-
21 tackle
1. сущ.1) общ. инструмент, принадлежности ( в том числе технические); оборудование, снаряжениеSyn:2) общ. оснастка, лебедка, рыболовные сети, снасти3) сленг провизия, еда-питье4) общ. конская сбруя, упряжь5) общ. блокировка, захват обеих ног, подножка2. гл.1)а) общ. энергично (c усердием) браться, приниматься (за что-л.)б) общ. пытаться найти решение (вопроса, задачи)2) общ. вступать в спор, дискуссию (с кем-л.)3) общ. привязывать, укреплять, закреплять (блоком, веревкой, снастями и т. п.) -
22 interactive problem solving
1) Вычислительная техника: решение задач в интерактивном режиме2) Механика: решение задачи в диалоговом режимеУниверсальный англо-русский словарь > interactive problem solving
-
23 solution
сущ.1. (of) раствор (какого-л. вещества)2. (to, of, for) решение (проблемы, задачи)to find/provide solution to difficulty — найти выход из сложной ситуации
The solution of the problem should be left up to the experts — Решение этой проблемы должно быть оставлено специалистам
My only solution for the problem of habitual accidents … is to stay in bed all day. Even then, there is always the chance that you will fall out. (Robert Benchley)
Англо-русский универсальный дополнительный практический переводческий словарь И. Мостицкого > solution
-
24 Weierstrass theorem
Вейерштрасса теорема
Фундаментальная теорема математического программирования, формулирующая условия существования глобального максимума (см. Максимизация). Заключается в том, что если допустимое множество X является компактным и непустым (см. статью Множество), то непрерывная целевая функция F(x), определенная на этом множестве, достигает глобального максимума на внутренней или граничной точке множества X. При обобщении этой теоремы на случай бесконечномерного пространства (см. Многомерное, n-мерное пространство), можно получить основную теорему существования для задач управления — т.н. обобщенную теорему Вейерштрасса. Согласно этой теореме, решение общей задачи управления существует, если целевой функционал является непрерывным функционалом от функций управления и если подмножество бесконечномерного пространства, к которому принадлежат управления (см. Управление, значение 2), является компактным.
[ http://slovar-lopatnikov.ru/]Тематики
EN
Англо-русский словарь нормативно-технической терминологии > Weierstrass theorem
-
25 decision
принятие решения
—
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
решение
Выбор альтернативы.
[ http://tourlib.net/books_men/meskon_glossary.htm]
решение
(в планировании и управлении, исследовании операций, экономико-математическом моделировании) — 1. Выбор одной или нескольких альтернатив из множества возможных (вариантов Р.). 2. Процесс (алгоритм) осуществления такого выбора. Этот выбор основывается на оценке и сопоставлении ожидаемых результатов принятия тех или иных альтернатив с точки зрения целей (или цели), поставленных в решаемой задаче. Для принятия Р., таким образом, необходимы: четко сформулированная цель; список альтернативных возможностей (стратегий, т.е. вариантов распределения сил и средств и т.д.) и правила выбора между ними, т.е. в общем случае, критерий качества Р.; знание факторов, которые могут повлиять на результат при принятии того или иного Р. В исследовании операций и в целом в экономико-математических методах распространено обоснование Р. не непосредственно (например, путем реального экономического эксперимента), а с помощью экономико-математических моделей. Принято говорить о решении модели, т.е. о выборе такой совокупности значений ее переменных, которая обеспечивает наилучшее по какому-либо критерию значение целевой функции. Как видно, данное выше общее определение относится и к понятию «Р. модели», поскольку оно означает отбор из ряда возможных вариантов (векторов) значений переменных (каждый из них — альтернатива) того варианта, который приводит к лучшему результату. Надо лишь учесть, что поскольку модель не может быть точным отражением действительности, Р. модели не обязательно будет решением реальной задачи; во всяком случае при переходе от модели к действительности нужна дополнительная проверка адекватности Р. Процессы Р. моделей подразделяются на аналитические и численные. Метод аналитического Р. — последовательность математических преобразований, приводящих к заданному результату (например, к формуле, выражающей зависимость экстремального значения функции от ее аргументов). В этом случае численные значения переменных (см. Аналитические методы решения моделей) включаются лишь на последнем этапе. Численные методы получения Р., среди которых наибольшее значение имеют итеративные (см. Численные методы оптимизации), отличаются тем, что в них численные значения переменных участвуют в процессе Р. с самого начала, и на каждом этапе проверяется, соответствуют ли они заданной цели: в случае положительного ответа процесс Р. заканчивается, в случае отрицательного — продолжается. Полученное Р. обычно не является окончательным — изменение условий и целей всегда может поставить вопрос о его корректировке, подстройке. Корректировка (иногда она также называется “управление решением”) — необходимое условие успешного внедрения моделей в практику. Классификация моделей принятия Р. пока не разработана. Есть лишь частичные классификации по отдельным аспектам. Например, а) по степени сложности: простые, принимаемые по одному критерию оценки и выбора альтернатив, и сложные — принимаемые по нескольким критериям; б) по имеющейся информации о возможных результатах: Р., принимаемые в условиях определенности (см. Детерминированные задачи), неопределенности, риска (частичной неопределенности); в) по временному охвату: стратегические и тактические; г) по виду зависимости переменных от времени: статические и динамические; д) по числу лиц, принимающих Р.: индивидуальные и групповые. В последнем случае возникает необходимость согласования индивидуальных Р. (см., например, Теория группового выбора, Согласование плановых решений), различаются также дискретные и непрерывные Р. См. также: Алгоритм управления, Дерево решений, Лицо, принимающее решения, Многошаговые процессы принятия решений, Область допустимых решений, Планово-экономическая задача, Последовательные методы принятия решений, Решение игры, Системы поддержки решений, Теория решений, Экономико-математический анализ решения оптимизационных задач, Экономические решения.
[ http://slovar-lopatnikov.ru/]Тематики
EN
решение (таможни)
Акт индивидуального характера, которым таможенная служба принимает решение по вопросу, предусмотренному таможенным законодательством (Глава 2 Генерального приложения к Пересмотренной Киотской конвенции)
[Упрощение процедур торговли: англо-русский глоссарий терминов (пересмотренное второе издание) НЬЮ-ЙОРК, ЖЕНЕВА, МОСКВА 2011 год]EN
decision
The individual act by which the customs decide upon a matter relating to customs law (General annex, Chapter 2, to the Revised Kyoto Cconvention)
[Trade Facilitation Terms: An English - Russian Glossary (revised second edition) NEW YORK, GENEVA, MOSCOW 2291]Тематики
EN
3.9 решение (decision): Результат выбора между различными направлениями действия.
Источник: ГОСТ Р ИСО 19439-2008: Интеграция предприятия. Основа моделирования предприятия оригинал документа
3.130 решение (decision): Результат выбора между различными направлениями действия.
Источник: ГОСТ Р 54136-2010: Системы промышленной автоматизации и интеграция. Руководство по применению стандартов, структура и словарь оригинал документа
Англо-русский словарь нормативно-технической терминологии > decision
-
26 model solution
решение
Выбор альтернативы.
[ http://tourlib.net/books_men/meskon_glossary.htm]
решение
(в планировании и управлении, исследовании операций, экономико-математическом моделировании) — 1. Выбор одной или нескольких альтернатив из множества возможных (вариантов Р.). 2. Процесс (алгоритм) осуществления такого выбора. Этот выбор основывается на оценке и сопоставлении ожидаемых результатов принятия тех или иных альтернатив с точки зрения целей (или цели), поставленных в решаемой задаче. Для принятия Р., таким образом, необходимы: четко сформулированная цель; список альтернативных возможностей (стратегий, т.е. вариантов распределения сил и средств и т.д.) и правила выбора между ними, т.е. в общем случае, критерий качества Р.; знание факторов, которые могут повлиять на результат при принятии того или иного Р. В исследовании операций и в целом в экономико-математических методах распространено обоснование Р. не непосредственно (например, путем реального экономического эксперимента), а с помощью экономико-математических моделей. Принято говорить о решении модели, т.е. о выборе такой совокупности значений ее переменных, которая обеспечивает наилучшее по какому-либо критерию значение целевой функции. Как видно, данное выше общее определение относится и к понятию «Р. модели», поскольку оно означает отбор из ряда возможных вариантов (векторов) значений переменных (каждый из них — альтернатива) того варианта, который приводит к лучшему результату. Надо лишь учесть, что поскольку модель не может быть точным отражением действительности, Р. модели не обязательно будет решением реальной задачи; во всяком случае при переходе от модели к действительности нужна дополнительная проверка адекватности Р. Процессы Р. моделей подразделяются на аналитические и численные. Метод аналитического Р. — последовательность математических преобразований, приводящих к заданному результату (например, к формуле, выражающей зависимость экстремального значения функции от ее аргументов). В этом случае численные значения переменных (см. Аналитические методы решения моделей) включаются лишь на последнем этапе. Численные методы получения Р., среди которых наибольшее значение имеют итеративные (см. Численные методы оптимизации), отличаются тем, что в них численные значения переменных участвуют в процессе Р. с самого начала, и на каждом этапе проверяется, соответствуют ли они заданной цели: в случае положительного ответа процесс Р. заканчивается, в случае отрицательного — продолжается. Полученное Р. обычно не является окончательным — изменение условий и целей всегда может поставить вопрос о его корректировке, подстройке. Корректировка (иногда она также называется “управление решением”) — необходимое условие успешного внедрения моделей в практику. Классификация моделей принятия Р. пока не разработана. Есть лишь частичные классификации по отдельным аспектам. Например, а) по степени сложности: простые, принимаемые по одному критерию оценки и выбора альтернатив, и сложные — принимаемые по нескольким критериям; б) по имеющейся информации о возможных результатах: Р., принимаемые в условиях определенности (см. Детерминированные задачи), неопределенности, риска (частичной неопределенности); в) по временному охвату: стратегические и тактические; г) по виду зависимости переменных от времени: статические и динамические; д) по числу лиц, принимающих Р.: индивидуальные и групповые. В последнем случае возникает необходимость согласования индивидуальных Р. (см., например, Теория группового выбора, Согласование плановых решений), различаются также дискретные и непрерывные Р. См. также: Алгоритм управления, Дерево решений, Лицо, принимающее решения, Многошаговые процессы принятия решений, Область допустимых решений, Планово-экономическая задача, Последовательные методы принятия решений, Решение игры, Системы поддержки решений, Теория решений, Экономико-математический анализ решения оптимизационных задач, Экономические решения.
[ http://slovar-lopatnikov.ru/]Тематики
EN
Англо-русский словарь нормативно-технической терминологии > model solution
-
27 search problems
задачи поиска
Класс задач исследования операций, состоящих в отыскании наилучшего способа получения такой информации, которая однозначно определила бы решение. Критерием в такой задаче является минимум затрат двух видов: стоимости получения информации и цены ошибки, обусловленной ее использованием. В первом случае речь идет о стоимости выборки, планирование которой сводится к определению способа выбора наблюдений или выбора наблюдаемых объектов, во втором случае — об ошибках двух видов: ошибке выборки (обнаружение того, что в действительности отсутствует) и ошибке наблюдения (пропуск того, что на самом деле имеет место).
