-
1 момент коррекции
Большой англо-русский и русско-английский словарь > момент коррекции
-
2 slaving torque
Большой англо-русский и русско-английский словарь > slaving torque
-
3 slaving torque
-
4 slaving torque
-
5 slaving torque
-
6 erection torque
Englsh-Russian aviation and space dictionary > erection torque
-
7 corrective moment
Космонавтика: момент коррекции -
8 erection braking
Космонавтика: момент коррекции -
9 slaving torque
-
10 torque
torque nмоментairscrew torqueкрутящий момент воздушного винтаazimuth torque motorдвигатель азимутальной коррекцииbrake torqueтормозной моментcounteract the rotor torqueуравновешивать крутящий момент несущего винтаengine torqueкрутящий моментgyroscopic torqueгироскопический моментleveling torque motorдвигатель горизонтальной коррекцииnegative torqueотрицательный крутящий моментnegative torque featheringфлюгирование по отрицательному крутящему моментуnegative torque pickupдатчик отрицательного крутящего моментаnegative torque switchсигнализатор появления отрицательного крутящего момента(на валу двигателя) operating torqueрабочий моментpitch erection torque motorдвигатель продольной коррекцииpositive torque drop autofeatheringавтоматическое флюгирование при падении крутящего моментаpropeller torqueкрутящий момент воздушного винтаpropeller windmill torqueкрутящий момент воздушного винта в режиме авторотацииroll erection torque motorдвигатель поперечной коррекцииroll erection torque switchвыключатель поперечной коррекции(авиагоризонта) rotor torqueкрутящий момент несущего винтаslaving torque motorдвигатель магнитной коррекцииtorque boxкессонtorque linkшлиц-шарнирtorque meterизмеритель крутящего моментаtorque pressure transmitterдатчик измерителя крутящего моментаtorque tubeвал трансмиссииtorque wrenchтарированный ключupper torque linkверхнее звено шлиц-шарнира -
11 time-weighted sound level
3.5 уровень звука с временной коррекцией (time-weighted sound level), дБ: Двадцать десятичных логарифмов отношения данного среднеквадратичного частотно корректированного звукового давления, полученного путем усреднения по времени с заданной функцией временной коррекции, к опорному звуковому давлению.
Примечания
1. Для уровней звука, полученных при временных характеристиках F и S, рекомендуют следующие обозначения: LAF, LAS - для корректированных по A, LCF, LCS - для корректированных по С уровней звука.
2. В национальных стандартах Российской Федерации единицы измерения уровней звука, корректированных по А, обозначают дБА корректированных по С - дБС.
3. При необходимости допускается вместо термина «корректированный по А (или С) уровень звука» применять термин «уровень звука А» (или «уровень звука С»). Например, допустимо словосочетание «корректированный уровень звука А», где слово «корректированный» применяют в ином, по сравнению с указанным в примечании к 3.3 смысле.
4. Корректированный по А уровень звука с временной коррекцией LAt(t) в произвольный момент времени t представляется формулой
 (1)
(1)где t - экспоненциальная постоянная времени для временных характеристик F или S, с;
ξ - переменная интегрирования от некоторого времени в прошлом, которое обозначено -∞ как нижний предел интегрирования, до времени наблюдения t;
pA(ξ) - мгновенное корректированное по А звуковое давление;
р0 - опорное звуковое давление.
В формуле (1) числитель аргумента под знаком логарифма - экспоненциально взвешенное среднеквадратичное корректированное по А звуковое давление в момент наблюдения t.
5. На рисунке 1 представлена последовательность обработки сигнала, описываемая формулой (1).
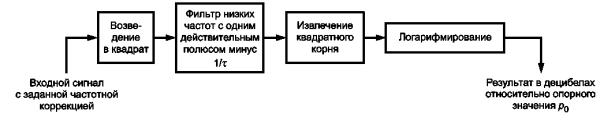
Рисунок 1 - Последовательность обработки сигнала при формировании показаний уровня звука с временной коррекцией
Источник: ГОСТ Р 53188.1-2008: Шумомеры. Часть 1. Технические требования оригинал документа
3.5 уровень звука с временной коррекцией (time-weighted sound level), дБ: Двадцать десятичных логарифмов отношения данного среднеквадратичного частотно-корректированного звукового давления, полученного путем усреднения по времени с заданной функцией временной коррекции, к опорному звуковому давлению.
Примечания
1 Для уровней звука, полученных с временными характеристиками F и S, рекомендуют следующие обозначения: LAF, LAS - для корректированных по A, LCF, LCS - для корректированных по С уровней звука.
2 В межгосударственных стандартах единицы измерения уровней звука, корректированные по А, обозначают дБА, корректированные по С - дБС.
3 При необходимости допускается вместо термина «корректированный по А ( или С) уровень звука» применять термин «уровень звука А» (или «уровень звука С»). Например, допустимо словосочетание «корректированный уровень звука А», где слово «корректированный» применяют в ином, по сравнению с указанным в примечании к 3.3, смысле.
4 Корректированный по А уровень звука с временной коррекцией LAt(t) в произвольный момент времени t представляется формулой
 (1)
(1)где t - экспоненциальная постоянная времени для временных характеристик F или S, с;
x - переменная интегрирования от некоторого времени в прошлом, которое обозначено -¥ как нижний предел интегрирования, до времени наблюдения t;
рА(x) - мгновенное корректированное по А звуковое давление;
р0 - опорное звуковое давление.
В формуле (1) числитель аргумента под знаком логарифма - экспоненциально взвешенное среднеквадратичное корректированное по А звуковое давление в момент наблюдения t.
5 На рисунке 1 представлена последовательность обработки сигнала, описываемая формулой (1).
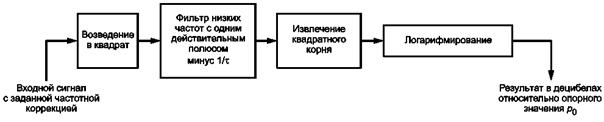
Рисунок 1 - Последовательность обработки сигнала при формировании показаний уровня звука с временной коррекцией
Источник: ГОСТ 17187-2010: Шумомеры. Часть 1. Технические требования оригинал документа
Англо-русский словарь нормативно-технической терминологии > time-weighted sound level
-
12 time-average sound level
3.9 средний по времени уровень звука (time-average sound level), эквивалентный непрерывный уровень звука (equivalent continuous sound level), дБ: Двадцать десятичных логарифмов отношения среднеквадратичного значения звукового давления в течение указанного интервала времени к опорному звуковому давлению, при условии, что звуковое давление получено со стандартной частотной коррекцией.
Примечания
1. Средний по времени корректированный по А уровень звука обозначают LAT или LAeqT и определяют формулой
 (2)
(2)где ξ - переменная интегрирования по интервалу времени усреднения, который заканчивается в момент времени наблюдения t;
Т - интервал времени усреднения;
pA(ξ)- мгновенное корректированное по А звуковое давление;
р0 - опорное звуковое давление.
