-
101 address
- трансляция сетевых адресов
- адрес в пространстве памяти
- адрес
- WKS-RDATA:: = ADDRESS PROTOCOL BIT-MAP
- A-RDATA:: = ADDRESS
адрес
Символ или группа символов, которые идентифицируют источники данных или место назначения информации.
Примечание
Источниками данных могут быть регистр, отдельные части памяти и другие.
[ ГОСТ Р 50304-92 ]
адрес
Уникальный номер или символическое имя, присваиваемые сети, подсети, узлу или сетевому устройству, чтобы другие сети и устройства могли распознать его при обмене информацией. Адреса бывают логическими (символическими или условными), физическими (аппаратными) и сетевыми. См. anycast~, destination -, group ~, indirect ~, IP ~, multicast-, null, -source ~, subaddress, unicast-.
[Л.М. Невдяев. Телекоммуникационные технологии. Англо-русский толковый словарь-справочник. Под редакцией Ю.М. Горностаева. Москва, 2002]Тематики
- системы для сопряж. радиоэлектр. средств интерфейсные
- электросвязь, основные понятия
Обобщающие термины
EN
адрес в пространстве памяти
адрес
Элемент множества порций данных, являющегося областью определения функции адресации.
[ ГОСТ 19781-90]Тематики
- обеспеч. систем обраб. информ. программное
Синонимы
EN
трансляция сетевых адресов
сетевой маскарад
Механизм подмены внутреннего сетевого адреса (IP-адреса) абонента локальной сети на внешний адрес Интернет-шлюза. Применяется для экономии глобальных адресов и защиты абонентов от прямого доступа извне, но если такой доступ нужен, требуются дополнительные механизмы обхода NAT.
[ http://www.morepc.ru/dict/]Тематики
Синонимы
EN
59. Адрес в пространстве памяти
Адрес
Storage address
Address
Элемент множества порций данных, являющегося областью определения функции адресации
Источник: ГОСТ 19781-90: Обеспечение систем обработки информации программное. Термины и определения оригинал документа
5.3.2.1.8. A-RDATA:: = ADDRESS
ADDRESS
:: = < 32-битный адрес IР>
; Узлы, имеющие несколько адресов IP, имеют несколько
; записей RR A
; в контрольном файле A-RDATA хранится как 4 десятичных
; числа, разделенных точками без пробелов.
Источник: РД 45.134-2000: Средства технические телематических служб. Общие технические требования
5.3.2.1.9. WKS-RDATA:: = ADDRESS PROTOCOL BIT-MAP
ADDRESS
:: = < 32-разрядный адрес IР>
PROTOCOL
:: = 8(Xbit); номер протокола IP
BIT-MAP
:: = *(8(Xbit)); битовая маска
; запись WKS предназначена для описания хорошо известных
; сервисов, поддерживаемых отдельным протоколом на отдельных
; адресах IP
; Битовая маска указывает порт протокола. Первый бит
; соответствует 0-му порту, второй - 1-му и т.д.
; Значения номеров протоколов и портов должны
; соответствовать RFC 1700 [9]
5.3.3. Формат RR в контрольных файлах
Большинство RR занимают единственную строку, хотя возможны строки продолжения с использованием скобок.
Для улучшения читаемости могут быть включены пустые строки.
Начало строки указывает владельца. Если начало строки пустое, тогда владелец предполагается таким же, как и в предыдущей RR. Далее идут TTL, класс и тип.
Более подробно формат RR в контрольном файле описан в п. 6.4.4.
5.3.4. Шаблоны
Имя владельца в записи RR может начинаться с символа «*». Такие RR называются шаблонами. Наиболее часто шаблоны используются для создания зон, которые в свою очередь, используются для перенаправления почты из Internet в некоторую другую почтовую систему. Любое имя, соответствующее шаблону, будет принадлежать такой зоне и обладать определенными свойствами согласно данным, указанным в RR с шаблоном, если только не существует RR, точно соответствующий имени.
Шаблоны не применяются, когда:
- запрос принадлежит другой зоне,
- известно, что существует запрашиваемое имя либо имя между запрашиваемым именем и шаблоном.
Например, если есть RR-шаблон с именем владельца «*.Х» и в данной зоне также содержатся RR, прикрепленные к В.Х, шаблоны будут применяться к запрашиваемому имени Z.X, но не к запрашиваемому имени В.Х, А.В.Х или X.
Символ «*» в запрашиваемом имени не имеет специального значения, но может использоваться для тестирования шаблонов в авторитетной зоне. Запрос с «*» является единственным способом получить ответ, содержащий RR-шаблоны. Результат такого запроса не должен кэшироваться.
Пример использования шаблонов:
Пусть существует большая компания с большой сетью не-ТСР/IP. Эта компания хочет создать почтовый шлюз. Если компания названа Х.СОМ, и шлюз ТСР/IР назван А.Х.СОМ, то в зону СОМ могут быть введены следующие записи RR.
Х.СОМ
MX
10
А.Х.СОМ
*.Х.СОМ
MX
10
А.Х.СОМ
А.Х.СОМ
А
1.2.3.4
А.Х.СОМ
MX
10
А.Х.СОМ
*.А.Х.СОМ
MX
10
А.Х.СОМ
Данные записи будут заставлять сервер на любой запрос MX для любого доменного имени, заканчивающегося Х.СОМ возвращать запись MX RR, указывающую на А.Х.СОМ. Последний шаблон необходим, так как действие первого шаблона перекрывается 4-й строкой.
Источник: РД 45.134-2000: Средства технические телематических служб. Общие технические требования
Англо-русский словарь нормативно-технической терминологии > address
-
102 plc
- связь по ЛЭП
- программируемый логический контроллер
- несущая в канале ВЧ-связи по ЛЭП
- маскирование потери пакета
- контроллер с программируемой логикой
- акционерная компания с ограниченной ответственностью
акционерная компания с ограниченной ответственностью
AG - аббревиатура для обозначения AKTIENGESELLSCHAFT (акционерное общество). Оно пишется после названия немецких, австрийских или швейцарских компаний и является эквивалентом английской аббревиатуры plc (public limited company-акционерная компания с ограниченной ответственностью). Сравни: GmbH.
[ http://www.vocable.ru/dictionary/533/symbol/97]Тематики
EN
DE
- AG
контроллер с программируемой логикой
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
маскирование потери пакета
Метод сокрытия факта потери медиапакетов путем генерирования синтезируемых пакетов (МСЭ-T G.1050).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
несущая в канале ВЧ-связи по ЛЭП
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999]Тематики
- электротехника, основные понятия
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего. Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы. Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7. Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series. Рис. 4. Резервированный контроллер FCP270.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA). Рис. 5. Контроллер AC800M.
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
связь по ЛЭП
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
Англо-русский словарь нормативно-технической терминологии > plc
103 MS
- хранилище сообщений
- система мобильной связи
- сигнал обслуживания
- сепаратор влаги
- секция мультиплексирования
- ручное переключение сигнала нормального трафика
- рукопись
- расплав соли
- послание
- подвижная станция
- нормально отключённый выключатель
- наибольшее напряжение
- молярное замещение
- многократное рассеяние
- многоадресный контроль выборочных значений (функциональная связь)
- миллисекунда
- микросекунда
- микроволновый спутник
- метрическая система
- масса пара
- масс-спектрометрия
- малоуглеродистая сталь
- максимальная надёжность
- максимальная безопасность
- магнитостатический
- магнитное запоминающее устройство
- магистр наук
- корпорация Microsoft
- диспетчерский пункт управления (в SCADA)
- выключатель электропитания
- американская корпорация, крупнейший в мире производитель программного обеспечения (Майкрософт)
американская корпорация, крупнейший в мире производитель программного обеспечения (Майкрософт)
MC
—
[[http://www.rfcmd.ru/glossword/1.8/index.php?a=index&d=23]]Тематики
Синонимы
- MC
EN
выключатель электропитания
выключатель питания
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]
выключатель электропитания
выключатель питания
-
[Интент]См. также аппарат отключения питания
АСУ электротехнических систем должна обеспечивать реализацию следующих функций:
- синхронизацию генераторов;
- управление выключателями главной электрической схемы электростанции, выключателями питания собственных нужд, в том числе аварийными дизель- генераторами;
[ВРД 39-1.10-071-2003 ]Тематики
- НКУ (шкафы, пульты,...)
- электробезопасность
Обобщающие термины
Синонимы
EN
диспетчерский пункт управления
диспетчерский пункт
ДП
главный терминал
-
[Интент]Master Terminal Unit (MTU), Master Station (MS) диспетчерский пункт управления (главный терминал); осуществляет обработку данных и управление высокого уровня, как правило, в режиме мягкого (квази-) реального времени; одна из основных функций обеспечение интерфейса между человеком-оператором и системой (HMI, MMI). В зависимости от конкретной системы MTU может быть реализован в самом разнообразном виде от одиночного компьютера с дополнительными устройствами подключения к каналам связи до больших вычислительных систем (мэйнфреймов) и/или объединенных в локальную сеть рабочих станций и серверов. Как правило, и при построении MTU используются различные методы повышения надежности и безопасности работы системы.
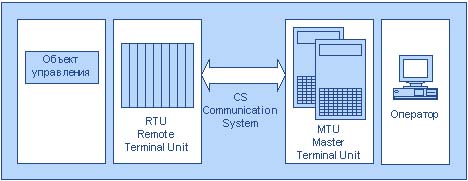
Рис. 2. Основные структурные компоненты SCADA-системыГлавной тенденцией развития MTU (диспетчерских пунктов управления) является переход большинства разработчиков SCADA-систем на архитектуру клиент-сервер, состоящую из 4-х функциональных компонентов.
1. User (Operator) Interface (интерфейс пользователя/оператора) исключительно важная составляющая систем SCADA. Для нее характерны
а) стандартизация интерфейса пользователя вокруг нескольких платформ;
б) все более возрастающее влияние Windows NT;
в) использование стандартного графического интерфейса пользователя (GUI);
г) технологии объектно-ориентированного программирования: DDE, OLE, Active X, OPC (OLE for Process Control), DCOM;
д) стандартные средства разработки приложений, наиболее популярные среди которых, Visual Basic for Applications (VBA), Visual C++;
е) появление коммерческих вариантов программного обеспечения класса SCADA/MMI для широкого спектра задач. Объектная независимость позволяет интерфейсу пользователя представлять виртуальные объекты, созданные другими системами. Результат расширение возможностей по оптимизации HMI-интерфейса.
2. Data Management (управление данными) - отход от узкоспециализированных баз данных в сторону поддержки большинства корпоративных реляционных баз данных (Microsoft SQL, Oracle). Функции управления данными и генерации отчетов осуществляются стандартными средствами SQL, 4GL; эта независимость данных изолирует функции доступа и управления данными от целевых задач SCADA, что позволяет легко разрабатывать дополнительные приложения по анализу и управлению данными.
