-
41 reperforator
реперфоратор (приёмник, содержащий в основном перфоратор, работающий под управлением принимаемых телеграфных сигналов или сигналов данных)Англо-русский словарь промышленной и научной лексики > reperforator
-
42 вариант
вариант
выбор
версия
Вид структуры данных, разновидность сигналов или один из нескольких возможных исходов какого-либо события.
[Л.М. Невдяев. Телекоммуникационные технологии. Англо-русский толковый словарь-справочник. Под редакцией Ю.М. Горностаева. Москва, 2002]Тематики
- электросвязь, основные понятия
Синонимы
EN
2.68 вариант (variant): Конфигурация всей информационной системы или ее части, наряду с которой существует другая система, имеющая другую конфигурацию, обеспечивающая те же услуги.
Источник: ГОСТ Р ИСО/МЭК ТО 10032-2007: Эталонная модель управления данными
Русско-английский словарь нормативно-технической терминологии > вариант
-
43 каналы связи
каналы связи
Средства, используемые для взаимного соединения различных блоков для передачи сигналов, обработки данных или подачи энергии.
Это оборудование обычно является электрическим, однако отдельные его части могут быть механическими, пневматическими, гидравлическими или оптическими.
[ ГОСТ Р 41.13-2007]Тематики
EN
Русско-английский словарь нормативно-технической терминологии > каналы связи
-
44 менеджер подвижности
менеджер подвижности
Хранилище информации и объединенные с ним процессы, доступ к которым имеет функция управления персональной подвижностью или управления подвижностью терминала. Менеджер подвижности используется для управления местоположением, регистрации терминала и регистрации пользователя. Менеджер подвижности это функциональная концепция, которая может быть выполнена различными способами, например, как база данных или как пункт передачи сигналов (МСЭ-R M.1224).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
Русско-английский словарь нормативно-технической терминологии > менеджер подвижности
-
45 каскадная обработка
( сигналов или данных при моделировании логических устройств) cascade-based processingРусско-английский словарь по вычислительной технике и программированию > каскадная обработка
-
46 выигрыш от обработки
( сигналов или данных) processing gainРусско-английский политехнический словарь > выигрыш от обработки
-
47 широковещательное объектно-ориентированное сообщение о событии на подстанции
GOOSE-сообщение
-
[Интент]
широковещательное объектно-ориентированное сообщение о событии на подстанции
Широковещательный высокоскоростной внеочередной отчет, содержащий статус каждого из входов, устройств пуска, элементов выхода и реле, реальных и виртуальных.
Примечание. Этот отчет выдается многократно последовательно, как правило, сразу после первого отчета с интервалами 2, 4, 8,…, 60000 мс. Значение задержки первого повторения является конфигурируемым. Такой отчет обеспечивает выдачу высокоскоростных сигналов отключения с высокой вероятностью доставки.
[ ГОСТ Р 54325-2011 (IEC/TS 61850-2:2003)]
общие объектно-ориентированные события на подстанции
-
[ ГОСТ Р МЭК 61850-7-2-2009]
GOOSE
Generic Object Oriented Substation Event (стандарт МЭК 61850-8-1)
Протокол передачи данных о событиях на подстанции.
Один из трех протоколов передачи данных, предлагаемых к использованию в МЭК 61850.
Фактически данный протокол служит для замены медных кабельных связей, предназначенных для передачи дискретных сигналов между устройствами.
[ Цифровые подстанции. Проблемы внедрения устройств РЗА]EN
generic object oriented substation event
on the occurrence of any change of state, an IED will multicast a high speed, binary object, Generic Object Oriented Substation Event (GOOSE) report by exception, typically containing the double command state of each of its status inputs, starters, output elements and relays, actual and virtual.
This report is re-issued sequentially, typically after the first report, again at intervals of 2, 4, 8…60000 ms. (The first repetition delay value is an open value it may be either shorter or longer).
A GOOSE report enables high speed trip signals to be issued with a high probability of delivery
[IEC 61850-2, ed. 1.0 (2003-08)]До недавнего времени для передачи дискретных сигналов между терминалами релейной защиты и автоматики (РЗА) использовались дискретные входы и выходные реле. Передача сигнала при этом осуществляется подачей оперативного напряжения посредством замыкания выходного реле одного терминала на дискретный вход другого терминала (далее такой способ передачи будем называть традиционным).
Такой способ передачи информации имеет следующие недостатки:- необходимо большое количество контрольных кабелей, проложенных между шкафами РЗА,
- терминалы РЗА должны иметь большое количество дискретных входов и выходных реле,
- количество передаваемых сигналов ограничивается определенным количеством дискретных входов и выходных реле,
- отсутствие контроля связи между терминалами РЗА,
- возможность ложного срабатывания дискретного входа при замыкании на землю в цепи передачи сигнала.
Информационные технологии уже давно предоставляли возможность для передачи информации между микропроцессорными терминалами по цифровой сети. Разработанный недавно стандарт МЭК 61850 предоставил такую возможность для передачи сигналов между терминалами РЗА.
Стандарт МЭК 61850 использует для передачи данных сеть Ethernet. Внутри стандарта МЭК 61850 предусмотрен такой механизм, как GOOSE-сообщения, которые и используются для передачи сообщений между терминалами РЗА.
Принцип передачи GOOSE-сообщений показан на рис. 1.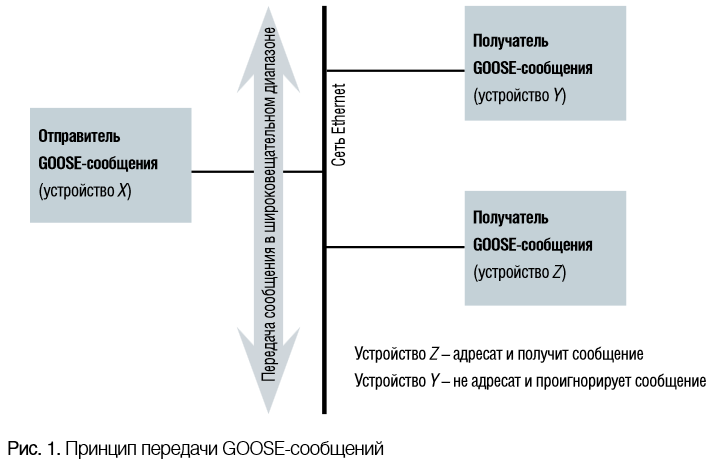
Устройство-отправитель передает по сети Ethernet информацию в широковещательном диапазоне.
В сообщении присутствует адрес отправителя и адреса, по которым осуществляется его передача, а также значение сигнала (например «0» или «1»).
Устройство-получатель получит сообщение, а все остальные устройства его проигнорируют.
Поскольку передача GOOSE-сообщений осуществляется в широковещательном диапазоне, т.е. нескольким адресатам, подтверждение факта получения адресатами сообщения отсутствует. По этой причине передача GOOSE-сообщений в установившемся режиме производится с определенной периодичностью.
При наступлении нового события в системе (например, КЗ и, как следствие, пуска измерительных органов защиты) начинается спонтанная передача сообщения через увеличивающиеся интервалы времени (например, 1 мс, 2 мс, 4 мс и т.д.). Интервалы времени между передаваемыми сообщениями увеличиваются, пока не будет достигнуто предельное значение, определяемое пользователем (например, 50 мс). Далее, до момента наступления нового события в системе, передача будет осуществляется именно с таким периодом. Указанное проиллюстрировано на рис. 2.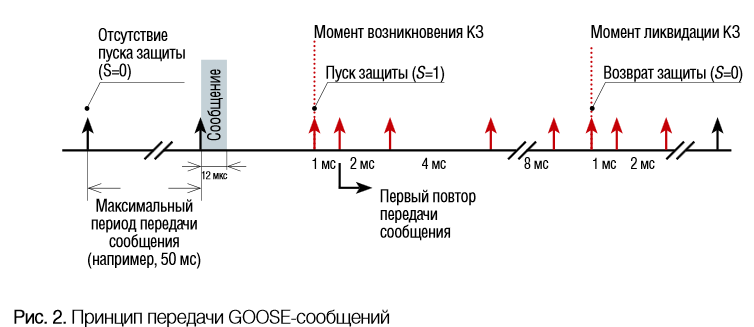
Технология повторной передачи не только гарантирует получение адресатом сообщения, но также обеспечивает контроль исправности линии связи и устройств – любые неисправности будут обнаружены по истечении максимального периода передачи GOOSE-сообщений (с точки зрения эксплуатации практически мгновенно). В случае передачи сигналов традиционным образом неисправность выявляется либо в процессе плановой проверки устройств, либо в случае неправильной работы системы РЗА.
Еще одной особенностью передачи GOOSE-сообщений является использование функций установки приоритетности передачи телеграмм (priority tagging) стандарта Ethernet IEEE 802.3u, которые не используются в других протоколах, в том числе уровня TCP/IP. То есть GOOSE-сообщения идут в обход «нормальных» телеграмм с более высоким приоритетом (см. рис. 3).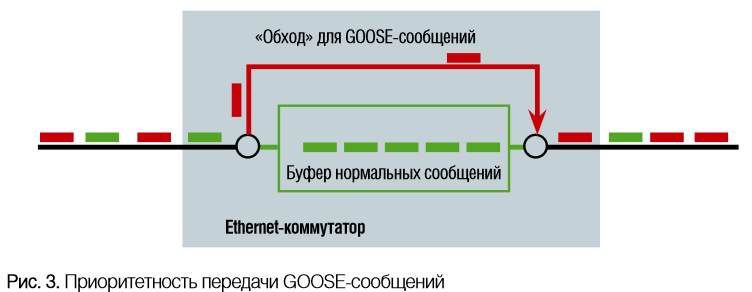
Однако стандарт МЭК 61850 декларирует передачу не только дискретной информации между терминалами РЗА, но и аналоговой. Это означает, что в будущем будет иметься возможность передачи аналоговой информации от ТТ и ТН по цифровым каналам связи. На данный момент готовых решений по передаче аналоговой информации для целей РЗА (в рамках стандарта МЭК 61850) ни один из производителей не предоставляет.
Для того чтобы использовать GOOSE-сообщения для передачи дискретных сигналов между терминалами РЗА необходима достаточная надежность и быстродействие передачи GOOSE-сообщений. Надежность передачи GOOSE-сообщений обеспечивается следующим:- Протокол МЭК 61850 использует Ethernet-сеть, за счет этого выход из строя верхнего уровня АСУ ТП и любого из устройств РЗА не отражается на передаче GOOSE-сообщений оставшихся в работе устройств,
- Терминалы РЗА имеют два независимых Ethernet-порта, при выходе одного из них из строя второй его полностью заменяет,
- Сетевые коммутаторы, к которым подключаются устройства РЗА, соединяются в два независимых «кольца»,
- Разные порты одного терминала РЗА подключаются к разным сетевым коммутаторам, подключенным к разным «кольцам»,
- Каждый сетевой коммутатор имеет дублированное питание от разных источников,
- Во всех устройствах РЗА осуществляется постоянный контроль возможности прохождения каждого сигнала. Это позволяет автоматически определить не только отказы цифровой связи, но и ошибки параметрирования терминалов.
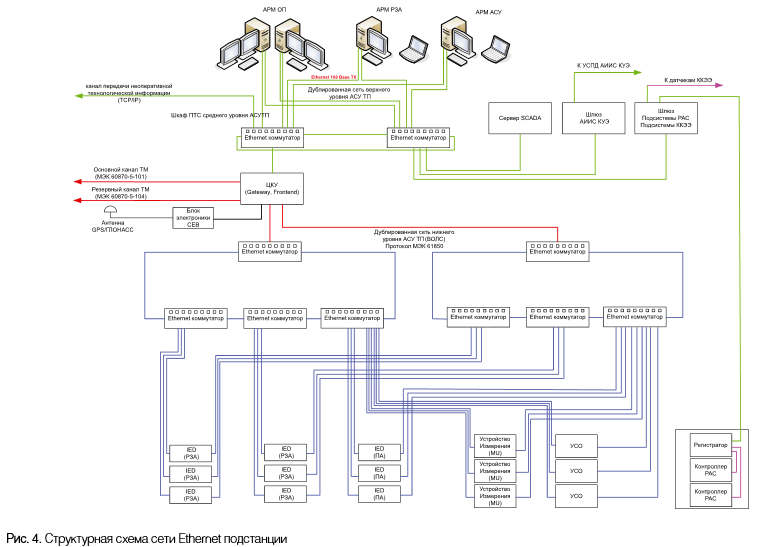
На рис. 4 изображен пример структурной схемы сети Ethernet (100 Мбит/c) подстанции. Отказ в передаче GOOSE-сообщения от одного устройства защиты другому возможен в результате совпадения как минимум двух событий. Например, одновременный отказ двух коммутаторов, к которым подключено одно устройство или одновременный отказ обоих портов одного устройства. Могут быть и более сложные отказы, связанные с одновременным наложением большего количества событий. Таким образом, единичные отказы оборудования не могут привести к отказу передачи GOOSEсообщений. Дополнительно увеличивает надежность то обстоятельство, что даже в случае отказа в передаче GOOSE-сообщения, устройство, принимающее сигнал, выдаст сигнал неисправности, и персонал примет необходимые меры для ее устранения.
Быстродействие.
В соответствии с требованиями стандарта МЭК 61850 передача GOOSE-сообщений должна осуществляться со временем не более 4 мс (для сообщений, требующих быстрой передачи, например, для передачи сигналов срабатывания защит, пусков АПВ и УРОВ и т.п.). Вообще говоря, время передачи зависит от топологии сети, количества устройств в ней, загрузки сети и загрузки вычислительных ресурсов терминалов РЗА, версии операционной системы терминала, коммуникационного модуля, типа центрального процессора терминала, количества коммутаторов и некоторых других аспектов. Поэтому время передачи GOOSE-сообщений должно быть подтверждено опытом эксплуатации.
Используя для передачи дискретных сигналов GOOSE-сообщения необходимо обращать внимание на то обстоятельство, что при использовании аппаратуры некоторых производителей, в случае отказа линии связи, значение передаваемого сигнала может оставаться таким, каким оно было получено в момент приема последнего сообщения.
Однако при отказе связи бывают случаи, когда сигнал должен принимать определенное значение. Например, значение сигнала блокировки МТЗ ввода 6–10 кВ в логике ЛЗШ при отказе связи целесообразно установить в значение «1», чтобы при КЗ на отходящем присоединении не произошло ложного отключения ввода. Так, к примеру, при проектировании терминалов фирмы Siemens изменить значение сигнала при отказе связи возможно с помощью свободно-программируемой CFCлогики (см. рис. 5).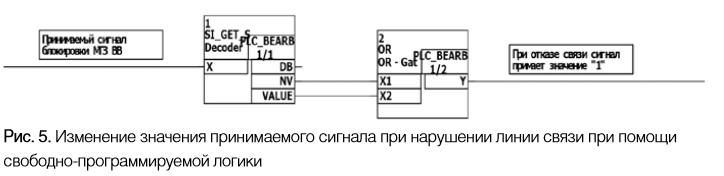
К CFC-блоку SI_GET_STATUS подводится принимаемый сигнал, на выходе блока мы можем получить значение сигнала «Value» и его статус «NV». Если в течение определенного времени не поступит сообщение со значением сигнала, статус сигнала «NV» примет значение «1». Далее статус сигнала и значение сигнала подводятся к элементу «ИЛИ», на выходе которого будет получено значение сигнала при исправности линии связи или «1» при нарушении исправности линии связи. Изменив логику, можно установить значение сигнала равным «0» при обрыве связи.
Использование GOOSE-сообщений предъявляет специальные требования к наладке и эксплуатации устройств РЗА. Во многом процесс наладки становится проще, однако при выводе устройства из работы необходимо следить не только за выводом традиционных цепей, но и не забывать отключать передачу GOOSE-сообщений.