В формуле (2) числитель аргумента логарифма - линейно взвешенное на интервале времени T среднеквадратичное корректированное по А значение звукового давления.
2. Принципиально, что функция временной коррекции не используется в определении среднего по времени уровня звука.
Источник: ГОСТ Р 53188.1-2008: Шумомеры. Часть 1. Технические требования оригинал документа
3.9 средний по времени уровень звука (time-average sound level), эквивалентный непрерывный уровень звука (equivalent continuous sound level), дБ: Двадцать десятичных логарифмов отношения среднеквадратичного значения звукового давления в течение указанного интервала времени к опорному звуковому давлению при условии, что звуковое давление получено со стандартной частотной коррекцией.
Примечания
1 Средний по времени корректированный по A уровень звука обозначают LATили LAeqT и определяют формулой
 (2)
(2)где x - переменная интегрирования по интервалу времени усреднения, который заканчивается в момент времени наблюдения t;
Т - интервал времени усреднения;
pA(x) - мгновенное корректированное по А звуковое давление;
р0 - опорное звуковое давление.
В формуле (2) числитель аргумента логарифма - линейно взвешенное на интервале времени Т среднеквадратичное корректированное по А значение звукового давления.
2 Принципиально, что функция временной коррекции не используется в определении среднего по времени уровня звука.
Источник: ГОСТ 17187-2010: Шумомеры. Часть 1. Технические требования оригинал документа
Англо-русский словарь нормативно-технической терминологии > time-average sound level
-
13 roll
roll nкренrolling vкренaerial roll filmаэрофотопленкаaerodynamic roll controlуправление креном с помощью аэродинамической поверхностиaerodynamic roll systemаэродинамическая система управления креномaileron rollкрен с помощью элероновaileron rolling effectivenessэффективность элеронов при выполнении кренаaircraft rollкрен воздушного суднаangle of rollугол кренаaxis of rollпродольная осьlanding rollпослепосадочный пробегlanding roll operationпробегrate of rollскорость кренаroll channelканал кренаroll controlуправление по кренуroll control force sensorдатчик усилий по кренуroll control knobручка управления креномroll damperдемпфер кренаroll erection torque motorдвигатель поперечной коррекцииroll erection torque switchвыключатель поперечной коррекции(авиагоризонта) roll gear trainредуктор кренаroll gimbalрамка кренаroll guidanceуправление по кренуrolling momentмомент кренаrolling motionкренrolling resistanceсопротивление движению воздушного суднаrolling stabilityустойчивость по кренуrolling startвзлет без остановки(после выруливания на ВПП) rolling takeoff procedureсхема взлета без остановкиroll instabilityнеустойчивость по кренуroll in the aircraftвводить воздушное судно в кренroll into finalвыходить на посадочную прямуюroll into the turnвходить в разворотroll left on the headingвыходить на курс с левым разворотомroll on the aircraftвыполнять этап пробега воздушного суднаroll on the courseвыводить на заданный курсroll out of the turnвыходить из разворотаroll out on the headingвыходить на заданный курсroll out the aircraftвыводить воздушное судно из кренаroll rate sensorдатчик угловой скорости кренаroll responseреакция по кренуroll right on the headingвыходить на курс с правым разворотомroll sensorдатчик кренаroll synchro transmitterдатчик рассогласования по кренуroll transformerтрансформатор сигнала по кренуtakeoff rollразбег при взлете -
14 pitch
pitch nшагpitching vизменение угла тангажаadjustable pitchизменяемый шагangle of pitchугол тангажаautomatic pitch propellerвоздушный винт с автоматически изменяемым шагомblade pitch scaleшкала углов установки лопастиbraking pitchшаг в режиме торможенияchange the pitchизменять шагcoarse pitchбольшой шагcoarse pitch stopупор большого шага(лопасти воздушного винта) collective pitchобщий шагcollective pitch controlуправление общим шагомcollective pitch control leverручка шаг-газcollective pitch control rodтяга управления общим шагомcollective pitch control systemсистема управления общим шагом(несущего винта) collective pitch indicatorуказатель общего шагаcontrol the pitchуправлять шагомcyclic pitchциклический шагcyclic pitch controlуправление циклическим шагомcyclic pitch control rodтяга управления циклическим шагомcyclic pitch control stickручка продольно-поперечного управления циклическим шагом(несущего винта) cyclic pitch control systemсистема управления циклическим шагом(несущего винта) decrease the pitchуменьшать шагdrag pitchшаг отрицательной тягиeffective pitchэффективный шагelectric propeller pitch controlэлектрическое управление шагом воздушного винтаfeathering pitchшаг во флюгерном положенииfine pitchмалый шагfixed pitchнеизменяемый шагforward pitchшаг положительной тягиhigh pitchбольшой шагhydraulic pitch lockгидравлический упор шагаhydraulic pitch stopгидравлический упор шага(лопасти воздушного винта) hydraulic propeller pitch controlгидравлическое управление шагом воздушного винтаin coarse pitchв режиме большого шагаincrease the pitchувеличивать шагin fine pitchв режиме малого шагаlatch the pitch stopустанавливать на упор шага(лопасти воздушного винта) lateral pitchбоковой кренlower pitch propellerоблегченный воздушный винтlow pitchмалый шагmain rotor pitchшаг несущего винтаmechanical pitch lockмеханический упор шагаno-lift pitchшаг при отсутствии тягиnose-down pitchingпереход на пикированиеnose-up pitchingпереход на кабрированиеnozzle pitch angle variationугловое отклонение соплаpitch angle indicatorуказатель угла тангажаpitch attitudeположение по тангажуpitch autostabilizerавтомат устойчивости по тангажуpitch axisпоперечная осьpitch changeизменение шагаpitch channelканал тангажаpitch command barкомандная стрелка тангажаpitch controlпродольное управлениеpitch control leverручка шагаpitch control systemсистема управления тангажомpitch dampingдемпфирование тангажаpitch erectionвосстановление по тангажуpitch erection torque motorдвигатель продольной коррекцииpitch exitленточная шкалаpitch gimbalрамка тангажаpitching momentмомент тангажаpitching motionдвижение по тангажуpitching stabilityустойчивость по тангажуpitch instabilityнеустойчивость по тангажуpitch limit systemсистема ограничения шага(воздушного винта) pitch lock mechanismмеханизм фиксатора шагаpitch lock passageканал фиксатора шагаpitch reversingреверсирование шагаpitch sensorдатчикpitch stabilityустойчивость по тангажуpitch stiffnessпродольная устойчивостьpitch stopупор шага(лопасти воздушного винта) pitch the nose downwardопускать носpitch transformerпреобразователь сигнала по тангажуpitch trim actuatorмеханизм триммерного эффекта по тангажуpitch trim control knobкремальера тангажаpitch trim scaleшкала корректировки по тангажуpositive pitchположительный уголpropeller pitchшаг воздушного винтаpropeller pitch controlуправление шагом воздушного винтаpropeller pitch control systemл управления шагом воздушного винтаpropeller pitch lockфиксатор шага лопасти воздушного винтаpropeller pitch settingустановка шага лопасти воздушного винтаrate of pitchскорость по тангажуreverse pitchшаг отрицательной тягиrotor pitchшаг несущего винтаseat pitchшаг креселset the propeller pitchустанавливать шаг воздушного винтаthread pitchшаг резьбыtrim for nose-up pitchingкомпенсировать кабрированиеtrim in pitchбалансировать по тангажуunlatch the pitch stopснимать с упора шага(лопасти воздушного винта) variable pitchизменяемый шагvariable pitch propellerвоздушный винт изменяемого шагаzero-thrust pitchшаг при отсутствии тяги -
15 torque generator
датчик момента
Исполнительное устройство системы коррекции, развивающее момент сил, приложенный к ротору гироскопа.