3. Networking & Services (сети и службы) - переход к использованию стандартных сетевых технологий и протоколов. Службы сетевого управления, защиты и управления доступом, мониторинга транзакций, передачи почтовых сообщений, сканирования доступных ресурсов (процессов) могут выполняться независимо от кода целевой программы SCADA, разработанной другим вендором.
4. Real-Time Services (службы реального времени) - освобождение MTU от нагрузки перечисленных выше компонентов дает возможность сконцентрироваться на требованиях производительности для задач реального и квази-реального времени. Данные службы представляют собой быстродействующие процессоры, которые управляют обменом информацией с RTU и SCADA-процессами, осуществляют управление резидентной частью базы данных, оповещение о событиях, выполняют действия по управлению системой, передачу информации о событиях на интерфейс пользователя (оператора).
[ http://www.mka.ru/?p=41524]Тематики
Синонимы
EN
корпорация Microsoft
Основана 5 сентября 1975г. Биллом Гейтсом (Bill Gates) и Полом Аленом (Paul Allen).
[ http://www.morepc.ru/dict/]Тематики
EN
магнитное запоминающее устройство
—
[Е.С.Алексеев, А.А.Мячев. Англо-русский толковый словарь по системотехнике ЭВМ. Москва 1993]Тематики
EN
магнитостатический
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
максимальная безопасность
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
максимальная надёжность
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
масс-спектрометрия
(по распределению масс на фиксированном детекторе)
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
микроволновый спутник
(J.116).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
микросекунда
мксек
10-6 секунд - 1 миллионная доля секунды.
[ http://www.lexikon.ru/dict/net/index.html]Тематики
Синонимы
EN
многоадресный контроль выборочных значений (функциональная связь)
—
[ ГОСТ Р 54325-2011 (IEC/TS 61850-2:2003)]]Тематики
EN
нормально отключённый выключатель
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999]Тематики
- электротехника, основные понятия
EN
подвижная станция
Станция подвижной службы, предназначенная для работы во время движения или во время остановок в неопределенных пунктах (Регламент радиосвязи Ст.1, п. 11.67).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
послание
(напр. бюджетное в США)
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
расплав соли
(напр. для ядерного реактора)
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
ручное переключение сигнала нормального трафика
(МСЭ-Т G.808.1).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
секция мультиплексирования
Трасса между двумя включенными функциями трассы окончания участка мультиплексирования (МСЭ-T G.803, МСЭ-Т G.798).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
сигнал обслуживания
(МСЭ-T G.709/ Y.1331).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
система мобильной связи
—
[Л.Г.Суменко. Англо-русский словарь по информационным технологиям. М.: ГП ЦНИИС, 2003.]Тематики
EN
хранилище сообщений
(МСЭ-Т Х.440, МСЭ-Т F.400/ Х.400).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
Англо-русский словарь нормативно-технической терминологии > MS
104 aprior information
априорная информация
Информация, которая была получена ранее рассматриваемого момента времени.
Чаще всего таким моментом является проводимый эксперимент. После проведения эксперимента появляется апостериорная информация.
[ http://www.morepc.ru/dict/]
априорная информация
Предварительные данные, представления исследователя, используемые при формировании экономико-математической модели. Их источником могут быть, во-первых, теоретические соображения (например, представление об отрицательной зависимости спроса от цены продукта в функции спроса), во-вторых, предшествующие статистические исследования, в которых уже оценивались некоторые элементы, в том числе параметры будущей модели (например, в функции спроса может использоваться априорная для данной модели оценка эластичности спроса от дохода). В современных условиях, когда накапливаются гигантские массивы информации, ее анализ, классификация и предварительная обработка становятся одним из решающих условий успешности построения и применения экономико-математических моделей.
[ http://slovar-lopatnikov.ru/]Тематики
EN
Англо-русский словарь нормативно-технической терминологии > aprior information
105 prior information
априорная информация
Информация, которая была получена ранее рассматриваемого момента времени.
Чаще всего таким моментом является проводимый эксперимент. После проведения эксперимента появляется апостериорная информация.
[ http://www.morepc.ru/dict/]
априорная информация
Предварительные данные, представления исследователя, используемые при формировании экономико-математической модели. Их источником могут быть, во-первых, теоретические соображения (например, представление об отрицательной зависимости спроса от цены продукта в функции спроса), во-вторых, предшествующие статистические исследования, в которых уже оценивались некоторые элементы, в том числе параметры будущей модели (например, в функции спроса может использоваться априорная для данной модели оценка эластичности спроса от дохода). В современных условиях, когда накапливаются гигантские массивы информации, ее анализ, классификация и предварительная обработка становятся одним из решающих условий успешности построения и применения экономико-математических моделей.
[ http://slovar-lopatnikov.ru/]Тематики
EN
Англо-русский словарь нормативно-технической терминологии > prior information
106 DS
- цифровой стабилизатор
- Релаксация
- расширение спектра по методу прямой последовательности
- распределенное тестирование на одном уровне
- разъединитель
- прямая последовательность
- проектный стандарт
- пораженная секунда
- пароохладитель
- набор данных
- дуплексное разнесение
- динамическое рассеивание
- динамическое переключение
- двухсторонняя дискета
- водосточная труба
- вниз по потоку
- барабанный переключатель
барабанный переключатель
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
двухсторонняя дискета
—
[Е.С.Алексеев, А.А.Мячев. Англо-русский толковый словарь по системотехнике ЭВМ. Москва 1993]Тематики
EN
динамическое переключение
динамическая коммутация
—
[Е.С.Алексеев, А.А.Мячев. Англо-русский толковый словарь по системотехнике ЭВМ. Москва 1993]Тематики
Синонимы
EN
динамическое рассеивание
—
[Е.С.Алексеев, А.А.Мячев. Англо-русский толковый словарь по системотехнике ЭВМ. Москва 1993]Тематики
EN
дуплексное разнесение
(Радио)частотный разнос между соответствующими радиостволами прямого и обратного направлений (МСЭ-R F.746-7).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
набор данных
НАБОР ДАННЫХ (НД)
Идентифицированная совокупность физических записей, организованная одним из установленных в системе обработки данных способов и представляющая файлы или части файлов в среде хранения.
[ ГОСТ 20886-85]
набор данных
Множество элементов данных, объединенных в отдельное целое для решения определенной задачи.
Чаще всего набор данных представляется в виде файла, сообщения либо блока данных.
[Гипертекстовый энциклопедический словарь по информатике Э. Якубайтиса]
[ http://www.morepc.ru/dict/]
набор данных
НД
-
[ ГОСТ Р МЭК 61850-7-2-2009]
НД представляет собой набор ссылок на данные внутри информационной модели устройства. В НД могут быть включены как отдельные атрибуты данных (например, запись PTOC1.Str.general будет соответствовать одному логическому сигналу пуска защиты), так и логические узлы целиком (например PTOC1). Устройства могут поддерживать различное количество наборов данных. Кроме того, устройства могут иметь фиксированные (то есть когда набор данных нельзя изменить) либо конфигурируемые наборы данных. Также возможны различные степени свободы конфигурации наборов данных: изменение данных, изменение наименования и т.п. Использование наборов данных проиллюстрировано на рис. 3. При рассмотрении контроллера присоединения, на который заведены сигналы о положении всех разъединителей и заземлителей рассматриваемого присоединения, в устройстве должны присутствовать логические узлы, соответствующие каждому из аппаратов (в нашем случае – XSWI1...5). Примером набора данных может служить DATASET с наименованием SwitchPositions, включающий в себя элементы данных Pos каждого из указанных логических узлов. В дальнейшем составленный набор данных может использоваться, например, для сохранения событий в журнале при каждом изменении положения коммутационного аппарата (с использованием сервиса Log), отправки отчета о событии (с использованием сервиса Report) либо быстрого сообщения о событии (с использованием сервиса GOOSE). Рис. 3. Использование наборов данных
При описании информационной модели устройства в нотации МЭК 61850-6 для размещения описаний наборов данных используется системный логический узел LLN0. Наличие логического узла LLN0 является обязательным для каждого логического устройства. При этом не в каждом логическом устройстве могут размещаться наборы данных, поэтому при проектировании и наладке коммуникаций по МЭК 61850 требуется внимательно проверять размещение наборов данных в логических устройствах. Информацию о том, в каком логическом устройстве должны размещаться наборы данных,обычно предоставляет производитель в сопроводительной документации. Подробнее информация об этом будет рассмотрена в будущих публикациях, затрагивающих язык конфигурирования SCL, описанный шестой главой стандарта.
[ http://www.news.elteh.ru/arh/2012/77/04.php]
Тематики
- организация данных в сист. обраб. данных
- релейная защита
EN
пароохладитель
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
пораженная секунда
(МСЭ-T G.705).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
проектный стандарт
Проектный стандарт еще не определен окончательно, но уже опубликован. Проектные стандарты CiA неизменны в течение одного года.
[ http://can-cia.com/fileadmin/cia/pdfs/CANdictionary-v2_ru.pdf]Тематики
EN
прямая последовательность
Метод расширения спектра при передаче сигнала, основанный на умножении информационной последовательности на опорный псевдослучайный сигнал с заведомо известными свойствами. При приеме полезная информация выделяется из сигнала известной структуры с помощью алгоритмов свертки.
[Л.М.Невдяев. Мобильная связь 3-го поколения. Москва, 2000 г.]Тематики
EN
разъединитель
Контактный коммутационный аппарат, в разомкнутом положении отвечающий требованиям к функции разъединения.
Примечание.
1 Это определение отличается от формулировки МЭК 60050(441-14-05), поскольку требования к функции разъединения не ограничиваются соблюдением изолирующего промежутка.
[ ГОСТ Р 50030. 1-2000 ( МЭК 60947-1-99)]
2 Разъединитель способен включать и отключать цепь с незначительным током или при незначительном изменении напряжения на зажимах каждого из полюсов разъединителя.
Разъединитель может проводить токи в нормальных условиях работы, а также в течение определенного времени в аномальных условиях работы выдерживать токи короткого замыкания.
[ ГОСТ Р 50030. 3-99 ( МЭК 60947-3-99)] Условное обозначение контакта разъединителя
Условное обозначение контакта разъединителя
разъединитель
Контактный коммутационный аппарат, который обеспечивает в отключенном положении изоляционный промежуток, удовлетворяющий нормированным требованиям.
Примечания
1 Разъединитель способен размыкать и замыкать цепь при малом токе или малом изменении напряжения на выводах каждого из его полюсов. Он также способен проводить токи при нормальных условиях в цепи и проводить в течение нормированного времени токи при ненормальных условиях, таких как короткое замыкание.