При изменении параметрирования одного устройства РЗА необходимо производить загрузку файла параметров во все устройства, с которыми оно было связано.
В нашей стране имеется опыт внедрения и эксплуатации систем РЗА с передачей дискретных сигналов с использованием GOOSE-сообщений. На первых объектах GOOSE-сообщения использовались ограниченно (ПС 500 кВ «Алюминиевая»).
На ПС 500 кВ «Воронежская» GOOSEсообщения использовались для передачи сигналов пуска УРОВ, пуска АПВ, запрета АПВ, действия УРОВ на отключение смежного элемента, положения коммутационных аппаратов, наличия/отсутствия напряжения, сигналы ЛЗШ, АВР и т.п. Кроме того, на ОРУ 500 кВ и 110 кВ ПС «Воронежская» были установлены полевые терминалы, в которые собиралась информация с коммутационного оборудования и другая дискретная информация с ОРУ (рис. 6). Далее информация с помощью GOOSE-сообщений передавалась в терминалы РЗА, установленные в ОПУ подстанции (рис. 7, 8).
GOOSE-сообщения также были использованы при проектировании уже введенных в эксплуатацию ПС 500 кВ «Бескудниково», ПС 750 кВ «Белый Раст», ПС 330кВ «Княжегубская», ПС 220 кВ «Образцово», ПС 330 кВ «Ржевская». Эта технология применяется и при проектировании строящихся и модернизируемых подстанций ПС 500 кВ «Чагино», ПС 330кВ «Восточная», ПС 330 кВ «Южная», ПС 330 кВ «Центральная», ПС
330 кВ «Завод Ильич» и многих других.
Основные преимущества использования GOOSE-сообщений:- позволяет снизить количество кабелей вторичной коммутации на ПС;
- обеспечивает лучшую помехозащищенность канала связи;
- позволяет снизить время монтажных и пусконаладочных работ;
- исключает проблему излишнего срабатывания дискретных входов терминалов из-за замыканий на землю в цепях оперативного постоянного тока;
- убирает зависимость количества передаваемых сигналов от количества дискретных входов и выходных реле терминалов;
- обеспечивает возможность реконструкции и изменения связей между устройствами РЗА без прокладки дополнительных кабельных связей и повторного монтажа в шкафах;
- позволяет использовать МП терминалы РЗА с меньшим количеством входов и выходов (уменьшение габаритов и стоимости устройства);
- позволяет контролировать возможность прохождения сигнала (увеличивается надежность).
Безусловно, для окончательных выводов должен появиться достаточный опыт эксплуатации. В настоящее время большинство производителей устройств РЗА заявили о возможности использования GOOSEсообщений. Стандарт МЭК 61850 определяет передачу GOOSE-сообщений между терминалами разных производителей. Использование GOOSE-сообщений для передачи дискретных сигналов – это качественный скачок в развитии систем РЗА. С развитием стандарта МЭК 61850, переходом на Ethernet 1 Гбит/сек, с появлением новых цифровых ТТ и ТН, новых выключателей с возможностью подключения их блока управления к шине процесса МЭК 61850, эффективность использования GOOSE-сообщений намного увеличится. Облик будущих подстанций представляется с минимальным количеством контрольных кабелей, с передачей всех сообщений между устройствами РЗА, ТТ, ТН, коммутационными аппаратами через цифровую сеть. Устройства РЗА будут иметь минимальное количество выходных реле и дискретных входов
[ http://romvchvlcomm.pbworks.com/f/goosepaper1.pdf]
В стандарте определены два способа передачи данных напрямую между устройствами: GOOSE и GSSE. Это тоже пример наличия двух способов для реализации одной функции. GOOSE - более новый способ передачи сообщений, разработан специально для МЭК 61850. Способ передачи сообщений GSSE ранее присутствовал в стандарте UCA 2.0, являющимся одним из предшественников МЭК 61850. По сравнению с GSSE, GOOSE имеет более простой формат (Ethernet против стека OSI протоколов) и возможность передачи различных типов данных. Вероятно, способ GSSE включили в МЭК 61850 для того, чтобы производители, имеющие в своих устройствах протокол UCA 2.0, могли сразу декларировать соответствие МЭК 61850. В настоящее время все производители используют только GOOSE для передачи сообщений между устройствами.
Для выбора списка передаваемых данных в GOOSE, как и в отчѐтах, используются наборы данных. Однако тут требования уже другие. Время обработки GOOSE-сообщений должно быть минимальным, поэтому логично передавать наиболее простые типы данных. Обычно передаѐтся само значение сигнала и в некоторых случаях добавляется поле качества. Метка времени обычно включается в набор данных.
...
В устройствах серии БЭ2704 в передаваемых GOOSE-сообщениях содержатся данные типа boolean. Приниматься могут данные типа boolean, dbpos, integer.
Устоявшаяся тенденция существует только для передачи дискретной информации. Аналоговые данные пока передают немногие производители, и поэтому устоявшаяся тенденция в передаче аналоговой информации в данный момент отсутствует.
[ Источник]
Тематики
Синонимы
EN
Русско-английский словарь нормативно-технической терминологии > широковещательное объектно-ориентированное сообщение о событии на подстанции
-
48 синхронизация времени
синхронизация времени
-
[ ГОСТ Р МЭК 60870-5-103-2005]Также нормированы допустимые временные задержки для различных видов сигналов, включая дискретные сигналы, оцифрованные мгновенные значения токов и напряжений, сигналы синхронизации времени и т.п.
[Новости Электротехники №4(76) | СТАНДАРТ МЭК 61850]Широковещательное сообщение, как правило, содержит адрес отправителя и глобальный адрес получателя. Примером широковещательного сообщения служит синхронизация времени.
[ ГОСТ Р 54325-2011 (IEC/TS 61850-2:2003)]Устройства последних поколений дают возможность синхронизации времени с точностью до микросекунд с помощью GPS.
С помощью этого интерфейса сигнал синхронизации времени (от радиоприемника DCF77 сигнал точного времени из Braunschweig, либо от радиоприемника iRiG-B сигнал точного времени глобальной спутниковой системы GPS) может быть передан в терминал для точной синхронизации времени.
[Герхард Циглер. ЦИФРОВАЯ ДИСТАНЦИОННАЯ ЗАЩИТА. ПРИНЦИПЫ И ПРИМЕНЕНИЕ
Перевод с английского ]В том случае если принятое сообщение искажено ( повреждено) в результате неисправности канала связи или в результате потери синхронизации времени, пользователь имеет возможность...
2.13 Синхронизация часов реального времени сигналом по оптовходу
В современных системах релейной защиты зачастую требуется синхронизированная работа часов всех реле в системе для восстановления хронологии работы разных реле.
Это может быть выполнено с использованием сигналов синхронизации времени по интерфейсу IRIG-B, если реле оснащено таким входом или сигналом от системы OP
[Дистанционная защита линии MiCOM P443/ ПРИНЦИП РАБОТЫ]
СИНХРОНИЗАЦИЯ ВРЕМЕНИ СОГЛАСНО СТАНДАРТУ IEEE 1588
Автор: Андреас Дреер (Hirschmann Automation and Control)
Вопрос синхронизации устройств по времени важен для многих распределенных систем промышленной автоматизации. При использовании протокола Precision Time Protocol (PTP), описанного стандартом IEEE 1588, становится возможным выполнение синхронизации внутренних часов устройств, объединенных по сети Ethernet, с погрешностями, не превышающими 1 микросекунду. При этом к вычислительной способности устройств и пропускной способности сети предъявляются относительно низкие требования. В 2008 году была утверждена вторая редакция стандарта (IEEE 1588-2008 – PTP версия 2) с рядом внесенных усовершенствований по сравнению с первой его редакцией.
ЗАЧЕМ НЕОБХОДИМА СИНХРОНИЗАЦИЯ УСТРОЙСТВ ПО ВРЕМЕНИ?
Во многих системах должен производиться отсчет времени. О неявной системе отсчета времени можно говорить тогда, когда в системе отсутствуют часы и ход времени определяется процессами, протекающими в аппаратном и программном обеспечении. Этого оказывается достаточно во многих случаях. Неявная система отсчета времени реализуется, к примеру, передачей сигналов, инициирующих начало отсчета времени и затем выполнение определенных действий, от одних устройств другим.
Система отсчета времени считается явной, если показания времени в ней определяются часами. Указанное необходимо для сложных систем. Таким образом, осуществляется разделение процедур передачи данных о времени и данных о процессе.
Два эффекта должны быть учтены при настройке или синхронизации часов в отдельных устройствах. Первое – показания часов в отдельных устройствах изначально отличаются друг от друга (смещение показаний времени друг относительно друга). Второе – реальные часы не производят отсчет времени с одинаковой скоростью. Таким образом, требуется проводить постоянную корректировку хода самых неточных часов.
Существуют различные способы синхронизации часов в составе отдельных устройств, объединенных в одну информационную сеть. Наиболее известные способы – это использование протокола NTP (Network Time Protocol), а также более простого протокола, который образован от него – протокола SNTP (Simple Network Time Protocol). Данные методы широко распространены для использования в локальных сетях и сети Интернет и позволяют обеспечивать синхронизацию времени с погрешностями в диапазоне миллисекунд. Другой вариант – использование радиосигналов с GPS спутников. Однако при использовании данного способа требуется наличие достаточно дорогих GPS-приемников для каждого из устройств, а также GPS-антенн. Данный способ теоретически может обеспечить высокую точность синхронизации времени, однако материальные затраты и трудозатраты обычно препятствуют реализации такого метода синхронизации.
Другим решением является передача высокоточного временного импульса (например, одного импульса в секунду) каждому отдельному устройству по выделенной линии. Реализация данного метода влечет за собой необходимость создания выделенной линии связи к каждому устройству.
Последним методом, который может быть использован, является протокол PTP (Precision Time Protocol), описанный стандартом IEEE 1588. Протокол был разработан со следующими целями:
- Обеспечение синхронизация времени с погрешностью, не превышающей 1 микросекунды.
-
Предъявление минимальных требований к производительности процессоров устройств и к пропускной способности линии связи, что позволило бы обеспечить реализацию протокола в простых и дешевых устройствах.
- Предъявление невысоких требований к обслуживающему персоналу.
- Возможность использования в сетях Ethernet, а также в других сетях.
- Спецификация его как международного стандарта.
ОБЛАСТИ ПРИМЕНЕНИЯ ПРОТОКОЛА PTP
Протокол PTP может быть применен в различного рода системах. В системах автоматизации, протокол PTP востребован везде, где требуется точная синхронизация устройств по времени. Протокол позволяет синхронизировать устройства в робототехнике или печатной промышленности, в системах осуществляющих обработку бумаги и упаковку продукции и других областях.
В общем и целом в любых системах, где осуществляется измерение тех или иных величин и их сравнение с величинами, измеренными другими устройствами, использование протокола PTP является популярным решением. Системы управления турбинами используют протокол PTP для обеспечения более эффективной работы станций. События, происходящие в различных частях распределенных в пространстве систем, определяются метками точного времени и затем для целей архивирования и анализа осуществляется их передача на центры управления. Геоученые используют протокол PTP для синхронизации установок мониторинга сейсмической активности, удаленных друг от друга на значительные расстояния, что предоставляет возможность более точным образом определять эпицентры землетрясений. В области телекоммуникаций рассматривают возможность использования протокола PTP для целей синхронизации сетей и базовых станций. Также синхронизация времени согласно стандарту IEEE 1588 представляет интерес для разработчиков систем обеспечения жизнедеятельности, систем передачи аудио и видео потоков и может быть использована в военной промышленности.
В электроэнергетике протокол PTPv2 (протокол PTP версии 2) определен для синхронизации интеллектуальных электронных устройств (IED) по времени. Например, при реализации шины процесса, с передачей мгновенных значений тока и напряжения согласно стандарту МЭК 61850-9-2, требуется точная синхронизация полевых устройств по времени. Для реализации систем защиты и автоматики с использованием сети Ethernet погрешность синхронизации данных различных устройств по времени должна лежать в микросекундном диапазоне.
Также для реализации функций синхронизированного распределенного векторного измерения электрических величин согласно стандарту IEEE C37.118, учета, оценки качества электрической энергии или анализа аварийных событий необходимо наличие устройств, синхронизированных по времени с максимальной точностью, для чего может быть использован протокол PTP.
Вторая редакция стандарта МЭК 61850 определяет использование в системах синхронизации времени протокола PTP. Детализация профиля протокола PTP для использования на объектах электроэнергетики (IEEE Standard Profile for Use of IEEE 1588 Precision Time Protocol in Power System Applications) в настоящее время осуществляется рабочей группой комитета по релейной защите и автоматике организации (PSRC) IEEE.
В 2005 году была начата работа по изменению стандарта IEEE1588-2002 с целью расширения возможных областей его применения (телекоммуникации, беспроводная связь и в др.). Результатом работы стало новое издание IEEE1588-2008, которое доступно с марта 2008 со следующими новыми особенностями:
- Усовершенствованные алгоритмы для обеспечения погрешностей в наносекундном диапазоне.
- Повышенное быстродействие синхронизации времени (возможна более частая передача сообщений синхронизации Sync).
- Поддержка новых типов сообщений.
- Ввод однорежимного принципа работы (не требуется передачи сообщений типа FollowUp).
- Ввод поддержки функции т.н. прозрачных часов для предотвращения накопления погрешностей измерения при каскадной схеме соединения коммутаторов.
- Ввод профилей, определяющих настройки для новых областей применения.
- Возможность назначения на такие транспортные механизмы как DeviceNet, PROFInet и IEEE802.3/Ethernet (прямое назначение).
- Ввод структуры TLV (тип, длина, значение) для расширения возможных областей применения стандарта и удовлетворения будущих потребностей.
- Ввод дополнительных опциональных расширений стандарта.
ПРИНЦИП ФУНКЦИОНИРОВАНИЯ СИСТЕМ НА ОСНОВЕ ПРОТОКОЛА PTP
В системах, где используется протокол PTP, различают два вида часов: ведущие часы и ведомые часы. Ведущие часы, в идеале, контролируются либо радиочасами, либо GPS-приемниками и осуществляют синхронизацию ведомых часов. Часы в конечном устройстве, неважно ведущие ли они или ведомые, считаются обычными часами; часы в составе устройств сети, выполняющих функцию передачи и маршрутизации данных (например, в Ethernet-коммутаторах), считаются граничными часами.
Процедура синхронизации согласно протоколу PTP подразделяется на два этапа. На первом этапе осуществляется коррекция разницы показаний времени между ведущими и ведомыми часами – то есть осуществляется так называемая коррекция смещения показаний времени. Для этого ведущее устройство осуществляет передачу сообщения для целей синхронизации времени Sync ведомому устройству (сообщение типа Sync). Сообщение содержит в себе текущее показание времени ведущих часов и его передача осуществляется периодически через фиксированные интервалы времени. Однако поскольку считывание показаний ведущих часов, обработка данных и передача через контроллер Ethernet занимает некоторое время, информация в передаваемом сообщении к моменту его приема оказывается неактуальной. Одновременно с этим осуществляется как можно более точная фиксация момента времени, в который сообщение Sync уходит от отправителя, в составе которого находятся ведущие часы (TM1). Затем ведущее устройство осуществляет передачу зафиксированного момента времени передачи сообщения Sync ведомым устройствам (сообщение FollowUp). Те также как можно точнее осуществляют измерение момента времени приема первого сообщения (TS1) и вычисляют величину, на которую необходимо выполнить коррекцию разницы в показаниях времени между собою и ведущим устройством соответственно (O) (см. рис. 1 и рис. 2). Затем непосредственно осуществляется коррекция показаний часов в составе ведомых устройств на величину смещения. Если задержки в передачи сообщений по сети не было, то можно утверждать, что устройства синхронизированы по времени.