[Сборник рекомендуемых терминов. Выпуск 118. Г ироскопия. Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]Тематики
EN
Англо-русский словарь нормативно-технической терминологии > torque generator
-
16 toxquer
датчик момента
Исполнительное устройство системы коррекции, развивающее момент сил, приложенный к ротору гироскопа.
[Сборник рекомендуемых терминов. Выпуск 118. Г ироскопия. Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]Тематики
EN
Англо-русский словарь нормативно-технической терминологии > toxquer
-
17 feedback
обратная связь
Зависимость текущих воздействий на объект от его состояния, обусловленного предшествующими воздействиями на этот же объект.
Примечания
1. Обратная связь может быть естественной (присущей объекту) или искусственно организуемой.
2. Различают огрицагельную обратную связь и положительную обратную связь как обратную связь, действующую в первом случае в сторону уменьшения, а во втором — в сторону увеличения отклонений текущих значений координат объекта от их предшествующих значений.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]
обратная связь
Воздействие результатов процесса на его протекание.
При обратной связи сигнал на выходе системы воздействует на ее вход. В результате этого он совместно со входным сигналом определяет последующее значение выходного сигнала.
Выделяют два вида обратной связи. Если в результате рассматриваемого воздействия возрастает интенсивность процесса, то обратная связь называется положительной. Если интенсивность уменьшается, то - отрицательной. В системах управления отрицательная обратная связь обеспечивает автоматическое поддержание выбранного параметра. Например, напряжения электрического тока. Если напряжение уменьшается, то обратная связь его увеличивает. Если же оно возрастает, то - уменьшает.
[Гипертекстовый энциклопедический словарь по информатике Э. Якубайтиса]
[ http://www.morepc.ru/dict/]
обратная связь
Важнейшее понятие кибернетики, означающее обратное воздействие результатов управления системой на процесс этого управления, или, иными словами, использование в управлении информации, поступающей от объекта управления. На схеме (рис. O.1) видно, что сигнал, поступивший на вход управляемого блока, преобразуется в нем, и результат подается на выход. Через канал О.с. выход соединен с блоком сравнения, где результат оценивается. Допустим, он меньше, чем требуется, тогда блок регулирования подает сигнал, увеличивающий интенсивность процесса. Наоборот, если результат больше, чем следует, то, получив сигнал от блока регулирования (или коррекции), управляемый процесс затормозится. Это и есть действие О.с. О.с. считается положительной, когда возрастающие результаты процесса усиливают сам процесс, и отрицательной — когда они ослабляют его. Соответственно уменьшающиеся результаты процесса при положительной О.с. ослабляют его, при отрицательной — усиливают. Соединение элементов в систему с О.с. называют «антипараллельным«. Реальные экономические системы управления обычно имеют не один, как на рис. O.1, а множество последовательно и параллельно связанных между собой контуров О.с., использующих разнообразную информацию о состоянии объекта управления. Такие системы называются многоконтурными. Рис. О.1 Контур управления с обратной связью А. — управляющая подсистема, I — блок регулирования, II — блок управления, III- план или стандарт (эталон), IV — управляемая система, процесс, V — измерение на выходе, С — сигнал об отклонении.
[ http://slovar-lopatnikov.ru/]Тематики
- автоматизация, основные понятия
- экономика
EN
обратная связь при передаче данных
обратная связь
ОС
Воздействие по обратному каналу передачи данных на характер передачи в прямом канале.
[ ГОСТ 17657-79 ]Тематики
Обобщающие термины
Синонимы
EN
3.6 обратная связь (feedback): Комментарии, экспертиза и сведения о заинтересованности в продукции или процессе управления претензиями.
Источник: ГОСТ Р ИСО 10002-2007: Менеджмент организации. Удовлетворенность потребителя. Руководство по управлению претензиями в организациях оригинал документа
3.2.4 обратная связь (feedback): Информация, передаваемая пользователю и указывающая на момент активации клавиши или на активированное состояние клавиши.
Источник: ГОСТ Р ИСО 9241-4-2009: Эргономические требования к проведению офисных работ с использованием видеодисплейных терминалов (VDT). Часть 4. Требования к клавиатуре оригинал документа
Англо-русский словарь нормативно-технической терминологии > feedback
-
18 clock synchronization
синхронизация времени
-
[ ГОСТ Р МЭК 60870-5-103-2005]Также нормированы допустимые временные задержки для различных видов сигналов, включая дискретные сигналы, оцифрованные мгновенные значения токов и напряжений, сигналы синхронизации времени и т.п.
[Новости Электротехники №4(76) | СТАНДАРТ МЭК 61850]Широковещательное сообщение, как правило, содержит адрес отправителя и глобальный адрес получателя. Примером широковещательного сообщения служит синхронизация времени.
[ ГОСТ Р 54325-2011 (IEC/TS 61850-2:2003)]Устройства последних поколений дают возможность синхронизации времени с точностью до микросекунд с помощью GPS.
С помощью этого интерфейса сигнал синхронизации времени (от радиоприемника DCF77 сигнал точного времени из Braunschweig, либо от радиоприемника iRiG-B сигнал точного времени глобальной спутниковой системы GPS) может быть передан в терминал для точной синхронизации времени.
[Герхард Циглер. ЦИФРОВАЯ ДИСТАНЦИОННАЯ ЗАЩИТА. ПРИНЦИПЫ И ПРИМЕНЕНИЕ
Перевод с английского ]В том случае если принятое сообщение искажено ( повреждено) в результате неисправности канала связи или в результате потери синхронизации времени, пользователь имеет возможность...
2.13 Синхронизация часов реального времени сигналом по оптовходу
В современных системах релейной защиты зачастую требуется синхронизированная работа часов всех реле в системе для восстановления хронологии работы разных реле.
Это может быть выполнено с использованием сигналов синхронизации времени по интерфейсу IRIG-B, если реле оснащено таким входом или сигналом от системы OP
[Дистанционная защита линии MiCOM P443/ ПРИНЦИП РАБОТЫ]
СИНХРОНИЗАЦИЯ ВРЕМЕНИ СОГЛАСНО СТАНДАРТУ IEEE 1588
Автор: Андреас Дреер (Hirschmann Automation and Control)
Вопрос синхронизации устройств по времени важен для многих распределенных систем промышленной автоматизации. При использовании протокола Precision Time Protocol (PTP), описанного стандартом IEEE 1588, становится возможным выполнение синхронизации внутренних часов устройств, объединенных по сети Ethernet, с погрешностями, не превышающими 1 микросекунду. При этом к вычислительной способности устройств и пропускной способности сети предъявляются относительно низкие требования. В 2008 году была утверждена вторая редакция стандарта (IEEE 1588-2008 – PTP версия 2) с рядом внесенных усовершенствований по сравнению с первой его редакцией.