2 Малые токи - это такие токи, как емкостные токи вводов, шин, соединений, очень коротких кабелей, токи постоянно соединенных ступенчатых сопротивлений выключателей и токи трансформаторов напряжения и делителей. Для номинальных напряжений до 330 кВ включительно ток, не превышающий 0,5 А, считается малым током по этому определению; для номинального напряжения от 500 кВ и выше и токов, превышающих 0,5 А, необходимо проконсультироваться с изготовителем, если нет особых указаний в руководствах по эксплуатации разъединителей.
3 К малым изменениям напряжения относятся изменения напряжения, возникающие при шунтировании регуляторов индуктивного напряжения или выключателей.
4 Для разъединителей номинальным напряжением от 110 кВ и выше может быть установлена коммутация уравнительных токов.
[ ГОСТ Р 52726-2007]EN
disconnector
a mechanical switching device which provides, in the open position, an isolating distance in accordance with specified requirements
NOTE – A disconnector is capable of opening and closing a circuit when either negligible current is broken or made, or when no significant change in the voltage across the terminals of each of the poles of the disconnector occurs. It is also capable of carrying currents under normal circuit conditions and carrying for a specified time currents under abnormal conditions such as those of short circuit.
[IEV number 441-14-05]
disconnector
IEV 441-14-05 is applicable with the following additional notes:
NOTE 1
"Negligible current" implies currents such as the capacitive currents of bushings, busbars, connections, very short lengths of cable, currents of permanently connected grading impedances of circuit-breakers and currents of voltage transformers and dividers. For rated voltages of 420 kV and below, a current not exceeding 0,5 A is a negligible current for the purpose of this definition; for rated voltage above 420 kV and currents exceeding 0,5 A, the manufacturer should be consulted.
"No significant change in voltage" refers to such applications as the by-passing of induction voltage regulators or circuit-breakers.
NOTE 2
For a disconnector having a rated voltage of 52 kV and above, a rated ability of bus transfer current switching may be assigned
[IEC 62271-102]FR
sectionneur
appareil mécanique de connexion qui assure, en position d'ouverture, une distance de sectionnement satisfaisant à des conditions spécifiées
NOTE – Un sectionneur est capable d'ouvrir et de fermer un circuit lorsqu'un courant d'intensité négligeable est interrompu ou établi, ou bien lorsqu'il ne se produit aucun changement notable de la tension aux bornes de chacun des pôles du sectionneur. Il est aussi capable de supporter des courants dans les conditions normales du circuit et de supporter des courants pendant une durée spécifiée dans des conditions anormales telles que celles du court-circuit.
[IEV number 441-14-05]Указанные в 5.3.2 перечислениях а)-d) устройства отключения ( выключатель-разъединитель, разъединитель или выключатель) должны:
- изолировать электрооборудование от цепей питания и иметь только одно положение ОТКЛЮЧЕНО (изоляция) и одно положение ВКЛЮЧЕНО, четко обозначаемые символами «О» и «I» [МЭК 60417-5008 (DB:2002-10) и МЭК 60417-5007 (DB:2002-10), см. 10.2.2];
- иметь видимое разъединение или индикатор положения, который может указывать положение ОТКЛЮЧЕНО только в случае, если все контакты в действительности открыты, т.е. разомкнуты и удалены друг от друга на расстояние, удовлетворяющее требованиям по изолированию;
- быть снабжены расположенным снаружи ручным приводом (например, ручкой). Исключение для управляемых внешним источником энергии, когда воздействие вручную невозможно при наличии иного внешнего привода. Если внешние приводы не используются для выполнения аварийных функций управления, то рекомендуется применять ЧЕРНЫЙ и СЕРЫЙ цвета для окраски ручного привода (см. 10.7.4 и 10.8.4);
- обладать средствами для запирания в положении ОТКЛЮЧЕНО (например, с помощью висячих замков). При таком запирании возможность как дистанционного, так и местного включения должна быть исключена;
Разъединители служат для создания видимого разрыва, отделяющего выводимое в ремонт оборудование от токоведущих частей, находящихся под напряжением, для безопасного производства работ.
Разъединители не имеют дугогасящих устройств и поэтому предназначаются для включения и отключения электрических цепей при отсутствии тока нагрузки и находящихся только под напряжением или даже без напряжения. Лишь в некоторых случаях допускается включение и отключение разъединителями небольших токов, значительно меньше номинальных.
Разъединители используются также при различного рода переключениях в схемах электрических соединений подстанций, например при переводе присоединений с одной системы шин на другую.
Требования, предъявляемые к разъединителям с точки зрения оперативного обслуживания, следующие:- Разъединители в отключенном положении должны создавать ясно видимый разрыв цепи, соответствующий классу напряжения установки.
- Приводы разъединителей должны иметь устройства фиксации в каждом из двух оперативных положений: включенном и отключенном. Кроме того, они должны иметь надежные упоры, ограничивающие поворот главных ножей на угол больше заданного.
- Опорные изоляторы и изолирующие тяги должны выдерживать механическую нагрузки при операциях.
- Главные ножи разъединителей должны иметь блокировку с ножами стационарных заземлителей и не допускать возможности одновременного включения тех и других.
- Разъединители должны беспрепятственно включаться и отключаться при любых наихудших условиях окружающей среды (например, при обледенении).
- Разъединители должны иметь надлежащую изоляцию, обеспечивающую не только надежную работу при возможных перенапряжениях и ухудшении атмосферных условий (гроза, дождь, туман), но и безопасное обслуживание.
[ http://forca.ru/stati/podstancii/obsluzhivanie-razediniteley-otdeliteley-i-korotkozamykateley.html]
Разъединители применяются для коммутации обесточенных при помощи выключателей участков токоведущих систем, для переключения РУ с одной ветви на другую, а также для отделения на время ревизии или ремонта силового электротехнического оборудования и создания безопасных условий от смежных частей линии, находящихся под напряжением. Разъединители способны размыкать электрическую цепь только при отсутствии в ней тока или при весьма малом токе. В отличие от выключателей разъединители в отключенном состоянии образуют видимый разрыв цепи. После отключения разъединителей с обеих сторон объекта, например выключателя или трансформатора, они должны заземляться с обеих сторон либо при помощи переносных заземлителей, либо специальных заземляющих ножей, встраиваемых в конструкцию разъединителя.
[ http://relay-protection.ru/content/view/46/8/1/1/]
Параллельные тексты EN-RU
b) disconnector, with or without fuses, in accordance with IEC 60947-3, that has an auxiliary contact that in all cases causes switching devices to break the load circuit before the opening of the main contacts of the disconnector;
[IEC 60204-1-2006]
б) разъединитель с или без предохранителей, соответствующий требованиям МЭК 60947-3 со вспомогательным контактом, срабатывающим до того, как разомкнутся главные контакты разъединителя, используемым для коммутации другого аппарата, отключающего питание цепей нагрузки.
[Перевод Интент]
Тематики
- высоковольтный аппарат, оборудование...
- релейная защита
- электротехника, основные понятия
Классификация
>>>EN
- disconnect
- disconnect device
- disconnect switch
- disconnecting device
- disconnecting switch
- disconnector
- DS
- isolating facility
- isolating switch
- isolator
- main disconnect device
DE
FR
Смотри также
распределенное тестирование на одном уровне
Абстрактный метод тестирования, при котором верхний тестер располагается в тестируемой системе, а точка наблюдения и контроля (PCO) находится на верхней границе сервиса (IUT) для тестирования на одном из уровней протокола. Тестовые события описываются в терминах абстрактных примитивов сервиса (ASP) на верхнем уровне над IUT и ASP и/или PDU для нижнего тестера PCO.
[ http://www.lexikon.ru/dict/net/index.html]Тематики
EN
расширение спектра по методу прямой последовательности
Метод формирования широкополосного сигнала, при котором исходный двоичный сигнал преобразуется в псевдослучайную последовательность для манипуляции несущей. В эфир передается шумоподобный сигнал, обладающий всеми свойствами аддитивного белого шума. Расширение спектра сигнала в n раз с использованием DSSS позволяет уменьшить спектральную плотность мощности сигнала во столько же раз (МСЭ-R SM.1055).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
цифровой стабилизатор
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
5. Релаксация Dsrel - разность начального и остаточного напряжений в образце.
Источник: ГОСТ 28334-89: Проволока и канаты стальные для армирования предварительно-напряженных железобетонных конструкций. Метод испытания на релаксацию при постоянной деформации оригинал документа
Англо-русский словарь нормативно-технической терминологии > DS
107 message
- Сообщение данных
- сообщение
- послание
- передаваемый блок информации
- блок данных с управляющей информацией
блок данных с управляющей информацией
—
[Л.Г.Суменко. Англо-русский словарь по информационным технологиям. М.: ГП ЦНИИС, 2003.]Тематики
EN
передаваемый блок информации
—
[Л.Г.Суменко. Англо-русский словарь по информационным технологиям. М.: ГП ЦНИИС, 2003.]Тематики
EN
послание
(напр. бюджетное в США)
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
65. Сообщение данных
Сообщение
Message
Данные, имеющие смысловое содержание и пригодные для обработки или использования пользователем системы телеобработки данных или вычислительной сети
Источник: ГОСТ 24402-88: Телеобработка данных и вычислительные сети. Термины и определения оригинал документа
3.6 сообщение (message): Упорядоченный ряд цифровых состояний в определенных группах, используемый для передачи информации.
[МЭК 61784-3:2007, модифицировано]
Источник: ГОСТ Р МЭК 61500-2012: Атомные станции. Системы контроля и управления, важные для безопасности. Передача данных в системах, выполняющих функции категории А оригинал документа
Англо-русский словарь нормативно-технической терминологии > message
108 MTU
- терминал измерительных приборов
- оконечный блок технического обслуживания
- максимальный размер транспортного блока
- максимальный размер передаваемого блока данных
- максимальный размер передаваемого блока
- максимальный передаваемый модуль данных
- максимальный передаваемый блок
- диспетчерский пункт управления (в SCADA)
- блок магнитной ленты
блок магнитной ленты
—
[Е.С.Алексеев, А.А.Мячев. Англо-русский толковый словарь по системотехнике ЭВМ. Москва 1993]Тематики
EN
диспетчерский пункт управления
диспетчерский пункт
ДП
главный терминал
-
[Интент]Master Terminal Unit (MTU), Master Station (MS) диспетчерский пункт управления (главный терминал); осуществляет обработку данных и управление высокого уровня, как правило, в режиме мягкого (квази-) реального времени; одна из основных функций обеспечение интерфейса между человеком-оператором и системой (HMI, MMI). В зависимости от конкретной системы MTU может быть реализован в самом разнообразном виде от одиночного компьютера с дополнительными устройствами подключения к каналам связи до больших вычислительных систем (мэйнфреймов) и/или объединенных в локальную сеть рабочих станций и серверов. Как правило, и при построении MTU используются различные методы повышения надежности и безопасности работы системы.