На втором этапе процедуры синхронизации устройств по времени осуществляется определение задержки в передаче упомянутых выше сообщений по сети между устройствами. Указанное выполняется при использовании сообщений специального типа. Ведомое устройство отправляет так называемое сообщение Delay Request (Запрос задержки в передаче сообщения по сети) ведущему устройству и осуществляет фиксацию момента передачи данного сообщения. Ведущее устройство фиксирует момент приема данного сообщения и отправляет зафиксированное значение в сообщении Delay Response (Ответное сообщение с указанием момента приема сообщения). Исходя из зафиксированных времен передачи сообщения Delay Request ведомым устройством и приема сообщения Delay Response ведущим устройством производится оценка задержки в передачи сообщения между ними по сети. Затем производится соответствующая коррекция показаний часов в ведомом устройстве. Однако все упомянутое выше справедливо, если характерна симметричная задержка в передаче сообщения в обоих направлениях между устройствами (то есть характерны одинаковые значения в задержке передачи сообщений в обоих направлениях).
Задержка в передачи сообщения в обоих направлениях будет идентичной в том случае, если устройства соединены между собой по одной линии связи и только. Если в сети между устройствами имеются коммутаторы или маршрутизаторы, то симметричной задержка в передачи сообщения между устройствами не будет, поскольку коммутаторы в сети осуществляют сохранение тех пакетов данных, которые проходят через них, и реализуется определенная очередность их передачи. Эта особенность может, в некоторых случаях, значительным образом влиять на величину задержки в передаче сообщений (возможны значительные отличия во временах передачи данных). При низкой информационной загрузке сети этот эффект оказывает малое влияние, однако при высокой информационной загрузке, указанное может значительным образом повлиять на точность синхронизации времени. Для исключения больших погрешностей был предложен специальный метод и введено понятие граничных часов, которые реализуются в составе коммутаторов сети. Данные граничные часы синхронизируются по времени с часами ведущего устройства. Далее коммутатор по каждому порту является ведущим устройством для всех ведомых устройств, подключенных к его портам, в которых осуществляется соответствующая синхронизация часов. Таким образом, синхронизация всегда осуществляется по схеме точка-точка и характерна практически одинаковая задержка в передаче сообщения в прямом и обратном направлении, а также практическая неизменность этой задержки по величине от одной передачи сообщения к другой.
Хотя принцип, основанный на использовании граничных часов показал свою практическую эффективность, другой механизм был определен во второй версии протокола PTPv2 – механизм использования т. н. прозрачных часов. Данный механизм предотвращает накопление погрешности, обусловленной изменением величины задержек в передаче сообщений синхронизации коммутаторами и предотвращает снижение точности синхронизации в случае наличия сети с большим числом каскадно-соединенных коммутаторов. При использовании такого механизма передача сообщений синхронизации осуществляется от ведущего устройства ведомому, как и передача любого другого сообщения в сети. Однако когда сообщение синхронизации проходит через коммутатор фиксируется задержка его передачи коммутатором. Задержка фиксируется в специальном поле коррекции в составе первого сообщения синхронизации Sync или в составе последующего сообщения FollowUp (см. рис. 2). При передаче сообщений Delay Request и Delay Response также осуществляется фиксация времени задержки их в коммутаторе. Таким образом, реализация поддержки т. н. прозрачных часов в составе коммутаторов позволяет компенсировать задержки, возникающие непосредственно в них.
Если необходимо использование протокола PTP в системе, должен быть реализован стек протокола PTP. Это может быть сделано при предъявлении минимальных требований к производительности процессоров устройств и к пропускной способности сети. Это очень важно для реализации стека протокола в простых и дешевых устройствах. Протокол PTP может быть без труда реализован даже в системах, построенных на дешевых контроллерах (32 бита).
Единственное требование, которое необходимо удовлетворить для обеспечения высокой точности синхронизации, – как можно более точное измерение устройствами момента времени, в который осуществляется передача сообщения, и момента времени, когда осуществляется прием сообщения. Измерение должно производится максимально близко к аппаратной части (например, непосредственно в драйвере) и с максимально возможной точностью. В реализациях исключительно на программном уровне архитектура и производительность системы непосредственно ограничивают максимально допустимую точность.
При использовании дополнительной поддержки аппаратного обеспечения для присвоения меток времени, точность может быть значительным образом повышена и может быть обеспечена ее виртуальная независимость от программного обеспечения. Для этого необходимо использование дополнительной логики, которая может быть реализована в программируемой логической интегральной схеме или специализированной для решения конкретной задачи интегральной схеме на сетевом входе.
Компания Hirschmann – один из первых производителей, реализовавших протокол PTP и оптимизировавших его использование. Компанией был разработан стек, максимально эффективно реализующий протокол, а также чип (программируемая интегральная логическая схема), который обеспечивает высокую точность проводимых замеров.
В системе, в которой несколько обычных часов объединены через Ethernet-коммутатор с функцией граничных часов, была достигнута предельная погрешность +/- 60 нс при практически полной независимости от загрузки сети и загрузки процессора. Также компанией была протестирована система, состоящая из 30 каскадно-соединенных коммутаторов, обладающих функцией поддержки т.н. прозрачных часов и были зафиксированы погрешности менее в пределах +/- 200 нс.
Компания Hirschmann Automation and Control реализовала протоколы PTP версии 1 и версии 2 в промышленных коммутаторах серии MICE, а также в серии монтируемых на стойку коммутаторов MACH100.
Протокол PTP во многих областях уже доказал эффективность своего применения. Можно быть уверенным, что он получит более широкое распространение в течение следующих лет и что многие решения при его использовании смогут быть реализованы более просто и эффективно чем при использовании других технологий.
[ Источник]
Тематики
- релейная защита
- телемеханика, телеметрия
EN
Русско-английский словарь нормативно-технической терминологии > синхронизация времени
-
49 блок
unit, block;
- (агрегат) — unit
- (ролик, тросовый) — pulley
- (такелажный, погрузочный) — pulley block
- а, д, е (бытовых приборов) — unit а, d, е
- аварийных и предупреждающих сигналов (бап) — warning/caution signal unit
- автоматики (ба, инерц. сист.) — automatic control unit
- автоматического триммирования (бат), автотриммирования — autotrim control unit
-, антенно-электронный — antenna/electronic unit
- баланса (электрического баланса, системы сп-50) — balance control unit
-, балансировки (бб) — stable platform gyro bias drift
дпя компенсации систематической составляющей собственного дрейфа гироскопов гироплатформы по трем осям. — compensator
- ввода начальных данных (пв, инерциальной системы) — control display unit (cdu)
- воздушных параметров (бвп) — air data unit
-, "врубной" — plug-in unit
- bcmb (системы cbc, вычислитепь скорости, чиспа м и высоты) — air data computer
-, вычислительно-усилительный (вуб, инерциальной системы) — computer-amplifier unit
- гиромагнитной коррекции (бгмк) — gyro/mag monitor
-, гидравлический — hydraulic unit (pack)
- датчиков угловых скоростей — rate gyro unit /group/
- демпфирующих гироскопов — rate gyro unit
- дистанционной (дискретной) коррекции (бдк) — navigation computer correction selector
задатчик, устанавливаемый на приборной доске и служащий для компенсации систематической погрешности курсовой системы или цепи счисления пути в нав. вычислитепь (нву) (рис. 69). — selector is installed on сopilot's instrument panel, and is used to compensate systematic errors оf compass system or а/с position reckoning circuit in navigation computer.
- добавочного сопротивления (для ограничения токов в цепи якоря электродвигателя.) — additional resistance unit
- заданной информации по траектории полета — flight path data storage unit (fdsu)
- задатчика скорости (приборной) — ias selector unit
- задающий (в сист. управления) — master unit
- зажигания — ignition unit
-, законченный — definite-purpose unit
- защиты двигателя (бзд) — engine protection unit
- защиты и управления (бзу) — protection and control unit
-, инерциально-навигационный (с гироплатформой) — inertial navigation unit (inu)
- искрогашения (рад.) — spark quench unit
-, исполнительный — actuating unit
- камеры сгорания — combustion section
- кислородного питания, переносной — portable oxygen unit
- кислородного питания (бкп), переносной (аварийный баллон с редуктором и манометром) — (emergency) portable /walkaround/ oxygen cylinder
- кислородного питания (бкп), стационарный — oxygen supply cylinder (unit)
- кислородного оборудования (бко состоит из укладочного блока и кислородной маски) — oxygen unit
- коммутации — switching unit
- коммутации навигационного оборудования (бкн) — navigation equipment switching unit
- коммутации шин (автомат переключения шин) — bus tie relay (unit)
-, конструктивно-законченный — definite-purpose unit
- контроля — monitor
- контроля (переносного типа "тестер") — tester
- контроля исправности (системы) — (system) integrity monitor /monitoring unit/
- контроля кренов (бкк) (сравнивает углы крена и тангажа, индицируемые на обоих пкп и измеряемые резервной курсовертикалью, и при необходимости вырабатывает сигнал отказа.) — attitude monitor (атт mntr)
- коррекции и связи (бкс, инерциальной навигационной системы) — coupler
- кресел (пассажирских) — seat unit
- кресел, двухместный — double-place seat unit
- кресел, трехместный — triple-place seat unit
-, легкосъемный (со штырьевым разъемом) — plug-and-socket quick release unit
- масляных насосов (маслоагрегат) — oil pump block
-, модульный — module
- на твердых схемах (электронный) — solid state circuitry unit (all-solid state circuitry is used in many key chassis areas.)
- наведения (бн) — guidance unit
в системе сау для управления механизмом триммерного эффекта продольного канала. — directs an aircraft with referеncе 'to selection of a flight path.
-, натяжной (для регулирования натяжения тросовой проводки) — cable tensioning pulley
-, натяжной (оттяжной, тросовой проводки) — idle pulley block
- неуправляемых ракет (подвесной) — rocket pod
- ограничения режимов (автопилота, бор) — mode limiter
- опасной высоты (автопилота,бов) — preselected radio altitude unit
- оперативной памяти (устройство) — random-access memory (ram) ram output data is transferred on the memory bus.
- (иммитации) отказов (системы сау) — failure simulator
- отключения генератора (бог) — generator cut-out unit
-, оттяжной (тросовой проводки) — idle pulley block
- очередности (очереди работы озу) — queue control block (а block that is used to regulate the sequential use of a programmer.)
- памяти (внешней) — storage unit
- памяти воздушных сигналов — air data storage unit
- передачи данных — data transmitter
-, перекидной (роликовый) — guide pulley block
- переключения потребителей (бпп) — load monitor relay (unit) (lmr)
- переключения шин (автомат) — bus tie relay unit (btr)
- перекрестных связей (бпс) — cross-coupling unit
- питания — power unit
- питания потребителей (бпп) — power unit
- пластин (аккумулятора), отрицательный — negative plate group
- пластин (аккумулятора), положительный — positive plate group
-, погрузочный (тросовой проводки с лебедкой) — (cargo) loading /handling/ pulley block
- подрыва (сро) — destructor (unit)
- подшипника, внутренний — bearing inner race and cage assembly
-, полностью собранный на транзисторах — all-transistorized unit
- полупроводниковых приборов(бпп) — semiconductor module
- постоянной памяти (устройство) — read-only memory (rom) rom output data is transferred on the memory bus.
- постоянной памяти (внешнее устройство) — permanent storage
- преобразования (системы свс) — converter
- преобразования сигналов (системы мсрп) — signal conditioning unit
- приема данных — data receiver
- приема и обработки сигналов (навигац.системы "омега") — receiver-processor unit (rpu)
-,приемо-вычислительный (системы "омега") — receiver processor unit (rpu)
-,приемо-процессорный (системы "омега") — receiver processor unit (rpu) contains the circuitry to process the received omega and vlf signals.
-, процессорно-вычислительный (пb, системы "омега") — receiver-processor unit (rpu)
- разовых команд (брк) — event signal unit
- распределения углов (бру, крена, курса, тангажа инерциальной системы) — pitch, roll and heading angular information distributor (used to transfer pitch, roll and heading angular information to respective systems.)
- растормаживания (блок тормоза) — brake retraction mechanism
- реактивных орудий (подвесной) — rocket pod
- регулирования частоты генератора (брч) — generator frequency control unit
- регулировочно-коммутационный (автопилота) — coupler
- речевой информации (ри) — voice warning unit (vwu)
- речевых команд (брк) — voice warding unit (vwu)
- (2-х) роликовый — (twin) pulley block
-,рулевой (рб,автопилота) — servo (unit)
- ручного триммирования — manual trim control unit
- связи — coupling unit, coupler
-, связи аналого-цифровой (ацбс) — analog-digital coupler
служит для преобразования входных данных в цифровой код и цифрового кода в выходные данные. — converts input data into digital code, and then digital code into output signals.
- связи, антенный (системы "омега") — antenna coupler (acu)
- связи низкой частоты доплеровского измерителя скорости и сноса — doppler lf coupler
- связи с антенной — antenna coupler unit
- связи с курсовой системой — compass system coupling unit /coupler/
- связи с радиолокационным оборудованием — radar coupling unit /coupler/
- сигнализации нарушения питания (снп) — power fail relay (unit)
- сигнализации предельных кренов (бспк для включения табло крен лев (прав) велик) — limit bank warn(ing) unit (to operate high l(r) bank annunciators)
- сигналов отказа (бсо) — failure signal unit
- сидений (кресел, двух-трехместный) — (double-, triple-place) seat unit
- скоростных гироскопов — rate gyro unit/group/
- собранный на транзисторах — transistorized unit
- согласования (автопилота) — synchronizer
- согласования (сарпп) — signal conditioning unit
- согласования (сист. высотноскоростных параметров) — synchronizer
- согласования курса (бск, сист. бскв) — heading synchronizer
- согласующих устройств (бсу, системы мсрп) — signal conditioning unit
- сопряжения антенн (системы омега) — antenna coupler unit (acu)
- специализированного питания (бсп, инерциональной системы) — power unit
- сравнения — comparator
- сравнения гировертикалей (бсг) — vertical gyro comparator, vg comparator
- сравнения сигналов компасов — compass signal comparator
- страниц — page block
а normal blank page within a page block (e.g. the back of a fold-out page) shall be identified as follows. pages 823/824 (ata-1oo, 1-1-1, p.2)
- страниц раздела технология обслуживания, включает: обслуживание (стр. 301-400) демонтаж/монтаж (стр. 401-500) регулировка/испытание (стр. 501-600) осмотр/проверка (стр. 601-700) очистка/окраска (стр. 701-800) 1 текущий ремонт (стр. 801-900) — maintenance practices page number blocks are as follows: servicing (pages 301-400) removal/installation (401-500) adjustment/test (501-600) inspection/check (601-700) cleaning/painting (701-800) approved repairs (801-900)
- страниц, стандартный — standard page number block
standard page number blocks to be used for the maintenance manual are as follows:
(напр. описание и работа стр. 1-1oo — description and operation, pages 1 to 100
отыскание неисправности стр. 101-200 и т.д.) — trouble shooting, pages 101-200
maintenance practices, pages 201-300 servicing pages 301-400 (ata-1oo, 2-1-1 p.2)
- суммарного измерения (топливомера (бси) — fuel quantity totalizer
- суммарной сигнализации (топливомера) (бсс) — total fuel indication unit
- (-) схема — block diagram
блок-схемы используются в описательной части руководств для общего ознакомления с работой и соединениями сложной эпектрической или электронной системы (рис. 95). — the block diagram shall be used in the descriptive portion of the manuals to simplify complex circuits to understand the system function and operation.