ЗАЧЕМ НЕОБХОДИМА СИНХРОНИЗАЦИЯ УСТРОЙСТВ ПО ВРЕМЕНИ?
Во многих системах должен производиться отсчет времени. О неявной системе отсчета времени можно говорить тогда, когда в системе отсутствуют часы и ход времени определяется процессами, протекающими в аппаратном и программном обеспечении. Этого оказывается достаточно во многих случаях. Неявная система отсчета времени реализуется, к примеру, передачей сигналов, инициирующих начало отсчета времени и затем выполнение определенных действий, от одних устройств другим.
Система отсчета времени считается явной, если показания времени в ней определяются часами. Указанное необходимо для сложных систем. Таким образом, осуществляется разделение процедур передачи данных о времени и данных о процессе.
Два эффекта должны быть учтены при настройке или синхронизации часов в отдельных устройствах. Первое – показания часов в отдельных устройствах изначально отличаются друг от друга (смещение показаний времени друг относительно друга). Второе – реальные часы не производят отсчет времени с одинаковой скоростью. Таким образом, требуется проводить постоянную корректировку хода самых неточных часов.
Существуют различные способы синхронизации часов в составе отдельных устройств, объединенных в одну информационную сеть. Наиболее известные способы – это использование протокола NTP (Network Time Protocol), а также более простого протокола, который образован от него – протокола SNTP (Simple Network Time Protocol). Данные методы широко распространены для использования в локальных сетях и сети Интернет и позволяют обеспечивать синхронизацию времени с погрешностями в диапазоне миллисекунд. Другой вариант – использование радиосигналов с GPS спутников. Однако при использовании данного способа требуется наличие достаточно дорогих GPS-приемников для каждого из устройств, а также GPS-антенн. Данный способ теоретически может обеспечить высокую точность синхронизации времени, однако материальные затраты и трудозатраты обычно препятствуют реализации такого метода синхронизации.
Другим решением является передача высокоточного временного импульса (например, одного импульса в секунду) каждому отдельному устройству по выделенной линии. Реализация данного метода влечет за собой необходимость создания выделенной линии связи к каждому устройству.
Последним методом, который может быть использован, является протокол PTP (Precision Time Protocol), описанный стандартом IEEE 1588. Протокол был разработан со следующими целями:
- Обеспечение синхронизация времени с погрешностью, не превышающей 1 микросекунды.
-
Предъявление минимальных требований к производительности процессоров устройств и к пропускной способности линии связи, что позволило бы обеспечить реализацию протокола в простых и дешевых устройствах.
- Предъявление невысоких требований к обслуживающему персоналу.
- Возможность использования в сетях Ethernet, а также в других сетях.
- Спецификация его как международного стандарта.
ОБЛАСТИ ПРИМЕНЕНИЯ ПРОТОКОЛА PTP
Протокол PTP может быть применен в различного рода системах. В системах автоматизации, протокол PTP востребован везде, где требуется точная синхронизация устройств по времени. Протокол позволяет синхронизировать устройства в робототехнике или печатной промышленности, в системах осуществляющих обработку бумаги и упаковку продукции и других областях.
В общем и целом в любых системах, где осуществляется измерение тех или иных величин и их сравнение с величинами, измеренными другими устройствами, использование протокола PTP является популярным решением. Системы управления турбинами используют протокол PTP для обеспечения более эффективной работы станций. События, происходящие в различных частях распределенных в пространстве систем, определяются метками точного времени и затем для целей архивирования и анализа осуществляется их передача на центры управления. Геоученые используют протокол PTP для синхронизации установок мониторинга сейсмической активности, удаленных друг от друга на значительные расстояния, что предоставляет возможность более точным образом определять эпицентры землетрясений. В области телекоммуникаций рассматривают возможность использования протокола PTP для целей синхронизации сетей и базовых станций. Также синхронизация времени согласно стандарту IEEE 1588 представляет интерес для разработчиков систем обеспечения жизнедеятельности, систем передачи аудио и видео потоков и может быть использована в военной промышленности.
В электроэнергетике протокол PTPv2 (протокол PTP версии 2) определен для синхронизации интеллектуальных электронных устройств (IED) по времени. Например, при реализации шины процесса, с передачей мгновенных значений тока и напряжения согласно стандарту МЭК 61850-9-2, требуется точная синхронизация полевых устройств по времени. Для реализации систем защиты и автоматики с использованием сети Ethernet погрешность синхронизации данных различных устройств по времени должна лежать в микросекундном диапазоне.
Также для реализации функций синхронизированного распределенного векторного измерения электрических величин согласно стандарту IEEE C37.118, учета, оценки качества электрической энергии или анализа аварийных событий необходимо наличие устройств, синхронизированных по времени с максимальной точностью, для чего может быть использован протокол PTP.
Вторая редакция стандарта МЭК 61850 определяет использование в системах синхронизации времени протокола PTP. Детализация профиля протокола PTP для использования на объектах электроэнергетики (IEEE Standard Profile for Use of IEEE 1588 Precision Time Protocol in Power System Applications) в настоящее время осуществляется рабочей группой комитета по релейной защите и автоматике организации (PSRC) IEEE.
В 2005 году была начата работа по изменению стандарта IEEE1588-2002 с целью расширения возможных областей его применения (телекоммуникации, беспроводная связь и в др.). Результатом работы стало новое издание IEEE1588-2008, которое доступно с марта 2008 со следующими новыми особенностями:
- Усовершенствованные алгоритмы для обеспечения погрешностей в наносекундном диапазоне.
- Повышенное быстродействие синхронизации времени (возможна более частая передача сообщений синхронизации Sync).
- Поддержка новых типов сообщений.
- Ввод однорежимного принципа работы (не требуется передачи сообщений типа FollowUp).
- Ввод поддержки функции т.н. прозрачных часов для предотвращения накопления погрешностей измерения при каскадной схеме соединения коммутаторов.
- Ввод профилей, определяющих настройки для новых областей применения.
- Возможность назначения на такие транспортные механизмы как DeviceNet, PROFInet и IEEE802.3/Ethernet (прямое назначение).
- Ввод структуры TLV (тип, длина, значение) для расширения возможных областей применения стандарта и удовлетворения будущих потребностей.
- Ввод дополнительных опциональных расширений стандарта.
