополнительных ИБП не представляет труда.
Сергей Ермаков, технический директор компании Inelt, считает, что применение универсальных систем управления на базе промышленных контроллеров нецелесообразно, если используется для мониторинга только ИБП и ДГУ. Один из практичных подходов — создание заказной системы, с удобной для заказчика графической оболочкой и необходимым уровнем детализации — от карты местности до поэтажного плана и погружения в мнемосхему компонентов ИБП.
— ИБП может передавать одинаковое количество информации о своем состоянии и по прямому соединению, и по SNMP, и по Bus-шине, — говорит Сергей Ермаков. — Применение того или иного метода зависит от конкретной задачи и бюджета. Создав первоначально систему UPS Look для мониторинга ИБП, мы интегрировали в нее систему мониторинга ДГУ на основе SNMP-протокола, после чего по желанию одного из заказчиков конвертировали эту систему на промышленную шину Jbus. Новое ПО JSLook для мониторинга неограниченного количества ИБП и ДГУ по протоколу JBus является полнофункциональным средством мониторинга всей системы электроснабжения объекта.Профессиональное мение
Денис Андреев, руководитель департамента ИБП компании Landata
Практически все ИБП Eaton позволяют использовать коммуникационную Web-SNMP плату Connect UPS и датчик EMP (Environmental Monitoring Probe). Такой комплект позволяет в числе прочего осуществлять мониторинг температуры, влажности и состояния пары «сухих» контактов, к которым можно подключить внешние датчики.
Решение Eaton Environmental Rack Monitor представляет собой аналог такой связки, но с существенно более широким функционалом. Внешне эта система мониторинга температуры, влажности и состояния «сухих» контактов выполнена в виде компактного устройства, которое занимает минимум места в шкафу или в помещении.
Благодаря наличию у Eaton Environmental Rack Monitor (ERM) двух выходов датчики температуры или влажности можно разместить в разных точках стойки или помещения. Поскольку каждый из двух датчиков имеет еще по два сухих контакта, с них дополнительно можно принимать сигналы от датчиков задымления, утечки и проч. В центре обработки данных такая недорогая система ERM, состоящая из неограниченного количества датчиков, может транслировать информацию по протоколу SNMP в HTML-страницу и позволяет, не приобретая специального ПО, получить сводную таблицу измеряемых величин через веб-браузер.
Проблему дефицита пространства и высокой плотности размещения оборудования в серверных и ЦОД решают системы распределения питания линейки Eaton eDPU, которые можно установить как внутри стойки, так и на группу стоек.
Все модели этой линейки представляют четыре семейства: системы базового исполнения, системы с индикацией потребляемого тока, с мониторингом (локальным и удаленным, по сети) и управляемые, с возможностью мониторинга и управления электропитанием вплоть до каждой розетки. С помощью этих устройств можно компактным способом увеличить количество розеток в одной стойке, обеспечить контроль уровня тока и напряжения критичной нагрузки.
Контроль уровня потребляемой мощности может осуществляться с высокой степенью детализации, вплоть до сервера, подключенного к конкретной розетке. Это позволяет выяснить, какой сервер перегревается, где вышел из строя вентилятор, блок питания и т. д. Программным образом можно запустить сервер, подключенный к розетке ePDU. Интеграция системы контроля ePDU в платформу управления Eaton находится в процессе реализации.Требование объекта
Как поясняет Олег Письменский, в критичных объектах, таких как ЦОД, можно условно выделить две области контроля и управления. Первая, Grey Space, — это собственно здание и соответствующая система его энергообеспечения и энергораспределения. Вторая, White Space, — непосредственно машинный зал с его системами.
Выбор системы управления энергообеспечением ЦОД определяется типом объекта, требуемым функционалом системы управления и отведенным на эти цели бюджетом. В большинстве случаев кратковременная задержка между наступлением события и получением информации о нем системой мониторинга по SNMP-протоколу допустима. Тем не менее в целом ряде случаев, если характеристики объекта подразумевают непрерывность его функционирования, объект является комплексным и содержит большое количество элементов, требующих контроля и управления в реальном времени, ни одна стандартная система SNMP-мониторинга не обеспечит требуемого функционала. Для таких объектов применяют системы управления real-time, построенные на базе программно-аппаратных комплексов сбора данных, в том числе c функциями Softlogic.