- (-) схема (подрисуночная надпись, напр. "блоксхема доплеровекого измерителя) — block schematic туре 72 doppler - block schematic
- топливомера (электронный) — fuel quantity unit
- тормоза (колеса) — brake unit
- траекторного управления (бту системы сту) — flight director unit, fd unit
- трансформаторно-выпрямительный — transformer-rectifier unit (tr, tru, t/r;
-, укладочный (для кислородной маски и шланга) — (oxygen mask) container
-, унифицированный (уб для pc) — rocket pod (rkt pod)
- управления — control unit
- управления и индикации (нав. сист. "омега") — control display unit (cdu)
- управления и индикации расстояния до пункта назначения и отклонения от курса — along/across track display controller
- управления сигнализацией — warning system control unit
- усилителя сервопривода крена (бус крена) — aileron servo amplifier (unit)
- усилителя сервопривода тангажа (бус тангажа) — elevator servo amplifier (unit)
- усилителей сервоприводов (бус, автопилота) — servo amplifier unit, autopilot amplifier unit
provides power outputs to drive the control surface servos.
-, усилительный (автопилота) — autopilot amplifier
-, усилительный, крена (тангажа, рыскания) — roll (pitch, yaw) channel amplifier unit
- формирования (сигналов) и контроля — signal conditioning and monitor unit
бфк, формирует сигналы h, m, vпр) и вырабат. сигналы отказа датчиков
-, функционально-законченный — definite-purpose unit
- центровки самолета (сист. топливомера) (бцс) — fuel equalizer
- цилиндров — cylinder block
соединение нескольких цилиндров в общем конструктивном узле
- цилиндров (тормоза колеса) (рис. 32) — cylinder block
силовой узел тормоза, воздействующий при подаче давления на нажимной диск, сжимающий тормозные (вращающиеся и неподвижные) диски, — the two sets of four piston and cylinder assemblies are incorporated in the torque plate of the cylinder block to provide fully dupplicated and independent application of brake.
- чередования фаз (бчф) — phase-sequence (relay) unit
- электроники (бэ, инерц. сист.) — electronic unitРусско-английский сборник авиационно-технических терминов > блок
-
50 передача
1) General subject: assignation, assignment, broadcast, cession, commitment, committal, communication (мыслей, сведений и т. п.), conveyance (имущества), conveyance (новостей, известий и т.п.), delivery, devolution (власти, обязанностей и т. п.), disposal, drive, driving, feeding (мяча), gear, gear unit, handover (полномочий, дел, собственности и др.), imparting, package, program, programme, referral (дела и т. п.), rendering, reproduction, speed (в сложных словах), submission, transference, transference (права на товарный знак), transfering, transfusion (чувств), transmit, disposition, transfer, parcel (в тюрьме, в больнице)3) Naval: speeder, transmittance4) Medicine: carry-over (напр. вируса), sending (сигнала)5) Sports: change over, handoff (в баскетболе), handoff (мяча партнёру - футбол)6) Military: broadcast brigade, delegation (прав, обязанностей, полномочий), gear, handoff, retransfer, take-over (обороняемых позиций при смене), transmittal (сообщения), turnover7) Engineering: block transfer, block-by-block transfer, broadcast (вещательная), broadcasting (вещание), communication (данных), communications, dispatch, dissemination (напр. сигналов), exchange, gear (механизм передачи движения), gear fast/run slow, gear speed, gearing (механизм передачи движения), messaging (сообщений), pass (маркёра), passing (маркёра), propagation (сигнала), relay, relaying (сигнала), rendition (воспроизведение), shafting, ship (пересылка данных), shipping (пересылка данных), transfer (технологии), transition, transmission8) Agriculture: carry-over (болезни)9) Rare: rendition10) Construction: conveyance (звука, тепла), conveying (звука, тепла), transfer (напр, документов)11) Mathematics: emission (информации)12) Railway term: countershaft, driving gear, ratio (зубчатых колёс), signaling (сигналов), transfer (напр. вагонов с дороги на дорогу)13) Law: assignation (права или собственности), conveyance (имущества), delegation, disposal (функции), gift over, relegation, removal, transfer (of part of territory) (части территории), transport (напр прав), utterance, (прав или правового титула) abalienation (Black's Law Dictionary - Civil law. The transfer of an interest in or title to property; alienation.)14) Economy: circulation, delegation (полномочий), legal delivery, spin-off, split-off, tradition, transfer (права, имущества)15) Accounting: commitment (напр. законопроекта в парламентскую комиссию), surrender18) Mining: disposal (материалов, ценностей)19) Diplomatic term: cession (прав, имущества), devolution (обязанностей, функций и т.п.), handover (документа, территории и т.п.), transfer (имущества, права и т.п.), transfer (вооружения, права на что-л. и т.п.)20) Cinema: carriage21) Forestry: pickup22) Metallurgy: convey23) Polygraphy: imparting (информации), rendering (изображения), transferal (напр. изображения), transference (напр. изображения)24) Politics: (из одних рук в другие) re-hatting25) Psychology: propagation (импульсов)26) Telecommunications: (факсимильная) projection, reconnaissance, synchronization27) Electronics: linkage, transmitting, working28) Information technology: edit-directed transmission, extract, transfer, load, handing on, pass, passing, uploading29) Oil: tmn, turning over, transduction, transmittal31) Astronautics: transferring, writing32) Cartography: rendition (изображения)33) Banking: negotiation34) Mechanic engineering: driving rope36) Advertising: broadcast (радио или телевизионная), broadcasting, feed, pick-up (программы), translation37) Patents: release (права, имущества)38) Business: handing over, handing-over, making over, passing on39) American English: pogey (посылка с продуктами для заключенного)40) Network technologies: forwarding41) Polymers: train (зубчатая)42) Automation: conveying, pass of gearing, transmission unit, transposition (данных УП из ЭВМ в УЧПУ)43) Robots: coupling, passing (напр. деталей в ГПС), transmission (данных)44) Arms production: transformation45) leg.N.P. rotation, traditio, tradition (e.g., of a thing sold), transfer (e.g., of a right, title, or property)46) General subject: gear (на которой движется машина), speed (4-я передача, коробки передач), transmission (крутящего момента)47) Aviation medicine: conductance (активная)48) Makarov: assignment (прав и т.п.), circulation (информации), conductance, delivering, disposition (of) (кому-л.), donation, emission (вид излучения), exchange of messages (передаваемая информация, сообщения), gear (в механике), gear ratio, move (данных), movement (данных), moving, passage, projection (мысли, образа и т.п.), signalling (особ. метод передачи в линию; передаваемая информация, сообщения), traffic of messages (передаваемая информация, сообщения), transfer (данных), transfer (информации, излучения), transfer (напр. изображения), transfer (перенос изделия на агрегатных станках), transferal, transferring (напр. изображения), transmission (в механике), transmission (вид излучения), transmission (информации, излучения), transmission (механизм передачи движения), transmission (напр. информации), transmission line49) Bicycle: gear (top gear - высокая (быстрая) передача, low gear - низкая (медленная) передача)50) Security: propagation (напр. полномочий), transmission (сигналов)51) SAP.tech. passed on52) SAP.fin. book transfer53) oil&gas: loan55) Combustion gas turbines: transmission (напр., тепла)56) Cement: driving mechanism -
51 управление аварийными сигналами
управление аварийными сигналами
-
[Интент]
Переход от аналоговых систем к цифровым привел к широкому, иногда бесконтрольному использованию аварийных сигналов. Текущая программа снижения количества нежелательных аварийных сигналов, контроля, определения приоритетности и адекватного реагирования на такие сигналы будет способствовать надежной и эффективной работе предприятия.Если технология хороша, то, казалось бы, чем шире она применяется, тем лучше. Разве не так? Как раз нет. Больше не всегда означает лучше. Наступление эпохи микропроцессоров и широкое распространение современных распределенных систем управления (DCS) упростило подачу сигналов тревоги при любом сбое технологического процесса, поскольку затраты на это невелики или равны нулю. В результате в настоящее время на большинстве предприятий имеются системы, подающие ежедневно огромное количество аварийных сигналов и уведомлений, что мешает работе, а иногда приводит к катастрофическим ситуациям.
„Всем известно, насколько важной является система управления аварийными сигналами. Но, несмотря на это, на производстве такие системы управления внедряются достаточно редко", - отмечает Тодд Стауффер, руководитель отдела маркетинга PCS7 в компании Siemens Energy & Automation. Однако события последних лет, среди которых взрыв на нефтеперегонном заводе BP в Техасе в марте 2005 г., в результате которого погибло 15 и получило травмы 170 человек, могут изменить отношение к данной проблеме. В отчете об этом событии говорится, что аварийные сигналы не всегда были технически обоснованы.
Широкое распространение компьютеризированного оборудования и распределенных систем управления сделало более простым и быстрым формирование аварийных сигналов. Согласно новым принципам аварийные сигналы следует формировать только тогда, когда необходимы ответные действия оператора. (С разрешения Siemens Energy & Automation)
Этот и другие подобные инциденты побудили специалистов многих предприятий пересмотреть программы управления аварийными сигналами. Специалисты пытаются найти причины непомерного роста числа аварийных сигналов, изучить и применить передовой опыт и содействовать разработке стандартов. Все это подталкивает многие компании к оценке и внедрению эталонных стандартов, таких, например, как Publication 191 Ассоциации пользователей средств разработки и материалов (EEMUA) „Системы аварийной сигнализации: Руководство по разработке, управлению и поставке", которую многие называют фактическим стандартом систем управления аварийными сигналами. Тим Дональдсон, директор по маркетингу компании Iconics, отмечает: „Распределение и частота/колебания аварийных сигналов, взаимная корреляция, время реакции и изменения в действиях оператора в течение определенного интервала времени являются основными показателями отчетов, которые входят в стандарт EEMUA и обеспечивают полезную информацию для улучшения работы предприятия”. Помимо этого как конечные пользователи, так и поставщики поддерживают развитие таких стандартов, как SP-18.02 ISA «Управление системами аварийной сигнализации для обрабатывающих отраслей промышленности». (см. сопроводительный раздел „Стандарты, эталоны, передовой опыт" для получения более подробных сведений).
Предполагается, что одной из причин взрыва на нефтеперегонном заводе BP в Техасе в 2005 г., в результате которого погибло 15 и получило ранения 170 человек, а также был нанесен значительный ущерб имуществу, стала неэффективная система аварийных сигналов.(Источник: Комиссия по химической безопасности и расследованию аварий США)
На большинстве предприятий системы аварийной сигнализации очень часто имеют слишком большое количество аварийных сигналов. Это в высшей степени нецелесообразно. Показатели EEMUA являются эталонными. Они содержатся в Publication 191 (1999), „Системы аварийной сигнализации: Руководство по разработке, управлению и поставке".
Начало работы
Наиболее важным представляется вопрос: почему так велико количество аварийных сигналов? Стауффер объясняет это следующим образом: „В эпоху аналоговых систем аварийные сигналы реализовывались аппаратно. Они должны были соответствующим образом разрабатываться и устанавливаться. Каждый аварийный сигнал имел реальную стоимость - примерно 1000 долл. США. Поэтому они выполнялись тщательно. С развитием современных DCS аварийные сигналы практически ничего не стоят, в связи с чем на предприятиях стремятся устанавливать все возможные сигналы".
Характеристики «хорошего» аварийного сообщения
В число базовых требований к аварийному сообщению, включенных в аттестационный документ EEMUA, входит ясное, непротиворечивое представление информации. На каждом экране дисплея:
• Должно быть четко определено возникшее состояние;
• Следует использовать терминологию, понятную для оператора;
• Должна применяться непротиворечивая система сокращений, основанная на стандартном словаре сокращений для данной отрасли производства;
• Следует использовать согласованную структуру сообщения;
• Система не должна строиться только на основе теговых обозначений и номеров;
• Следует проверить удобство работы на реальном производстве.
Информация из Publication 191 (1999) EEMUA „Системы аварийной сигнализации: Руководство по разработке, управлению и поставке".
Качественная система управления аварийными сигналами должна опираться на руководящий документ. В стандарте ISA SP-18.02 «Управление системами аварийной сигнализации для обрабатывающих отраслей промышленности», предложен целостный подход, основанный на модели жизненного цикла, которая включает в себя определяющие принципы, обучение, контроль и аудит.
Именно поэтому операторы сегодня часто сталкиваются с проблемой резкого роста аварийных сигналов. В соответствии с рекомендациями Publication 191 EEMUA средняя частота аварийных сигналов не должна превышать одного сигнала за 10 минут, или не более 144 сигналов в день. В большинстве отраслей промышленности показатели значительно выше и находятся в диапазоне 5-9 сигналов за 10 минут (см. таблицу Эталонные показатели для аварийных сигналов). Дэвид Гэртнер, руководитель служб управления аварийными сигналами в компании Invensys Process Systems, вспоминает, что при запуске производственной установки пяти операторам за полгода поступило 5 миллионов сигналов тревоги. „От одного из устройств было получено 550 000 аварийных сигналов. Устройство работает на протяжении многих месяцев, и до сих пор никто не решился отключить его”.
Практика прошлых лет заключалась в том, чтобы использовать любые аварийные сигналы независимо от того - нужны они или нет. Однако в последнее время при конфигурировании систем аварийных сигналов исходят из необходимости ответных действий со стороны оператора. Этот принцип, который отражает фундаментальные изменения в разработке систем и взаимодействии операторов, стал основой проекта стандарта SP18 ISA. В этом документе дается следующее определение аварийного сигнала: „звуковой и/или визуальный способ привлечения внимания, указывающий оператору на неисправность оборудования, отклонения в технологическом процессе или аномальные условия эксплуатации, которые требуют реагирования”. При такой практике сигнал конфигурируется только в том случае, когда на него необходим ответ оператора.
Адекватная реакция
Особенно важно учитывать следующую рекомендацию: „Не следует ничего предпринимать в отношении событий, для которых нет измерительного инструмента (обычно программного)”.Высказывания Ника Сэнд-за, сопредседателя комитета по разработке стандартов для систем управления аварийными сигналами SP-18.00.02 Общества ISA и менеджера технологий управления процессами химического производства DuPont, подчеркивают необходимость контроля: „Система контроля должна сообщать - в каком состоянии находятся аварийные сигналы. По каким аварийным сигналам проводится техническое обслуживание? Сколько сигналов имеет самый высокий приоритет? Какие из них относятся к системе безопасности? Она также должна сообщать об эффективности работы системы. Соответствует ли ее работа вашим целям и основополагающим принципам?"
Кейт Джоунз, старший менеджер по системам визуализации в Wonderware, добавляет: „Во многих отраслях промышленности, например в фармацевтике и в пищевой промышленности, уже сегодня требуется ведение баз данных по материалам и ингредиентам. Эта информация может также оказаться полезной при анализе аварийных сигналов. Мы можем установить комплект оборудования, работающего в реальном времени. Оно помогает определить место, где возникла проблема, с которой связан аварийный сигнал. Например, можно создать простые гистограммы частот аварийных сигналов. Можно сформировать отчеты об аварийных сигналах в соответствии с разными уровнями системы контроля, которая предоставляет сведения как для менеджеров, так и для исполнителей”.
Представитель компании Invensys Гэртнер утверждает, что двумя основными элементами каждой программы управления аварийными сигналами должны быть: „хороший аналитический инструмент, с помощью которого можно определить устройства, подающие наибольшее количество аварийных сигналов, и эффективный технологический процесс, позволяющий объединить усилия персонала и технические средства для устранения неисправностей. Инструментарий помогает выявить источник проблемы. С его помощью можно определить наиболее частые сигналы, а также ложные и отвлекающие сигналы. Таким образом, мы можем выяснить, где и когда возникают аварийные сигналы, можем провести анализ основных причин и выяснить, почему происходит резкое увеличение сигналов, а также установить для них новые приоритеты. На многих предприятиях высокий приоритет установлен для всех аварийных сигналов. Это неприемлемое решение. Наиболее разумным способом распределения приоритетности является следующий: 5 % аварийных сигналов имеют приоритет № 1, 15% приоритет № 2, и 80% приоритет № 3. В этом случае оператор может отреагировать на те сигналы, которые действительно важны”.