[ http://slovar-lopatnikov.ru/]Тематики
EN
Англо-русский словарь нормативно-технической терминологии > search problems
-
28 linear programming
линейное программирование
—
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]
линейное программирование
Область математического программирования, посвященная теории и методам решения экстремальных задач, характеризующихся линейной зависимостью между переменными. В самом общем виде задачу Л.п. можно записать так. Даны ограничения типа или в так называемой канонической форме, к которой можно привести все три указанных случая Требуется найти неотрицательные числа xj (j = 1, 2, …, n), которые минимизируют (или максимизируют) линейную форму Неотрицательность искомых чисел записывается так: Таким образом, здесь представлена общая задача математического программирования с теми оговорками, что как ограничения, так и целевая функция — линейные, а искомые переменные — неотрицательны. Обозначения можно трактовать следующим образом: bi — количество ресурса вида i; m — количество видов этих ресурсов; aij — норма расхода ресурса вида i на единицу продукции вида j; xj — количество продукции вида j, причем таких видов — n; cj — доход (или другой выигрыш) от единицы этой продукции, а в случае задачи на минимум — затраты на единицу продукции; нумерация ресурсов разделена на три части: от 1 до m1, от m1 + 1 до m2 и от m2 + 1 до m в зависимости от того, какие ставятся ограничения на расходование этих ресурсов; в первом случае — «не больше», во втором — «столько же», в третьем — «не меньше»; Z — в случае максимизации, например, объем продукции или дохода, в случае же минимизации — себестоимость, расход сырья и т.п. Добавим еще одно обозначение, оно появится несколько ниже; vi — оптимальная оценка i-го ресурса. Слово «программирование» объясняется здесь тем, что неизвестные переменные, которые отыскиваются в процессе решения задачи, обычно в совокупности определяют программу (план) работы некоторого экономического объекта. Слово, «линейное» отражает факт линейной зависимости между переменными. При этом, как указано, задача обязательно имеет экстремальный характер, т.е. состоит в отыскании экстремума (максимума или минимума) целевой функции. Следует с самого начала предупредить: предпосылка линейности, когда в реальной экономике подавляющее большинство зависимостей носит более сложный нелинейный характер, есть огрубление, упрощение действительности. В некоторых случаях оно достаточно реалистично, в других же выводы, получаемые с помощью решения задач Л.п. оказываются весьма несовершенными. Рассмотрим две задачи Л.п. — на максимум и на минимум — на упрощенных примерах. Предположим, требуется разработать план производства двух видов продукции (объем первого — x1; второго — x2) с наиболее выгодным использованием трех видов ресурсов (наилучшим в смысле максимума общей прибыли от реализации плана). Условия задачи можно записать в виде таблицы (матрицы). Исходя из норм, зафиксированных в таблице, запишем неравенства (ограничения): a11x1 + a12x2 ? bi a21x1 + a22x2 ? b2 a31x1 + a32x2 ? b3 Это означает, что общий расход каждого из трех видов ресурсов не может быть больше его наличия. Поскольку выпуск продукции не может быть отрицательным, добавим еще два ограничения: x1? 0, x2? 0. Требуется найти такие значения x1 и x2, при которых общая сумма прибыли, т.е. величина c1 x1 + c2 x2 будет наибольшей, или короче: Удобно показать условия задачи на графике (рис. Л.2). Рис. Л.2 Линейное программирование, I (штриховкой окантована область допустимых решений) Любая точка здесь, обозначаемая координатами x1 и x2, составляет вариант искомого плана. Очевидно, что, например, все точки, находящиеся в области, ограниченной осями координат и прямой AA, удовлетворяют тому условию, что не может быть израсходовано первого ресурса больше, чем его у нас имеется в наличии (в случае, если точка находится на самой прямой, ресурс используется полностью). Если то же рассуждение отнести к остальным ограничениям, то станет ясно, что всем условиям задачи удовлетворяет любая точка, находящаяся в пределах области, края которой заштрихованы, — она называется областью допустимых решений (или областью допустимых значений, допустимым множеством). Остается найти ту из них, которая даст наибольшую прибыль, т.е. максимум целевой функции. Выбрав произвольно прямую c1x1 + c2x2 = П и обозначив ее MM, находим на чертеже все точки (варианты планов), где прибыль одинакова при любом сочетании x1 и x2 (см. Линия уровня). Перемещая эту линию параллельно ее исходному положению, найдем точку, которая в наибольшей мере удалена от начала координат, однако не вышла за пределы области допустимых значений. (Перемещая линию уровня еще дальше, уже выходим из нее и, следовательно, нарушаем ограничения задачи). Точка M0 и будет искомым оптимальным планом. Она находится в одной из вершин многоугольника. Может быть и такой случай, когда линия уровня совпадает с одной из прямых, ограничивающих область допустимых значений, тогда оптимальным будет любой план, находящийся на соответствующем отрезке. Координаты точки M0 (т.е. оптимальный план) можно найти, решая совместно уравнения тех прямых, на пересечении которых она находится. Противоположна изложенной другая задача Л.п.: поиск минимума функции при заданных ограничениях. Такая задача возникает, например, когда требуется найти наиболее дешевую смесь некоторых продуктов, содержащих необходимые компоненты (см. Задача о диете). При этом известно содержание каждого компонента в единице исходного продукта — aij, ее себестоимость — cj ; задается потребность в искомых компонентах — bi. Эти данные можно записать в таблице (матрице), сходной с той, которая приведена выше, а затем построить уравнения как ограничений, так и целевой функции. Предыдущая задача решалась графически. Рассуждая аналогично, можно построить график (рис. Л.3), каждая точка которого — вариант искомого плана: сочетания разных количеств продуктов x1 и x2. Рис.Л.3 Линейное программирование, II Область допустимых решений здесь ничем сверху не ограничена: нужное количество заданных компонентов тем легче получить, чем больше исходных продуктов. Но требуется найти наиболее выгодное их сочетание. Пунктирные линии, как и в предыдущем примере, — линии уровня. Здесь они соединяют планы, при которых себестоимость смесей исходных продуктов одинакова. Линия, соответствующая наименьшему ее значению при заданных требованиях, — линия MM. Искомый оптимальный план — в точке M0. Приведенные крайне упрощенные примеры демонстрируют основные особенности задачи Л.п. Реальные задачи, насчитывающие много переменных, нельзя изобразить на плоскости — для их геометрической интерпретации используются абстрактные многомерные пространства. При этом допустимое решение задачи — точка в n-мерном пространстве, множество всех допустимых решений — выпуклое множество в этом пространстве (выпуклый многогранник). Задачи Л.п., в которых нормативы (или коэффициенты), объемы ресурсов («константы ограничений«) или коэффициенты целевой функции содержат случайные элементы, называются задачами линейного стохастического программирования; когда же одна или несколько независимых переменных могут принимать только целочисленные значения, то перед нами задача линейного целочисленного программирования. В экономике широко применяются линейно-программные методы решения задач размещения производства (см. Транспортная задача), расчета рационов для скота (см. Задача диеты), наилучшего использования материалов (см. Задача о раскрое), распределения ресурсов по работам, которые надо выполнять (см. Распределительная задача) и т.д. Разработан целый ряд вычислительных приемов, позволяющих решать на ЭВМ задачи линейного программирования, насчитывающие сотни и тысячи переменных, неравенств и уравнений. Среди них наибольшее распространение приобрели методы последовательного улучшения допустимого решения (см. Симплексный метод, Базисное решение), а также декомпозиционные методы решения крупноразмерных задач, методы динамического программирования и др. Сама разработка и исследование таких методов — развитая область вычислительной математики. Один из видов решения имеет особое значение для экономической интерпретации задачи Л.п. Он связан с тем, что каждой прямой задаче Л.п. соответствует другая, симметричная ей двойственная задача (подробнее см. также Двойственность в линейном программировании). Если в качестве прямой принять задачу максимизации выпуска продукции (или объема реализации, прибыли и т.д.), то двойственная задача заключается, наоборот, в нахождении таких оценок ресурсов, которые минимизируют затраты. В случае оптимального решения ее целевая функция — сумма произведений оценки (цены) vi каждого ресурса на его количество bi— то есть равна целевой функции прямой задачи. Эта цена называется объективно обусловленной, или оптимальной оценкой, или разрешающим множителем. Основополагающий принцип Л.п. состоит в том, что в оптимальном плане и при оптимальных оценках всех ресурсов затраты и результаты равны. Оценки двойственной задачи обладают замечательными свойствами: они показывают, насколько возрастет (или уменьшится) целевая функция прямой задачи при увеличении (или уменьшении) запаса соответствующего вида ресурсов на единицу. В частности, чем больше в нашем распоряжении данного ресурса по сравнению с потребностью в нем, тем ниже будет оценка, и наоборот. Не решая прямую задачу, по оценкам ресурсов, полученных в двойственной задаче, можно найти оптимальный план: в него войдут все технологические способы, которые оправдывают затраты, исчисленные в этих оценках (см. Объективно обусловленные (оптимальные) оценки). Первооткрыватель Л.п. — советский ученый, академик, лауреат Ленинской, Государственной и Нобелевской премий Л.В.Канторович. В 1939 г. он решил математически несколько задач: о наилучшей загрузке машин, о раскрое материалов с наименьшими расходами, о распределении грузов по нескольким видам транспорта и др., при этом разработав универсальный метод решения этих задач, а также различные алгоритмы, реализующие его. Л.В.Канторович впервые точно сформулировал такие важные и теперь широко принятые экономико-математические понятия, как оптимальность плана, оптимальное распределение ресурсов, объективно обусловленные (оптимальные) оценки, указав многочисленные области экономики, где могут быть применены экономико-математические методы принятия оптимальных решений. Позднее, в 40—50-х годах, многое сделали в этой области американские ученые — экономист Т.Купманс и математик Дж. Данциг. Последнему принадлежит термин «линейное программирование». См. также: Ассортиментные задачи, Базисное решение, Блочное программирование, Булево линейное программирование, Ведущий столбец, Ведущая строка, Вершина допустимого многогранника, Вырожденная задача, Гомори способ, Граничная точка, Двойственная задача, Двойственность в линейном программировании, Дифференциальные ренты, Дополняющая нежесткость, Жесткость и нежесткость ограничений ЛП, Задача диеты, Задача о назначениях, Задача о раскрое, Задачи размещения, Исходные уравнения, Куна — Таккера условия, Множители Лагранжа, Область допустимых решений, Опорная прямая, Распределительные задачи, Седловая точка, Симплексная таблица, Симплексный метод, Транспортная задача.
[ http://slovar-lopatnikov.ru/]Тематики
- экономика
- электросвязь, основные понятия
EN
Англо-русский словарь нормативно-технической терминологии > linear programming
-
29 DP
- процессор для обработки данных
- проект предложения
- приоритет при отбрасывании
- предварительное сообщение
- порт пункта назначения
- перепад давлений
- обработка данных
- импульс набора номера
- дистанционная защита
- динамическое программирование
- выявленный загрязнитель воздуха, не имеющий установленных норм по предельно-допустимой концентрации
выявленный загрязнитель воздуха, не имеющий установленных норм по предельно-допустимой концентрации
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
динамическое программирование
—
[Е.С.Алексеев, А.А.Мячев. Англо-русский толковый словарь по системотехнике ЭВМ. Москва 1993]
динамическое программирование
Раздел математического программирования, совокупность приемов, позволяющих находить оптимальные решения, основанные на вычислении последствий каждого решения и выработке оптимальной стратегии для последующих решений. Процессы принятия решений, которые строятся по такому принципу, называются многошаговыми процессами. Математически оптимизационная задача строится в Д. п. с помощью таких соотношений, которые последовательно связаны между собой: например, полученный результат для одного года вводится в уравнение для следующего (или, наоборот, для предыдущего), и т.д. Таким образом, можно получить на вычислительной машине результаты решения задачи для любого избранного момента времени и «следовать» дальше. Д.п. применяется не обязательно для задач, связанных с течением времени. Многошаговым может быть и процесс решения вполне «статической» задачи. Таковы, например, некоторые задачи распределения ресурсов. Общим для задач Д.п. является то, что переменные в модели рассматриваются не вместе, а последовательно, одна за другой. Иными словами, строится такая вычислительная схема, когда вместо одной задачи со многими переменными строится много задач с малым числом (обычно даже одной) переменных в каждой. Это значительно сокращает объем вычислений. Однако такое преимущество достигается лишь при двух условиях: когда критерий оптимальности аддитивен, т.е. общее оптимальное решение является суммой оптимальных решений каждого шага, и когда будущие результаты не зависят от предыстории того состояния системы, при котором принимается решение. Все это вытекает из принципа оптимальности Беллмана (см. Беллмана принцип оптимальности), лежащего в основе теории Д.п. Из него же вытекает основной прием — нахождение правил доминирования, на основе которых на каждом шаге производится сравнение вариантов будущего развития и заблаговременное отсеивание заведомо бесперспективных вариантов. Когда эти правила обращаются в формулы, однозначно определяющие элементы последовательности один за другим, их называют разрешающими правилами. Процесс решения при этом складывается из двух этапов. На первом он ведется «с конца»: для каждого из различных предположений о том, чем кончился предпоследний шаг, находится условное оптимальное управление на последнем шаге, т.е. управление, которое надо применить, если предпоследний шаг закончился определенным образом. Такая процедура проводится до самого начала, а затем — второй раз — выполняется от начала к концу, в результате чего находятся уже не условные, а действительно оптимальные шаговые управления на всех шагах операции (см. пример в статье Дерево решений). Несмотря на выигрыш в сокращении вычислений при использовании подобных методов по сравнению с простым перебором возможных вариантов, их объем остается очень большим. Поэтому размерность практических задач Д.п. всегда незначительна, что ограничивает его применение. Можно выделить два наиболее общих класса задач, к которым в принципе мог бы быть применим этот метод, если бы не «проклятие размерности». (На самом деле на таких задачах, взятых в крайне упрощенном виде, пока удается лишь демонстрировать общие основы метода и анализировать экономико-математические модели). Первый — задачи планирования деятельности экономического объекта (предприятия, отрасли и т.п.) с учетом изменения потребности в производимой продукции во времени. Второй класс задач — оптимальное распределение ресурсов между различными направлениями во времени. Сюда можно отнести, в частности, такую интересную задачу: как распределить урожай зерна каждого года на питание и на семена, чтобы в сумме за ряд лет получить наибольшее количество хлеба?