Рис. 2. Основные структурные компоненты SCADA-системыГлавной тенденцией развития MTU (диспетчерских пунктов управления) является переход большинства разработчиков SCADA-систем на архитектуру клиент-сервер, состоящую из 4-х функциональных компонентов.
1. User (Operator) Interface (интерфейс пользователя/оператора) исключительно важная составляющая систем SCADA. Для нее характерны
а) стандартизация интерфейса пользователя вокруг нескольких платформ;
б) все более возрастающее влияние Windows NT;
в) использование стандартного графического интерфейса пользователя (GUI);
г) технологии объектно-ориентированного программирования: DDE, OLE, Active X, OPC (OLE for Process Control), DCOM;
д) стандартные средства разработки приложений, наиболее популярные среди которых, Visual Basic for Applications (VBA), Visual C++;
е) появление коммерческих вариантов программного обеспечения класса SCADA/MMI для широкого спектра задач. Объектная независимость позволяет интерфейсу пользователя представлять виртуальные объекты, созданные другими системами. Результат расширение возможностей по оптимизации HMI-интерфейса.
2. Data Management (управление данными) - отход от узкоспециализированных баз данных в сторону поддержки большинства корпоративных реляционных баз данных (Microsoft SQL, Oracle). Функции управления данными и генерации отчетов осуществляются стандартными средствами SQL, 4GL; эта независимость данных изолирует функции доступа и управления данными от целевых задач SCADA, что позволяет легко разрабатывать дополнительные приложения по анализу и управлению данными.
3. Networking & Services (сети и службы) - переход к использованию стандартных сетевых технологий и протоколов. Службы сетевого управления, защиты и управления доступом, мониторинга транзакций, передачи почтовых сообщений, сканирования доступных ресурсов (процессов) могут выполняться независимо от кода целевой программы SCADA, разработанной другим вендором.
4. Real-Time Services (службы реального времени) - освобождение MTU от нагрузки перечисленных выше компонентов дает возможность сконцентрироваться на требованиях производительности для задач реального и квази-реального времени. Данные службы представляют собой быстродействующие процессоры, которые управляют обменом информацией с RTU и SCADA-процессами, осуществляют управление резидентной частью базы данных, оповещение о событиях, выполняют действия по управлению системой, передачу информации о событиях на интерфейс пользователя (оператора).
[ http://www.mka.ru/?p=41524]Тематики
Синонимы
EN
максимальный передаваемый блок
Наибольший блок данных, который может быть передан через данную физическую среду с использованием данного протокола.
[ http://www.lexikon.ru/dict/net/index.html]Тематики
EN
максимальный передаваемый модуль данных
Максимально возможный модуль данных, который можно передать через данную физическую среду. Пример: MTU для Ethernet составляет 1500 байт. См. также fragmentation.
[ http://www.lexikon.ru/dict/net/index.html]Тематики
EN
максимальный размер передаваемого блока
Максимальный размер области полезной нагрузки GFP в октетах (МСЭ-T G.7041/ Y.1303).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
максимальный размер передаваемого блока данных
Максимально возможный модуль данных, который можно передать через данную физическую среду. Пример: MTU для Ethernet составляет 1500 байт. См. также fragmentation.
[ http://www.morepc.ru/dict/]Тематики
EN
максимальный размер транспортного блока
(МСЭ-Т Y.1415).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
оконечный блок технического обслуживания
(МСЭ-Т G.991.2).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
терминал измерительных приборов
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
Англо-русский словарь нормативно-технической терминологии > MTU
109 master station
- телемеханический пункт управления
- пункт управления
- задающая опорная станция
- диспетчерский пункт управления (в SCADA)
- главная станция данных
- главная станция
- ведущая станция
- ведущая опорная наземная передающая станция
ведущая опорная наземная передающая станция
ведущая станция
Опорная наземная передающая станция, по сигналам которой осуществляется синхронизация излучения в системе.
[ ГОСТ 21535-76]Тематики
Синонимы
EN
FR
ведущая станция
Станция, которая синхронизирует весь трафик сети и управляет работой нескольких ведомых (подчиненных) станций. В каждый момент времени в синхронной сети существует только одна ведущая станция, хотя этот статус станции является временным и может изменяться в процессе работы. Ср. slave ~.
[Л.М. Невдяев. Телекоммуникационные технологии. Англо-русский толковый словарь-справочник. Под редакцией Ю.М. Горностаева. Москва, 2002]Тематики
- электросвязь, основные понятия
EN
главная станция
Приемо-передающая станция, передатчик которой синхронизируется непосредственного главным генератором, но синхронизация приемного оборудования выполняется, как правило, по принимаемому сигналу (МСЭ-R F.342-2).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
главная станция данных
главная станция
Станция звена данных, имеющая в данный момент право на передачу данных к одной или нескольким зависимым станциям.
Примечание
В любой заданный момент времени в звене данных может быть только одна главная станция.
[ ГОСТ 24402-88]Тематики
Синонимы
EN
диспетчерский пункт управления
диспетчерский пункт
ДП
главный терминал
-
[Интент]Master Terminal Unit (MTU), Master Station (MS) диспетчерский пункт управления (главный терминал); осуществляет обработку данных и управление высокого уровня, как правило, в режиме мягкого (квази-) реального времени; одна из основных функций обеспечение интерфейса между человеком-оператором и системой (HMI, MMI). В зависимости от конкретной системы MTU может быть реализован в самом разнообразном виде от одиночного компьютера с дополнительными устройствами подключения к каналам связи до больших вычислительных систем (мэйнфреймов) и/или объединенных в локальную сеть рабочих станций и серверов. Как правило, и при построении MTU используются различные методы повышения надежности и безопасности работы системы.
Рис. 2. Основные структурные компоненты SCADA-системыГлавной тенденцией развития MTU (диспетчерских пунктов управления) является переход большинства разработчиков SCADA-систем на архитектуру клиент-сервер, состоящую из 4-х функциональных компонентов.
1. User (Operator) Interface (интерфейс пользователя/оператора) исключительно важная составляющая систем SCADA. Для нее характерны
а) стандартизация интерфейса пользователя вокруг нескольких платформ;
б) все более возрастающее влияние Windows NT;
в) использование стандартного графического интерфейса пользователя (GUI);
г) технологии объектно-ориентированного программирования: DDE, OLE, Active X, OPC (OLE for Process Control), DCOM;
д) стандартные средства разработки приложений, наиболее популярные среди которых, Visual Basic for Applications (VBA), Visual C++;
е) появление коммерческих вариантов программного обеспечения класса SCADA/MMI для широкого спектра задач. Объектная независимость позволяет интерфейсу пользователя представлять виртуальные объекты, созданные другими системами. Результат расширение возможностей по оптимизации HMI-интерфейса.
2. Data Management (управление данными) - отход от узкоспециализированных баз данных в сторону поддержки большинства корпоративных реляционных баз данных (Microsoft SQL, Oracle). Функции управления данными и генерации отчетов осуществляются стандартными средствами SQL, 4GL; эта независимость данных изолирует функции доступа и управления данными от целевых задач SCADA, что позволяет легко разрабатывать дополнительные приложения по анализу и управлению данными.
3. Networking & Services (сети и службы) - переход к использованию стандартных сетевых технологий и протоколов. Службы сетевого управления, защиты и управления доступом, мониторинга транзакций, передачи почтовых сообщений, сканирования доступных ресурсов (процессов) могут выполняться независимо от кода целевой программы SCADA, разработанной другим вендором.
4. Real-Time Services (службы реального времени) - освобождение MTU от нагрузки перечисленных выше компонентов дает возможность сконцентрироваться на требованиях производительности для задач реального и квази-реального времени. Данные службы представляют собой быстродействующие процессоры, которые управляют обменом информацией с RTU и SCADA-процессами, осуществляют управление резидентной частью базы данных, оповещение о событиях, выполняют действия по управлению системой, передачу информации о событиях на интерфейс пользователя (оператора).
[ http://www.mka.ru/?p=41524]Тематики
Синонимы
EN
задающая опорная станция
—
[ http://slovarionline.ru/anglo_russkiy_slovar_neftegazovoy_promyishlennosti/]Тематики
EN
пункт управления
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
телемеханический пункт управления
ПУ
Пункт, с которого осуществляется управление объектами контролируемых телемеханических пунктов и контроль их состояния.
[ ГОСТ 26.005-82]Тематики
- телемеханика, телеметрия
Синонимы
- ПУ
EN
DE
FR
20. Телемеханический пункт управления
ПУ
D. Steuerungsstelle; Warte
E. Master station
F. Poste maître; Poste de conduite
Пункт, с которого осуществляется управление объектами контролируемых телемеханических пунктов и контроль их состояния
Источник: ГОСТ 26.005-82: Телемеханика. Термины и определения оригинал документа
Главная станция
Master station
Станция звена данных, имеющая в данный момент право на передачу данных к одной или нескольким зависимым станциям.
Примечание. В любой заданный момент времени в звене данных может быть только одна главная станция
Источник: ГОСТ 24402-88: Телеобработка данных и вычислительные сети. Термины и определения оригинал документа
Англо-русский словарь нормативно-технической терминологии > master station
110 switch
- переключатель (в программе)
- переключатель
- коммутационный аппарат
- коммутатор (сети и системы связи)
- коммутатор (в вычислительной сети)
- коммутатор
- выключатель
выключатель
Коммутационный электрический аппарат, имеющий два коммутационных положения или состояния и предназначенный для включении и отключения тока.
Примечание. Под выключателем обычно понимают контактный аппарат без самовозврата. В остальных случаях термин должен быть дополнен поясняющими словами, например, «выключатель с самовозвратом», «выключатель тиристорный» и т. д.
[ ГОСТ 17703-72]
выключатель
Контактный коммутационный аппарат, способный включать, проводить и отключать токи при нормальных условиях в цепи, а также включать, проводить в течение нормированного времени и отключать токи при нормированных анормальных условиях в цепи, таких как короткое замыкание.
[ ГОСТ Р 52565-2006]
выключатель
Устройство для включения и отключения тока и напряжения в одной или более электрических цепях.
Примечание. При отсутствии других указаний под понятиями «напряжение» и «ток» подразумевают их среднеквадратичные значения.
[ ГОСТ Р 51324.1-2005]
выключатель
Прибор для включения и отключения электрического оборудования и устройств
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]EN
(on-off) switch
switch for alternatively closing and opening one or more electric circuits
Source: 581-10-01 MOD
[IEV number 151-12-23]FR
interrupteur, m
commutateur destiné à fermer et ouvrir alternativement un ou plusieurs circuits électriques
Source: 581-10-01 MOD
[IEV number 151-12-23]При отключении воздушных и кабельных линий тупикового питания первым рекомендуется отключать выключатель со стороны нагрузки, вторым — со стороны питания.