И, тем не менее, Марк МакТэвиш, руководитель группы решений в области управления аварийными сигналами и международных курсов обучения в компании Matrikon, отмечает: „Необходимо помнить, что программное обеспечение - это всего лишь инструмент, оно само по себе не является решением. Аварийные сигналы должны представлять собой исключительные случаи, которые указывают на события, выходящие за приемлемые рамки. Удачные программы управления аварийными сигналами позволяют добиться внедрения на производстве именно такого подхода. Они помогают инженерам изо дня в день управлять своими установками, обеспечивая надежный контроль качества и повышение производительности за счет снижения незапланированных простоев”.
Система, нацеленная на оператора
Тем не менее, даже наличия хорошей системы сигнализации и механизма контроля и анализа ее функционирования еще недостаточно. Необходимо следовать основополагающим принципам, руководящему документу, который должен стать фундаментом для всей системы аварийной сигнализации в целом, подчеркивает Сэндз, сопредседатель ISA SP18. При разработке стандарта „основное внимание мы уделяем не только рационализации аварийных сигналов, - говорит он, - но и жизненному циклу систем управления аварийными сигналами в целом, включая обучение, внесение изменений, совершенствование и периодический контроль на производственном участке. Мы стремимся использовать целостный подход к системе управления аварийными сигналами, построенной в соответствии с ISA 84.00.01, Функциональная безопасность: Системы безопасности с измерительной аппаратурой для сектора обрабатывающей промышленности». (см. диаграмму Модель жизненного цикла системы управления аварийными сигналами)”.
«В данном подходе учитывается участие оператора. Многие недооценивают роль оператора,- отмечает МакТэвиш из Matrikon. - Система управления аварийными сигналами строится вокруг оператора. Инженерам трудно понять проблемы оператора, если они не побывают на его месте и не получат опыт управления аварийными сигналами. Они считают, что знают потребности оператора, но зачастую оказывается, что это не так”.
Удобное отображение информации с помощью человеко-машинного интерфейса является наиболее существенным аспектом системы управления аварийными сигналами. Джонс из Wonderware говорит: „Аварийные сигналы перед поступлением к оператору должны быть отфильтрованы так, чтобы до оператора дошли нужные сообщения. Программное обеспечение предоставляет инструментарий для удобной конфигурации этих параметров, но также важны согласованность и подтверждение ответных действий”.
Аварийный сигнал должен сообщать о том, что необходимо сделать. Например, как отмечает Стауффер из Siemens: „Когда специалист по автоматизации настраивает конфигурацию системы, он может задать обозначение для физического устройства в соответствии с системой идентификационных или контурных тегов ISA. При этом обозначение аварийного сигнала может выглядеть как LIC-120. Но оператору информацию представляют в другом виде. Для него это 'регулятор уровня для резервуара XYZ'. Если в сообщении оператору указываются неверные сведения, то могут возникнуть проблемы. Оператор, а не специалист по автоматизации является адресатом. Он - единственный, кто реагирует на сигналы. Сообщение должно быть сразу же абсолютно понятным для него!"
Эдди Хабиби, основатель и главный исполнительный директор PAS, отмечает: „Эффективность деятельности оператора, которая существенно влияет на надежность и рентабельность предприятия, выходит за рамки совершенствования системы управления аварийными сигналами. Инвестиции в операторов являются такими же важными, как инвестиции в современные системы управления технологическим процессом. Нельзя добиться эффективности работы операторов без учета человеческого фактора. Компетентный оператор хорошо знает технологический процесс, имеет прекрасные навыки общения и обращения с людьми и всегда находится в состоянии готовности в отношении всех событий системы аварийных сигналов”. „До возникновения DCS, -продолжает он, - перед оператором находилась схема технологического процесса, на которой были указаны все трубопроводы и измерительное оборудование. С переходом на управление с помощью ЭВМ сотни схем трубопроводов и контрольно-измерительных приборов были занесены в компьютерные системы. При этом не подумали об интерфейсе оператора. Когда произошел переход от аналоговых систем и физических схем панели управления к цифровым системам с экранными интерфейсами, оператор утратил целостную картину происходящего”.
«Оператору также требуется иметь необходимое образование в области технологических процессов, - подчеркивает Хабиби. - Мы часто недооцениваем роль обучения. Каковы принципы работы насоса или компрессора? Летчик гражданской авиации проходит бесчисленные часы подготовки. Он должен быть достаточно подготовленным перед тем, как ему разрешат взять на себя ответственность за многие жизни. В руках оператора химического производства возможно лежит не меньшее, если не большее количество жизней, но его подготовка обычно ограничивается двухмесячными курсами, а потом он учится на рабочем месте. Необходимо больше внимания уделять повышению квалификации операторов производства”.
Рентабельность
Эффективная система управления аварийными сигналами стоит времени и денег. Однако и неэффективная система также стоит денег и времени, но приводит к снижению производительности и повышению риска для человеческой жизни. Хотя создание новой программы управления аварийными сигналами или пересмотр и реконструкция старой может обескуражить кого угодно, существует масса информации по способам реализации и достижения целей системы управления аварийными сигналами.
Наиболее важным является именно определение цели и способов ее достижения. МакТэвиш говорит, что система должна выдавать своевременные аварийные сигналы, которые не дублируют друг друга, адекватно отражают ситуацию, помогают оператору диагностировать проблему и определять эффективное направление действий. „Целью является поддержание производства в безопасном, надежном рабочем состоянии, которое позволяет выпускать качественный продукт. В конечном итоге целью является финансовая прибыль. Если на предприятии не удается достичь этих целей, то его существование находится под вопросом.
Управление аварийными сигналами - это процесс, а не схема, - подводит итог Гэртнер из Invensys. - Это то же самое, что и производственная безопасность. Это - постоянный процесс, он никогда не заканчивается. Мы уже осознали высокую стоимость низкой эффективности и руководители предприятий больше не хотят за нее расплачиваться”.
Автор: Джини Катцель, Control Engineering
[ http://controlengrussia.com/artykul/article/hmi-upravlenie-avariinymi-signalami/]Тематики
EN
Русско-английский словарь нормативно-технической терминологии > управление аварийными сигналами
-
52 управление электропитанием
управление электропитанием
-
[Интент]
Управление электропитанием ЦОД
Автор: Жилкина Наталья
Опубликовано 23 апреля 2009 года
Источники бесперебойного питания, функционирующие в ЦОД, составляют важный элемент общей системы его энергообеспечения. Вписываясь в контур управления ЦОД, система мониторинга и управления ИБП становится ядром для реализации эксплуатационных функций.
Три задачи
Системы мониторинга, диагностики и управления питанием нагрузки решают три основные задачи: позволяют ИБП выполнять свои функции, оповещать персонал о происходящих с ними событиях и посылать команды для автоматического завершения работы защищаемого устройства.
Мониторинг параметров ИБП предполагает отображение и протоколирование состояния устройства и всех событий, связанных с его изменением. Диагностика реализуется функциями самотестирования системы. Управляющие же функции предполагают активное вмешательство в логику работы устройства.Многие специалисты этого рынка, отмечая важность процедуры мониторинга, считают, что управление должно быть сведено к минимуму. «Функция управления ИБП тоже нужна, но скорее факультативно, — говорит Сергей Ермаков, технический директор компании Inelt и эксперт в области систем Chloride. — Я глубоко убежден, что решения об активном управляющем вмешательстве в работу систем защиты электропитания ответственной нагрузки должен принимать человек, а не автоматизированная система. Завершение работы современных мощных серверов, на которых функционируют ответственные приложения, — это, как правило, весьма длительный процесс. ИБП зачастую не способны обеспечивать необходимое для него время, не говоря уж о времени запуска какого-то сервиса». Функция же мониторинга позволяет предотвратить наступление нежелательного события — либо, если таковое произошло, проанализировать его причины, опираясь не на слова, а на запротоколированные данные, хранящиеся в памяти адаптера или файлах на рабочей станции мониторинга.
Эту точку зрения поддерживает и Алексей Сарыгин, технический директор компании Radius Group: «Дистанционное управление мощных ИБП — это вопрос, к которому надо подходить чрезвычайно аккуратно. Если функции дистанционного мониторинга и диспетчеризации необходимы, то практика предоставления доступа персоналу к функциям дистанционного управления представляется радикально неверной. Доступность модулей управления извне потенциально несет в себе риск нарушения безопасности и категорически снижает надежность системы. Если существует физическая возможность дистанционно воздействовать на ИБП, на его параметры, отключение, снятие нагрузки, закрытие выходных тиристорных ключей или блокирование цепи байпаса, то это чревато потерей питания всего ЦОД».
Практически на всех трехфазных ИБП предусмотрена кнопка E.P.O. (Emergency Power Off), дублер которой может быть выведен на пульт управления диспетчерской. Она обеспечивает аварийное дистанционное отключение блоков ИБП при наступлении аварийных событий. Это, пожалуй, единственная возможность обесточить нагрузку, питаемую от трехфазного аппарата, но реализуется она в исключительных случаях.
Что же касается диагностики электропитания, то, как отмечает Юрий Копылов, технический директор московского офиса корпорации Eaton, в последнее время характерной тенденцией в управляющем программном обеспечении стал отказ от предоставления функций удаленного тестирования батарей даже системному администратору.
— Адекватно сравнивать состояние батарей необходимо под нагрузкой, — говорит он, — сам тест запускать не чаще чем раз в два дня, а разряжать батареи надо при одном и том же токе и уровне нагрузки. К тому же процесс заряда — довольно долгий. Все это не идет батареям на пользу.Средства мониторинга
Производители ИБП предоставляют, как правило, сразу несколько средств мониторинга и в некоторых случаях даже управления ИБП — все они основаны на трех основных методах.
В первом случае устройство подключается напрямую через интерфейс RS-232 (Com-порт) к консоли администратора. Дальность такого подключения не превышает 15 метров, но может быть увеличена с помощью конверторов RS-232/485 и RS-485/232 на концах провода, связывающего ИБП с консолью администратора. Такой способ обеспечивает низкую скорость обмена информацией и пригоден лишь для топологии «точка — точка».
Второй способ предполагает использование SNMP-адаптера — встроенной или внешней интерфейсной карты, позволяющей из любой точки локальной сети получить информацию об основных параметрах ИБП. В принципе, для доступа к ИБП через SNMP достаточно веб-браузера. Однако для большего комфорта производители оснащают свои системы более развитым графическим интерфейсом, обеспечивающим функции мониторинга и корректного завершения работы. На базе SNMP-протокола функционируют все основные системы мониторинга и управления ИБП, поставляемые штатно или опционально вместе с ИБП.
Стандартные SNMP-адаптеры поддерживают подключение нескольких аналоговых или пороговых устройств — датчик температуры, движения, открытия двери и проч. Интеграция таких устройств в общую систему мониторинга крупного объекта (например, дата-центра) позволяет охватить огромное количество точек наблюдения и отразить эту информацию на экране диспетчера.
Большое удобство предоставляет метод эксплуатационного удаленного контроля T.SERVICE, позволяющий отследить работу оборудования посредством телефонной линии (через модем GSM) или через Интернет (с помощью интерфейса Net Vision путем рассылки e-mail на электронный адрес потребителя). T.SERVICE обеспечивает диагностирование оборудования в режиме реального времени в течение 24 часов в сутки 365 дней в году. ИБП автоматически отправляет в центр технического обслуживания регулярные отчеты или отчеты при обнаружении неисправности. В зависимости от контролируемых параметров могут отправляться уведомления о неправильной эксплуатации (с пользователем связывается опытный специалист и рекомендует выполнить простые операции для предотвращения ухудшения рабочих характеристик оборудования) или о наличии отказа (пользователь информируется о состоянии устройства, а на место установки немедленно отправляется технический специалист).Профессиональное мнение
Наталья Маркина, коммерческий директор представительства компании SOCOMEC
Управляющее ПО фирмы SOCOMEC легко интегрируется в общий контур управления инженерной инфраструктурой ЦОД посредством разнообразных интерфейсов передачи данных ИБП. Установленное в аппаратной или ЦОД оборудование SOCOMEC может дистанционно обмениваться информацией о своих рабочих параметрах с системами централизованного управления и компьютерными сетями посредством сухих контактов, последовательных портов RS232, RS422, RS485, а также через интерфейс MODBUS TCP и GSS.
Интерфейс GSS предназначен для коммуникации с генераторными установками и включает в себя 4 входа (внешние контакты) и 1 выход (60 В). Это позволяет программировать особые процедуры управления, Global Supply System, которые обеспечивают полную совместимость ИБП с генераторными установками.
У компании Socomec имеется широкий выбор интерфейсов и коммуникационного программного обеспечения для установки диалога между ИБП и удаленными системами мониторинга промышленного и компьютерного оборудования. Такие опции связи, как панель дистанционного управления, интерфейс ADC (реконфигурируемые сухие контакты), обеспечивающий ввод и вывод данных при помощи сигналов сухих контактов, интерфейсы последовательной передачи данных RS232, RS422, RS485 по протоколам JBUS/MODBUS, PROFIBUS или DEVICENET, MODBUS TCP (JBUS/MODBUS-туннелирование), интерфейс NET VISION для локальной сети Ethernet, программное обеспечение TOP VISION для выполнения мониторинга с помощью рабочей станции Windows XP PRO — все это позволяет контролировать работу ИБП удобным для пользователя способом.
Весь контроль управления ИБП, ДГУ, контроль окружающей среды сводится в единый диспетчерский пункт посредством протоколов JBUS/MODBUS.
Индустриальный подход
Третий метод основан на использовании высокоскоростной индустриальной интерфейсной шины: CANBus, JBus, MODBus, PROFIBus и проч. Некоторые модели ИБП поддерживают разновидность универсального smart-слота для установки как карточек SNMP, так и интерфейсной шины. Система мониторинга на базе индустриальной шины может быть интегрирована в уже существующую промышленную SCADA-систему контроля и получения данных либо создана как заказное решение на базе многофункциональных стандартных контроллеров с выходом на шину. Промышленная шина через шлюзы передает информацию на удаленный диспетчерский пункт или в систему управления зданием (Building Management System, BMS). В эту систему могут быть интегрированы и контроллеры, управляющие ИБП.
Универсальные SCADA-системы поддерживают датчики и контроллеры широкого перечня производителей, но они недешевы и к тому же неудобны для внесения изменений. Но если подобная система уже функционирует на объекте, то интеграция в нее дополнительных ИБП не представляет труда.
Сергей Ермаков, технический директор компании Inelt, считает, что применение универсальных систем управления на базе промышленных контроллеров нецелесообразно, если используется для мониторинга только ИБП и ДГУ. Один из практичных подходов — создание заказной системы, с удобной для заказчика графической оболочкой и необходимым уровнем детализации — от карты местности до поэтажного плана и погружения в мнемосхему компонентов ИБП.
— ИБП может передавать одинаковое количество информации о своем состоянии и по прямому соединению, и по SNMP, и по Bus-шине, — говорит Сергей Ермаков. — Применение того или иного метода зависит от конкретной задачи и бюджета. Создав первоначально систему UPS Look для мониторинга ИБП, мы интегрировали в нее систему мониторинга ДГУ на основе SNMP-протокола, после чего по желанию одного из заказчиков конвертировали эту систему на промышленную шину Jbus. Новое ПО JSLook для мониторинга неограниченного количества ИБП и ДГУ по протоколу JBus является полнофункциональным средством мониторинга всей системы электроснабжения объекта.Профессиональное мение
Денис Андреев, руководитель департамента ИБП компании Landata
Практически все ИБП Eaton позволяют использовать коммуникационную Web-SNMP плату Connect UPS и датчик EMP (Environmental Monitoring Probe). Такой комплект позволяет в числе прочего осуществлять мониторинг температуры, влажности и состояния пары «сухих» контактов, к которым можно подключить внешние датчики.