Системы диспетчеризации и управления крупными объектами реализуются SCADA-системами, широкий перечень которых сегодня присутствует на рынке; представлены они и в портфеле решений Schneider Electric. Тип SCADA-системы зависит от класса и размера объекта, от количества его элементов, требующих контроля и управления, от уровня надежности. Частный вид реализации SCADA — это BMS-система(Building Management System).
«Дата-центры с объемом потребляемой мощности до 1,5 МВт и уровнем надежности Tier I, II и, с оговорками, даже Tier III, могут обслуживаться без дополнительной SCADA-системы, — говорит Олег Письменский. — На таких объектах целесообразно применять ISX Central — программно-аппаратный комплекс, использующий SNMP. Если же категория и мощность однозначно предполагают непрерывность управления, в таких случаях оправданна комбинация SNMP- и SCADA-системы. Например, для машинного зала (White Space) применяется ISX Central с возможными расширениями как Change & Capacity Manager, в комбинации со SCADA-системой, управляющей непосредственно объектом (Grey Space)».Профессиональное мнение
Олег Письменский, директор департамента консалтинга APC by Schneider Electric в России и СНГ
Подход APC by Schneider Electric к реализации полномасштабного полноуправляемого и надежного ЦОД изначально был основан на базисных принципах управления ИТ-инфраструктурой в рамках концепции ITIL/ITSM. И история развития системы управления инфраструктурой ЦОД ISX Manager, которая затем интегрировалась с программно-аппаратным комплексом NetBotz и трансформировалась в портал диспетчеризации ISX Central, — лучшее тому доказательство.
Первым итогом поэтапного приближения к намеченной цели стало наращивание функций контроля параметров энергообеспечения. Затем в этот контур подключилась система управления кондиционированием, система контроля параметров окружающей среды. Очередным шагом стало измерение скорости воздуха, влажности, пыли, радиации, интеграция сигналов от камер аудио- и видеонаблюдения, системы управления блоками розеток, завершения работы сервера и т. д.
Эта система не может и не должна отвечать абсолютно всем принципам ITSM, потому что не все они касаются существа поставленной задачи. Но как только в отношении политик и некоторых тактик управления емкостью и изменениями в ЦОД потребовался соответствующий инструментарий — это нашло отражение в расширении функционала ISX Central, который в настоящее время реализуют ПО APC by Schneider Electric Capacity Manager и APC by Schneider Electric Change Manager. С появлением этих двух решений, интегрированных в систему управления реальным объектом, АРС предоставляет возможность службе эксплуатации оптимально планировать изменения количественного и качественного состава оборудования машинного зала — как на ежедневном оперативном уровне, так и на уровне стратегических задач массовых будущих изменений.
Решение APC by Schneider Electric Capacity обеспечивает автоматизированную обработку информации о свободных ресурсах инженерной инфраструктуры, реальном потреблении мощности и пространстве в стойках. Обращаясь к серверу ISX Central, системы APC by Schneider Electric Capacity Manager и APC by Schneider Electric Change Manager оценивают степень загрузки ИБП и систем охлаждения InRow, прогнозируют воздействие предполагаемых изменений и предлагают оптимальное место для установки нового или перестановки имеющегося оборудования. Новые решения позволяют, выявив последствия от предполагаемых изменений, правильно спланировать замену оборудования в ЦОД.
Переход от частного к общему может потребовать интеграции ISX Central в такие, например, порталы управления, как Tivoli или Open View. Возможны и другие сценарии, когда ISX Central вписывается и в SCADA–систему. В этом случае ISX Central выполняет роль диспетчерской настройки, функционал которой распространяется на серверную комнату, но не охватывает целиком периметр объекта.Случай из практики
Решение задачи управления энергообеспечением ЦОД иногда вступает в противоречие с правилами устройств электроустановок (ПУЭ). Может оказаться, что в соответствии с ПУЭ в ряде случаев (например, при компоновке щитов ВРУ) необходимо обеспечить механические блокировки. Однако далеко не всегда это удается сделать. Поэтому такая задача часто требует нетривиального решения.
— В одном из проектов, — вспоминает Алексей Сарыгин, — где система управления включала большое количество точек со взаимными пересечениями блокировок, требовалось не допустить снижения общей надежности системы. В этом случае мы пришли к осознанному компромиссу, сделали систему полуавтоматической. Там, где это было возможно, присутствовали механические блокировки, за пультом дежурной смены были оставлены функции мониторинга и анализа, куда сводились все данные о положении всех автоматов. Но исполнительную часть вывели на отдельную панель управления уже внутри ВРУ, где были расположены подробные пользовательские инструкции по оперативному переключению. Таким образом мы избавились от излишней автоматизации, но постарались минимизировать потери в надежности и защититься от ошибок персонала.