ПРИНЦИП ФУНКЦИОНИРОВАНИЯ СИСТЕМ НА ОСНОВЕ ПРОТОКОЛА PTP
В системах, где используется протокол PTP, различают два вида часов: ведущие часы и ведомые часы. Ведущие часы, в идеале, контролируются либо радиочасами, либо GPS-приемниками и осуществляют синхронизацию ведомых часов. Часы в конечном устройстве, неважно ведущие ли они или ведомые, считаются обычными часами; часы в составе устройств сети, выполняющих функцию передачи и маршрутизации данных (например, в Ethernet-коммутаторах), считаются граничными часами.
Процедура синхронизации согласно протоколу PTP подразделяется на два этапа. На первом этапе осуществляется коррекция разницы показаний времени между ведущими и ведомыми часами – то есть осуществляется так называемая коррекция смещения показаний времени. Для этого ведущее устройство осуществляет передачу сообщения для целей синхронизации времени Sync ведомому устройству (сообщение типа Sync). Сообщение содержит в себе текущее показание времени ведущих часов и его передача осуществляется периодически через фиксированные интервалы времени. Однако поскольку считывание показаний ведущих часов, обработка данных и передача через контроллер Ethernet занимает некоторое время, информация в передаваемом сообщении к моменту его приема оказывается неактуальной. Одновременно с этим осуществляется как можно более точная фиксация момента времени, в который сообщение Sync уходит от отправителя, в составе которого находятся ведущие часы (TM1). Затем ведущее устройство осуществляет передачу зафиксированного момента времени передачи сообщения Sync ведомым устройствам (сообщение FollowUp). Те также как можно точнее осуществляют измерение момента времени приема первого сообщения (TS1) и вычисляют величину, на которую необходимо выполнить коррекцию разницы в показаниях времени между собою и ведущим устройством соответственно (O) (см. рис. 1 и рис. 2). Затем непосредственно осуществляется коррекция показаний часов в составе ведомых устройств на величину смещения. Если задержки в передачи сообщений по сети не было, то можно утверждать, что устройства синхронизированы по времени.
На втором этапе процедуры синхронизации устройств по времени осуществляется определение задержки в передаче упомянутых выше сообщений по сети между устройствами. Указанное выполняется при использовании сообщений специального типа. Ведомое устройство отправляет так называемое сообщение Delay Request (Запрос задержки в передаче сообщения по сети) ведущему устройству и осуществляет фиксацию момента передачи данного сообщения. Ведущее устройство фиксирует момент приема данного сообщения и отправляет зафиксированное значение в сообщении Delay Response (Ответное сообщение с указанием момента приема сообщения). Исходя из зафиксированных времен передачи сообщения Delay Request ведомым устройством и приема сообщения Delay Response ведущим устройством производится оценка задержки в передачи сообщения между ними по сети. Затем производится соответствующая коррекция показаний часов в ведомом устройстве. Однако все упомянутое выше справедливо, если характерна симметричная задержка в передаче сообщения в обоих направлениях между устройствами (то есть характерны одинаковые значения в задержке передачи сообщений в обоих направлениях).
Задержка в передачи сообщения в обоих направлениях будет идентичной в том случае, если устройства соединены между собой по одной линии связи и только. Если в сети между устройствами имеются коммутаторы или маршрутизаторы, то симметричной задержка в передачи сообщения между устройствами не будет, поскольку коммутаторы в сети осуществляют сохранение тех пакетов данных, которые проходят через них, и реализуется определенная очередность их передачи. Эта особенность может, в некоторых случаях, значительным образом влиять на величину задержки в передаче сообщений (возможны значительные отличия во временах передачи данных). При низкой информационной загрузке сети этот эффект оказывает малое влияние, однако при высокой информационной загрузке, указанное может значительным образом повлиять на точность синхронизации времени. Для исключения больших погрешностей был предложен специальный метод и введено понятие граничных часов, которые реализуются в составе коммутаторов сети. Данные граничные часы синхронизируются по времени с часами ведущего устройства. Далее коммутатор по каждому порту является ведущим устройством для всех ведомых устройств, подключенных к его портам, в которых осуществляется соответствующая синхронизация часов. Таким образом, синхронизация всегда осуществляется по схеме точка-точка и характерна практически одинаковая задержка в передаче сообщения в прямом и обратном направлении, а также практическая неизменность этой задержки по величине от одной передачи сообщения к другой.
Хотя принцип, основанный на использовании граничных часов показал свою практическую эффективность, другой механизм был определен во второй версии протокола PTPv2 – механизм использования т. н. прозрачных часов. Данный механизм предотвращает накопление погрешности, обусловленной изменением величины задержек в передаче сообщений синхронизации коммутаторами и предотвращает снижение точности синхронизации в случае наличия сети с большим числом каскадно-соединенных коммутаторов. При использовании такого механизма передача сообщений синхронизации осуществляется от ведущего устройства ведомому, как и передача любого другого сообщения в сети. Однако когда сообщение синхронизации проходит через коммутатор фиксируется задержка его передачи коммутатором. Задержка фиксируется в специальном поле коррекции в составе первого сообщения синхронизации Sync или в составе последующего сообщения FollowUp (см. рис. 2). При передаче сообщений Delay Request и Delay Response также осуществляется фиксация времени задержки их в коммутаторе. Таким образом, реализация поддержки т. н. прозрачных часов в составе коммутаторов позволяет компенсировать задержки, возникающие непосредственно в них.
Если необходимо использование протокола PTP в системе, должен быть реализован стек протокола PTP. Это может быть сделано при предъявлении минимальных требований к производительности процессоров устройств и к пропускной способности сети. Это очень важно для реализации стека протокола в простых и дешевых устройствах. Протокол PTP может быть без труда реализован даже в системах, построенных на дешевых контроллерах (32 бита).
Единственное требование, которое необходимо удовлетворить для обеспечения высокой точности синхронизации, – как можно более точное измерение устройствами момента времени, в который осуществляется передача сообщения, и момента времени, когда осуществляется прием сообщения. Измерение должно производится максимально близко к аппаратной части (например, непосредственно в драйвере) и с максимально возможной точностью. В реализациях исключительно на программном уровне архитектура и производительность системы непосредственно ограничивают максимально допустимую точность.
При использовании дополнительной поддержки аппаратного обеспечения для присвоения меток времени, точность может быть значительным образом повышена и может быть обеспечена ее виртуальная независимость от программного обеспечения. Для этого необходимо использование дополнительной логики, которая может быть реализована в программируемой логической интегральной схеме или специализированной для решения конкретной задачи интегральной схеме на сетевом входе.
Компания Hirschmann – один из первых производителей, реализовавших протокол PTP и оптимизировавших его использование. Компанией был разработан стек, максимально эффективно реализующий протокол, а также чип (программируемая интегральная логическая схема), который обеспечивает высокую точность проводимых замеров.
В системе, в которой несколько обычных часов объединены через Ethernet-коммутатор с функцией граничных часов, была достигнута предельная погрешность +/- 60 нс при практически полной независимости от загрузки сети и загрузки процессора. Также компанией была протестирована система, состоящая из 30 каскадно-соединенных коммутаторов, обладающих функцией поддержки т.н. прозрачных часов и были зафиксированы погрешности менее в пределах +/- 200 нс.