[РД 153-34.0-20.505-2001]
... так чтобы она с меньшей выдержкой времени отключала выключатели с той стороны, на которой защита отсутствует;
[ПУЭ]
б) блокировка между выключателями нагрузки или разъединителем и заземляющим разъединителем, не позволяющая включать выключатель нагрузки или разъединитель при включенном заземляющем разъединителе и включать заземляющий разъединитель при включенном выключателе нагрузки или разъединителе;
[ ГОСТ 12.2.007.4-75]
Испытания изоляции выключателей и разъединителей должны быть проведены при включенном и отключенном положениях.
[ ГОСТ 1516_1-76]
Выключатели предназначены для оперативной и аварийной коммутации в энергосистемах, т.е. выполнения операций включения и отключения отдельных цепей при ручном или автоматическом управлении. Во включенном состоянии выключатели должны беспрепятственно пропускать токи нагрузки. Характер режима работы этих аппаратов несколько необычен: нормальным для них считается как включенное состояние, когда они обтекаются током нагрузки, так и отключенное, при котором они обеспечивают необходимую электрическую изоляцию между разомкнутыми участками цепи. Коммутация цепи, осуществляемая при переключении выключателя из одного положения в другое, производится нерегулярно, время от времени, а выполнение им специфических требований по отключению возникающего в цепи короткого замыкания чрезвычайно редко. Выключатели должны надежно выполнять свои функции в течение срока службы, находясь в любом из указанных состояний, и одновременно быть всегда готовыми к мгновенному эффективному выполнению любых коммутационных операций, часто после длительного пребывания в неподвижном состоянии. Отсюда следует, что они должны иметь очень высокий коэффициент готовности: при малой продолжительности процессов коммутации (несколько минут в год) должна быть обеспечена постоянная готовность к осуществлению коммутаций.
[ http://relay-protection.ru/content/view/46/8/]Тематики
- выключатель, переключатель
- релейная защита
Действия
Сопутствующие термины
EN
DE
FR
коммутатор
-Коммутатор (англ. Switch) -
в переводе с англ. означает переключатель. Это многопортовое устройство, обеспечивающее высокоскоростную коммутацию пакетов между портами. Встроенное в него программное обеспечение способно самостоятельно анализировать содержимое пересылаемых по сети блоков данных и обеспечивать прямую передачу информации между любыми двумя портами, независимо от всех остальных портов устройства.
Одновременно с разработкой новых, более высокоскоростных технологий передачи данных перед производителями компьютерного оборудования по-прежнему стояла задача найти какие-либо способы увеличения производительности локальных сетей Ethernet старого образца, минимизировав при этом как финансовые затраты на приобретение новых устройств, так и технологические затраты на модернизацию уже имеющейся сети. Поскольку класс 10Base2 был единодушно признан всеми разработчиками "вымирающим", эксперты сосредоточились на технологии 10BaseT. И подходящее решение вскоре было найдено.
Как известно, стандарт Ethernet подразумевает использование алгоритма широковещательной передачи данных. Это означает, что в заголовке любого пересылаемого по сети блока данных присутствует информация о конечном получателе этого блока, и программное обеспечение каждого компьютера локальной сети, принимая такой пакет, всякий раз анализирует его содержимое, пытаясь "выяснить", стоит ли передать данные протоколам более высокого уровня (если принятый блок информации предназначен именно этому компьютеру) или ретранслировать его обратно в сеть (если блок данных направляется на другую машину). Уже одно это заметно замедляет работу всей локальной сети. А если принять во внимание тот факт, что устройства, используемые в качестве центрального модуля локальных сетей с топологией "звезда" - концентраторы (хабы) - обеспечивают не параллельную, а последовательную передачу данных, то мы обнаруживаем еще одно "слабое звено", которое не только снижает скорость всей системы, но и нередко становится причиной "заторов" в случаях, когда, например, на один и тот же узел одновременно отсылается несколько потоков данных от разных компьютеров-отправителей. Если возложить задачу первоначальной сортировки пакетов на хаб, то эту проблему можно было бы частично решить. Это было проделано, и в результате появилось устройство, названное switch, или коммутатор.
Switch полностью заменяет в структуре локальной сети 10BaseT хаб, да и выглядят эти два устройства практически одинаково, однако принцип работы коммутатора имеет целый ряд существенных различий. Основное различие заключается в том, что встроенное в switch программное обеспечение способно самостоятельно анализировать содержимое пересылаемых по сети блоков данных и обеспечивать прямую передачу информации между любыми двумя из своих портов независимо от всех остальных портов устройства.
Эту ситуацию можно проиллюстрировать на простом примере. Предположим, у нас имеется коммутатор, оснащенный 16 портами. К порту 1 подключен компьютер А, который передает некую последовательность данных компьютеру С, присоединенному к 16-му порту. В отличие от хаба, получив этот пакет данных, коммутатор не ретранслирует его по всем имеющимся в его распоряжении портам в надежде, что рано или поздно он достигнет адресата, а проанализировав содержащуюся в пакете информацию, передает его непосредственно на 16-й порт. В то же самое время на порт 9 коммутатора приходит блок данных из другого сегмента локальной сети 10BaseT, подключенного к устройству через собственный хаб. Поскольку этот блок адресован компьютеру В, он сразу отправляется на порт 3, к которому тот присоединен.
Следует понимать, что эти две операции коммутатор выполняет одновременно и независимо друг от друга. Очевидно, что при наличии 16 портов мы можем одновременно направлять через коммутатор 8 пакетов данных, поскольку порты задействуются парами. Таким образом, суммарная пропускная способность данного устройства составит 8 х 10 = 80 Мбит/с, что существенно ускорит работу сети, в то время как на каждом отдельном подключении сохранится стандартное значение 10 Мбит/с. Другими словами, при использовании коммутатора мы уменьшаем время прохождения пакетов через сетевую систему, не увеличивая фактическую скорость соединения.
Итак, в отличие от концентраторов, осуществляющих широковещательную рассылку всех пакетов, принимаемых по любому из портов, коммутаторы передают пакеты только целевому устройству (адресату). В результате уменьшается трафик и повышается общая пропускная способность, а эти два фактора являются критическими с учетом растущих требований к полосе пропускания сети со стороны современных приложений.
Коммутация популярна как простой, недорогой метод повышения доступной полосы пропускания сети. Современные коммутаторы нередко поддерживают такие средства, как назначение приоритетов трафика (что особенно важно при передаче в сети речи или видео), функции управления сетью и управление многоадресной рассылкой.
Приведем некоторые общие характеристики коммутаторов:защита с помощью брандмауэров;- кэширование Web-данных, поддержка высокоскоростных гигабитных соединений;
- расширенные возможности сетевой телефонии;
- защита настольных компьютеров и сетевое управление;
- фильтрация многоадресного трафика для более эффективного использования полосы пропускания при работе с видеотрафиком;
- адаптивная буферизация портов с распределением памяти между буферами портов в реальном времени, обеспечивающая автоматическую оптимизацию производительности в зависимости от сетевого трафика;
- управление потоками на основе стандартов для обеспечения максимальной производительности и минимизации потерь пакетов при большой загрузке сети;
- поддержка объединения каналов для создания единого высокоскоростного канала связи с другим коммутатором или магистральной сетью;
- автоматическое определение полу/полнодуплексного режима на всех портах, обеспечивающее максимальную производительность без ручной настройки;
- порты 10/100 Мбит/с с автоматическим определением скорости передачи для каждого порта автоматически настраиваются на скорость подключенного устройства;
- встроенная система контроля и управления позволяет уполномоченным администраторам осуществлять поиск и устранение неисправностей и настройку стека из любого места;
- поддержка отказоустойчивых соединений, а также дополнительных резервных блоков питания.
[ http://sharovt.narod.ru/l10.htm]Тематики
EN
коммутатор (сети и системы связи)
Активный сетевой компонент, который соединяет две или несколько подсетей, которые, в свою очередь, могут состоять из сегментов, соединенных повторителями.
Примечание. Коммутаторы устанавливают границы для так называемых областей коллизий. Между сетями, разделенными коммутаторами, коллизии невозможны; пакеты, направляемые на конкретную подсеть, на другие подсети не попадают. Для этого коммутаторы должны знать адреса оборудования подключенных станций. Коллизий в сети можно полностью избежать в том случае, если к порту коммутатора подключен только один активный сетевой компонент.
[ ГОСТ Р 54325-2011 (IEC/TS 61850-2:2003)]EN
switch
active network component. Switches connect two or more sub networks, which themselves could be built of several segments connected by repeaters. Switches establish the borders for so called collision domains. Collisions cannot take place between networks divided by switches, data packets destined to a specific sub network do not appear on the other sub networks. To achieve this, switches must have knowledge of the hardware addresses of the connected stations. In cases where only one active network component is connected to a switch port, collisions on the network can be avoided
[IEC 61850-2, ed. 1.0 (2003-08)]Тематики
EN
коммутационный аппарат
Аппарат, предназначенный для включения или отключения тока в одной или нескольких электрических цепях.
МЭК 60050(441-14-01).
Примечание. Коммутационный аппарат может совершать одну из этих операций или обе
[ ГОСТ Р 50030. 1-2000 ( МЭК 60947-1-99)]
коммутационный аппарат
Электрический аппарат, предназначенный для коммутации электрической цепи и снятия напряжения с части электроустановки (выключатель, выключатель нагрузки, отделитель, разъединитель, автомат, рубильник, пакетный выключатель, предохранитель и т.п.).
[ПОТ Р М-016-2001]
[РД 153-34.0-03.150-00]EN
switching device
a device designed to make or break the current in one or more electric circuits
[IEV number 441-14-01]FR
appareil de connexion
appareil destiné à établir ou à interrompre le courant dans un ou plusieurs circuits électriques
[IEV number 441-14-01]Тематики
- аппарат, изделие, устройство...
EN
DE
FR
переключатель
Контактный коммутационный аппарат, предназначенный для переключения электрических цепей.
[ ГОСТ 17703-72]
переключатель
коммутатор
-
[IEV number 151-12-22]EN
switch
device for changing the electric connections among its terminals
[IEV number 151-12-22]FR
commutateur (1), m
dispositif destiné à modifier les connexions électriques entre ses bornes
[IEV number 151-12-22]Тематики
- аппарат, изделие, устройство...
- выключатель, переключатель
Классификация
>>>EN
- changer
- changerswitch key
- chopper switch
- circuit changer
- interchanging switchswitcher
- switch
- switching key
- switching unit
DE
FR
переключатель (в программе)
Управляемый флажком выбор одного перехода из группы возможных переходов в программе.
[ ГОСТ 19781-90]Тематики
- обеспеч. систем обраб. информ. программное
EN
3.44 коммутатор (switch): Устройство, обеспечивающее возможность соединения сетевых устройств посредством внутренних механизмов коммутации.