[ http://www.computerra.ru/cio/old/products/infrastructure/421312/]Тематики
EN
Русско-английский словарь нормативно-технической терминологии > управление электропитанием
120 аварийный
аварийная гидравлическая системаemergency hydraulic systemаварийная кислородная маскаquick-donning maskаварийная командаwrecking crewаварийная машинаcrash truckаварийная обстановка1. accident environment2. emergency аварийная обстановка на аэродромеaerodrome emergencyаварийная подъездная дорогаemergency access roadаварийная посадка1. emergency landing2. crash landing 3. distress landing аварийная посадочная полосаcrash landing stripаварийная связьdistress communicationаварийная связь с воздушным судномair distress communicationаварийная сигнализацияwarning indicationаварийная системаemergency system(для применения в случае отказа основной) аварийная ситуацияemergency situationаварийная ситуация в полетеin-flight emergencyаварийная ситуация с воздушным судномaircraft emergencyаварийная служба1. emergency operations service2. emergency service аварийная стадияemergency phaseаварийная частотаemergency frequencyаварийная эвакуацияemergency evacuationаварийное оборудованиеemergency equipmentаварийное радиооборудованиеemergency radioаварийное светосигнальное оборудованиеemergency lightingаварийное снижение1. emergency descent2. emergency descent operation аварийное сообщениеalerting messageаварийное состояниеstate of emergencyаварийное таблоwarning annunciatorаварийное табло в кабине экипажаcabin emergency lightаварийное торможениеemergency brakingаварийное тормозное устройствоcrash barrierаварийное управлениеemergency controlаварийное шассиemergency landing gearаварийно сливатьdumpаварийно сливать за бортdump overboardаварийно сливать топливоjettison fuelаварийные воздушные перевозкиdistress trafficаварийные условия1. emergency conditions2. accident conditions аварийный бортовой трап - лотокaircraft escape chuteаварийный бюллетень на доработкуalert service bulletinаварийный вызовdistress callаварийный выпуск шассиemergency landing gear extensionаварийный выходemergency exitаварийный источник энергопитанияemergency power supplyаварийный клапан сброса давления в системе кондиционированияconditioned air emergency valveаварийный останов1. emergency cutoff2. emergency shutdown аварийный приводной маякemergency location beaconаварийный приводной передатчикemergency locator transmitterаварийный регистраторcrash recorderаварийный слив1. dumping2. jettisoning аварийный слив топливаfuel dumpingаварийный топорemergency axeаварийный трапescape slideаэродромная аварийная службаaerodrome emergency serviceаэродромная служба аварийного оповещенияaerodrome alerting serviceблок управления аварийной сигнализацииwarning system control unitбортовой аварийный приводной маякaircraft emergency locator beaconв аварийной обстановкеin emergencyвыключатель аварийного сбросаemergency release switchвыключатель аварийной разгерметизацииemergency depressurization switchвыполнять установленный порядок действий в аварийной ситуацииexecute an emergency procedureвысота порога аварийного выхода1. emergency exit stepup(над полом кабины пассажиров) 2. emergency exit stepdown (над обшивкой крыла) доступ к аварийному выходуemergency exit accessзаклинивание аварийного выходаemergency exit jammingзвуковая аварийная сигнализацияaudio warning deviceиндикатор аварийного состоянияunsafe indicatorинструктаж при аварийной обстановке в полетеinflight emergency instructionиспытание на аварийное приводнениеditching testканат аварийного покиданияescape ropeкран аварийного слива топливаjettison valveлампа аварийной сигнализацииemergency lightлюк аварийного выхода на крылоoverwing emergency exitлюк для аварийного покиданияemergency escape hatchмеры на случай аварийной посадкиemergency landing provisionsмеры на случай аварийных ситуацийprovisions for emergenciesместо аварийного вырубания обшивкиbreak-in pointмеханизм аварийного выпуска шассиemergency extension assemblyоборудование для аварийного приводненияditching equipmentобязанности экипажа в аварийной обстановкеcrew emergency dutyосвещение аварийного выходаemergency exit lightотработка действий на случай аварийной обстановки в аэропортуaerodrome emergency exerciseпокидание после аварийной