Компания Hirschmann Automation and Control реализовала протоколы PTP версии 1 и версии 2 в промышленных коммутаторах серии MICE, а также в серии монтируемых на стойку коммутаторов MACH100.
Протокол PTP во многих областях уже доказал эффективность своего применения. Можно быть уверенным, что он получит более широкое распространение в течение следующих лет и что многие решения при его использовании смогут быть реализованы более просто и эффективно чем при использовании других технологий.
[ Источник]
Тематики
- релейная защита
- телемеханика, телеметрия
EN
синхронизация по тактам
тактовая синхронизация
—
[Л.Г.Суменко. Англо-русский словарь по информационным технологиям. М.: ГП ЦНИИС, 2003.]Тематики
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > clock synchronization
-
19 time synchronization
синхронизация времени
-
[ ГОСТ Р МЭК 60870-5-103-2005]Также нормированы допустимые временные задержки для различных видов сигналов, включая дискретные сигналы, оцифрованные мгновенные значения токов и напряжений, сигналы синхронизации времени и т.п.
[Новости Электротехники №4(76) | СТАНДАРТ МЭК 61850]Широковещательное сообщение, как правило, содержит адрес отправителя и глобальный адрес получателя. Примером широковещательного сообщения служит синхронизация времени.
[ ГОСТ Р 54325-2011 (IEC/TS 61850-2:2003)]Устройства последних поколений дают возможность синхронизации времени с точностью до микросекунд с помощью GPS.
С помощью этого интерфейса сигнал синхронизации времени (от радиоприемника DCF77 сигнал точного времени из Braunschweig, либо от радиоприемника iRiG-B сигнал точного времени глобальной спутниковой системы GPS) может быть передан в терминал для точной синхронизации времени.
[Герхард Циглер. ЦИФРОВАЯ ДИСТАНЦИОННАЯ ЗАЩИТА. ПРИНЦИПЫ И ПРИМЕНЕНИЕ
Перевод с английского ]В том случае если принятое сообщение искажено ( повреждено) в результате неисправности канала связи или в результате потери синхронизации времени, пользователь имеет возможность...
2.13 Синхронизация часов реального времени сигналом по оптовходу
В современных системах релейной защиты зачастую требуется синхронизированная работа часов всех реле в системе для восстановления хронологии работы разных реле.
Это может быть выполнено с использованием сигналов синхронизации времени по интерфейсу IRIG-B, если реле оснащено таким входом или сигналом от системы OP
[Дистанционная защита линии MiCOM P443/ ПРИНЦИП РАБОТЫ]
СИНХРОНИЗАЦИЯ ВРЕМЕНИ СОГЛАСНО СТАНДАРТУ IEEE 1588
Автор: Андреас Дреер (Hirschmann Automation and Control)
Вопрос синхронизации устройств по времени важен для многих распределенных систем промышленной автоматизации. При использовании протокола Precision Time Protocol (PTP), описанного стандартом IEEE 1588, становится возможным выполнение синхронизации внутренних часов устройств, объединенных по сети Ethernet, с погрешностями, не превышающими 1 микросекунду. При этом к вычислительной способности устройств и пропускной способности сети предъявляются относительно низкие требования. В 2008 году была утверждена вторая редакция стандарта (IEEE 1588-2008 – PTP версия 2) с рядом внесенных усовершенствований по сравнению с первой его редакцией.
ЗАЧЕМ НЕОБХОДИМА СИНХРОНИЗАЦИЯ УСТРОЙСТВ ПО ВРЕМЕНИ?
Во многих системах должен производиться отсчет времени. О неявной системе отсчета времени можно говорить тогда, когда в системе отсутствуют часы и ход времени определяется процессами, протекающими в аппаратном и программном обеспечении. Этого оказывается достаточно во многих случаях. Неявная система отсчета времени реализуется, к примеру, передачей сигналов, инициирующих начало отсчета времени и затем выполнение определенных действий, от одних устройств другим.
Система отсчета времени считается явной, если показания времени в ней определяются часами. Указанное необходимо для сложных систем. Таким образом, осуществляется разделение процедур передачи данных о времени и данных о процессе.
Два эффекта должны быть учтены при настройке или синхронизации часов в отдельных устройствах. Первое – показания часов в отдельных устройствах изначально отличаются друг от друга (смещение показаний времени друг относительно друга). Второе – реальные часы не производят отсчет времени с одинаковой скоростью. Таким образом, требуется проводить постоянную корректировку хода самых неточных часов.
Существуют различные способы синхронизации часов в составе отдельных устройств, объединенных в одну информационную сеть. Наиболее известные способы – это использование протокола NTP (Network Time Protocol), а также более простого протокола, который образован от него – протокола SNTP (Simple Network Time Protocol). Данные методы широко распространены для использования в локальных сетях и сети Интернет и позволяют обеспечивать синхронизацию времени с погрешностями в диапазоне миллисекунд. Другой вариант – использование радиосигналов с GPS спутников. Однако при использовании данного способа требуется наличие достаточно дорогих GPS-приемников для каждого из устройств, а также GPS-антенн. Данный способ теоретически может обеспечить высокую точность синхронизации времени, однако материальные затраты и трудозатраты обычно препятствуют реализации такого метода синхронизации.
Другим решением является передача высокоточного временного импульса (например, одного импульса в секунду) каждому отдельному устройству по выделенной линии. Реализация данного метода влечет за собой необходимость создания выделенной линии связи к каждому устройству.
Последним методом, который может быть использован, является протокол PTP (Precision Time Protocol), описанный стандартом IEEE 1588. Протокол был разработан со следующими целями:
- Обеспечение синхронизация времени с погрешностью, не превышающей 1 микросекунды.
-
Предъявление минимальных требований к производительности процессоров устройств и к пропускной способности линии связи, что позволило бы обеспечить реализацию протокола в простых и дешевых устройствах.
- Предъявление невысоких требований к обслуживающему персоналу.
- Возможность использования в сетях Ethernet, а также в других сетях.
- Спецификация его как международного стандарта.
ОБЛАСТИ ПРИМЕНЕНИЯ ПРОТОКОЛА PTP
Протокол PTP может быть применен в различного рода системах. В системах автоматизации, протокол PTP востребован везде, где требуется точная синхронизация устройств по времени. Протокол позволяет синхронизировать устройства в робототехнике или печатной промышленности, в системах осуществляющих обработку бумаги и упаковку продукции и других областях.
В общем и целом в любых системах, где осуществляется измерение тех или иных величин и их сравнение с величинами, измеренными другими устройствами, использование протокола PTP является популярным решением. Системы управления турбинами используют протокол PTP для обеспечения более эффективной работы станций. События, происходящие в различных частях распределенных в пространстве систем, определяются метками точного времени и затем для целей архивирования и анализа осуществляется их передача на центры управления. Геоученые используют протокол PTP для синхронизации установок мониторинга сейсмической активности, удаленных друг от друга на значительные расстояния, что предоставляет возможность более точным образом определять эпицентры землетрясений. В области телекоммуникаций рассматривают возможность использования протокола PTP для целей синхронизации сетей и базовых станций. Также синхронизация времени согласно стандарту IEEE 1588 представляет интерес для разработчиков систем обеспечения жизнедеятельности, систем передачи аудио и видео потоков и может быть использована в военной промышленности.