Примечание - В отличие от других соединительных устройств локальной сети (например, концентраторов) используемая в коммутаторах технология устанавливает соединения на основе «точка-точка». Это обеспечивает возможность того, чтобы сетевой трафик был виден только адресованным сетевым устройствам, и делает возможным одновременное существование нескольких соединений. Технология коммутации обычно может быть реализована на втором или третьем уровне эталонной модели взаимодействия открытых систем.
Источник: ГОСТ Р ИСО/МЭК 18028-1-2008: Информационная технология. Методы и средства обеспечения безопасности. Сетевая безопасность информационных технологий. Часть 1. Менеджмент сетевой безопасности оригинал документа
3.39 коммутатор (switch): Устройство, обеспечивающее соединение сетевых устройств посредством внутренних механизмов коммутации, с технологией коммутации, обычно реализованной на втором или третьем уровне эталонной модели взаимодействия открытых систем.
Примечание - Коммутаторы отличаются от других соединительных устройств локальной сети (например, концентраторов), так как используемая в коммутаторах технология устанавливает соединения на основе «точка - точка».
Источник: ГОСТ Р ИСО/МЭК 27033-1-2011: Информационная технология. Методы и средства обеспечения безопасности. Безопасность сетей. Часть 1. Обзор и концепции оригинал документа
3.1 выключатель (switch): Устройство для включения и отключения тока и напряжения1) в одной или более электрических цепях.
1) При отсутствии других указаний под понятиями «напряжение» и «ток» подразумевают их среднеквадратичные значения.
Источник: ГОСТ Р 51324.1-2005: Выключатели для бытовых и аналогичных стационарных электрических установок. Часть 1. Общие требования и методы испытаний оригинал документа
72. Переключатель (в программе)
Switch
Управляемый флажком выбор одного перехода из группы возможных переходов в программе
Источник: ГОСТ 19781-90: Обеспечение систем обработки информации программное. Термины и определения оригинал документа
Англо-русский словарь нормативно-технической терминологии > switch
111 demographic models
демографические модели
Математические модели, описывающие процессы воспроизводства и миграции населения. В частности: а) модели, в которых важную роль играет возрастная структура населения — другие его параметры рассматриваются как функции этой структуры («демометрические функции»); б) демографические таблицы (таблицы рождаемости, смертности, плодовитости, количества браков и т.д.); в) модели воспроизводства населения, объединяющие таблицы смертности и плодовитости, которые широко применяются для прогнозных и аналитических расчетов. Для изучения режима воспроизводства населения в зависимости от различных факторов используется также идеализированная модель «стабильного населения». Получаемые с ее помощью данные могут вводиться в экономические модели (например, в модели теории производственных функций).
[ http://slovar-lopatnikov.ru/]Тематики
EN
Англо-русский словарь нормативно-технической терминологии > demographic models
112 master terminal unit
диспетчерский пункт управления
диспетчерский пункт
ДП
главный терминал
-
[Интент]Master Terminal Unit (MTU), Master Station (MS) диспетчерский пункт управления (главный терминал); осуществляет обработку данных и управление высокого уровня, как правило, в режиме мягкого (квази-) реального времени; одна из основных функций обеспечение интерфейса между человеком-оператором и системой (HMI, MMI). В зависимости от конкретной системы MTU может быть реализован в самом разнообразном виде от одиночного компьютера с дополнительными устройствами подключения к каналам связи до больших вычислительных систем (мэйнфреймов) и/или объединенных в локальную сеть рабочих станций и серверов. Как правило, и при построении MTU используются различные методы повышения надежности и безопасности работы системы.
Рис. 2. Основные структурные компоненты SCADA-системыГлавной тенденцией развития MTU (диспетчерских пунктов управления) является переход большинства разработчиков SCADA-систем на архитектуру клиент-сервер, состоящую из 4-х функциональных компонентов.
1. User (Operator) Interface (интерфейс пользователя/оператора) исключительно важная составляющая систем SCADA. Для нее характерны
а) стандартизация интерфейса пользователя вокруг нескольких платформ;
б) все более возрастающее влияние Windows NT;
в) использование стандартного графического интерфейса пользователя (GUI);
г) технологии объектно-ориентированного программирования: DDE, OLE, Active X, OPC (OLE for Process Control), DCOM;
д) стандартные средства разработки приложений, наиболее популярные среди которых, Visual Basic for Applications (VBA), Visual C++;
е) появление коммерческих вариантов программного обеспечения класса SCADA/MMI для широкого спектра задач. Объектная независимость позволяет интерфейсу пользователя представлять виртуальные объекты, созданные другими системами. Результат расширение возможностей по оптимизации HMI-интерфейса.
2. Data Management (управление данными) - отход от узкоспециализированных баз данных в сторону поддержки большинства корпоративных реляционных баз данных (Microsoft SQL, Oracle). Функции управления данными и генерации отчетов осуществляются стандартными средствами SQL, 4GL; эта независимость данных изолирует функции доступа и управления данными от целевых задач SCADA, что позволяет легко разрабатывать дополнительные приложения по анализу и управлению данными.
3. Networking & Services (сети и службы) - переход к использованию стандартных сетевых технологий и протоколов. Службы сетевого управления, защиты и управления доступом, мониторинга транзакций, передачи почтовых сообщений, сканирования доступных ресурсов (процессов) могут выполняться независимо от кода целевой программы SCADA, разработанной другим вендором.
4. Real-Time Services (службы реального времени) - освобождение MTU от нагрузки перечисленных выше компонентов дает возможность сконцентрироваться на требованиях производительности для задач реального и квази-реального времени. Данные службы представляют собой быстродействующие процессоры, которые управляют обменом информацией с RTU и SCADA-процессами, осуществляют управление резидентной частью базы данных, оповещение о событиях, выполняют действия по управлению системой, передачу информации о событиях на интерфейс пользователя (оператора).
[ http://www.mka.ru/?p=41524]Тематики
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > master terminal unit
113 programmable logic controller
контроллер с программируемой логикой
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > programmable logic controller
114 expectation
- ожидание (в сетевом планировании)
- намерения (мн.)
- математическое ожидание
математическое ожидание
—
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]
математическое ожидание
Одна из численных характеристик случайной величины, часто называемая ее теоретической средней. Для дискретной случайной величины X математическое ожидание равно сумме произведений возможных значений этой величины на их вероятности: Мх= ?хР(х), а для непрерывной случайной величины — интегралу Обозначается обычно: Mx или Ex (в нашем словаре принято первое из этих обозначений). См. также Среднее значение. Математическое программирование [mathematical programming] - (см. также Оптимальное программирование) — раздел математики, который «… изучает методы решения задач на нахождение экстремума функций (показателя качества решения) при ограничениях в форме уравнений и неравенств»[1]. Оно объединяет различные математические методы и дисциплины исследования операций: линейное программирование, нелинейное программирование, динамическое программирование, выпуклое программирование, геометрическое программирование, целочисленное программирование и др. Общая задача М.п. состоит в нахождении оптимального (максимального или минимального) значения целевой функции, причем значения переменных должны принадлежать некоторой области допустимых значений (см. Область допустимых решений). В самом общем виде задача записывается так: U = f(x) ? max; x ? M, где x = (x1, x2,…, xn); M — область допустимых значений переменных x1,…, xn; f(x) — целевая функция. Частный случай задачи М.п. — «классическая задача». В ней область M представлена равенствами: g(x) = b, где g(x) — вектор функций ограничений, b — вектор констант ограничений. Названные выше разнообразные дисциплины отличаются друг от друга видом целевой функции f(x) и области М. Например, если f(x) и M — линейны, имеем задачу линейного программирования; если же дополнительно ставится условие, чтобы переменные были целочисленны, имеем задачу целочисленного программирования; если зависимость U от x (т.е. форма f) носит нелинейный характер — задачу нелинейного программирования. Развивающаяся область — стохастическое программирование, задачи которого в отличие от детерминированных характеризуются тем, что их исходные данные (все или часть) — суть случайные величины. [1] Математический аппарат экономического моделирования. М.: “Наука”, 1983, стр 8.
[ http://slovar-lopatnikov.ru/]Тематики
- экономика
- электросвязь, основные понятия
EN
намерения (мн.)
стремления (мн.)
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
Синонимы
- стремления (мн.)
EN
ожидание
В сетевом планировании - процесс, требующий расхода времени без затрат ресурсов
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]Тематики
- сетевое планирование, моделирование
EN
DE
FR
Англо-русский словарь нормативно-технической терминологии > expectation
115 expected value
математическое ожидание
—
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]
математическое ожидание
Одна из численных характеристик случайной величины, часто называемая ее теоретической средней. Для дискретной случайной величины X математическое ожидание равно сумме произведений возможных значений этой величины на их вероятности: Мх= ?хР(х), а для непрерывной случайной величины — интегралу Обозначается обычно: Mx или Ex (в нашем словаре принято первое из этих обозначений). См. также Среднее значение. Математическое программирование [mathematical programming] - (см. также Оптимальное программирование) — раздел математики, который «… изучает методы решения задач на нахождение экстремума функций (показателя качества решения) при ограничениях в форме уравнений и неравенств»[1]. Оно объединяет различные математические методы и дисциплины исследования операций: линейное программирование, нелинейное программирование, динамическое программирование, выпуклое программирование, геометрическое программирование, целочисленное программирование и др. Общая задача М.п. состоит в нахождении оптимального (максимального или минимального) значения целевой функции, причем значения переменных должны принадлежать некоторой области допустимых значений (см. Область допустимых решений). В самом общем виде задача записывается так: U = f(x) ? max; x ? M, где x = (x1, x2,…, xn); M — область допустимых значений переменных x1,…, xn; f(x) — целевая функция. Частный случай задачи М.п. — «классическая задача». В ней область M представлена равенствами: g(x) = b, где g(x) — вектор функций ограничений, b — вектор констант ограничений. Названные выше разнообразные дисциплины отличаются друг от друга видом целевой функции f(x) и области М. Например, если f(x) и M — линейны, имеем задачу линейного программирования; если же дополнительно ставится условие, чтобы переменные были целочисленны, имеем задачу целочисленного программирования; если зависимость U от x (т.е. форма f) носит нелинейный характер — задачу нелинейного программирования. Развивающаяся область — стохастическое программирование, задачи которого в отличие от детерминированных характеризуются тем, что их исходные данные (все или часть) — суть случайные величины. [1] Математический аппарат экономического моделирования. М.: “Наука”, 1983, стр 8.
[ http://slovar-lopatnikov.ru/]Тематики
- экономика
- электросвязь, основные понятия
EN
ожидаемое значение
—
[Л.Г.Суменко. Англо-русский словарь по информационным технологиям. М.: ГП ЦНИИС, 2003.]Тематики
EN
Англо-русский словарь нормативно-технической терминологии > expected value
116 protocol
- протокол опыта
- протокол обмена
- протокол взаимосвязи
- протокол (в информационных технологиях)
- протокол
- план (программа, алгоритм) действий
- WKS-RDATA:: = ADDRESS PROTOCOL BIT-MAP
план (программа, алгоритм) действий
Описание цели, задач, этапов проведения исследования или программы.