посадкиevacuation in crash landingпорядок аварийного покиданияemergency evacuation procedureпорядок действий в аварийной обстановкеemergency procedureпост аварийного оповещенияalerting postправила полета в аварийной обстановкеemergency flight proceduresразработка мероприятий на случай аварийной обстановки на аэродромеaerodrome emergency planningрукоятка аварийного сброса люкаdoor jettison handleсветовая аварийная сигнализацияlight alarmсеть аварийного оповещенияwarning broadcast netсигнализатор аварийного давленияpressure warning switchсигнализация аварийной обстановки в полетеair alert warningсистема аварийного оповещенияalerting systemсистема аварийного освещенияemergency lighting systemсистема аварийного остановаemergency shutdown system(двигателя) система аварийного открытия замков убранного положенияemergency uplock release system(шасси) система аварийного слива топлива1. fuel dump system2. fuel jettisoning system, fuel jettisonning system система аварийного торможенияemergency brake systemсистема аварийного энергопитанияemergency power systemсистема аварийной сигнализацииemergency warning systemсистема общей аварийной сигнализацииgeneral alarm systemскорость аварийного слива топливаfuel dumping rateскорость при аварийном сниженииemergency descent speedслужба аварийного оповещенияalerting serviceсредство визуального аварийного оповещенияvisual warning deviceсхема аварийной эвакуацииemergency evacuation diagramцвет аварийной сигнализацииwarning light colorшина аварийного электропитанияemergency busСтраницыСм. также в других словарях:
БЛОК-СИСТЕМА — БЛОК СИСТЕМА, блок системы, жен. (ж. д.). Блокировка, блокировочная система. см. блок. Толковый словарь Ушакова. Д.Н. Ушаков. 1935 1940 … Толковый словарь Ушакова
блок-система — блок система, блок системы … Орфографический словарь-справочник
блок-система — ы, ж. bloc système. ж. д. Блокировка, блокировочная система. Уш. 1935 … Исторический словарь галлицизмов русского языка
блок-система — іменник жіночого роду … Орфографічний словник української мови
Блок (механика) — У этого термина существуют и другие значения, см. Блок. Система из подвижного и неподвижного блоков … Википедия
Блок, машина — Система из подвижного и неподвижного блоков Схема четырёх систем из блоков Блок простое механическое устройство, позволяющее регулировать силу, ось которого закреплена при подьеме грузов не поднимаеться и не опускается. Представляет собой колесо… … Википедия
Блок периодической таблицы — это совокупность химических элементов со сходным расположением валентных электронов в атоме. Сходство заключается в том, что валентные электроны с наивысшей энергией у них занимают орбиталь одного типа. Термин впервые появился в работах… … Википедия
Система противоракетной обороны (ПРО) США — Впервые с идеей создания системы обороны от ракет командование армии США выступило в 1945 г. Тогда исследовательская группа ВВС США предложила использовать для борьбы с ракетами потоки энергии. В конце 1940 х гг. США начали разработку… … Энциклопедия ньюсмейкеров
блок — 1. конструктивная совокупность функционально самостоятельных элементов, образующая функционально самостоятельное единое целое 2. строительный конструктивный элемент, представляющий собой составную часть сооружения 3. деталь грузоподъёмного… … Справочник технического переводчика
Система "БРЕДЛИ" — Армия США, имевшая во время второй мировой наибольшее количество БТР, после войны продолжала рассматривать их как боевые такси , позволяющие полностью механизировать войска. Однако в свете возросших требований к проходимости, а также… … Энциклопедия техники
Система GPS — (Global Positioning System глобальная система позиционирования) – глобальная навигационная спутниковая система. Разработана и эксплуатируется Министерством обороны США. Глобальная система позиционирования работает в любых метеорологических… … Энциклопедия ньюсмейкеров
 18+© Академик, 2000-2024
18+© Академик, 2000-2024- Обратная связь: Техподдержка, Реклама на сайте
Экспорт словарей на сайты, сделанные на PHP, Joomla, Drupal, WordPress, MODx.
Перевод: с русского на все языки
со всех языков на русский- Со всех языков на:
- Русский
- С русского на:
- Все языки
- Азербайджанский
- Английский
- Белорусский
- Немецкий
- Украинский
- Французский