[ http://slovar-lopatnikov.ru/]Тематики
EN
дистанционная защита
-
[В.А.Семенов Англо-русский словарь по релейной защите]
дистанционная защита
Защита с относительной селективностью, срабатывание и селективность которой зависят от измерения в месте ее установки электрических величин, по которым путем сравнения с уставками зон оценивается эквивалентная удаленность повреждения
[Разработка типовых структурных схем микропроцессорных устройств РЗА на объектах ОАО "ФКС ЕЭС". Пояснительная записка. Новосибирск 2006 г.]
дистанционная защита
Защита, чье действие и селективность основаны на локальном измерении электрических величин, по которым рассчитываются эквивалентные расстояния до места повреждения в пределах установленных зон.
[ http://docs.cntd.ru/document/1200069370]
дистанционная защита
Защита, принцип действия и селективность которой основаны на измерении в месте установки защиты электрических величин, характеризующих повреждение, и сравнении их с уставками зон.
[Циглер Г. Цифровая дистанционная защита: принципы и применение. М.: Энергоиздат. 2005]EN
distance protection
distance relay (US)
a non-unit protection whose operation and selectivity depend on local measurement of electrical quantities from which the equivalent distance to the fault is evaluated by comparing with zone settings
[IEV ref 448-14-01]FR
protection de distance
protection à sélectivité relative de section dont le fonctionnement et la sélectivité dépendent de la mesure locale de grandeurs électriques à partir desquelles la distance équivalente du défaut est évaluée par comparaison avec des réglages de zones
[IEV ref 448-14-01]Дистанционные защиты применяются в сетях сложной конфигурации, где по соображениям быстродействия и чувствительности не могут использоваться более простые максимальные токовые и токовые направленные защиты.
Дистанционной защитой определяется сопротивление (или расстояние - дистанция) до места КЗ, и в зависимости от этого защита срабатывает с меньшей или большей выдержкой времени. Следует уточнить, что современные дистанционные защиты, обладающие ступенчатыми характеристиками времени, не измеряют каждый раз при КЗ значение указанного выше сопротивления на зажимах измерительного органа и не устанавливают в зависимости от этого большую или меньшую выдержку времени, а всего лишь контролируют зону, в которой произошло повреждение. Время срабатывания защиты при КЗ в любой точке рассматриваемой зоны остается неизменным. Каждая защита выполняется многоступенчатой, причем при КЗ в первой зоне, охватывающей 80-85% длины защищаемой линии, время срабатывания защиты не более 0,15 с. Для второй зоны, выходящей за пределы защищаемой линии, выдержка времени на ступень выше и колеблется в пределах 0,4-0,6 с. При КЗ в третьей зоне выдержка времени еще более увеличивается и выбирается так же, как и для направленных токовых защит.
На рис. 7.15 показан участок сети с двухсторонним питанием и приведены согласованные характеристики выдержек времени дистанционных защит (ДЗ). При КЗ, например, в точке К1 - первой зоне действия защит ДЗ3 и ДЗ4 - они сработают с минимальным временем соответственно t I3 и t I4. Защиты ДЗ1 и ДЗ6 также придут в действие, но для них повреждение будет находиться в III зоне, и они могут сработать как резервные с временем t III1 и t III6 только в случае отказа в отключении линии БВ собственными защитами.
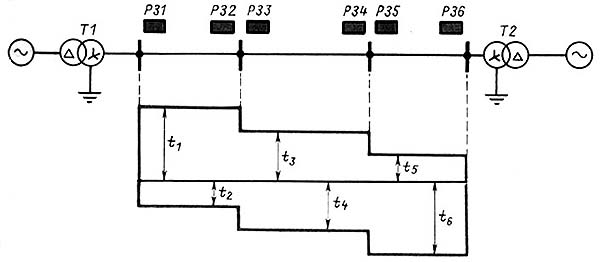
Рис. 7.14. Размещение токовых направленных защит нулевой последовательности на участке сетей и характеристики выдержек времени защит:
Р31-Р36 - комплекты токовых направленных защит нулевой последовательности
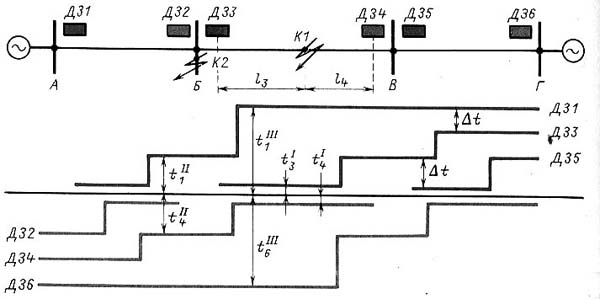
Рис. 7.15. Защита участка сети дистанционными защитами и характеристики выдержек времени этих защит:
ДЗ1-ДЗ6 - комплекты дистанционных защит; l3 и l4 - расстояния от мест установки защит до места повреждения
При КЗ в точке К2 (шины Б) оно устраняется действием защит ДЗ1 и ДЗ4 с временем t II1 и t II4.
Дистанционная защита - сложная защита, состоящая из ряда элементов (органов), каждый из которых выполняет определенную функцию. На рис. 7.16 представлена упрощенная схема дистанционной защиты со ступенчатой характеристикой выдержки времени. Схема имеет пусковой и дистанционный органы, а также органы направления и выдержки времени.
Пусковой орган ПО выполняет функцию отстройки защиты от нормального режима работы и пускает ее в момент возникновения КЗ. В качестве такого органа в рассматриваемой схеме применено реле сопротивления, реагирующее на ток I р и напряжение U p на зажимах реле.
Дистанционные (или измерительные) органы ДО1 и ДО2 устанавливают меру удаленности места КЗ.
Каждый из них выполнен при помощи реле сопротивления, которое срабатывает при КЗ, если
где Z p - сопротивление на зажимах реле; Z - сопротивление защищаемой линии длиной 1 км; l - длина участка линии до места КЗ, км; Z cp - сопротивление срабатывания реле.
Из приведенного соотношения видно, что сопротивление на зажимах реле Z p пропорционально расстоянию l до места КЗ.
Органы выдержки времени ОВ2 и ОВ3 создают выдержку времени, с которой защита действует на отключение линии при КЗ во второй и третьей зонах. Орган направления OHM разрешает работу защиты при направлении мощности КЗ от шин в линию.
В схеме предусмотрена блокировка БН, выводящая защиту из действия при повреждениях цепей напряжения, питающих защиту. Дело в том, что если при повреждении цепей напряжение на зажимах защиты Uр=0, то Zp=0. Это означает, что и пусковой, и дистанционный органы могут сработать неправильно. Для предотвращения отключения линии при появлении неисправности в цепях напряжения блокировка снимает с защиты постоянный ток и подает сигнал о неисправности цепей напряжения. Оперативный персонал в этом случае обязан быстро восстановить нормальное напряжение на защите. Если по какой-либо причине это не удается выполнить, защиту следует вывести из действия переводом накладки в положение "Отключено".
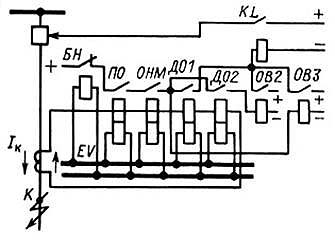
Рис. 7.16. Принципиальная схема дистанционной защиты со ступенчатой характеристикой выдержки времени
Работа защиты.
При КЗ на линии срабатывают реле пускового органа ПО и реле органа направления OHM. Через контакты этих реле плюс постоянного тока поступит на контакты дистанционных органов и на обмотку реле времени третьей зоны ОВ3 и приведет его в действие. Если КЗ находится в первой зоне, дистанционный орган ДО1 замкнет свои контакты и пошлет импульс на отключение выключателя без выдержки времени. При КЗ во второй зоне ДО1 работать не будет, так как значение сопротивления на зажимах его реле будет больше значения сопротивления срабатывания. В этом случае сработает дистанционный орган второй зоны ДО2, который запустит реле времени ОВ2. По истечении выдержки времени второй зоны от реле ОВ2 поступит импульс на отключение линии. Если КЗ произойдет в третьей зоне, дистанционные органы ДО1 и ДО2 работать не будут, так как значения сопротивления на их зажимах больше значений сопротивлений срабатывания. Реле времени ОВ3, запущенное в момент возникновения КЗ контактами реле OHM, доработает и по истечении выдержки времени третьей зоны пошлет импульс на отключение выключателя линии. Дистанционный орган для третьей зоны защиты, как правило, не устанавливается.
В комплекты дистанционных защит входят также устройства, предотвращающие срабатывание защит при качаниях в системе.
[ http://leg.co.ua/knigi/raznoe/obsluzhivanie-ustroystv-releynoy-zaschity-i-avtomatiki-4.html]
Тематики
Синонимы
EN
DE
- Distanzschutz, m
FR
импульс набора номера
—
[Л.Г.Суменко. Англо-русский словарь по информационным технологиям. М.: ГП ЦНИИС, 2003.]Тематики
EN
обработка данных
Систематическое осуществление операций над данными.
[ИСО/МЭК 2382-1]
[ ГОСТ Р 52292-2004]
обработка данных
Технологическая операция, в результате которой изменяет свое значение хотя бы один из показателей, характеризующих состояние данных (объем данных при этом не изменяется).
[ ГОСТ Р 51170-98]
обработка данных
- Любое преобразование данных при решении конкретной задачи.
- Работа, выполняемая компьютером.
[ http://www.morepc.ru/dict/]
обработка данных
Процесс приведения данных к виду, удобному для использования. Независимо от вида информации, которая должна быть получена, и типа оборудования любая система О.д. выполняет три основные группы операций: подбор исходных, входных данных (см. Сбор данных), собственно их обработку (в процессе которой система оперирует промежуточными данными), получение и анализ результатов, т.е. выходных данных). Выполняет ли эти операции человек или машина (см. Автоматизированная система обработки данных), все равно они следуют при этом заданному алгоритму (для человека это могут быть инструкция, методика, а для ЭВМ — программа). Важным процессом О.д. является агрегирование, укрупнение их от одной к другой ступени хозяйственной иерархии. Проверка статистических данных, приведение их к сопоставимому виду, сложение, вычитание и другие арифметические операции — тоже процессы О.д. Можно назвать также выборку, отсечение ненужных данных, запоминание, изменение последовательности (упорядочение), классификацию и многие другие. О.д. предшествует во времени принятию решений. Она может производиться эпизодически, периодически (т.е. через заданные промежутки времени), в АСУ — также в реальном масштабе времени. Последнее означает, что О.д. производится с той же скоростью, с какой протекают описываемые ими события, иначе говоря — со скоростью, достаточной для анализа событий и управления их последующим ходом.