Решение Eaton Environmental Rack Monitor представляет собой аналог такой связки, но с существенно более широким функционалом. Внешне эта система мониторинга температуры, влажности и состояния «сухих» контактов выполнена в виде компактного устройства, которое занимает минимум места в шкафу или в помещении.
Благодаря наличию у Eaton Environmental Rack Monitor (ERM) двух выходов датчики температуры или влажности можно разместить в разных точках стойки или помещения. Поскольку каждый из двух датчиков имеет еще по два сухих контакта, с них дополнительно можно принимать сигналы от датчиков задымления, утечки и проч. В центре обработки данных такая недорогая система ERM, состоящая из неограниченного количества датчиков, может транслировать информацию по протоколу SNMP в HTML-страницу и позволяет, не приобретая специального ПО, получить сводную таблицу измеряемых величин через веб-браузер.
Проблему дефицита пространства и высокой плотности размещения оборудования в серверных и ЦОД решают системы распределения питания линейки Eaton eDPU, которые можно установить как внутри стойки, так и на группу стоек.
Все модели этой линейки представляют четыре семейства: системы базового исполнения, системы с индикацией потребляемого тока, с мониторингом (локальным и удаленным, по сети) и управляемые, с возможностью мониторинга и управления электропитанием вплоть до каждой розетки. С помощью этих устройств можно компактным способом увеличить количество розеток в одной стойке, обеспечить контроль уровня тока и напряжения критичной нагрузки.
Контроль уровня потребляемой мощности может осуществляться с высокой степенью детализации, вплоть до сервера, подключенного к конкретной розетке. Это позволяет выяснить, какой сервер перегревается, где вышел из строя вентилятор, блок питания и т. д. Программным образом можно запустить сервер, подключенный к розетке ePDU. Интеграция системы контроля ePDU в платформу управления Eaton находится в процессе реализации.Требование объекта
Как поясняет Олег Письменский, в критичных объектах, таких как ЦОД, можно условно выделить две области контроля и управления. Первая, Grey Space, — это собственно здание и соответствующая система его энергообеспечения и энергораспределения. Вторая, White Space, — непосредственно машинный зал с его системами.
Выбор системы управления энергообеспечением ЦОД определяется типом объекта, требуемым функционалом системы управления и отведенным на эти цели бюджетом. В большинстве случаев кратковременная задержка между наступлением события и получением информации о нем системой мониторинга по SNMP-протоколу допустима. Тем не менее в целом ряде случаев, если характеристики объекта подразумевают непрерывность его функционирования, объект является комплексным и содержит большое количество элементов, требующих контроля и управления в реальном времени, ни одна стандартная система SNMP-мониторинга не обеспечит требуемого функционала. Для таких объектов применяют системы управления real-time, построенные на базе программно-аппаратных комплексов сбора данных, в том числе c функциями Softlogic.
Системы диспетчеризации и управления крупными объектами реализуются SCADA-системами, широкий перечень которых сегодня присутствует на рынке; представлены они и в портфеле решений Schneider Electric. Тип SCADA-системы зависит от класса и размера объекта, от количества его элементов, требующих контроля и управления, от уровня надежности. Частный вид реализации SCADA — это BMS-система(Building Management System).
«Дата-центры с объемом потребляемой мощности до 1,5 МВт и уровнем надежности Tier I, II и, с оговорками, даже Tier III, могут обслуживаться без дополнительной SCADA-системы, — говорит Олег Письменский. — На таких объектах целесообразно применять ISX Central — программно-аппаратный комплекс, использующий SNMP. Если же категория и мощность однозначно предполагают непрерывность управления, в таких случаях оправданна комбинация SNMP- и SCADA-системы. Например, для машинного зала (White Space) применяется ISX Central с возможными расширениями как Change & Capacity Manager, в комбинации со SCADA-системой, управляющей непосредственно объектом (Grey Space)».Профессиональное мнение
Олег Письменский, директор департамента консалтинга APC by Schneider Electric в России и СНГ
Подход APC by Schneider Electric к реализации полномасштабного полноуправляемого и надежного ЦОД изначально был основан на базисных принципах управления ИТ-инфраструктурой в рамках концепции ITIL/ITSM. И история развития системы управления инфраструктурой ЦОД ISX Manager, которая затем интегрировалась с программно-аппаратным комплексом NetBotz и трансформировалась в портал диспетчеризации ISX Central, — лучшее тому доказательство.
Первым итогом поэтапного приближения к намеченной цели стало наращивание функций контроля параметров энергообеспечения. Затем в этот контур подключилась система управления кондиционированием, система контроля параметров окружающей среды. Очередным шагом стало измерение скорости воздуха, влажности, пыли, радиации, интеграция сигналов от камер аудио- и видеонаблюдения, системы управления блоками розеток, завершения работы сервера и т. д.
Эта система не может и не должна отвечать абсолютно всем принципам ITSM, потому что не все они касаются существа поставленной задачи. Но как только в отношении политик и некоторых тактик управления емкостью и изменениями в ЦОД потребовался соответствующий инструментарий — это нашло отражение в расширении функционала ISX Central, который в настоящее время реализуют ПО APC by Schneider Electric Capacity Manager и APC by Schneider Electric Change Manager. С появлением этих двух решений, интегрированных в систему управления реальным объектом, АРС предоставляет возможность службе эксплуатации оптимально планировать изменения количественного и качественного состава оборудования машинного зала — как на ежедневном оперативном уровне, так и на уровне стратегических задач массовых будущих изменений.
Решение APC by Schneider Electric Capacity обеспечивает автоматизированную обработку информации о свободных ресурсах инженерной инфраструктуры, реальном потреблении мощности и пространстве в стойках. Обращаясь к серверу ISX Central, системы APC by Schneider Electric Capacity Manager и APC by Schneider Electric Change Manager оценивают степень загрузки ИБП и систем охлаждения InRow, прогнозируют воздействие предполагаемых изменений и предлагают оптимальное место для установки нового или перестановки имеющегося оборудования. Новые решения позволяют, выявив последствия от предполагаемых изменений, правильно спланировать замену оборудования в ЦОД.
Переход от частного к общему может потребовать интеграции ISX Central в такие, например, порталы управления, как Tivoli или Open View. Возможны и другие сценарии, когда ISX Central вписывается и в SCADA–систему. В этом случае ISX Central выполняет роль диспетчерской настройки, функционал которой распространяется на серверную комнату, но не охватывает целиком периметр объекта.Случай из практики
Решение задачи управления энергообеспечением ЦОД иногда вступает в противоречие с правилами устройств электроустановок (ПУЭ). Может оказаться, что в соответствии с ПУЭ в ряде случаев (например, при компоновке щитов ВРУ) необходимо обеспечить механические блокировки. Однако далеко не всегда это удается сделать. Поэтому такая задача часто требует нетривиального решения.
— В одном из проектов, — вспоминает Алексей Сарыгин, — где система управления включала большое количество точек со взаимными пересечениями блокировок, требовалось не допустить снижения общей надежности системы. В этом случае мы пришли к осознанному компромиссу, сделали систему полуавтоматической. Там, где это было возможно, присутствовали механические блокировки, за пультом дежурной смены были оставлены функции мониторинга и анализа, куда сводились все данные о положении всех автоматов. Но исполнительную часть вывели на отдельную панель управления уже внутри ВРУ, где были расположены подробные пользовательские инструкции по оперативному переключению. Таким образом мы избавились от излишней автоматизации, но постарались минимизировать потери в надежности и защититься от ошибок персонала.
[ http://www.computerra.ru/cio/old/products/infrastructure/421312/]Тематики
EN
Русско-английский словарь нормативно-технической терминологии > управление электропитанием
-
53 линия связи
линия связи
Совокупность технических устройств и физической среды, обеспечивающая передачу электрических сигналов от передатчика к приёмнику
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]
линия связи
Линия передачи, физические цепи и линейно-кабельные сооружения связи.
[РД 01.120.00-КТН-228-06]
линия связи
Физическая среда (коаксиальный кабель, оптоволокно, витая пара и т.д.) осуществляющая перенос информации между единицами оборудования управления и связи.
[ http://datasheet.do.am/forum/22-4-1]Для построения компьютерных сетей применяются линии связи, использующие различную физическую среду. Физическая среда передачи данных может представлять собой кабель "витая пара", коаксиальные кабель, волоконно-оптический кабель и окружающее пространство.
Линии связи или линии передачи данных - это аппаратура и физическая среда, по которой передаются информационные сигналы (данные).
В одной линии связи можно образовать несколько каналов связи (виртуальных или логических каналов), например путем частотного или временного разделения каналов.Канал связи - это средство односторонней передачи данных. Если линия связи монопольно используется каналом связи, то в этом случае линию связи называют каналом связи.
В зависимости от физической среды передачи данных линии связи можно разделить на:- проводные линии связи без изолирующих и экранирующих оплеток;
- кабельные, где для передачи сигналов используются такие линии связи как кабели "витая пара", коаксиальные кабели или оптоволоконные кабели;
- беспроводные (радиоканалы наземной и спутниковой связи), использующие для передачи сигналов электромагнитные волны, которые распространяются по эфиру.
[ http://www.lessons-tva.info/edu/telecom-loc/m1t2_2loc.html]
Тематики
- линии, соединения и цепи электросвязи
Синонимы
EN
DE
FR
Русско-английский словарь нормативно-технической терминологии > линия связи
-
54 программируемый логический контроллер
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего. Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы. Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7. Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series. Рис. 4. Резервированный контроллер FCP270.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA). Рис. 5. Контроллер AC800M.
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-английский словарь нормативно-технической терминологии > программируемый логический контроллер
55 канал передачи ЕАСС
канал передачи ЕАСС
канал передачи
Комплекс технических средств и среды распространения, обеспечивающий передачу сигнала электросвязи в полосе частот или со скоростью передачи, характерных для данного канала передачи между сетевыми станциями, сетевыми узлами или между сетевой станцией и сетевым узлом ЕАСС, а также между сетевой станцией или сетевым узлом и оконечным устройством первичной сети ЕАСС.
Примечания
1. Каналу передачи ЕАСС присваивают название аналоговый или цифровой, в зависимости от методов передачи сигналов электросвязи.
2. Каналу передачи, в котором на разных его участках используют аналоговые или цифровые методы передачи сигналов электросвязи, присваивают название смешанный канал передачи ЕАСС.
3. Цифровому каналу, в зависимости от скорости передачи сигналов электросвязи, присваивают названия первичный, вторичный, третичный, четверичный, основной цифровой канал.
[ ГОСТ 22348-86]Тематики
Обобщающие термины
Синонимы
EN
19. Канал передачи ЕАСС
Канал передачи
Transmission channel
Комплекс технических средств и среды распространения, обеспечивающий передачу сигнала электросвязи в полосе частот или со скоростью передачи, характерных для данного канала передачи между сетевыми станциями, сетевыми узлами или между сетевой станцией и сетевым узлом ЕАСС, а также между сетевой станцией или сетевым узлом и оконечным устройством первичной сети ЕАСС.
Примечания:
1. Каналу передачи ЕАСС присваивают название аналоговый или цифровой, в зависимости от методов передачи сигналов электросвязи.
2. Каналу передачи, в котором на разных его участках используют аналоговые или цифровые методы передачи сигналов электросвязи, присваивают название смешанный канал передачи ЕАСС.
3. Цифровому каналу, в зависимости от скорости передачи сигналов электросвязи, присваивают названия первичный, вторичный, третичный, четверичный, основной цифровой канал.
Источник: ГОСТ 22348-86: Сеть связи автоматизированная единая. Термины и определения оригинал документа
Русско-английский словарь нормативно-технической терминологии > канал передачи ЕАСС
56 технология коммутации
технология коммутации
-
[Интент]Современные технологии коммутации
[ http://www.xnets.ru/plugins/content/content.php?content.84]Статья подготовлена на основании материалов опубликованных в журналах "LAN", "Сети и системы связи", в книге В.Олифер и Н.Олифер "Новые технологии и оборудование IP-сетей", на сайтах www.citforum.ru и опубликована в журнале "Компьютерные решения" NN4-6 за 2000 год.
- Введение
- Коммутация первого уровня.
- Коммутация второго уровня.
- Коммутация третьего уровня.
- Коммутация четвертого уровня.
- Критерии выбора оборудования, физическая и логическая структура сети
- Качество обслуживания (QoS) и принципы задания приоритетов
- Заключение
Введение
На сегодня практически все организации, имеющие локальные сети, остановили свой выбор на сетях типа Ethernet. Данный выбор оправдан тем, что начало внедрения такой сети сопряжено с низкой стоимостью и простотой реализации, а развитие - с хорошей масштабируемостью и экономичностью.
Бросив взгляд назад - увидим, что развитие активного оборудования сетей шло в соответствии с требованиями к полосе пропускания и надежности. Требования, предъявляемые к большей надежности, привели к отказу от применения в качестве среды передачи коаксиального кабеля и перевода сетей на витую пару. В результате такого перехода отказ работы соединения между одной из рабочих станций и концентратором перестал сказываться на работе других рабочих станций сети. Но увеличения производительности данный переход не принес, так как концентраторы используют разделяемую (на всех пользователей в сегменте) полосу пропускания. По сути, изменилась только физическая топология сети - с общей шины на звезду, а логическая топология по-прежнему осталась - общей шиной.
Дальнейшее развитие сетей шло по нескольким путям:- увеличение скорости,
- внедрение сегментирования на основе коммутации,
- объединение сетей при помощи маршрутизации.
Увеличение скорости при прежней логической топологии - общая шина, привело к незначительному росту производительности в случае большого числа портов.
Большую эффективность в работе сети принесло сегментирование сетей с использованием технология коммутации пакетов. Коммутация наиболее действенна в следующих вариантах:
Вариант 1, именуемый связью "многие со многими" – это одноранговые сети, когда одновременно существуют потоки данных между парами рабочих станций. При этом предпочтительнее иметь коммутатор, у которого все порты имеют одинаковую скорость, (см. Рисунок 1).
Вариант 2, именуемый связью "один со многими" – это сети клиент-сервер, когда все рабочие станции работают с файлами или базой данных сервера. В данном случае предпочтительнее иметь коммутатор, у которого порты для подключения рабочих станций имеют одинаковую небольшую скорость, а порт, к которому подключается сервер, имеет большую скорость,(см. Рисунок 2).

Когда компании начали связывать разрозненные системы друг с другом, маршрутизация обеспечивала максимально возможную целостность и надежность передачи трафика из одной сети в другую. Но с ростом размера и сложности сети, а также в связи со все более широким применением коммутаторов в локальных сетях, базовые маршрутизаторы (зачастую они получали все данные, посылаемые коммутаторами) стали с трудом справляться со своими задачами.
Проблемы с трафиком, связанные с маршрутизацией, проявляются наиболее остро в средних и крупных компаниях, а также в деятельности операторов Internet, так как они вынуждены иметь дело с большими объемами IP-трафика, причем этот трафик должен передаваться своевременно и эффективно.
С подключением настольных систем непосредственно к коммутаторам на 10/100 Мбит/с между ними и магистралью оказывается все меньше промежуточных устройств. Чем выше скорость подключения настольных систем, тем более скоростной должна быть магистраль. Кроме того, на каждом уровне устройства должны справляться с приходящим трафиком, иначе возникновения заторов не избежать.