В электроэнергетике протокол PTPv2 (протокол PTP версии 2) определен для синхронизации интеллектуальных электронных устройств (IED) по времени. Например, при реализации шины процесса, с передачей мгновенных значений тока и напряжения согласно стандарту МЭК 61850-9-2, требуется точная синхронизация полевых устройств по времени. Для реализации систем защиты и автоматики с использованием сети Ethernet погрешность синхронизации данных различных устройств по времени должна лежать в микросекундном диапазоне.
Также для реализации функций синхронизированного распределенного векторного измерения электрических величин согласно стандарту IEEE C37.118, учета, оценки качества электрической энергии или анализа аварийных событий необходимо наличие устройств, синхронизированных по времени с максимальной точностью, для чего может быть использован протокол PTP.
Вторая редакция стандарта МЭК 61850 определяет использование в системах синхронизации времени протокола PTP. Детализация профиля протокола PTP для использования на объектах электроэнергетики (IEEE Standard Profile for Use of IEEE 1588 Precision Time Protocol in Power System Applications) в настоящее время осуществляется рабочей группой комитета по релейной защите и автоматике организации (PSRC) IEEE.
В 2005 году была начата работа по изменению стандарта IEEE1588-2002 с целью расширения возможных областей его применения (телекоммуникации, беспроводная связь и в др.). Результатом работы стало новое издание IEEE1588-2008, которое доступно с марта 2008 со следующими новыми особенностями:
- Усовершенствованные алгоритмы для обеспечения погрешностей в наносекундном диапазоне.
- Повышенное быстродействие синхронизации времени (возможна более частая передача сообщений синхронизации Sync).
- Поддержка новых типов сообщений.
- Ввод однорежимного принципа работы (не требуется передачи сообщений типа FollowUp).
- Ввод поддержки функции т.н. прозрачных часов для предотвращения накопления погрешностей измерения при каскадной схеме соединения коммутаторов.
- Ввод профилей, определяющих настройки для новых областей применения.
- Возможность назначения на такие транспортные механизмы как DeviceNet, PROFInet и IEEE802.3/Ethernet (прямое назначение).
- Ввод структуры TLV (тип, длина, значение) для расширения возможных областей применения стандарта и удовлетворения будущих потребностей.
- Ввод дополнительных опциональных расширений стандарта.
ПРИНЦИП ФУНКЦИОНИРОВАНИЯ СИСТЕМ НА ОСНОВЕ ПРОТОКОЛА PTP
В системах, где используется протокол PTP, различают два вида часов: ведущие часы и ведомые часы. Ведущие часы, в идеале, контролируются либо радиочасами, либо GPS-приемниками и осуществляют синхронизацию ведомых часов. Часы в конечном устройстве, неважно ведущие ли они или ведомые, считаются обычными часами; часы в составе устройств сети, выполняющих функцию передачи и маршрутизации данных (например, в Ethernet-коммутаторах), считаются граничными часами.
Процедура синхронизации согласно протоколу PTP подразделяется на два этапа. На первом этапе осуществляется коррекция разницы показаний времени между ведущими и ведомыми часами – то есть осуществляется так называемая коррекция смещения показаний времени. Для этого ведущее устройство осуществляет передачу сообщения для целей синхронизации времени Sync ведомому устройству (сообщение типа Sync). Сообщение содержит в себе текущее показание времени ведущих часов и его передача осуществляется периодически через фиксированные интервалы времени. Однако поскольку считывание показаний ведущих часов, обработка данных и передача через контроллер Ethernet занимает некоторое время, информация в передаваемом сообщении к моменту его приема оказывается неактуальной. Одновременно с этим осуществляется как можно более точная фиксация момента времени, в который сообщение Sync уходит от отправителя, в составе которого находятся ведущие часы (TM1). Затем ведущее устройство осуществляет передачу зафиксированного момента времени передачи сообщения Sync ведомым устройствам (сообщение FollowUp). Те также как можно точнее осуществляют измерение момента времени приема первого сообщения (TS1) и вычисляют величину, на которую необходимо выполнить коррекцию разницы в показаниях времени между собою и ведущим устройством соответственно (O) (см. рис. 1 и рис. 2). Затем непосредственно осуществляется коррекция показаний часов в составе ведомых устройств на величину смещения. Если задержки в передачи сообщений по сети не было, то можно утверждать, что устройства синхронизированы по времени.
На втором этапе процедуры синхронизации устройств по времени осуществляется определение задержки в передаче упомянутых выше сообщений по сети между устройствами. Указанное выполняется при использовании сообщений специального типа. Ведомое устройство отправляет так называемое сообщение Delay Request (Запрос задержки в передаче сообщения по сети) ведущему устройству и осуществляет фиксацию момента передачи данного сообщения. Ведущее устройство фиксирует момент приема данного сообщения и отправляет зафиксированное значение в сообщении Delay Response (Ответное сообщение с указанием момента приема сообщения). Исходя из зафиксированных времен передачи сообщения Delay Request ведомым устройством и приема сообщения Delay Response ведущим устройством производится оценка задержки в передачи сообщения между ними по сети. Затем производится соответствующая коррекция показаний часов в ведомом устройстве. Однако все упомянутое выше справедливо, если характерна симметричная задержка в передаче сообщения в обоих направлениях между устройствами (то есть характерны одинаковые значения в задержке передачи сообщений в обоих направлениях).
Задержка в передачи сообщения в обоих направлениях будет идентичной в том случае, если устройства соединены между собой по одной линии связи и только. Если в сети между устройствами имеются коммутаторы или маршрутизаторы, то симметричной задержка в передачи сообщения между устройствами не будет, поскольку коммутаторы в сети осуществляют сохранение тех пакетов данных, которые проходят через них, и реализуется определенная очередность их передачи. Эта особенность может, в некоторых случаях, значительным образом влиять на величину задержки в передаче сообщений (возможны значительные отличия во временах передачи данных). При низкой информационной загрузке сети этот эффект оказывает малое влияние, однако при высокой информационной загрузке, указанное может значительным образом повлиять на точность синхронизации времени. Для исключения больших погрешностей был предложен специальный метод и введено понятие граничных часов, которые реализуются в составе коммутаторов сети. Данные граничные часы синхронизируются по времени с часами ведущего устройства. Далее коммутатор по каждому порту является ведущим устройством для всех ведомых устройств, подключенных к его портам, в которых осуществляется соответствующая синхронизация часов. Таким образом, синхронизация всегда осуществляется по схеме точка-точка и характерна практически одинаковая задержка в передаче сообщения в прямом и обратном направлении, а также практическая неизменность этой задержки по величине от одной передачи сообщения к другой.