[ http://slovar-lopatnikov.ru/]
Тематики
- информационные технологии в целом
- качество служебной информации
- экономика
- электронный обмен информацией
EN
порт пункта назначения
(МСЭ-T G.7041/ Y.1303).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
предварительное сообщение
—
[Е.С.Алексеев, А.А.Мячев. Англо-русский толковый словарь по системотехнике ЭВМ. Москва 1993]Тематики
EN
приоритет при отбрасывании
(МСЭ-T G.8010/ Y.1306).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
процессор для обработки данных
—
[Е.С.Алексеев, А.А.Мячев. Англо-русский толковый словарь по системотехнике ЭВМ. Москва 1993]Тематики
EN
Англо-русский словарь нормативно-технической терминологии > DP
-
30 dynamic programming
динамическое программирование
—
[Е.С.Алексеев, А.А.Мячев. Англо-русский толковый словарь по системотехнике ЭВМ. Москва 1993]
динамическое программирование
Раздел математического программирования, совокупность приемов, позволяющих находить оптимальные решения, основанные на вычислении последствий каждого решения и выработке оптимальной стратегии для последующих решений. Процессы принятия решений, которые строятся по такому принципу, называются многошаговыми процессами. Математически оптимизационная задача строится в Д. п. с помощью таких соотношений, которые последовательно связаны между собой: например, полученный результат для одного года вводится в уравнение для следующего (или, наоборот, для предыдущего), и т.д. Таким образом, можно получить на вычислительной машине результаты решения задачи для любого избранного момента времени и «следовать» дальше. Д.п. применяется не обязательно для задач, связанных с течением времени. Многошаговым может быть и процесс решения вполне «статической» задачи. Таковы, например, некоторые задачи распределения ресурсов. Общим для задач Д.п. является то, что переменные в модели рассматриваются не вместе, а последовательно, одна за другой. Иными словами, строится такая вычислительная схема, когда вместо одной задачи со многими переменными строится много задач с малым числом (обычно даже одной) переменных в каждой. Это значительно сокращает объем вычислений. Однако такое преимущество достигается лишь при двух условиях: когда критерий оптимальности аддитивен, т.е. общее оптимальное решение является суммой оптимальных решений каждого шага, и когда будущие результаты не зависят от предыстории того состояния системы, при котором принимается решение. Все это вытекает из принципа оптимальности Беллмана (см. Беллмана принцип оптимальности), лежащего в основе теории Д.п. Из него же вытекает основной прием — нахождение правил доминирования, на основе которых на каждом шаге производится сравнение вариантов будущего развития и заблаговременное отсеивание заведомо бесперспективных вариантов. Когда эти правила обращаются в формулы, однозначно определяющие элементы последовательности один за другим, их называют разрешающими правилами. Процесс решения при этом складывается из двух этапов. На первом он ведется «с конца»: для каждого из различных предположений о том, чем кончился предпоследний шаг, находится условное оптимальное управление на последнем шаге, т.е. управление, которое надо применить, если предпоследний шаг закончился определенным образом. Такая процедура проводится до самого начала, а затем — второй раз — выполняется от начала к концу, в результате чего находятся уже не условные, а действительно оптимальные шаговые управления на всех шагах операции (см. пример в статье Дерево решений). Несмотря на выигрыш в сокращении вычислений при использовании подобных методов по сравнению с простым перебором возможных вариантов, их объем остается очень большим. Поэтому размерность практических задач Д.п. всегда незначительна, что ограничивает его применение. Можно выделить два наиболее общих класса задач, к которым в принципе мог бы быть применим этот метод, если бы не «проклятие размерности». (На самом деле на таких задачах, взятых в крайне упрощенном виде, пока удается лишь демонстрировать общие основы метода и анализировать экономико-математические модели). Первый — задачи планирования деятельности экономического объекта (предприятия, отрасли и т.п.) с учетом изменения потребности в производимой продукции во времени. Второй класс задач — оптимальное распределение ресурсов между различными направлениями во времени. Сюда можно отнести, в частности, такую интересную задачу: как распределить урожай зерна каждого года на питание и на семена, чтобы в сумме за ряд лет получить наибольшее количество хлеба?
[ http://slovar-lopatnikov.ru/]Тематики
EN
Англо-русский словарь нормативно-технической терминологии > dynamic programming
-
31 nonlinear programming
нелинейное программирование
Раздел математического программирования, изучающий методы решения экстремальных задач с нелинейной целевой функцией и (или) областью допустимых решений, определенной нелинейными ограничениями. В экономике это соответствует тому, что результаты (эффективность) возрастают или убывают непропорционально изменению масштабов использования ресурсов (или, что то же самое, масштабов производства) - например, из-за деления издержек производства на предприятиях на переменные и условно-постоянные, из-за насыщения спроса на товары, когда каждую следующую единицу продать труднее, чем предыдущую, из-за влияния экстерналий (см.Внешняя экономия, внешние издержки) и т.д. В краткой форме задачу Н.п. можно записать так: F (x) ? max при условиях g (x) ? b, x ? 0. где x — вектор искомых переменных, F (x) — целевая функция, g (x) — функция ограничений (непрерывно дифференцируемая), b — вектор констант ограничений (выбор знака ? в первом условии здесь произволен, его всегда можно изменить на обратный). Решение задачи нелинейного программирования (глобальный максимум или минимум) может принадлежать либо границе, либо внутренней части допустимого множества. Иначе говоря, задача состоит в выборе таких неотрицательных значений переменных, подчиненных системе ограничений в форме неравенств, при которых достигается максимум (или минимум) данной функции. При этом не оговаривается форма ни целевой функции, ни неравенств. Могут быть разные случаи: целевая функция — нелинейна, а ограничения — линейны; целевая функция — линейна, а ограничения (хотя бы одно из них) - нелинейны; и целевая функция, и ограничения нелинейны. Задачи, в которых число переменных и (или) число ограничений бесконечно, называются задачами бесконечномерного Н.п.. Задачи, в которых целевая функция и (или) функции ограничений содержат случайные элементы, называются задачами стохастического Н.п. Например, задачу для двух переменных (выпуск продукта x и выпуск продукта y) и вогнутой целевой функции (прибыль — p) можно геометрически представить на чертеже (см. рис. H.4; заштрихована область допустимых решений). Эта задача реалистично отражает распространенное в экономике явление: рост прибыли с ростом производства до определенного (оптимального) уровня в точке B’, а затем ее снижение, например, вследствие затоваривания продукцией или исчерпания наиболее эффективных ресурсов. Нелинейные задачи сложны, часто их упрощают тем, что приводят к линейным. Для этого условно принимают, что на том или ином участке целевая функция возрастает или убывает пропорционально изменению независимых переменных. Такой подход называется методом кусочно-линейных приближений, он применим, однако, лишь к некоторым видам нелинейных задач. Нелинейные задачи в определенных условиях решаются с помощью функции Лагранжа (см. Множители Лагранжа, Лагранжиан): найдя ее седловую точку, тем самым находят и решение задачи. Среди вычислительных алгоритмов Н.п. большое место занимают градиентные методы. Универсального же метода для нелинейных задач нет, и, по-видимому, может не быть, поскольку они чрезвычайно разнообразны. Особенно трудно решаются многоэкстремальные задачи. Для некоторых типов задач выпуклого программирования (вид нелинейного) разработаны эффективные численные методы оптимизации Рис. Н.4 Нелинейное программирование (заштрихована область допустимых решений)
[ http://slovar-lopatnikov.ru/]Тематики
EN
Англо-русский словарь нормативно-технической терминологии > nonlinear programming
-
32 smart metering
интеллектуальный учет электроэнергии
-
[Интент]Учет электроэнергии
Понятия «интеллектуальные измерения» (Smart Metering), «интеллектуальный учет», «интеллектуальный счетчик», «интеллектуальная сеть» (Smart Grid), как все нетехнические, нефизические понятия, не имеют строгой дефиниции и допускают произвольные толкования. Столь же нечетко определены и задачи Smart Metering в современных электрических сетях.
Нужно ли использовать эти термины в такой довольно консервативной области, как электроэнергетика? Что отличает новые системы учета электроэнергии и какие функции они должны выполнять? Об этом рассуждает Лев Константинович Осика.
SMART METERING – «ИНТЕЛЛЕКТУАЛЬНЫЙ УЧЕТ» ЭЛЕКТРОЭНЕРГИИ
Определения и задачи
По многочисленным публикациям в СМИ, выступлениям на конференциях и совещаниях, сложившемуся обычаю делового оборота можно сделать следующие заключения:
• «интеллектуальные измерения» производятся у потребителей – физических лиц, проживающих в многоквартирных домах или частных домовладениях;
• основная цель «интеллектуальных измерений» и реализующих их «интеллектуальных приборов учета» в России – повышение платежной дисциплины, борьба с неплатежами, воровством электроэнергии;
• эти цели достигаются путем так называемого «управления электропотреблением», под которым подразумеваются ограничения и отключения неплательщиков;
• средства «управления электропотреблением» – коммутационные аппараты, получающие команды на включение/отключение, как правило, размещаются в одном корпусе со счетчиком и представляют собой его неотъемлемую часть.
Главным преимуществом «интеллектуального счетчика» в глазах сбытовых компаний является простота осуществления отключения (ограничения) потребителя за неплатежи (или невнесенную предоплату за потребляемую электроэнергию) без применения физического воздействия на существующие вводные выключатели в квартиры (коттеджи).
В качестве дополнительных возможностей, стимулирующих установку «интеллектуальных приборов учета», называются:
• различного рода интеграция с измерительными приборами других энергоресурсов, с биллинговыми и информационными системами сбытовых и сетевых компаний, муниципальных администраций и т.п.;
• расширенные возможности отображения на дисплее счетчика всей возможной (при первичных измерениях токов и напряжений) информации: от суточного графика активной мощности, напряжения, частоты до показателей надежности (времени перерывов в питании) и денежных показателей – стоимости потребления, оставшейся «кредитной линии» и пр.;
• двухсторонняя информационная (и управляющая) связь сбытовой компании и потребителя, т.е. передача потребителю различных сообщений, дистанционная смена тарифа, отключение или ограничение потребления и т.п.
ЧТО ТАКОЕ «ИНТЕЛЛЕКТУАЛЬНЫЕ ИЗМЕРЕНИЯ»?
Приведем определение, данное в тематическом докладе комитета ЭРРА «Нормативные аспекты СМАРТ ИЗМЕРЕНИЙ», подготовленном известной международной компанией КЕМА:
«…Для ясности необходимо дать правильное определение смарт измерениям и описать организацию инфраструктуры смарт измерений. Необходимо отметить, что между смарт счетчиком и смарт измерением существует большая разница. Смарт счетчик – это отдельный прибор, который установлен в доме потребителя и в основном измеряет потребление энергии потребителем. Смарт измерения – это фактическое применение смарт счетчиков в большем масштабе, то есть применение общего принципа вместо отдельного прибора. Однако, если рассматривать пилотные проекты смарт измерений или национальные программы смарт измерений, то иногда можно найти разницу в определении смарт измерений. Кроме того, также часто появляются такие термины, как автоматическое считывание счетчика (AMR) и передовая инфраструктура измерений (AMI), особенно в США, в то время как в ЕС часто используется достаточно туманный термин «интеллектуальные системы измерений …».