Рассмотрению технологий коммутации и посвящена данная статья.Коммутация первого уровня
Термин "коммутация первого уровня" в современной технической литературе практически не описывается. Для начала дадим определение, с какими характеристиками имеет дело физический или первый уровень модели OSI:
физический уровень определяет электротехнические, механические, процедурные и функциональные характеристики активации, поддержания и дезактивации физического канала между конечными системами. Спецификации физического уровня определяют такие характеристики, как уровни напряжений, синхронизацию изменения напряжений, скорость передачи физической информации, максимальные расстояния передачи информации, физические соединители и другие аналогичные характеристики.
Смысл коммутации на первом уровне модели OSI означает физическое (по названию уровня) соединение. Из примеров коммутации первого уровня можно привести релейные коммутаторы некоторых старых телефонных и селекторных систем. В более новых телефонных системах коммутация первого уровня применяется совместно с различными способами сигнализации вызовов и усиления сигналов. В сетях передачи данных данная технология применяется в полностью оптических коммутаторах.Коммутация второго уровня
Рассматривая свойства второго уровня модели OSI и его классическое определение, увидим, что данному уровню принадлежит основная доля коммутирующих свойств.
Определение. Канальный уровень (формально называемый информационно-канальным уровнем) обеспечивает надежный транзит данных через физический канал. Канальный уровень решает вопросы физической адресации (в противоположность сетевой или логической адресации), топологии сети, линейной дисциплины (каким образом конечной системе использовать сетевой канал), уведомления о неисправностях, упорядоченной доставки блоков данных и управления потоком информации.
На самом деле, определяемая канальным уровнем модели OSI функциональность служит платформой для некоторых из сегодняшних наиболее эффективных технологий. Большое значение функциональности второго уровня подчеркивает тот факт, что производители оборудования продолжают вкладывать значительные средства в разработку устройств с такими функциями.
С технологической точки зрения, коммутатор локальных сетей представляет собой устройство, основное назначение которого - максимальное ускорение передачи данных за счет параллельно существующих потоков между узлами сети. В этом - его главное отличие от других традиционных устройств локальных сетей – концентраторов (Hub), предоставляющих всем потокам данных сети всего один канал передачи данных.
Коммутатор позволяет передавать параллельно несколько потоков данных c максимально возможной для каждого потока скоростью. Эта скорость ограничена физической спецификацией протокола, которую также часто называют "скоростью провода". Это возможно благодаря наличию в коммутаторе большого числа центров обработки и продвижения кадров и шин передачи данных.
Коммутаторы локальных сетей в своем основном варианте, ставшем классическим уже с начала 90-х годов, работают на втором уровне модели OSI, применяя свою высокопроизводительную параллельную архитектуру для продвижения кадров канальных протоколов. Другими словами, ими выполняются алгоритмы работы моста, описанные в стандартах IEEE 802.1D и 802.1H. Также они имеют и много других дополнительных функций, часть которых вошла в новую редакцию стандарта 802.1D-1998, а часть остается пока не стандартизованной.
Коммутаторы ЛВС отличаются большим разнообразием возможностей и, следовательно, цен - стоимость 1 порта колеблется в диапазоне от 50 до 1000 долларов. Одной из причин столь больших различий является то, что они предназначены для решения различных классов задач. Коммутаторы высокого класса должны обеспечивать высокую производительность и плотность портов, а также поддерживать широкий спектр функций управления. Простые и дешевые коммутаторы имеют обычно небольшое число портов и не способны поддерживать функции управления. Одним из основных различий является используемая в коммутаторе архитектура. Поскольку большинство современных коммутаторов работают на основе патентованных контроллеров ASIC, устройство этих микросхем и их интеграция с остальными модулями коммутатора (включая буферы ввода-вывода) играет важнейшую роль. Контроллеры ASIC для коммутаторов ЛВС делятся на 2 класса - большие ASIC, способные обслуживать множество коммутируемых портов (один контроллер на устройство) и небольшие ASIC, обслуживающие по несколько портов и объединяемые в матрицы коммутации.
Существует 3 варианта архитектуры коммутаторов:
- переключение (cross-bar) с буферизацией на входе,
- самомаршрутизация (self-route) с разделяемой памятью
- высокоскоростная шина.
На рисунке 3 показана блок-схема коммутатора с архитектурой, используемой для поочередного соединения пар портов. В любой момент такой коммутатор может обеспечить организацию только одного соединения (пара портов). При невысоком уровне трафика не требуется хранение данных в памяти перед отправкой в порт назначения - такой вариант называется коммутацией на лету cut-through. Однако, коммутаторы cross-bar требуют буферизации на входе от каждого порта, поскольку в случае использования единственно возможного соединения коммутатор блокируется (рисунок 4). Несмотря на малую стоимость и высокую скорость продвижения на рынок, коммутаторы класса cross-bar слишком примитивны для эффективной трансляции между низкоскоростными интерфейсами Ethernet или token ring и высокоскоростными портами ATM и FDDI.


Коммутаторы с разделяемой памятью имеют общий входной буфер для всех портов, используемый как внутренняя магистраль устройства (backplane). Буферизагия данных перед их рассылкой (store-and-forward - сохранить и переслать) приводит к возникновению задержки. Однако, коммутаторы с разделяемой памятью, как показано на рисунке 5 не требуют организации специальной внутренней магистрали для передачи данных между портами, что обеспечивает им более низкую цену по сравнению с коммутаторами на базе высокоскоростной внутренней шины.

На рисунке 6 показана блок-схема коммутатора с высокоскоростной шиной, связывающей контроллеры ASIC. После того, как данные преобразуются в приемлемый для передачи по шине формат, они помещаются на шину и далее передаются в порт назначения. Поскольку шина может обеспечивать одновременную (паралельную) передачу потока данных от всех портов, такие коммутаторы часто называют "неблокируемыми" (non-blocking) - они не создают пробок на пути передачи данных.

Применение аналогичной параллельной архитектуры для продвижения пакетов сетевых протоколов привело к появлению коммутаторов третьего уровня модели OSI.
Коммутация третьего уровня
В продолжении темы о технологиях коммутации рассмотренных в предыдущем номера повторим, что применение параллельной архитектуры для продвижения пакетов сетевых протоколов привело к появлению коммутаторов третьего уровня. Это позволило существенно, в 10-100 раз повысить скорость маршрутизации по сравнению с традиционными маршрутизаторами, в которых один центральный универсальный процессор выполняет программное обеспечение маршрутизации.
По определению Сетевой уровень (третий) - это комплексный уровень, который обеспечивает возможность соединения и выбор маршрута между двумя конечными системами, подключенными к разным "подсетям", которые могут находиться в разных географических пунктах. В данном случае "подсеть" это, по сути, независимый сетевой кабель (иногда называемый сегментом).
Коммутация на третьем уровне - это аппаратная маршрутизация. Традиционные маршрутизаторы реализуют свои функции с помощью программно-управляемых процессоров, что будем называть программной маршрутизацией. Традиционные маршрутизаторы обычно продвигают пакеты со скоростью около 500000 пакетов в секунду. Коммутаторы третьего уровня сегодня работают со скоростью до 50 миллионов пакетов в секунду. Возможно и дальнейшее ее повышение, так как каждый интерфейсный модуль, как и в коммутаторе второго уровня, оснащен собственным процессором продвижения пакетов на основе ASIC. Так что наращивание количества модулей ведет к наращиванию производительности маршрутизации. Использование высокоскоростной технологии больших заказных интегральных схем (ASIC) является главной характеристикой, отличающей коммутаторы третьего уровня от традиционных маршрутизаторов. Коммутаторы 3-го уровня делятся на две категории: пакетные (Packet-by-Packet Layer 3 Switches, PPL3) и сквозные (Cut-Through Layer 3 Switches, CTL3). PPL3 - означает просто быструю маршрутизацию (Рисунок_7). CTL3 – маршрутизацию первого пакета и коммутацию всех остальных (Рисунок 8).

У коммутатора третьего уровня, кроме реализации функций маршрутизации в специализированных интегральных схемах, имеется несколько особенностей, отличающих их от традиционных маршрутизаторов. Эти особенности отражают ориентацию коммутаторов 3-го уровня на работу, в основном, в локальных сетях, а также последствия совмещения в одном устройстве коммутации на 2-м и 3-м уровнях:
- поддержка интерфейсов и протоколов, применяемых в локальных сетях,
- усеченные функции маршрутизации,
- обязательная поддержка механизма виртуальных сетей,
- тесная интеграция функций коммутации и маршрутизации, наличие удобных для администратора операций по заданию маршрутизации между виртуальными сетями.
Наиболее "коммутаторная" версия высокоскоростной маршрутизации выглядит следующим образом (рисунок 9). Пусть коммутатор третьего уровня построен так, что в нем имеется информация о соответствии сетевых адресов (например, IP-адресов) адресам физического уровня (например, MAC-адресам) Все эти МАС-адреса обычным образом отображены в коммутационной таблице, независимо от того, принадлежат ли они данной сети или другим сетям.

Первый коммутатор, на который поступает пакет, частично выполняет функции маршрутизатора, а именно, функции фильтрации, обеспечивающие безопасность. Он решает, пропускать или нет данный пакет в другую сеть Если пакет пропускать нужно, то коммутатор по IP-адресу назначения определяет МАС-адрес узла назначения и формирует новый заголовок второго уровня с найденным МАС-адресом. Затем выполняется обычная процедура коммутации по данному МАС-адресу с просмотром адресной таблицы коммутатора. Все последующие коммутаторы, построенные по этому же принципу, обрабатывают данный кадр как обычные коммутаторы второго уровня, не привлекая функций маршрутизации, что значительно ускоряет его обработку. Однако функции маршрутизации не являются для них избыточными, поскольку и на эти коммутаторы могут поступать первичные пакеты (непосредственно от рабочих станций), для которых необходимо выполнять фильтрацию и подстановку МАС-адресов.
Это описание носит схематический характер и не раскрывает способов решения возникающих при этом многочисленных проблем, например, проблемы построения таблицы соответствия IP-адресов и МАС-адресов
Примерами коммутаторов третьего уровня, работающих по этой схеме, являются коммутаторы SmartSwitch компании Cabletron. Компания Cabletron реализовала в них свой протокол ускоренной маршрутизации SecureFast Virtual Network, SFVN.
Для организации непосредственного взаимодействия рабочих станций без промежуточного маршрутизатора необходимо сконфигурировать каждую из них так, чтобы она считала собственный интерфейс маршрутизатором по умолчанию. При такой конфигурации станция пытается самостоятельно отправить любой пакет конечному узлу, даже если этот узел находится в другой сети. Так как в общем случае (см. рисунок 10) станции неизвестен МАС-адрес узла назначения, то она генерирует соответствующий ARP-запрос, который перехватывает коммутатор, поддерживающий протокол SFVN. В сети предполагается наличие сервера SFVN Server, являющегося полноценным маршрутизатором и поддерживающего общую ARP-таблицу всех узлов SFVN-сети. Сервер возвращает коммутатору МАС-адрес узла назначения, а коммутатор, в свою очередь, передает его исходной станции. Одновременно сервер SFVN передает коммутаторам сети инструкции о разрешении прохождения пакета с МАС-адресом узла назначения через границы виртуальных сетей. Затем исходная станция передает пакет в кадре, содержащем МАС-адрес узла назначения. Этот кадр проходит через коммутаторы, не вызывая обращения к их блокам маршрутизации. Отличие протокола SFVN компании Cabletron от - описанной выше общей схемы в том, что для нахождения МАС-адреса по IP-адресу в сети используется выделенный сервер.
Протокол Fast IP компании 3Com является еще одним примером реализации подхода с отображением IP-адреса на МАС-адрес. В этом протоколе основными действующими лицами являются сетевые адаптеры (что не удивительно, так как компания 3Com является признанным лидером в производстве сетевых адаптеров Ethernet) С одной стороны, такой подход требует изменения программного обеспечения драйверов сетевых адаптеров, и это минус Но зато не требуется изменять все остальное сетевое оборудование.
При необходимости передать пакет узлу назначения другой сети, исходный узел в соответствии с технологией Fast IP должен передать запрос по протоколу NHRP (Next Hop Routing Protocol) маршрутизатору сети. Маршрутизатор переправляет этот запрос узлу назначения, как обычный пакет Узел назначения, который также поддерживает Fast IP и NHRP, получив запрос, отвечает кадром, отсылаемым уже не маршрутизатору, а непосредственно узлу-источнику (по его МАС-адресу, содержащемуся в NHRP-запросе). После этого обмен идет на канальном уровне на основе известных МАС-адресов. Таким образом, снова маршрутизировался только первый пакет потока (как на рисунке 9 кратковременный поток), а все остальные коммутировались (как на рисунке 9 долговременный поток).
Еще один тип коммутаторов третьего уровня — это коммутаторы, работающие с протоколами локальных сетей типа Ethernet и FDDI. Эти коммутаторы выполняют функции маршрутизации не так, как классические маршрутизаторы. Они маршрутизируют не отдельные пакеты, а потоки пакетов.
Поток — это последовательность пакетов, имеющих некоторые общие свойства. По меньшей мере, у них должны совпадать адрес отправителя и адрес получателя, и тогда их можно отправлять по одному и тому же маршруту. Если классический способ маршрутизации использовать только для первого пакета потока, а все остальные обрабатывать на основании опыта первого (или нескольких первых) пакетов, то можно значительно ускорить маршрутизацию всего потока.
Рассмотрим этот подход на примере технологии NetFlow компании Cisco, реализованной в ее маршрутизаторах и коммутаторах. Для каждого пакета, поступающего на порт маршрутизатора, вычисляется хэш-функция от IP-адресов источника, назначения, портов UDP или TCP и поля TOS, характеризующего требуемое качество обслуживания. Во всех маршрутизаторах, поддерживающих данную технологию, через которые проходит данный пакет, в кэш-памяти портов запоминается соответствие значения хэш-функции и адресной информации, необходимой для быстрой передачи пакета следующему маршрутизатору. Таким образом, образуется квазивиртуальный канал (см. Рисунок 11), который позволяет быстро передавать по сети маршрутизаторов все последующие пакеты этого потока. При этом ускорение достигается за счет упрощения процедуры обработки пакета маршрутизатором - не просматриваются таблицы маршрутизации, не выполняются ARP-запросы.
Этот прием может использоваться в маршрутизаторах, вообще не поддерживающих коммутацию, а может быть перенесен в коммутаторы. В этом случае такие коммутаторы тоже называют коммутаторами третьего уровня. Примеров маршрутизаторов, использующих данный подход, являются маршрутизаторы Cisco 7500, а коммутаторов третьего уровня — коммутаторы Catalyst 5000 и 5500. Коммутаторы Catalyst выполняют усеченные функции описанной схемы, они не могут обрабатывать первые пакеты потоков и создавать новые записи о хэш-функциях и адресной информации потоков. Они просто получают данную информацию от маршрутизаторов 7500 и обрабатывают пакеты уже распознанных маршрутизаторами потоков.
Выше был рассмотрен способ ускоренной маршрутизации, основанный на концепции потока. Его сущность заключается в создании квазивиртуальных каналов в сетях, которые не поддерживают виртуальные каналы в обычном понимании этого термина, то есть сетях Ethernet, FDDI, Token Ring и т п. Следует отличать этот способ от способа ускоренной работы маршрутизаторов в сетях, поддерживающих технологию виртуальных каналов — АТМ, frame relay, X 25. В таких сетях создание виртуального канала является штатным режимом работы сетевых устройств. Виртуальные каналы создаются между двумя конечными точками, причем для потоков данных, требующих разного качества обслуживания (например, для данных разных приложений) может создаваться отдельный виртуальный канал. Хотя время создания виртуального канала существенно превышает время маршрутизации одного пакета, выигрыш достигается за счет последующей быстрой передачи потока данных по виртуальному каналу. Но в таких сетях возникает другая проблема — неэффективная передача коротких потоков, то есть потоков, состоящих из небольшого количества пакетов (классический пример — пакеты протокола DNS).