[Англо-русский глоссарий основных терминов по вакцинологии и иммунизации. Всемирная организация здравоохранения, 2009 г.]Тематики
- вакцинология, иммунизация
EN
протокол
Набор правил, соглашений, сигналов и процедур, регламентирующий взаимодействие между двумя устройствами.
[ http://www.morepc.ru/dict/]
протокол
Совокупность определенных правил, регулирующих обмен данными между двумя объектами. Протоколы используются на многих уровнях обмена данными и делятся на аппаратные и программные.
[ http://www.alltso.ru/publ/glossarij_setevoe_videonabljudenie_terminy/1-1-0-34]Тематики
EN
протокол взаимосвязи
протокол
Набор семантических и синтетических правил, определяющий взаимосвязь логических объектов уровня при обмене данными.
[ ГОСТ 24402-88]Тематики
Синонимы
EN
протокол обмена
Совокупность семантических и синтаксических правил, определяющих работу радиоэлектронных средств в процессе их взаимодействия.
[ ГОСТ Р 50304-92 ]Тематики
- системы для сопряж. радиоэлектр. средств интерфейсные
Обобщающие термины
EN
протокол опыта
Последовательная запись хода эксперимента
[ http://www.dunwoodypress.com/148/PDF/Biotech_Eng-Rus.pdf]Тематики
EN
Протокол
Protocol
Набор семантических и синтетических правил, определяющий взаимосвязь логических объектов уровня при обмене данными
Источник: ГОСТ 24402-88: Телеобработка данных и вычислительные сети. Термины и определения оригинал документа
3.7 протокол (protocol): Соглашение о форматах данных, временных последовательностях и устранении ошибок при обмене данными в системах связи.
[МЭК 61158-3-19:2007]
Источник: ГОСТ Р МЭК 61500-2012: Атомные станции. Системы контроля и управления, важные для безопасности. Передача данных в системах, выполняющих функции категории А оригинал документа
3.1.39 протокол (protocol): Набор семантических и синтаксических правил, определяющий поведение взаимодействующих объектов.
5.3.2.1.9. WKS-RDATA:: = ADDRESS PROTOCOL BIT-MAP
ADDRESS
:: = < 32-разрядный адрес IР>
PROTOCOL
:: = 8(Xbit); номер протокола IP
BIT-MAP
:: = *(8(Xbit)); битовая маска
; запись WKS предназначена для описания хорошо известных
; сервисов, поддерживаемых отдельным протоколом на отдельных
; адресах IP
; Битовая маска указывает порт протокола. Первый бит
; соответствует 0-му порту, второй - 1-му и т.д.
; Значения номеров протоколов и портов должны
; соответствовать RFC 1700 [9]
5.3.3. Формат RR в контрольных файлах
Большинство RR занимают единственную строку, хотя возможны строки продолжения с использованием скобок.
Для улучшения читаемости могут быть включены пустые строки.
Начало строки указывает владельца. Если начало строки пустое, тогда владелец предполагается таким же, как и в предыдущей RR. Далее идут TTL, класс и тип.
Более подробно формат RR в контрольном файле описан в п. 6.4.4.
5.3.4. Шаблоны
Имя владельца в записи RR может начинаться с символа «*». Такие RR называются шаблонами. Наиболее часто шаблоны используются для создания зон, которые в свою очередь, используются для перенаправления почты из Internet в некоторую другую почтовую систему. Любое имя, соответствующее шаблону, будет принадлежать такой зоне и обладать определенными свойствами согласно данным, указанным в RR с шаблоном, если только не существует RR, точно соответствующий имени.
Шаблоны не применяются, когда:
- запрос принадлежит другой зоне,
- известно, что существует запрашиваемое имя либо имя между запрашиваемым именем и шаблоном.
Например, если есть RR-шаблон с именем владельца «*.Х» и в данной зоне также содержатся RR, прикрепленные к В.Х, шаблоны будут применяться к запрашиваемому имени Z.X, но не к запрашиваемому имени В.Х, А.В.Х или X.
Символ «*» в запрашиваемом имени не имеет специального значения, но может использоваться для тестирования шаблонов в авторитетной зоне. Запрос с «*» является единственным способом получить ответ, содержащий RR-шаблоны. Результат такого запроса не должен кэшироваться.
Пример использования шаблонов:
Пусть существует большая компания с большой сетью не-ТСР/IP. Эта компания хочет создать почтовый шлюз. Если компания названа Х.СОМ, и шлюз ТСР/IР назван А.Х.СОМ, то в зону СОМ могут быть введены следующие записи RR.
Х.СОМ
MX
10
А.Х.СОМ
*.Х.СОМ
MX
10
А.Х.СОМ
А.Х.СОМ
А
1.2.3.4
А.Х.СОМ
MX
10
А.Х.СОМ
*.А.Х.СОМ
MX
10
А.Х.СОМ
Данные записи будут заставлять сервер на любой запрос MX для любого доменного имени, заканчивающегося Х.СОМ возвращать запись MX RR, указывающую на А.Х.СОМ. Последний шаблон необходим, так как действие первого шаблона перекрывается 4-й строкой.
Источник: РД 45.134-2000: Средства технические телематических служб. Общие технические требования
Англо-русский словарь нормативно-технической терминологии > protocol
117 contingency plan
- план реагирования
- план проведения работ в аварийной ситуации
- план подготовки к аварийной ситуации
- план обеспечения непрерывной работы и восстановления функции
- план действий на случай непредвиденных обстоятельств
- план действий в чрезвычайных обстоятельствах
план действий на случай непредвиденных обстоятельств
Документ, содержащий цели и задачи восстановления непрерывности бизнеса в случае непредвиденных обстоятельств, а также необходимые действия, ресурсы и данные.
[аутсорсингаhttp://www.outsourcing.ru/content/glossary/A/page-1.asp]Тематики
EN
план обеспечения непрерывной работы и восстановления функции
—
[Л.Г.Суменко. Англо-русский словарь по информационным технологиям. М.: ГП ЦНИИС, 2003.]Тематики
EN
план подготовки к аварийной ситуации
План действий, подготовленный для борьбы с разливами нефти.
Примечание
План действий по борьбе с разливами обычно состоит из руководств, разработанных для специфичных промышленных объектов или всего региона с целью увеличения эффективности и скорости операций по очистке в случае разлива нефти и одновременно для защиты мест биологической, социальной и экономической важности.
[ ГОСТ Р 53389-2009]Тематики
Обобщающие термины
EN
план проведения работ в аварийной ситуации
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
план реагирования
Документ, регламентирующий действия нескольких ФНД и/или внешних сторон для управления нештатными ситуациями, происходящими при реализации рисков. Такие планы должны быть разработаны для тестовых мероприятий и на период Игр.
[Департамент лингвистических услуг Оргкомитета «Сочи 2014». Глоссарий терминов]EN
contingency plan
Document that regulates actions of several Fas and/or external parties for management of incidents occuring during risk realization. Contingency plans will be developed for both test events and Games time.
[Департамент лингвистических услуг Оргкомитета «Сочи 2014». Глоссарий терминов]Тематики
EN
3.16 план действий в чрезвычайных обстоятельствах (contingency plan): Порядок действия, который позволяет организации восстановить работу после природного или иного бедствия.
Источник: ГОСТ Р ИСО/ТО 13569-2007: Финансовые услуги. Рекомендации по информационной безопасности
3.16 план действий в чрезвычайных обстоятельствах (contingency plan): Порядок действия, который позволяет организации восстановить работу после природного или иного бедствия.
Источник: ГОСТ Р ИСО ТО 13569-2007: Финансовые услуги. Рекомендации по информационной безопасности
Англо-русский словарь нормативно-технической терминологии > contingency plan
118 programmable controller
программируемый контроллер
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > programmable controller
119 storage-programmable logic controller
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > storage-programmable logic controller
120 terminal bus
промышленная сеть верхнего уровня
коммуникационная сеть верхнего уровня
сеть операторского уровня
Сеть верхнего уровня АСУ ТП.
Сеть передачи данных между операторскими станциями, контроллерами и серверами.
[ http://kazanets.narod.ru/NT_PART2.htm]В данной статье речь пойдет о коммуникационных сетях верхнего уровня, входящих в состав АСУ ТП. Их еще называют сетями операторского уровня, ссылаясь на трехуровневую модель распределенных систем управления.
Сети верхнего уровня служат для передачи данных между контроллерами, серверами и операторскими рабочими станциями. Иногда в состав таких сетей входят дополнительные узлы: центральный сервер архива, сервер промышленных приложений, инженерная станция и т.д. Но это уже опции.
Какие сети используются на верхнем уровне?
В отличие от стандартов полевых шин, здесь особого разнообразия нет. Фактически, большинство сетей верхнего уровня, применяемых в современных АСУ ТП, базируется на стандарте Ethernet (IEEE 802.3) или на его более быстрых вариантах Fast Ethernet и Gigabit Ethernet. При этом, как правило, используется полный стек коммуникационных протоколов TCP/IP. В этом плане сети операторского уровня очень похожи на обычные ЛВС, применяемые в офисных приложениях. Широкое промышленное применение сетей Ethernet обусловлено следующими очевидными моментами:
1. Промышленные сети верхнего уровня объединяют множество операторских станций и серверов, которые в большинстве случаев представляют собой персональные компьютеры. Стандарт Ethernet отлично подходит для организации подобных ЛВС; для этого необходимо снабдить каждый компьютер лишь сетевым адаптером (NIC, network interface card). Коммуникационные модули Ethernet для промышленных контроллеров просты в изготовлении и легки в конфигурировании. Стоит отметить, что многие современные контроллеры уже имеют встроенные интерфейсы для подключения к сетям Ethernet.
2. На рынке существует большой выбор недорого коммуникационного оборудования для сетей Ethernet, в том числе специально адаптированного для промышленного применения.
3. Сети Ethernet обладают большой скоростью передачи данных. Например, стандарт Gigabit Ethernet позволяет передавать данные со скоростью до 1 Gb в секунду при использовании витой пары категории 5. Как будет понятно дальше, большая пропускная способность сети становится чрезвычайно важным моментом для промышленных приложений.
4. Очень частым требованием является возможность состыковки сети АСУ ТП с локальной сетью завода (или предприятия). Как правило, существующая ЛВС завода базируется на стандарте Ethernet. Использование единого сетевого стандарта позволяет упростить интеграцию АСУ ТП в общую сеть предприятия, что становится особенно ощутимым при реализации и развертывании систем верхнего уровня типа MES (Мanufacturing Еxecution System).