Представляют интерес и высказывания В.В. Новикова, начальника лаборатории ФГУП ВНИИМС [1]: «…Это автоматизированные системы, которые обеспечивают и по-требителям, и сбытовым компаниям контроль и управление потреблением энергоресурсов согласно установленным критериям оптимизации энергосбережения. Такие измерения называют «интеллектуальными измерениями», или Smart Metering, как принято за рубежом …
…Основные признаки Smart Metering у счетчиков электрической энергии. Их шесть:
1. Новшества касаются в меньшей степени принципа измерений электрической энергии, а в большей – функциональных возможностей приборов.
2. Дополнительными функциями выступают, как правило, измерение мощности за короткие периоды, коэффициента мощности, измерение времени, даты и длительности провалов и отсутствия питающего напряжения.
3. Счетчики имеют самодиагностику и защиту от распространенных методов хищения электроэнергии, фиксируют в журнале событий моменты вскрытия кожуха, крышки клеммной колодки, воздействий сильного магнитного поля и других воздействий как на счетчик, его информационные входы и выходы, так и на саму электрическую сеть.
4. Наличие функций для управления нагрузкой и подачи команд на включение и отключение электрических приборов.
5. Более удобные и прозрачные функции для потребителей и энергоснабжающих организаций, позволяющие выбирать вид тарифа и энергосбытовую компанию в зависимости от потребностей в энергии и возможности ее своевременно оплачивать.
6. Интеграция измерений и учета всех энергоресурсов в доме для выработки решений, минимизирующих расходы на оплату энергоресурсов. В эту стратегию вовлекаются как отдельные потребители, так и управляющие компании домами, энергоснабжающие и сетевые компании …».
Из этих цитат нетрудно заметить, что первые 3 из 6 функций полностью повторяют требования к счетчикам АИИС КУЭ на оптовом рынке электроэнергии и мощности (ОРЭМ), которые не менялись с 2003 г. Функция № 5 является очевидной функцией счетчика при работе потребителя на розничных рынках электроэнергии (РРЭ) в условиях либеральной (рыночной) энергетики. Функция № 6 практически повторяет многочисленные определения понятия «умный дом», а функция № 4, провозглашенная в нашей стране, полностью соответствует желаниям сбытовых компаний найти наконец действенное средство воздействия на неплательщиков. При этом ясно, что неплатежи – не следствие отсутствия «умных счетчиков», а результат популистской политики правительства. Отключить физических (да и юридических) лиц невозможно, и эта функция счетчика, безусловно, останется невостребованной до внесения соответствующих изменений в нормативно-правовые акты.
На функции № 4 следует остановиться особо. Она превращает измерительный прибор в управляющую систему, в АСУ, так как содержит все признаки такой системы: наличие измерительного компонента, решающего компонента (выдающего управляющие сигналы) и, в случае размещения коммутационных аппаратов внутри счетчика, органов управления. Причем явно или неявно, как и в любой системе управления, подразумевается обратная связь: заплатил – включат опять.
Обоснованное мнение по поводу Smart Grid и Smart Metering высказал В.И. Гуревич в [2]. Приведем здесь цитаты из этой статьи с локальными ссылками на используемую литературу: «…Обратимся к истории. Впервые этот термин встретился в тексте статьи одного из западных специалистов в 1998 г. [1]. В названии статьи этот термин был впервые использован Массудом Амином и Брюсом Волленбергом в их публикации «К интеллектуальной сети» [2]. Первые применения этого термина на Западе были связаны с чисто рекламными названиями специальных контроллеров, предназначенных для управления режимом работы и синхронизации автономных ветрогенераторов (отличающихся нестабильным напряжением и частотой) с электрической сетью. Потом этот термин стал применяться, опять-таки как чисто рекламный ход, для обозначения микропроцессорных счетчиков электроэнергии, способных самостоятельно накапливать, обрабатывать, оценивать информацию и передавать ее по специальным каналам связи и даже через Интернет. Причем сами по себе контроллеры синхронизации ветрогенераторов и микропроцессорные счетчики электроэнергии были разработаны и выпускались различными фирмами еще до появления термина Smart Grid. Это название возникло намного позже как чисто рекламный трюк для привлечения покупателей и вначале использовалось лишь в этих областях техники. В последние годы его использование расширилось на системы сбора и обработки информации, мониторинга оборудования в электроэнергетике [3] …
1. Janssen M. C. The Smart Grid Drivers. – PAC, June 2010, p. 77.
2. Amin S. M., Wollenberg B. F. Toward a Smart Grid. – IEEE P&E Magazine, September/October, 2005.
3. Gellings C. W. The Smart Grid. Enabling Energy Efficiency and Demand Response. – CRC Press, 2010. …».
Таким образом, принимая во внимание столь различные мнения о предмете Smart Grid и Smart Metering, сетевая компания должна прежде всего определить понятие «интеллектуальная система измерения» для объекта измерений – электрической сети (как актива и технологической основы ОРЭМ и РРЭ) и представить ее предметную область именно для своего бизнеса.
БИЗНЕС И «ИНТЕЛЛЕКТУАЛЬНЫЙ УЧЕТ»
В результате изучения бизнес-процессов деятельности ряда сетевых компаний и взаимодействия на РРЭ сетевых, энергосбытовых компаний и исполнителей коммунальных услуг были сформулированы следующие исходные условия.
1. В качестве главного признака новой интеллектуальной системы учета электроэнергии (ИСУЭ), отличающей ее от существующей системы коммерческого и технического учета электроэнергии, взято расширение функций, причем в систему вовлекаются принципиально новые функции: определение технических потерь, сведение балансов в режиме, близком к on-line, определение показателей надежности. Это позволит, среди прочего, получить необходимую информацию для решения режимных задач Smart Grid – оптимизации по реактивной мощности, управления качеством электроснабжения.
2. Во многих случаях (помимо решения задач, традиционных для сетевой компании) рассматриваются устройства и системы управления потреблением у физических лиц, осуществляющие их ограничения и отключения за неплатежи (традиционные задачи так называемых систем AMI – Advanced Metering Infrastructure).
Учитывая вышеизложенное, для электросетевой компании предлагается принимать следующее двойственное (по признаку предметной области) определение ИСУЭ:
в отношении потребителей – физических лиц: «Интеллектуальная система измерений – это совокупность устройств управления нагрузкой, приборов учета, коммуникационного оборудования, каналов передачи данных, программного обеспечения, серверного оборудования, алгоритмов, квалифицированного персонала, которые обеспечивают достаточный объем информации и инструментов для управления потреблением электроэнергии согласно договорным обязательствам сторон с учетом установленных критериев энергоэффективности и надежности»;
в отношении системы в целом: «Интеллектуальная система измерений – это автоматизированная комплексная система измерений электроэнергии (с возможностью измерений других энергоресурсов), определения учетных показателей и решения на их основе технологических и бизнес-задач, которая позволяет интегрировать различные информационные системы субъектов рынка и развиваться без ограничений в обозримом будущем».
ЗАДАЧИ «ИНТЕЛЛЕКТУАЛЬНОГО УЧЕТА»
Далее мы будем основываться на том, что ИСУЭ позволит осуществить следующие функции в бытовом секторе:
• дистанционное получение от каждой точки измерения (узла учета) у бытового потребителя сведений об отпущенной или потребленной электроэнергии;
• расчет внутриобъектового (многоквартирный жилой дом, поселок) баланса поступления и потребления энергоресурсов с целью выявления технических и коммерческих потерь и принятия мер по эффективному энергосбережению;
• контроль параметров поставляемых энергоресурсов с целью обнаружения и регистрации их отклонений от договорных значений;
• обнаружение фактов несанкционированного вмешательства в работу приборов учета или изменения схем подключения электроснабжения;
• применение санкций против злостных неплательщиков методом ограничения потребляемой мощности или полного отключения энергоснабжения;
• анализ технического состояния и отказов приборов учета;
• подготовка отчетных документов об электропотреблении;
• интеграция с биллинговыми системами.
«ИНТЕЛЛЕКТУАЛЬНЫЙ КОММЕРЧЕСКИЙ УЧЕТ»
Остановимся подробно на одном из атрибутов ИСУЭ, который считаю ключевым для основного электросетевого бизнеса.
Особенностью коммерческого учета электроэнергии (КУЭ) распределительных сетевых компаний является наличие двух сфер коммерческого оборота электроэнергии – ОРЭМ и РРЭ, которые хотя и сближаются в нормативном и организационном плане, но остаются пока существенно различными с точки зрения требований к КУЭ.
Большинство сетевых компаний является субъектом как ОРЭМ, так и РРЭ. Соответственно и сам коммерческий учет в отношении требований к нему разделен на два вида:
• коммерческий учет на ОРЭМ (технические средства – АИИС КУЭ);
• коммерческий учет на РРЭ (технические средства – АСКУЭ).
Кроме того, к коммерческому учету, т.е. к определению тех показателей, которые служат для начисления обязательств и требований сетевой компании (оплата услуг по транспорту электроэнергии, купля-продажа технологических потерь), следует отнести и измерения величин, необходимых для определения показателей надежности сети в отношении оказания услуг по передаче электроэнергии.
Отметим, что сложившиеся технологии АИИС КУЭ и АСКУЭ по своей функциональной полноте (за исключением функции коммутации нагрузки внутри систем) – это технологии Smart Metering в том понимании, которое мы обсуждали выше. Поэтому далее будем считать эти понятия полностью совпадающими.
Подсистема ИСУЭ на РРЭ, безусловно, самая сложная и трудоемкая часть всей интеллектуальной системы как с точки зрения организации сбора информации (включая измерительные системы (ИС) и средства связи в автоматизированных системах), так и с точки зрения объема точек поставки и соответственно средств измерений. Последние отличаются большим многообразием и сложностью контроля их и метрологических характеристик (МХ).
Если технические требования к ИС на ОРЭМ и к ИС крупных потребителей (по крайней мере потребителей с присоединенной мощностью свыше 750 кВА) принципиально близки, то в отношении нормативного и организационного компонентов имеются сильные различия. Гармоничная их интеграция в среде разных компонентов – основная задача создания современной системы ИСУЭ любой сетевой компании.
Особенностью коммерческого учета для нужд сетевого комплекса – основного бизнеса компании в отличие от учета электроэнергии потребителей, генерирующих источников и сбытовых компаний – является сам характер учетных показателей, вернее, одного из них – технологических потерь электроэнергии. Здесь трудность состоит в том, что границы балансовой принадлежности компании должны оснащаться средствами учета в интересах субъектов рынка – участников обращения электроэнергии, и по правилам, установленным для них, будь то ОРЭМ или РРЭ. А к измерению и учету важнейшего собственного учетного показателя, потерь, отдельные нормативные требования не предъявляются, хотя указанные показатели должны определяться по своим технологиям.
При этом сегодня для эффективного ведения бизнеса перед сетевыми компаниями, по мнению автора, стоит задача корректного определения часовых балансов в режиме, близком к on-line, в условиях, когда часть счетчиков (со стороны ОРЭМ) имеют автоматические часовые измерения электроэнергии, а подавляющее большинство (по количеству) счетчиков на РРЭ (за счет физических лиц и мелкомоторных потребителей) не позволяют получать такие измерения. Актуальность корректного определения фактических потерь следует из необходимости покупки их объема, не учтенного при установлении тарифов на услуги по передаче электроэнергии, а также предоставления информации для решения задач Smart Grid.
В то же время специалистами-практиками часто ставится под сомнение практическая востребованность определения технологических потерь и их составляющих в режиме on-line. Учитывая это мнение, которое не согласуется с разрабатываемыми стратегиями Smart Grid, целесообразно оставить окончательное решение при разработке ИСУЭ за самой компанией.
Cистемы АИИС КУЭ сетевых компаний никогда не создавались целенаправленно для решения самых насущных для них задач, таких как:
1. Коммерческая задача купли-продажи потерь – качественного (прозрачного и корректного в смысле метрологии и требований действующих нормативных документов) инструментального или расчетно-инструментального определения технологических потерь электроэнергии вместе с их составляющими – техническими потерями и потреблением на собственные и хозяйственные нужды сети.
2. Коммерческая задача по определению показателей надежности электроснабжения потребителей.