Накладные расходы, связанные с созданием виртуального канала, приходящиеся на один пакет, снижаются при передаче объемных потоков данных. Однако они становятся неприемлемо высокими при передаче коротких потоков. Для того чтобы эффективно передавать короткие потоки, предлагается следующий вариант, при передаче нескольких первых пакетов выполняется обычная маршрутизация. Затем, после того как распознается устойчивый поток, для него строится виртуальный канал, и дальнейшая передача данных происходит с высокой скоростью по этому виртуальному каналу. Таким образом, для коротких потоков виртуальный канал вообще не создается, что и повышает эффективность передачи.
По такой схеме работает ставшая уже классической технология IP Switching компании Ipsilon. Для того чтобы сети коммутаторов АТМ передавали бы пакеты коротких потоков без установления виртуального канала, компания Ipsilon предложила встроить во все коммутаторы АТМ блоки IP-маршрутизации (рисунок 12), строящие обычные таблицы маршрутизации по обычным протоколам RIP и OSPF.
Компания Cisco Systems выдвинула в качестве альтернативы технологии IP Switching свою собственную технологию Tag Switching, но она не стала стандартной. В настоящее время IETF работает над стандартным протоколом обмена метками MPLS (Multi-Protocol Label Switching), который обобщает предложение компаний Ipsilon и Cisco, а также вносит некоторые новые детали и механизмы. Этот протокол ориентирован на поддержку качества обслуживания для виртуальных каналов, образованных метками.
Коммутация четвертого уровня
Свойства четвертого или транспортного уровня модели OSI следующие: транспортный уровень обеспечивает услуги по транспортировке данных. В частности, заботой транспортного уровня является решение таких вопросов, как выполнение надежной транспортировки данных через объединенную сеть. Предоставляя надежные услуги, транспортный уровень обеспечивает механизмы для установки, поддержания и упорядоченного завершения действия виртуальных каналов, систем обнаружения и устранения неисправностей транспортировки и управления информационным потоком (с целью предотвращения переполнения данными из другой системы).
Некоторые производители заявляют, что их системы могут работать на втором, третьем и даже четвертом уровнях. Однако рассмотрение описания стека TCP/IP (рисунок 1), а также структуры пакетов IP и TCP (рисунки 2, 3), показывает, что коммутация четвертого уровня является фикцией, так как все относящиеся к коммутации функции осуществляются на уровне не выше третьего. А именно, термин коммутация четвертого уровня с точки зрения описания стека TCP/IP противоречий не имеет, за исключением того, что при коммутации должны указываться адреса компьютера (маршрутизатора) источника и компьютера (маршрутизатора) получателя. Пакеты TCP имеют поля локальный порт отправителя и локальный порт получателя (рисунок 3), несущие смысл точек входа в приложение (в программу), например Telnet с одной стороны, и точки входа (в данном контексте инкапсуляции) в уровень IP. Кроме того, в стеке TCP/IP именно уровень TCP занимается формированием пакетов из потока данных идущих от приложения. Пакеты IP (рисунок 2) имеют поля адреса компьютера (маршрутизатора) источника и компьютера (маршрутизатора) получателя и следовательно могут наряду с MAC адресами использоваться для коммутации. Тем не менее, название прижилось, к тому же практика показывает, что способность системы анализировать информацию прикладного уровня может оказаться полезной — в частности для управления трафиком. Таким образом, термин "зависимый от приложения" более точно отражает функции так называемых коммутаторов четвертого уровня.


Тематики
EN
Русско-английский словарь нормативно-технической терминологии > технология коммутации
57 электросвязь
электросвязь
Передача и прием сигналов, отображающих звуки, изображения, письменный текст, знаки или сообщения любого рода по электромагнитным системам.
[ ГОСТ 22348-86]
электросвязь
Любая передача, излучение или прием знаков, сигналов, письменного текста, изображений и звуков или сообщений любого рода с помощью проводной, радио, оптической или других электромагнитных систем.
[ОСТ 45.124-2000]
телекоммуникация
Отрасль или технология, связанная с передачей, приемом и обработкой сигналов, данных и информации.
[Дмитрий Мацкевич. Справочное руководство. Основные понятия, требования, рекомендации и правила проектирования и инсталляции СКС LANMASTER. Версия 2.01]
телекоммуникации
электросвязь
Передача, излучение и/или прием знаков, сигналов, письменного текста, изображений и звуков или сообщений любого рода по радио, проводных, оптических или других электромагнитных системах
[ http://testsvyaz.com.ua/en/laws/view/37]
телекоммуникация
Любая передача, излучение или прием символов, сигналов, текста, изображений и звука, то есть информации любого характера, посредством кабельных, радио, оптических или других электромагнитных систем.
[ANSI/TIA/EIA-607-1994]EN
telecommunications
The conveyance of images, speech and other sounds, usually over great distances, through technological means, particularly by television, telegraph, telephone or radio. (Source: RHW)
[http://www.eionet.europa.eu/gemet/alphabetic?langcode=en]Тематики
- электросвязь, основные понятия
Синонимы
EN
DE
FR
Русско-английский словарь нормативно-технической терминологии > электросвязь
58 канал
duct, pipe вчт., chain, (1. тракт передачи данных; носитель передаваемых данных 2. ресурсы системы связи или системы вещания, выделяемые для передачи определённых данных 3. любой из составляющих сигналов в стереофонии или квадрафонии 4. тлв. любой из сигналов цветности 5. любой из сигналов в многоканальной системе 6. пп. область между истоком и стоком в полевом транзисторе, канальная область 7. микр. область между соседними матрицами логических элементов в специализированной ИС) channel, ( в многоканальной системе) branch, circuit, canal, (напр. связи) path59 канал
duct, pipe вчт., ( в многоканальной системе) branch, circuit, canal, chain, (1. тракт передачи данных; носитель передаваемых данных 2. ресурсы системы связи или системы вещания, выделяемые для передачи определённых данных 3. любой из составляющих сигналов в стереофонии или квадрафонии 4. тлв. любой из сигналов цветности 5. любой из сигналов в многоканальной системе 6. пп. область между истоком и стоком в полевом транзисторе, канальная область 7. микр. область между соседними матрицами логических элементов в специализированной ИС) channel, (напр. связи) path60 информация (в кибернетике)
информация (в кибернетике)
Основное понятие кибернетики, точно так же экономическая И. — основное понятие экономической кибернетики. Определений этого термина много, они сложны и противоречивы. Причина этого, очевидно, в том, что И. как явлением занимается много разных наук, и кибернетика лишь самая молодая из них. И. — предмет изучения таких наук, как наука об управлении, математическая статистика, генетика, теория средств массовой И. (печать, радио, телевидение), информатика (1), занимающаяся проблемами научно-технической И., и т.д. Наконец, последнее время большой интерес к проблемам И. проявляют философы: они склонны рассматривать И. как одно из основных универсальных свойств материи, связанное с понятием отражения. При всех трактовках понятия И., она предполагает существование двух объектов: источника И. и потребителя (получателя) И. Передача И. от одного к другому происходит с помощью сигналов, которые, вообще говоря, могут не иметь никакой физической связи с ее смыслом: эта связь определяется соглашением. Например, удар в вечевой колокол означал, что надо собираться на площадь, но тем, кто не знал об этом порядке, он не сообщал никакой И. В ситуации с вечевым колоколом человек, участвующий в соглашении о смысле сигнала, знает, что в данный момент могут быть две альтернативы: вечевое собрание состоится или не состоится. Или, выражаясь языком теории И., неопределенное событие «вече» имеет два исхода. Принятый сигнал приводит к уменьшению неопределенности: человек теперь знает, что событие «вече» имеет только один исход — оно состоится. Однако, если было заранее известно, что вече состоится в таком-то часу, колокол ничего нового не сообщил. Отсюда вытекает, что, чем менее вероятно (т.е. более неожиданно) сообщение, тем больше И. оно содержит, и наоборот, чем больше вероятность исхода до совершения события, тем меньше И. содержит сигнал. Примерно такие рассуждения привели в 40-х годах XX в. к возникновению статистической, или «классической«, теории И., которая определяет понятие И. через меру уменьшения неопределенности знания о свершении какого-либо события (такая мера была названа энтропией). У истоков этой науки стояли Н.Винер, К.Шеннон и советские ученые А.Н.Колмогоров, В.А.Котельников и др. Им удалось вывести математические закономерности измерения количества И., а отсюда и такие понятия, как пропускная способность канала И., емкость запоминающих И. устройств и т.п., что послужило мощным стимулом к развитию кибернетики как науки и электронно-вычислительной техники, как применения достижений кибернетики на практике. Что касается определения ценности, полезности И. для получателя, то здесь еще много нерешенного, неясного. Если исходить из потребностей экономического управления и, следовательно, экономической кибернетики, то И. можно определить как все те сведения, знания, сообщения, которые помогают решить ту или иную задачу управления (т.е. уменьшить неопределенность ее исходов). Тогда открываются и некоторые возможности для оценки И.: она тем полезнее, ценнее, чем скорее или с меньшими затратами приводит к решению задачи. Понятие И. близко понятию «данные«. Однако между ними есть различие: данные — это сигналы, из которых еще надо извлечь И. Обработка данных есть процесс приведения их к пригодному для этого виду. Процесс их передачи от источника к потребителю и восприятия в качестве И. может рассматриваться как прохождение трех фильтров: 1) физического, или статистического (чисто количественное ограничение по пропускной способности канала, независимо от содержания данных, т.е. с точки зрения синтактики); 2) семантического (отбор тех данных, которые могут быть поняты получателем, т.е. соответствуют тезаурусу его знаний); 3) прагматического (отбор среди понятых сведений тех, которые полезны для решения данной задачи). Это хорошо показано на схеме, взятой из книги Е.Г.Ясина об экономической информации (см. рис. И.8). Соответственно, выделяются три аспекта изучения проблем И. — синтаксический, семантический и прагматический. По содержанию И. подразделяется на общественно-политическую, социально-экономическую (в том числе экономическую И.), научно-техническую и т.д. Вообще же классификаций И. много, они строятся по различным основаниям. Как правило, из-за близости понятий точно так же строятся и классификации данных. Например, И. подразделяется на статическую (постоянную) и динамическую (переменную), и данные при этом — на постоянные и на переменные. Другое деление — первичная, производная, выходная И.: так же классифицируются данные. Третье деление — И. управляющая и осведомляющая. Четвертое — избыточная, полезная и ложная. Пятое — полная (сплошная) и выборочная. См. также Банк данных, Данные, Выборочная информация, Избыточная информация, Обработка данных, Прагматический аспект информации, Релевантная информация, Сбор данных, Семантический аспект информации Теория информации, Экономическая информация, Экономическая семиотика, Энтропия. Рис. И 8. Процесс передачи и восприятия информации Д — данные; I — физический фильтр (канал связи), 1 — статистическая информация, а — статистический шум; II — семантический фильтр (тезаурус), 2 — семантическая информация, б - семантический шум; III — прагматический фильтр, 3 — прагматическая информация; в — прагматический шум (ненужная, например,. избыточная информация). И — используемая информация.
[ http://slovar-lopatnikov.ru/]Тематики
EN
Русско-английский словарь нормативно-технической терминологии > информация (в кибернетике)
СтраницыСм. также в других словарях:
сбор данных — Автоматический съем данных с промышленной или экспериментальной установки с помощью датчиков. [http://www.morepc.ru/dict/] сбор данных Операция получения данных, например, от клавиатуры, сканера или в автоматическом режиме от записывающего или… … Справочник технического переводчика
ГОСТ 17657-79: Передача данных. Термины и определения — Терминология ГОСТ 17657 79: Передача данных. Термины и определения оригинал документа: 78. n кратная ошибка в цифровом сигнале данных n кратная ошибка Е. n fold error Группа из и ошибок в цифровом сигнале данных, при которой ошибочные единичные… … Словарь-справочник терминов нормативно-технической документации
ГОСТ Р ИСО/МЭК 19762-1-2011: Информационные технологии. Технологии автоматической идентификации и сбора данных (АИСД). Гармонизированный словарь. Часть 1. Общие термины в области АИСД — Терминология ГОСТ Р ИСО/МЭК 19762 1 2011: Информационные технологии. Технологии автоматической идентификации и сбора данных (АИСД). Гармонизированный словарь. Часть 1. Общие термины в области АИСД оригинал документа: Accredited Standards… … Словарь-справочник терминов нормативно-технической документации
ГОСТ Р ИСО/МЭК 19762-4-2011: Информационные технологии. Технологии автоматической идентификации и сбора данных (АИСД). Гармонизированный словарь. Часть 4. Общие термины в области радиосвязи — Терминология ГОСТ Р ИСО/МЭК 19762 4 2011: Информационные технологии. Технологии автоматической идентификации и сбора данных (АИСД). Гармонизированный словарь. Часть 4. Общие термины в области радиосвязи оригинал документа: ALOHA [ALOHA slotted]:… … Словарь-справочник терминов нормативно-технической документации
ГОСТ Р ИСО/МЭК 19762-3-2011: Информационные технологии. Технологии автоматической идентификации и сбора данных (АИСД). Гармонизированный словарь. Часть 3. Радиочастотная идентификация (РЧИ) — Терминология ГОСТ Р ИСО/МЭК 19762 3 2011: Информационные технологии. Технологии автоматической идентификации и сбора данных (АИСД). Гармонизированный словарь. Часть 3. Радиочастотная идентификация (РЧИ) оригинал документа: 05.02.21 абстрактный… … Словарь-справочник терминов нормативно-технической документации
Базовая модель угроз безопасности персональных данных при их обработке, в информационных системах персональных данных (выписка) — Терминология Базовая модель угроз безопасности персональных данных при их обработке, в информационных системах персональных данных (выписка): Автоматизированная система система, состоящая из персонала и комплекса средств автоматизации его… … Словарь-справочник терминов нормативно-технической документации
ГОСТ 23633-79: Стыки в системах передачи данных. Термины и определения — Терминология ГОСТ 23633 79: Стыки в системах передачи данных. Термины и определения оригинал документа: 3. Акустический стык устройств передачи сигнала данных Акустический стык Acoustic joint Стык устройств передачи сигнала данных, через который… … Словарь-справочник терминов нормативно-технической документации
Карта данных — Нейронные сети Кохонена класс нейронных сетей, основным элементом которых является слой Кохонена. Слой Кохонена состоит из адаптивных линейных сумматоров («линейных формальных нейронов»). Как правило, выходные сигналы слоя Кохонена… … Википедия
Методы кодирования цифровых сигналов — В этой статье не хватает ссылок на источники информации. Информация должна быть проверяема, иначе она может быть поставлена под сомнение и удалена. Вы можете … Википедия
Передача данных — (иногда телекодовая связь) область электросвязи (См. Электросвязь), имеющая целью передачу информации, представленной на основе заранее установленных правил в формализованном виде знаками или непрерывными функциями и предназначенной для… … Большая советская энциклопедия
Целостность сигналов — (Signal Integrity) набор качественных характеристик для определения качества электрического сигнала. Любой цифровой сигнал по своей сути является аналоговым, то есть представлен эпюрами напряжения (или тока) определенной формы. Очевидно, что… … Википедия
 18+© Академик, 2000-2024
18+© Академик, 2000-2024- Обратная связь: Техподдержка, Реклама на сайте
Экспорт словарей на сайты, сделанные на PHP, Joomla, Drupal, WordPress, MODx.
Перевод: со всех языков на английский
с английского на все языки- С английского на:
- Все языки
- Со всех языков на:
- Все языки
- Английский
- Немецкий
- Русский
- Французский