Однако у промышленных сетей верхнего уровня есть своя специфика, обусловленная условиями промышленного применения. Типичными требованиями, предъявляемыми к таким сетям, являются:
1. Большая пропускная способность и скорость передачи данных. Объем трафика напрямую зависит от многих факторов: количества архивируемых и визуализируемых технологических параметров, количества серверов и операторских станций, используемых прикладных приложений и т.д.
В отличие от полевых сетей жесткого требования детерминированности здесь нет: строго говоря, неважно, сколько времени займет передача сообщения от одного узла к другому – 100 мс или 700 мс (естественно, это не важно, пока находится в разумных пределах). Главное, чтобы сеть в целом могла справляться с общим объемом трафика за определенное время. Наиболее интенсивный трафик идет по участкам сети, соединяющим серверы и операторские станции (клиенты). Это связано с тем, что на операторской станции технологическая информация обновляется в среднем раз в секунду, причем передаваемых технологических параметров может быть несколько тысяч. Но и тут нет жестких временных ограничений: оператор не заметит, если информация будет обновляться, скажем, каждые полторы секунды вместо положенной одной. В то же время если контроллер (с циклом сканирования в 100 мс) столкнется с 500-милисекундной задержкой поступления новых данных от датчика, это может привести к некорректной отработке алгоритмов управления.
2. Отказоустойчивость. Достигается, как правило, путем резервирования коммуникационного оборудования и линий связи по схеме 2*N так, что в случае выхода из строя коммутатора или обрыва канала, система управления способна в кратчайшие сроки (не более 1-3 с) локализовать место отказа, выполнить автоматическую перестройку топологии и перенаправить трафик на резервные маршруты. Далее мы более подробно остановимся на схемах обеспечения резервирования.
3. Соответствие сетевого оборудования промышленным условиям эксплуатации. Под этим подразумеваются такие немаловажные технические меры, как: защита сетевого оборудования от пыли и влаги; расширенный температурный диапазон эксплуатации; увеличенный цикл жизни; возможность удобного монтажа на DIN-рейку; низковольтное питание с возможностью резервирования; прочные и износостойкие разъемы и коннекторы. По функционалу промышленное сетевое оборудование практически не отличается от офисных аналогов, однако, ввиду специального исполнения, стоит несколько дороже.
Рис. 1. Промышленные коммутаторы SCALANCE X200 производства Siemens (слева) и LM8TX от Phoenix Contact (справа): монтаж на DIN-рейку; питание от 24 VDC (у SCALANCE X200 возможность резервирования питания); поддержка резервированных сетевых топологий.Говоря о промышленных сетях, построенных на базе технологии Ethernet, часто используют термин Industrial Ethernet, намекая тем самым на их промышленное предназначение. Сейчас ведутся обширные дискуссии о выделении Industrial Ethernet в отдельный промышленный стандарт, однако на данный момент Industrial Ethernet – это лишь перечень технических рекомендации по организации сетей в производственных условиях, и является, строго говоря, неформализованным дополнением к спецификации физического уровня стандарта Ethernet.
Есть и другая точка зрения на то, что такое Industrial Ethernet. Дело в том, что в последнее время разработано множество коммуникационных протоколов, базирующихся на стандарте Ethernet и оптимизированных для передачи критичных ко времени данных. Такие протоколы условно называют протоколами реального времени, имея в виду, что с их помощью можно организовать обмен данными между распределенными приложениями, которые критичны ко времени выполнения и требуют четкой временной синхронизации. Конечная цель – добиться относительной детерминированности при передаче данных. В качестве примера Industrial Ethernet можно привести:
1. Profinet;
2. EtherCAT;
3. Ethernet Powerlink;
4. Ether/IP.
Эти протоколы в различной степени модифицируют стандартный стек TCP/IP, добавляя в него новые алгоритмы сетевого обмена, диагностические функции, методы самокорректировки и функции синхронизации, оставляя при этом канальный и физический уровни Ethernet неизменными. Это позволяет использовать новые протоколы передачи данных в существующих сетях Ethernet с использованием стандартного коммуникационного оборудования.
Теперь рассмотрим конкретные конфигурации сетей операторского уровня.
На рисунке 2 показана самая простая – базовая конфигурация. Отказ любого коммутатора или обрыв канала связи ( link) ведет к нарушению целостности всей системы. Единичная точка отказа изображена на рисунке красным крестиком.
Рис. 2. Нерезервированная конфигурация сети верхнего уровняТакая простая конфигурация подходит лишь для систем управления, внедряемых на некритичных участках производства (водоподготовка для каких-нибудь водяных контуров или, например, приемка молока на молочном заводе). Для более ответственных технологических участков такое решение явно неудовлетворительно.
На рисунке 3 показана отказоустойчивая конфигурация с полным резервированием. Каждый канал связи и сетевой компонент резервируется. Обратите внимание, сколько отказов переносит система прежде, чем теряется коммуникация с одной рабочей станцией оператора. Но даже это не выводит систему из строя, так как остается в действии вторая, страхующая рабочая станция.
Рис. 3. Полностью резервированная конфигурация сети верхнего уровняРезервирование неизбежно ведет к возникновению петлевидных участков сети – замкнутых маршрутов. Стандарт Ethernet, строго говоря, не допускает петлевидных топологий, так как это может привести к зацикливанию пакетов особенно при широковещательной рассылке. Но и из этой ситуации есть выход. Современные коммутаторы, как правило, поддерживают дополнительный прокол Spanning Tree Protocol (STP, IEEE 802.1d), который позволяет создавать петлевидные маршруты в сетях Ethernet. Постоянно анализируя конфигурацию сети, STP автоматически выстраивает древовидную топологию, переводя избыточные коммуникационные линии в резерв. В случае нарушения целостности построенной таким образом сети (обрыв связи, например), STP в считанные секунды включает в работу необходимые резервные линии, восстанавливая древовидную структуры сети. Примечательно то, что этот протокол не требует первичной настройки и работает автоматически. Есть и более мощная разновидность данного протокола Rapid Spanning Tree Protocol (RSTP, IEEE 802.1w), позволяющая снизить время перестройки сети вплоть до нескольких миллисекунд. Протоколы STP и RSTP позволяют создавать произвольное количество избыточных линий связи и являются обязательным функционалом для промышленных коммутаторов, применяемых в резервированных сетях.
На рисунке 4 изображена резервированная конфигурация сети верхнего уровня, содержащая оптоволоконное кольцо для организации связи между контроллерами и серверами. Иногда это кольцо дублируется, что придает системе дополнительную отказоустойчивость.
Рис. 4. Резервированная конфигурация сети на основе оптоволоконного кольцаМы рассмотрели наиболее типичные схемы построения сетей, применяемых в промышленности. Вместе с тем следует заметить, что универсальных конфигураций сетей попросту не существует: в каждом конкретном случае проектировщик вырабатывает подходящее техническое решение исходя из поставленной задачи и условий применения.
[ http://kazanets.narod.ru/NT_PART2.htm]Тематики
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > terminal bus
СтраницыСм. также в других словарях:
функции уровня присоединения в системе автоматизации подстанции — Функции системы управления подстанцией, которые используют данные одного присоединения и которые выполняются на основном оборудовании этого присоединения, связываясь через логический интерфейс 3 на уровне присоединения и через логические… … Справочник технического переводчика
функции ОАМ на работающей сети — Действия по эксплуатации и техническому обслуживанию (ОАМ), выполняемые без перерыва передачи трафика, в предположении, что данные трафика остаются прозрачными для действий ОАМ. [http://www.iks media.ru/glossary/index.html?glossid=2400324]… … Справочник технического переводчика
данные — 3.4 данные (data): Совокупность значений, присвоенных для основных мер измерений, производных мер измерений и (или) показателей. [ИСО/МЭК 15939:2007] Источник … Словарь-справочник терминов нормативно-технической документации
Функции криминалистики — общие типы решаемых криминалистической наукой задач в аспекте ее социальной функции научного обеспечения борьбы с преступностью. Ф.к. подразделяются на методологическую, объяснительную, синтезирующую и предсказательную. Методологическая Ф.к … Криминалистическая энциклопедия
ФУНКЦИИ ГТК — определены в п. 5 Положения о Государственном таможенном комитете РФ (утверждено Указом Президента РФ от 25 октября 1994 г. № 2014; действует в ред. Указа Президента РФ от 16 сентября 1999 г. № 1235). ГТК в соответствии с возложенными на него… … Энциклопедия российского и международного налогообложения
ПОДКОРКОВЫЕ ФУНКЦИИ — ПОДКОРКОВЫЕ ФУНКЦИИ. Учение о функциях П. образований, развившееся на базе анат. клинических (по преимуществу) сравнительно анатомических и экспериментально физиологических исследований, насчитывает i.e много лет давности и не может считаться за … Большая медицинская энциклопедия
Административный регламент Федеральной службы по экологическому, технологическому и атомному надзору по исполнению государственной функции по регистрации опасных производственных объектов и ведению государственного реестра опасных производственных объектов — Терминология Административный регламент Федеральной службы по экологическому, технологическому и атомному надзору по исполнению государственной функции по регистрации опасных производственных объектов и ведению государственного реестра опасных… … Словарь-справочник терминов нормативно-технической документации
ГОСТ Р МЭК 60880-2010: Атомные электростанции. Системы контроля и управления, важные для безопасности. Программное обеспечение компьютерных систем, выполняющих функции категории А — Терминология ГОСТ Р МЭК 60880 2010: Атомные электростанции. Системы контроля и управления, важные для безопасности. Программное обеспечение компьютерных систем, выполняющих функции категории А оригинал документа: 3.25 N версионное программное… … Словарь-справочник терминов нормативно-технической документации
Криптографические хеш-функции — Хеширование (иногда хэширование, англ. hashing) преобразование входного массива данных произвольной длины в выходную битовую строку фиксированной длины. Такие преобразования также называются хеш функциями или функциями свёртки, а их результаты… … Википедия
Предел функции — x 1 0.841471 0.1 0.998334 0.01 0.999983 Хотя функция (sin x)/x в нуле не определена, когда x приближается к нулю, значение (sin x)/x становится сколь угодно близко к 1. Другими словами, предел функции (sin x)/x при x, стремящемся к … Википедия
ГОСТ Р 53339-2009: Данные пространственные базовые. Общие требования — Терминология ГОСТ Р 53339 2009: Данные пространственные базовые. Общие требования оригинал документа: 3.1.1 базовый пространственный объект: Пространственный объект, пространственные данные о котором являются основой для удостоверения… … Словарь-справочник терминов нормативно-технической документации
 18+© Академик, 2000-2024
18+© Академик, 2000-2024- Обратная связь: Техподдержка, Реклама на сайте
Экспорт словарей на сайты, сделанные на PHP, Joomla, Drupal, WordPress, MODx.
Перевод: со всех языков на все языки
со всех языков на все языки- Со всех языков на:
- Все языки
- Со всех языков на:
- Все языки
- Английский
- Казахский
- Немецкий
- Русский
- Французский