Хотя принцип, основанный на использовании граничных часов показал свою практическую эффективность, другой механизм был определен во второй версии протокола PTPv2 – механизм использования т. н. прозрачных часов. Данный механизм предотвращает накопление погрешности, обусловленной изменением величины задержек в передаче сообщений синхронизации коммутаторами и предотвращает снижение точности синхронизации в случае наличия сети с большим числом каскадно-соединенных коммутаторов. При использовании такого механизма передача сообщений синхронизации осуществляется от ведущего устройства ведомому, как и передача любого другого сообщения в сети. Однако когда сообщение синхронизации проходит через коммутатор фиксируется задержка его передачи коммутатором. Задержка фиксируется в специальном поле коррекции в составе первого сообщения синхронизации Sync или в составе последующего сообщения FollowUp (см. рис. 2). При передаче сообщений Delay Request и Delay Response также осуществляется фиксация времени задержки их в коммутаторе. Таким образом, реализация поддержки т. н. прозрачных часов в составе коммутаторов позволяет компенсировать задержки, возникающие непосредственно в них.
Если необходимо использование протокола PTP в системе, должен быть реализован стек протокола PTP. Это может быть сделано при предъявлении минимальных требований к производительности процессоров устройств и к пропускной способности сети. Это очень важно для реализации стека протокола в простых и дешевых устройствах. Протокол PTP может быть без труда реализован даже в системах, построенных на дешевых контроллерах (32 бита).
Единственное требование, которое необходимо удовлетворить для обеспечения высокой точности синхронизации, – как можно более точное измерение устройствами момента времени, в который осуществляется передача сообщения, и момента времени, когда осуществляется прием сообщения. Измерение должно производится максимально близко к аппаратной части (например, непосредственно в драйвере) и с максимально возможной точностью. В реализациях исключительно на программном уровне архитектура и производительность системы непосредственно ограничивают максимально допустимую точность.
При использовании дополнительной поддержки аппаратного обеспечения для присвоения меток времени, точность может быть значительным образом повышена и может быть обеспечена ее виртуальная независимость от программного обеспечения. Для этого необходимо использование дополнительной логики, которая может быть реализована в программируемой логической интегральной схеме или специализированной для решения конкретной задачи интегральной схеме на сетевом входе.
Компания Hirschmann – один из первых производителей, реализовавших протокол PTP и оптимизировавших его использование. Компанией был разработан стек, максимально эффективно реализующий протокол, а также чип (программируемая интегральная логическая схема), который обеспечивает высокую точность проводимых замеров.
В системе, в которой несколько обычных часов объединены через Ethernet-коммутатор с функцией граничных часов, была достигнута предельная погрешность +/- 60 нс при практически полной независимости от загрузки сети и загрузки процессора. Также компанией была протестирована система, состоящая из 30 каскадно-соединенных коммутаторов, обладающих функцией поддержки т.н. прозрачных часов и были зафиксированы погрешности менее в пределах +/- 200 нс.
Компания Hirschmann Automation and Control реализовала протоколы PTP версии 1 и версии 2 в промышленных коммутаторах серии MICE, а также в серии монтируемых на стойку коммутаторов MACH100.
Протокол PTP во многих областях уже доказал эффективность своего применения. Можно быть уверенным, что он получит более широкое распространение в течение следующих лет и что многие решения при его использовании смогут быть реализованы более просто и эффективно чем при использовании других технологий.
[ Источник]
Тематики
- релейная защита
- телемеханика, телеметрия
EN
Англо-русский словарь нормативно-технической терминологии > time synchronization
-
20 Couple (moment) balancing
D. Momentenausgleich
E. Couple (moment) balancing
F. Equilibrage du couple (moment)
Балансировка, при которой определяется и уменьшается главный момент дисбалансов ротора, характеризующий его моментную неуравновешенность.
Примечание. Моментную балансировку проводят не менее чем в двух плоскостях коррекции
Источник: ГОСТ 19534-74: Балансировка вращающихся тел. Термины оригинал документа
Англо-русский словарь нормативно-технической терминологии > Couple (moment) balancing
См. также в других словарях:
Код коррекции ошибок Рида-Соломона — Коды Рида Соломона недвоичные циклические коды, позволяющие исправлять ошибки в блоках данных. Элементами кодового вектора являются не биты, а группы битов (блоки). Очень распространены коды Рида Соломона, работающие с байтами (октетами). Код… … Википедия
Список космических запусков СССР в 1970 году — Список космических запусков СССР в 1970 году: Дата Ракета носитель Полезная нагрузка (тип) Космодром / Стартовый комплекс SCD/NSSDC ID Результат 9 января Восход … Википедия
Зонд-2 — Автоматическая межпланетная станция «Зонд 2» (3МВ) … Википедия
Теория волн Эллиотта — (Elliott Wave Theory) Теория волн Эллиотта это математическая теория об изменении поведения общества или финансовых рынков Все о волновой теории Эллиотта: видео, книги, статьи о теории волн, информация о советниках и индикаторах волн Эллиотта… … Энциклопедия инвестора
ГОСТ 19534-74: Балансировка вращающихся тел. Термины — Терминология ГОСТ 19534 74: Балансировка вращающихся тел. Термины оригинал документа: 2. n опорный ротор D. n Lagerrotor Е. n support rotor Single support rotor F. Rotor a n support Ротор, имеющий n опор Определения термина из разных документов:… … Словарь-справочник терминов нормативно-технической документации
связь — 137 связь Монтажный элемент для временного удержания элементов опалубки Источник: ГОСТ Р 52086 2003: Опалубка. Термины и определения оригинал документа 6. Связь Линейное монтажное приспособление, не обладающее собственной устойчивостью,… … Словарь-справочник терминов нормативно-технической документации
Коррекция — (Correction) Коррекция это неотъемлемая часть трендового движения Коррекция или откат рынка, коррекция на рынке форекс, коррекция или смена тренда Содержание >>>>>>> Коррекция это, определение – это понятие, используемое в , для обозначения … Энциклопедия инвестора
Фильтр Калмана — Фильтр Калмана эффективный рекурсивный фильтр, оценивающий вектор состояния динамической системы, используя ряд неполных и зашумленных измерений. Назван в честь Рудольфа Калмана. Фильтр Калмана широко используется в инженерных и… … Википедия
Masterforex-V — (Мастерфорекс 5) Masterforex V это обучающий интернет проект в области валютного рынка Форекс Разоблачение обучающего проекта Masterforex V, организатор и преподаватели мошеннической академии Мастерфорекс 5, методы обмана клиентов проекта… … Энциклопедия инвестора
Ракета «воздух-поверхность» — Пуск AGM 65 штурмовиком A 10. Ракета «воздух поверхность» («воздух земля») управляемая авиационная ракета, предназначенная для поражения целей … Википедия
Nonfarm Payrolls — (Количество новых рабочих мест вне сельского хозяйства) Nonfarm Payrolls это макроэкономический показатель занятости населения США вне сферы сельского хозяйства Макроэкономический показатель занятости Nonfarm Payrolls, количество рабочих мест вне … Энциклопедия инвестора