3. Управленческая задача – получение всех установленных учетной политикой компании балансов электроэнергии и мощности по уровням напряжения, по филиалам, по от-дельным подстанциям и группам сетевых элементов, а также КПЭ, связанных с оборотом электроэнергии и оказанием услуг в натуральном выражении.
Не ставилась и задача технологического обеспечения возможного в перспективе бизнеса сетевых компаний – предоставления услуг оператора коммерческого учета (ОКУ) субъектам ОРЭМ и РРЭ на территории обслуживания компании.
Кроме того, необходимо упорядочить систему учета для определения коммерческих показателей в отношении определения обязательств и требований оплаты услуг по транспорту электроэнергии и гармонизировать собственные интересы и интересы смежных субъектов ОРЭМ и РРЭ в рамках существующей системы взаимодействий и возможной системы взаимодействий с введением института ОКУ.
Именно исходя из этих целей (не забывая при этом про коммерческие учетные показатели смежных субъектов рынка в той мере, какая требуется по обязательствам компании), и нужно строить подлинно интеллектуальную измерительную систему. Иными словами, интеллект измерений – это главным образом интеллект решения технологических задач, необходимых компании.
По сути, при решении нового круга задач в целевой модели интеллектуального учета будет реализован принцип придания сетевой компании статуса (функций) ОКУ в зоне обслуживания. Этот статус формально прописан в действующей редакции Правил розничных рынков (Постановление Правительства РФ № 530 от 31.08.2006), однако на практике не осуществляется в полном объеме как из-за отсутствия необходимой технологической базы, так и из-за организационных трудностей.
Таким образом, сетевая компания должна сводить баланс по своей территории на новой качественной ступени – оперативно, прозрачно и полно. А это означает сбор информации от всех присоединенных к сети субъектов рынка, формирование учетных показателей и передачу их тем же субъектам для определения взаимных обязательств и требований.
Такой подход предполагает не только новую схему расстановки приборов в соответствии с комплексным решением всех поставленных технологами задач, но и новые функциональные и метрологические требования к измерительным приборам.
ПРЕИМУЩЕСТВА ИСУЭ
Внедрение ИСУЭ даст новые широкие возможности для всех участников ОРЭМ и РРЭ в зоне обслуживания электросетевой компании.
Для самой компании:
1. Повышение эффективности существующего бизнеса.
2. Возможности новых видов бизнеса – ОКУ, регистратор единой группы точек поставки (ГТП), оператор заправки электрического транспорта и т.п.
3. Обеспечение внедрения технологий Smart grid.
4. Создание и развитие программно-аппаратного комплекса (с сервисно-ориентированной архитектурой) и ИС, снимающих ограничения на развитие технологий и бизнеса в долгосрочной перспективе.
Для энергосбытовой деятельности:
1. Автоматический мониторинг потребления.
2. Легкое определение превышения фактических показателей над планируемыми.
3. Определение неэффективных производств и процессов.
4. Биллинг.
5. Мониторинг коэффициента мощности.
6. Мониторинг показателей качества (напряжение и частота).
Для обеспечения бизнеса – услуги для генерирующих, сетевых, сбытовых компаний и потребителей:
1. Готовый вариант на все случаи жизни.
2. Надежность.
3. Гарантия качества услуг.
4. Оптимальная и прозрачная стоимость услуг сетевой компании.
5. Постоянное внедрение инноваций.
6. Повышение «интеллекта» при работе на ОРЭМ и РРЭ.
7. Облегчение технологического присоединения энергопринимающих устройств субъектов ОРЭМ и РРЭ.
8. Качественный консалтинг по всем вопросам электроснабжения и энергосбережения.
Успешная реализации перечисленных задач возможна только на базе информационно-технологической системы (программно-аппаратного комплекса) наивысшего достигнутого на сегодняшний день уровня интеграции со всеми возможными информационными системами субъектов рынка – измерительно-учетными как в отношении электроэнергии, так и (в перспективе) в отношении других энергоресурсов.
ЛИТЕРАТУРА
1. Новиков В.В. Интеллектуальные измерения на службе энергосбережения // Энергоэксперт. 2011. № 3.
2. Гуревич В.И. Интеллектуальные сети: новые перспективы или новые проблемы? // Электротехнический рынок. 2010. № 6.
[ http://www.news.elteh.ru/arh/2011/71/14.php]Тематики
EN
Англо-русский словарь нормативно-технической терминологии > smart metering
-
33 economico-mathematical analysis of optimal solutions
экономико-математический анализ решения оптимизационных задач
Состоит прежде всего в выявлении условий, при которых полученное решение задачи устойчиво, т.е. найденный план остается оптимальным при сравнительно небольших изменениях начальных условий. Для этого просчитывается и сравнивается ряд более или менее похожих вариантов задачи. Важное направление Э.-м.а. состоит в изучении дополнительных факторов и условий, которые учитывались при постановке задачи. Главную роль в этом играют оптимальные оценки, выражающие эффективность использования ресурсов, сравнительную эффективность объектов оптимизируемой системы — как вошедших в решение задачи, так и не вошедших. В некоторых случаях для Э.-м.а. используются показатели так называемых условно-оптимальных планов, т.е. промежуточных планов, получаемых в ходе решения — поиска оптимального плана — при неполном учете отдельных ограничений. Например, подсчитывают, каков был бы результат решения отраслевой задачи, если бы изменились ограничения на капитальные вложения, сырье или другие ресурсы. Это выявляет целесообразность установления тех или иных ограничений задачи с народнохозяйственной точки зрения.
[ http://slovar-lopatnikov.ru/]Тематики
EN
Англо-русский словарь нормативно-технической терминологии > economico-mathematical analysis of optimal solutions
-
34 parametrical programming
параметрическое программирование
Раздел математического программирования, изучающий задачи, отличие которых от других задач состоит в следующем. Коэффициенты их целевой функции, или числовые характеристики ограничений, или и те и другие, предполагаются не постоянными величинами (как, например, в линейном программировании), а функциями, зависящими от некоторых параметров. Причем чаще всего эта зависимость носит линейный характер. П.п. позволяет в ряде случаев приблизить к реальности условия задач линейного программирования. Например, если коэффициенты целевой функции представляют собой цены некоторых продуктов, то вполне естественно бывает предположить, что эти цены не постоянны, а являются функциями параметра времени. Такая зависимость встречается при планировании производства в сельском хозяйстве, где цены на продукцию носят ярко выраженный сезонный характер. При оптимизации экономических систем, сочетающей гибкое использование детерминированных моделей со специальными методами учета случайных факторов, П.п. используется для выявления семейства оптимальных решений (каждое из которых соответствует некоторому сочетанию условий задачи), зависящих от изменения одного или нескольких параметров. Такое семейство оптимальных решений составляет зону неопределенности, анализ которой позволяет отказаться от части вариантов и тем самым упростить решение задачи. Важной областью П.п. является также анализ устойчивости решений оптимизационных задач. Цель такого анализа состоит в определении интервала (области) значений того или иного параметра, в пределах которого решение остается оптимальным.
[ http://slovar-lopatnikov.ru/]Тематики
EN
Англо-русский словарь нормативно-технической терминологии > parametrical programming
-
35 plc
- связь по ЛЭП
- программируемый логический контроллер
- несущая в канале ВЧ-связи по ЛЭП
- маскирование потери пакета
- контроллер с программируемой логикой
- акционерная компания с ограниченной ответственностью
акционерная компания с ограниченной ответственностью
AG - аббревиатура для обозначения AKTIENGESELLSCHAFT (акционерное общество). Оно пишется после названия немецких, австрийских или швейцарских компаний и является эквивалентом английской аббревиатуры plc (public limited company-акционерная компания с ограниченной ответственностью). Сравни: GmbH.
[ http://www.vocable.ru/dictionary/533/symbol/97]Тематики
EN
DE
- AG
контроллер с программируемой логикой
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
маскирование потери пакета
Метод сокрытия факта потери медиапакетов путем генерирования синтезируемых пакетов (МСЭ-T G.1050).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
несущая в канале ВЧ-связи по ЛЭП
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999]Тематики
- электротехника, основные понятия
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего. Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы. Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7. Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series. Рис. 4. Резервированный контроллер FCP270.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA). Рис. 5. Контроллер AC800M.
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
связь по ЛЭП
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
Англо-русский словарь нормативно-технической терминологии > plc
36 programmable logic controller
контроллер с программируемой логикой
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > programmable logic controller
37 programmable controller
программируемый контроллер
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > programmable controller
38 storage-programmable logic controller
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > storage-programmable logic controller
39 automated data management system
- автоматизированная система управления данными
- автоматизированная система управления
- автоматизированная система обработки данных
автоматизированная система обработки данных
—
[Е.С.Алексеев, А.А.Мячев. Англо-русский толковый словарь по системотехнике ЭВМ. Москва 1993]
автоматизированная система обработки данных
АСОД
Cистема обработки данных, основанная на использовании электронных вычислительных машин (компьютеров) в отличие от систем, где обработка данных ручная. Возможны два принципа организации такой обработки. В первом случае информация собирается и обрабатывается специально для решения каждой задачи, во втором — для решения различных задач наряду с переменной (специфической для каждой задачи) информацией используются общие нормативно-справочные (условно-постоянные) данные. В последнем случае система называется интегрированной (см. Интегрированная система обработки данных). АСОД применяются в планировании и управлении (автоматизированные системы управления), в научных исследованиях (автоматизированные системы сбора и обработки экспериментальных данных и системы автоматизации испытаний), в библиотечном деле и информационных службах (см. Информационно-поисковые cистемы), в проектировании (системы автоматизированного проектирования и конструкторских работ) и других областях. В статистических публикациях последних лет применяется близкий термин АСОИ (автоматизированные системы обработки информации), под которым понимаются системы, не обязательно связанные собственно с управлением теми или иными объектами (предприятиями, организациями, технологическими процессами).
[ http://slovar-lopatnikov.ru/]Тематики
Синонимы
EN
автоматизированная система, управляющая
АСУ
Управляющая система, часть функций которой, главным образом функцию принятия решений, выполняет человек-оператор.
Примечание
В зависимости от объектов управления различают, например: АСУ П, когда объектом управления является предприятие; АСУ ТП, когда объектом управления является технологический процесс; ОАСУ, когда объектом управления является организационный объект или комплекс.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления. Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]
автоматизированная система управления
АСУ
Совокупность математических методов, технических средств (компьютеров, средств связи, устройств отображения информации и т. д.) и организационных комплексов, обеспечивающих рациональное управление сложным объектом (процессом) в соответствии с заданной целью. АСУ принято делить на основу и функциональную часть. В основу входят информационное, техническое и математическое обеспечение. К функциональной части относят набор взаимосвязанных программ, автоматизирующих конкретные функции управления (планирование, финансово-бухгалтерскую деятельность и др.). Различают АСУ объектами (технологическими процессами - АСУТП, предприятием - АСУП, отраслью - ОАСУ) и функциональными автоматизированными системами, например, проектирования, расчетов, материально-технического и др. обеспечения.
[ http://www.morepc.ru/dict/]
автоматизированная система управления
АСУ
Система управления, в которой применяются современные автоматические средства обработки данных и экономико-математические методы для решения основных задач управления производственно-хозяйственной деятельностью. Это человеко-машинная система: в ней ряд операций и действий передается для исполнения машинам и другим устройствам (особенно это относится к так называемым рутинным, повторяющимся, стандартным операциям расчетов), но главное решение всегда остается за человеком. Этим АСУ отличаются от автоматических систем, т.е. таких технических устройств, которые действуют самостоятельно, по установленной для них программе, без вмешательства человека. АСУ подразделяются прежде всего на два класса: автоматизированные системы организационного управления и автоматизированные системы управления технологическими процессами (последние часто бывают автоматическими, первые ими принципиально быть не могут). Традиционно термин АСУ закрепился за первым из названных классов. Отличие АСУ от обычной, неавтоматизированной, но также использующей ЭВМ, системы управления показано на рис. А.1, а, б. Стрелками обозначены потоки информации. В первом случае компьютер используется для решения отдельных задач управления, например для производства плановых расчетов, результаты которых рассматриваются органом управления и либо принимаются, либо отвергаются. При этом необходимые данные собираются специально для решения каждой задачи и вводятся в компьютер, а потом за ненадобностью уничтожаются. Во втором случае существенная часть информации от объекта управления собирается непосредственно вычислительным центром, в том числе по каналам связи. При этом нет необходимости каждый раз вводить в компьютер все данные: часть из них (цены, нормативы и т. п.) хранится в ее запоминающем устройстве. Из вычислительного центра выработанные задания поступают, с одной стороны, в орган управления, а с другой (обычно через контрольное звено) — к объекту управления. В свою очередь информация, поступающая от объекта управления, влияет на принимаемые решения, т.е. здесь используется кибернетический принцип обратной связи. Это — АСУ. Принято рассматривать каждую АСУ одновременно в двух аспектах: с точки зрения ее функций — того, что и как она делает, и с точки зрения ее схемы, т.е. с помощью каких средств и методов эти функции реализуются. Соответственно АСУ подразделяют на две группы подсистем — функциональные и обеспечивающие. Создание АСУ на действующем экономическом объекте (в фирме, на предприятии, в банке и т.д.) — не разовое мероприятие, а длительный процесс. Отдельные подсистемы АСУ проектируются и вводятся в действие последовательными очередями, в состав функций включаются также все новые и новые задачи; при этом АСУ органически «вписывается» в систему управления. Обычно первые очереди АСУ ограничиваются решением чисто информационных задач. В дальнейшем их функции усложняются, включая использование оптимизационных расчетов, элементов оптимального управления. Степень участия АСУ в процессах управления может быть весьма различной, вплоть до самостоятельной выдачи компьютером, на основе получаемых им данных, оперативных управляющих «команд». Поскольку внедрение АСУ требует приспособления документации для машинной обработки, создаются унифицированные системы документации, а также классификаторы технико-экономической информации и т.д. Экономическая эффективность АСУ определяется прежде всего ростом эффективности самого производства в результате лучшей загрузки оборудования, повышения ритмичности, сокращения незавершенного производства и других материальных запасов, повышения качества продукции. РисА.1. Системы управления с использованием компьютеров а — неавтоматизированная, б — автоматизированная; I — управляющий центр; II — автоматизированная управляемая система (например, производство), III — контроль; тонкая черная стрелка — канал непосредственного управления компьютером некоторыми технологическими процессами (бывает не во всех АСУ); тонкая пунктирная стрелка показывает ту часть информации, которая поступает непосредственно в центр, минуя компьютер.
[ http://slovar-lopatnikov.ru/]Тематики
Синонимы
EN
автоматизированная система управления данными
—
[Л.Г.Суменко. Англо-русский словарь по информационным технологиям. М.: ГП ЦНИИС, 2003.]Тематики
EN
Англо-русский словарь нормативно-технической терминологии > automated data management system
40 power management
контроль потребления электроэнергии
контроль энергопотребления
—
[Интент]Тематики
Синонимы
EN
управление электропитанием
-
[Интент]
Управление электропитанием ЦОД
Автор: Жилкина Наталья
Опубликовано 23 апреля 2009 года
Источники бесперебойного питания, функционирующие в ЦОД, составляют важный элемент общей системы его энергообеспечения. Вписываясь в контур управления ЦОД, система мониторинга и управления ИБП становится ядром для реализации эксплуатационных функций.
Три задачи
Системы мониторинга, диагностики и управления питанием нагрузки решают три основные задачи: позволяют ИБП выполнять свои функции, оповещать персонал о происходящих с ними событиях и посылать команды для автоматического завершения работы защищаемого устройства.
Мониторинг параметров ИБП предполагает отображение и протоколирование состояния устройства и всех событий, связанных с его изменением. Диагностика реализуется функциями самотестирования системы. Управляющие же функции предполагают активное вмешательство в логику работы устройства.Многие специалисты этого рынка, отмечая важность процедуры мониторинга, считают, что управление должно быть сведено к минимуму. «Функция управления ИБП тоже нужна, но скорее факультативно, — говорит Сергей Ермаков, технический директор компании Inelt и эксперт в области систем Chloride. — Я глубоко убежден, что решения об активном управляющем вмешательстве в работу систем защиты электропитания ответственной нагрузки должен принимать человек, а не автоматизированная система. Завершение работы современных мощных серверов, на которых функционируют ответственные приложения, — это, как правило, весьма длительный процесс. ИБП зачастую не способны обеспечивать необходимое для него время, не говоря уж о времени запуска какого-то сервиса». Функция же мониторинга позволяет предотвратить наступление нежелательного события — либо, если таковое произошло, проанализировать его причины, опираясь не на слова, а на запротоколированные данные, хранящиеся в памяти адаптера или файлах на рабочей станции мониторинга.
Эту точку зрения поддерживает и Алексей Сарыгин, технический директор компании Radius Group: «Дистанционное управление мощных ИБП — это вопрос, к которому надо подходить чрезвычайно аккуратно. Если функции дистанционного мониторинга и диспетчеризации необходимы, то практика предоставления доступа персоналу к функциям дистанционного управления представляется радикально неверной. Доступность модулей управления извне потенциально несет в себе риск нарушения безопасности и категорически снижает надежность системы. Если существует физическая возможность дистанционно воздействовать на ИБП, на его параметры, отключение, снятие нагрузки, закрытие выходных тиристорных ключей или блокирование цепи байпаса, то это чревато потерей питания всего ЦОД».
Практически на всех трехфазных ИБП предусмотрена кнопка E.P.O. (Emergency Power Off), дублер которой может быть выведен на пульт управления диспетчерской. Она обеспечивает аварийное дистанционное отключение блоков ИБП при наступлении аварийных событий. Это, пожалуй, единственная возможность обесточить нагрузку, питаемую от трехфазного аппарата, но реализуется она в исключительных случаях.
Что же касается диагностики электропитания, то, как отмечает Юрий Копылов, технический директор московского офиса корпорации Eaton, в последнее время характерной тенденцией в управляющем программном обеспечении стал отказ от предоставления функций удаленного тестирования батарей даже системному администратору.
— Адекватно сравнивать состояние батарей необходимо под нагрузкой, — говорит он, — сам тест запускать не чаще чем раз в два дня, а разряжать батареи надо при одном и том же токе и уровне нагрузки. К тому же процесс заряда — довольно долгий. Все это не идет батареям на пользу.Средства мониторинга
Производители ИБП предоставляют, как правило, сразу несколько средств мониторинга и в некоторых случаях даже управления ИБП — все они основаны на трех основных методах.
В первом случае устройство подключается напрямую через интерфейс RS-232 (Com-порт) к консоли администратора. Дальность такого подключения не превышает 15 метров, но может быть увеличена с помощью конверторов RS-232/485 и RS-485/232 на концах провода, связывающего ИБП с консолью администратора. Такой способ обеспечивает низкую скорость обмена информацией и пригоден лишь для топологии «точка — точка».
Второй способ предполагает использование SNMP-адаптера — встроенной или внешней интерфейсной карты, позволяющей из любой точки локальной сети получить информацию об основных параметрах ИБП. В принципе, для доступа к ИБП через SNMP достаточно веб-браузера. Однако для большего комфорта производители оснащают свои системы более развитым графическим интерфейсом, обеспечивающим функции мониторинга и корректного завершения работы. На базе SNMP-протокола функционируют все основные системы мониторинга и управления ИБП, поставляемые штатно или опционально вместе с ИБП.
Стандартные SNMP-адаптеры поддерживают подключение нескольких аналоговых или пороговых устройств — датчик температуры, движения, открытия двери и проч. Интеграция таких устройств в общую систему мониторинга крупного объекта (например, дата-центра) позволяет охватить огромное количество точек наблюдения и отразить эту информацию на экране диспетчера.
Большое удобство предоставляет метод эксплуатационного удаленного контроля T.SERVICE, позволяющий отследить работу оборудования посредством телефонной линии (через модем GSM) или через Интернет (с помощью интерфейса Net Vision путем рассылки e-mail на электронный адрес потребителя). T.SERVICE обеспечивает диагностирование оборудования в режиме реального времени в течение 24 часов в сутки 365 дней в году. ИБП автоматически отправляет в центр технического обслуживания регулярные отчеты или отчеты при обнаружении неисправности. В зависимости от контролируемых параметров могут отправляться уведомления о неправильной эксплуатации (с пользователем связывается опытный специалист и рекомендует выполнить простые операции для предотвращения ухудшения рабочих характеристик оборудования) или о наличии отказа (пользователь информируется о состоянии устройства, а на место установки немедленно отправляется технический специалист).Профессиональное мнение
Наталья Маркина, коммерческий директор представительства компании SOCOMEC
Управляющее ПО фирмы SOCOMEC легко интегрируется в общий контур управления инженерной инфраструктурой ЦОД посредством разнообразных интерфейсов передачи данных ИБП. Установленное в аппаратной или ЦОД оборудование SOCOMEC может дистанционно обмениваться информацией о своих рабочих параметрах с системами централизованного управления и компьютерными сетями посредством сухих контактов, последовательных портов RS232, RS422, RS485, а также через интерфейс MODBUS TCP и GSS.
Интерфейс GSS предназначен для коммуникации с генераторными установками и включает в себя 4 входа (внешние контакты) и 1 выход (60 В). Это позволяет программировать особые процедуры управления, Global Supply System, которые обеспечивают полную совместимость ИБП с генераторными установками.
У компании Socomec имеется широкий выбор интерфейсов и коммуникационного программного обеспечения для установки диалога между ИБП и удаленными системами мониторинга промышленного и компьютерного оборудования. Такие опции связи, как панель дистанционного управления, интерфейс ADC (реконфигурируемые сухие контакты), обеспечивающий ввод и вывод данных при помощи сигналов сухих контактов, интерфейсы последовательной передачи данных RS232, RS422, RS485 по протоколам JBUS/MODBUS, PROFIBUS или DEVICENET, MODBUS TCP (JBUS/MODBUS-туннелирование), интерфейс NET VISION для локальной сети Ethernet, программное обеспечение TOP VISION для выполнения мониторинга с помощью рабочей станции Windows XP PRO — все это позволяет контролировать работу ИБП удобным для пользователя способом.
Весь контроль управления ИБП, ДГУ, контроль окружающей среды сводится в единый диспетчерский пункт посредством протоколов JBUS/MODBUS.
Индустриальный подход
Третий метод основан на использовании высокоскоростной индустриальной интерфейсной шины: CANBus, JBus, MODBus, PROFIBus и проч. Некоторые модели ИБП поддерживают разновидность универсального smart-слота для установки как карточек SNMP, так и интерфейсной шины. Система мониторинга на базе индустриальной шины может быть интегрирована в уже существующую промышленную SCADA-систему контроля и получения данных либо создана как заказное решение на базе многофункциональных стандартных контроллеров с выходом на шину. Промышленная шина через шлюзы передает информацию на удаленный диспетчерский пункт или в систему управления зданием (Building Management System, BMS). В эту систему могут быть интегрированы и контроллеры, управляющие ИБП.
Универсальные SCADA-системы поддерживают датчики и контроллеры широкого перечня производителей, но они недешевы и к тому же неудобны для внесения изменений. Но если подобная система уже функционирует на объекте, то интеграция в нее дополнительных ИБП не представляет труда.
Сергей Ермаков, технический директор компании Inelt, считает, что применение универсальных систем управления на базе промышленных контроллеров нецелесообразно, если используется для мониторинга только ИБП и ДГУ. Один из практичных подходов — создание заказной системы, с удобной для заказчика графической оболочкой и необходимым уровнем детализации — от карты местности до поэтажного плана и погружения в мнемосхему компонентов ИБП.
— ИБП может передавать одинаковое количество информации о своем состоянии и по прямому соединению, и по SNMP, и по Bus-шине, — говорит Сергей Ермаков. — Применение того или иного метода зависит от конкретной задачи и бюджета. Создав первоначально систему UPS Look для мониторинга ИБП, мы интегрировали в нее систему мониторинга ДГУ на основе SNMP-протокола, после чего по желанию одного из заказчиков конвертировали эту систему на промышленную шину Jbus. Новое ПО JSLook для мониторинга неограниченного количества ИБП и ДГУ по протоколу JBus является полнофункциональным средством мониторинга всей системы электроснабжения объекта.Профессиональное мение
Денис Андреев, руководитель департамента ИБП компании Landata
Практически все ИБП Eaton позволяют использовать коммуникационную Web-SNMP плату Connect UPS и датчик EMP (Environmental Monitoring Probe). Такой комплект позволяет в числе прочего осуществлять мониторинг температуры, влажности и состояния пары «сухих» контактов, к которым можно подключить внешние датчики.
Решение Eaton Environmental Rack Monitor представляет собой аналог такой связки, но с существенно более широким функционалом. Внешне эта система мониторинга температуры, влажности и состояния «сухих» контактов выполнена в виде компактного устройства, которое занимает минимум места в шкафу или в помещении.
Благодаря наличию у Eaton Environmental Rack Monitor (ERM) двух выходов датчики температуры или влажности можно разместить в разных точках стойки или помещения. Поскольку каждый из двух датчиков имеет еще по два сухих контакта, с них дополнительно можно принимать сигналы от датчиков задымления, утечки и проч. В центре обработки данных такая недорогая система ERM, состоящая из неограниченного количества датчиков, может транслировать информацию по протоколу SNMP в HTML-страницу и позволяет, не приобретая специального ПО, получить сводную таблицу измеряемых величин через веб-браузер.
Проблему дефицита пространства и высокой плотности размещения оборудования в серверных и ЦОД решают системы распределения питания линейки Eaton eDPU, которые можно установить как внутри стойки, так и на группу стоек.
Все модели этой линейки представляют четыре семейства: системы базового исполнения, системы с индикацией потребляемого тока, с мониторингом (локальным и удаленным, по сети) и управляемые, с возможностью мониторинга и управления электропитанием вплоть до каждой розетки. С помощью этих устройств можно компактным способом увеличить количество розеток в одной стойке, обеспечить контроль уровня тока и напряжения критичной нагрузки.
Контроль уровня потребляемой мощности может осуществляться с высокой степенью детализации, вплоть до сервера, подключенного к конкретной розетке. Это позволяет выяснить, какой сервер перегревается, где вышел из строя вентилятор, блок питания и т. д. Программным образом можно запустить сервер, подключенный к розетке ePDU. Интеграция системы контроля ePDU в платформу управления Eaton находится в процессе реализации.Требование объекта
Как поясняет Олег Письменский, в критичных объектах, таких как ЦОД, можно условно выделить две области контроля и управления. Первая, Grey Space, — это собственно здание и соответствующая система его энергообеспечения и энергораспределения. Вторая, White Space, — непосредственно машинный зал с его системами.
Выбор системы управления энергообеспечением ЦОД определяется типом объекта, требуемым функционалом системы управления и отведенным на эти цели бюджетом. В большинстве случаев кратковременная задержка между наступлением события и получением информации о нем системой мониторинга по SNMP-протоколу допустима. Тем не менее в целом ряде случаев, если характеристики объекта подразумевают непрерывность его функционирования, объект является комплексным и содержит большое количество элементов, требующих контроля и управления в реальном времени, ни одна стандартная система SNMP-мониторинга не обеспечит требуемого функционала. Для таких объектов применяют системы управления real-time, построенные на базе программно-аппаратных комплексов сбора данных, в том числе c функциями Softlogic.
Системы диспетчеризации и управления крупными объектами реализуются SCADA-системами, широкий перечень которых сегодня присутствует на рынке; представлены они и в портфеле решений Schneider Electric. Тип SCADA-системы зависит от класса и размера объекта, от количества его элементов, требующих контроля и управления, от уровня надежности. Частный вид реализации SCADA — это BMS-система(Building Management System).
«Дата-центры с объемом потребляемой мощности до 1,5 МВт и уровнем надежности Tier I, II и, с оговорками, даже Tier III, могут обслуживаться без дополнительной SCADA-системы, — говорит Олег Письменский. — На таких объектах целесообразно применять ISX Central — программно-аппаратный комплекс, использующий SNMP. Если же категория и мощность однозначно предполагают непрерывность управления, в таких случаях оправданна комбинация SNMP- и SCADA-системы. Например, для машинного зала (White Space) применяется ISX Central с возможными расширениями как Change & Capacity Manager, в комбинации со SCADA-системой, управляющей непосредственно объектом (Grey Space)».Профессиональное мнение
Олег Письменский, директор департамента консалтинга APC by Schneider Electric в России и СНГ
Подход APC by Schneider Electric к реализации полномасштабного полноуправляемого и надежного ЦОД изначально был основан на базисных принципах управления ИТ-инфраструктурой в рамках концепции ITIL/ITSM. И история развития системы управления инфраструктурой ЦОД ISX Manager, которая затем интегрировалась с программно-аппаратным комплексом NetBotz и трансформировалась в портал диспетчеризации ISX Central, — лучшее тому доказательство.
Первым итогом поэтапного приближения к намеченной цели стало наращивание функций контроля параметров энергообеспечения. Затем в этот контур подключилась система управления кондиционированием, система контроля параметров окружающей среды. Очередным шагом стало измерение скорости воздуха, влажности, пыли, радиации, интеграция сигналов от камер аудио- и видеонаблюдения, системы управления блоками розеток, завершения работы сервера и т. д.
Эта система не может и не должна отвечать абсолютно всем принципам ITSM, потому что не все они касаются существа поставленной задачи. Но как только в отношении политик и некоторых тактик управления емкостью и изменениями в ЦОД потребовался соответствующий инструментарий — это нашло отражение в расширении функционала ISX Central, который в настоящее время реализуют ПО APC by Schneider Electric Capacity Manager и APC by Schneider Electric Change Manager. С появлением этих двух решений, интегрированных в систему управления реальным объектом, АРС предоставляет возможность службе эксплуатации оптимально планировать изменения количественного и качественного состава оборудования машинного зала — как на ежедневном оперативном уровне, так и на уровне стратегических задач массовых будущих изменений.
Решение APC by Schneider Electric Capacity обеспечивает автоматизированную обработку информации о свободных ресурсах инженерной инфраструктуры, реальном потреблении мощности и пространстве в стойках. Обращаясь к серверу ISX Central, системы APC by Schneider Electric Capacity Manager и APC by Schneider Electric Change Manager оценивают степень загрузки ИБП и систем охлаждения InRow, прогнозируют воздействие предполагаемых изменений и предлагают оптимальное место для установки нового или перестановки имеющегося оборудования. Новые решения позволяют, выявив последствия от предполагаемых изменений, правильно спланировать замену оборудования в ЦОД.
Переход от частного к общему может потребовать интеграции ISX Central в такие, например, порталы управления, как Tivoli или Open View. Возможны и другие сценарии, когда ISX Central вписывается и в SCADA–систему. В этом случае ISX Central выполняет роль диспетчерской настройки, функционал которой распространяется на серверную комнату, но не охватывает целиком периметр объекта.Случай из практики
Решение задачи управления энергообеспечением ЦОД иногда вступает в противоречие с правилами устройств электроустановок (ПУЭ). Может оказаться, что в соответствии с ПУЭ в ряде случаев (например, при компоновке щитов ВРУ) необходимо обеспечить механические блокировки. Однако далеко не всегда это удается сделать. Поэтому такая задача часто требует нетривиального решения.
— В одном из проектов, — вспоминает Алексей Сарыгин, — где система управления включала большое количество точек со взаимными пересечениями блокировок, требовалось не допустить снижения общей надежности системы. В этом случае мы пришли к осознанному компромиссу, сделали систему полуавтоматической. Там, где это было возможно, присутствовали механические блокировки, за пультом дежурной смены были оставлены функции мониторинга и анализа, куда сводились все данные о положении всех автоматов. Но исполнительную часть вывели на отдельную панель управления уже внутри ВРУ, где были расположены подробные пользовательские инструкции по оперативному переключению. Таким образом мы избавились от излишней автоматизации, но постарались минимизировать потери в надежности и защититься от ошибок персонала.
[ http://www.computerra.ru/cio/old/products/infrastructure/421312/]Тематики
EN
Англо-русский словарь нормативно-технической терминологии > power management
СтраницыСм. также в других словарях:
Решение экспертной задачи — процесс поиска ответа на вопрос, поставленный перед экспертом. Решение общей задачи экспертизы требует решения промежуточных задач (подзадач), что достигается с помощью разработанных наукой правил (алгоритмов) либо правил, установленных… … Криминалистическая энциклопедия
Решение задач — процесс выполнения действий или мыслительных операций, направленный на достижение цели, заданной в рамках проблемной ситуации задачи; является составной частью мышления. С точки зрения когнитивного подхода процесс решения задач является наиболее… … Википедия
Этапы решение задач на ЭВМ — Значимость предмета статьи поставлена под сомнение. Пожалуйста, покажите в статье значимость её предмета, добавив в неё доказательства значимости по частным критериям значимости или, в случае если частные критерии значимости для… … Википедия
Решение проблем — Решение задач процесс, являющийся составной частью мышления; выполнение действий или мыслительных операций, направленное на достижение цели, заданной в рамках проблемной ситуации. С точки зрения когнитивного подхода процесс решения задач является … Википедия
Решение командира — определение командиром замысла действий и способов его выполнения в конкретно сложившейся боевой обстановке. В своем решении командир обычно предусматривает: какие цели в расположении противника являются наиболее важными, какие средства… … Краткий словарь оперативно-тактических и общевоенных терминов
задачи этнопсихологии как науки — направления ее развития, отражающие в своем содержании главные приоритетные интересы и включающие: 1) исследование мотивационно фоновых, интеллектуально познавательных, эмоционально волевых и коммуникативно поведенческих национально… … Этнопсихологический словарь
ЗАДАЧИ ЭТНОПСИХОЛОГИИ КАК НАУКИ — направления ее развития, отражающие в своем содержании главные приоритетные интересы и включающие: 1) исследование мотивационно фоновых, интеллектуально познавательных, эмоционально волевых и коммуникативно поведенческих национально… … Энциклопедический словарь по психологии и педагогике
Решение треугольников — (лат. solutio triangulorum) исторический термин, означающий решение главной тригонометрической задачи: по известным данным о треугольнике (стороны, углы и т. д.) найти остальные его характеристики[1]. Треугольник может располагаться на… … Википедия
Задачи тысячелетия — Равенство классов P и NP Гипотеза Ходжа Гипотеза Пуанкаре Гипотеза Римана Квантовая теория Янга Миллса Существование и гладкость решений уравнений Навье Стокса Гипотеза Бёрча Свиннертон Дайера Задачи тысячелетия (Millennium Prize… … Википедия
РЕШЕНИЕ КОМПЛЕКСНЫХ ЗАДАЧ — (англ. complex problem solving) решение систем взаимосвязанных задач, относящихся сразу ко многим областям, которые ранее в такую систему не объединялись. Подзадачи, входящие в систему, характеризуются разнородностью представляемых ими предметных … Большая психологическая энциклопедия
Задачи о рыцарях и лжецах — Задачи о рыцарях и лжецах разновидность олимпиадных математических задач, в которых фигурируют персонажи: Лжец человек (или иное существо), всегда говорящий ложь. и его антагонист Рыцарь, всегда говорящий правду. Решение подобных… … Википедия
 18+© Академик, 2000-2024
18+© Академик, 2000-2024- Обратная связь: Техподдержка, Реклама на сайте
Экспорт словарей на сайты, сделанные на PHP, Joomla, Drupal, WordPress, MODx.
Перевод: с английского на русский
с русского на английский- С русского на:
- Английский
- С английского на:
- Русский