-
1 контроль ввода данных
Information technology: data input check, data input checkingУниверсальный русско-английский словарь > контроль ввода данных
-
2 контроль ввода данных
ncomput. (правильности) DateneingabekontrolleУниверсальный русско-немецкий словарь > контроль ввода данных
-
3 контроль ввода данных
Dictionnaire russe-français universel > контроль ввода данных
-
4 визуальный контроль ввода данных
adjecon. EingabesichtkontrolleУниверсальный русско-немецкий словарь > визуальный контроль ввода данных
-
5 контроль в процессе обработки данных
Русско-английский большой базовый словарь > контроль в процессе обработки данных
-
6 контроль по четности блока данных
Русско-английский большой базовый словарь > контроль по четности блока данных
-
7 среда для записи вводимых данных
Русско-английский большой базовый словарь > среда для записи вводимых данных
-
8 редактирование входных данных
Русско-английский большой базовый словарь > редактирование входных данных
-
9 входные данные
1. data inспецификация данных; определение данных — data specification
совокупность данных; данные объединенные в пул — pooled data
2. entries3. data inputродовой тип данных; данные родового типа — generic data type
4. input5. input dataобласть определения данных; предметная область — data domain
данные о схеме; данные в схематическом виде — schematic data
-
10 речевые входные данные
Русско-английский большой базовый словарь > речевые входные данные
-
11 режим
mode, condition, regime,
function, operation, rating, setting
- (вид работы аппаратуры, системы) — mode
- (заданные условия работы двигателя при определенном положении рычага управнения двигателем) — power setting. in changing the power setting, the power-control lever must be moved in the manner prescribed.
- (мощность или тяга двигателя в сочетании с определениями как взлетный, крейсерский максимально-продолжитепьный) — power, thrust. takeoff power /thrust/. maximum continuous power /thrust/
- (номинальный, паспортный, расчетный) — rating
работа в заданном пределе рабочих характеристик в определенных условиях. — rating is а designated limit of operating characteristics based оп definite conditions.
- (номинальная мощность или тяга двигателя, приведенная к стандартным атмосферным условиям) — power rating. power ratings are based upon standard atmospheric conditions.
- (при нанесении покрытия) — condition
- (работы агрегата по производительности) — rating. pump may be operated at low or high ratings.
- (тяги двигателя при апрелеленном положении руд) — thrust. run the engine at the takeoff thrust.
- (частота действий) — rate
- автоматического захода на посадку — automatic approach (eondition)
- автоматического обмена данными с взаимодействующими системами (напр., ins, tacan) — (mode of) transmission and/or reception of specifled data between systems in installations such as dual ons, ins, tacan, etc.
- автоматического управления полетом — automatic flight condition
- автоматической выставки (инерциальной системы) — self-alignment mode
- автоматической работы двигателя. — engine governed speed condition
at any steady running condition below governed speed.
- автоматической (бортовой) системы управления (абсу, сау) — afcs (automatic flight control system) mode
- автомодуляции — self-modulation condition
-, автономный (системы) — autonomus /independent/ mode
-, автономный (системы сау) — independent control mode
- авторотации (вертолета) — autorotation, autorotative condition
заход на посадку производится с выключенным двигателем на режиме авторотации несущего винта. — the approach and landing made with power off and entered from steady autorotation.
- авторотации (воздушного винта, ротора гтд, вращающегося под воздействием набегающего воздушного потока) — windmilling. propeller ог engine rotor(s) freely rotating because of а wind or airstream passing over the blades.
-, астроинерциальный — stellar inertial mode
- астрокоррекции — stellar monitoring mode
-, бесфорсажный (без включения форсажной камеры) — cold power /thrust/, попafterburning power /thrust/
-, бесфорсажный (без впрыска воды или воднометаноловой смеси на вход двигателя) — dry power, dry thrust
- бов (блока опасной высоты) — alert altitude (select) mode
-, боевой (работы двигателя) — combat /military/ rating, combat /military/ power setting
- бокового управления (системы сту) — lateral mode. the lateral modes of fd system are: heading, vor/loc, and approach.
- большой тяги (двиг.) — high power setting
- буферного подзаряда аккумулятора — battery trickle charge (condition)
- быстрого согласования (гиpoагрегата) — fast slave mode
- ввода данных — data entry mode
- вертикальной скорости (автопилота) — vertical speed (vs) mode
-, вертикальный (системы сду или сту) — vertical mode. the basic vertical modes are mach, ias, vs. altitude, pitch
-, взлетный (двигателя) — takeoff power
-, взлетный (тяга двиг.) — takeoff thrust
-, взлетный (полета) — takeoff condition
- висения (вертолета) — hovering
- "вк" (работы базовой системы курса и вертикали (бскв) при коррекции от цвм) — cmptr mode
-, внешний (работы сау) — coupled /interface/ control mode
-, возможный в эксплуатации) — condition (reasonably) expected in operation
- вор-илс (работы директорией системы) — vor-loc mode, v/l mode
- воспроизведения (магн. записи) — playback mode
- выдерживания (высоты, скорости) — (altitude, speed) hold mode
- выдерживания заданного курса — hog hold mode
- "выставка" (инерциальной системы) — alignment /align/ mode
в режиме "выставка" система автоматически согласуется e заданными навигационными координатами и производится выставка гироскопических приборов, — in align mode system automatically aligned with reference to navigation coordinates and inertial instruments are automatically calibrated.
- выставки, автоматический (инерциальной навигационной системы) — self-alignment mode. the align status can be observed any time the system is in self-alignment mode.
- вычисления параметров ветpa — wind calculator mode. wind calculator mode is based on manually entered values of tas
- вызова (навигационных параметров на индикаторы) — call mode
- вызова на индикаторы навигационных параметров без нарушения нормального самолетовождения (сист. омега) — remote mode. position "r" enables transmission and/or reception of specified data between systems in installations such as dual ons, ins/ons, etc.
-, генераторный (стартер-генератора) — generator mode
стартер-генератор может работать в генераторном или стартерном режиме, — starter-generator can operate in generator mode or in motor mode (motorizing functi on).
-, гиперболический (работы системы омега) — hyperbolic mode. in the primary hyperbolic mode the position supplied at initialization needs only to be accurate to within 4 nm.
- гиромагнитного (индукционного) компаса (гmk) — gyro-flux gate (compass) mode
- гиромагнитной коррекции (гмк) — magnetic slaved mode (mag)
- гmк (гиромагнитного компаca) — gyro-flux gate (compass) mode
- горизонтального полета — level flight condition
- горячего резерва (рлс) — standby (stby) mode
- гпк (гирополукомпаса) — dg (directional gyro) mode, free gyro mode of operation
- "да-нет" (работы, напр., сигнальной лампы) — "yes-no" operation mode
-, дальномерный (дме) — dме mode
-, дальномерный (счисления пути) (системы омега) — dead reckoning mode, dr mode of operation, relative mode
- двигателя (no мощности или тяге) — engine power /thrust/, power /thrust/ setting
- (работы двигателя) для захода на посадку — approach power setting
-, дежурный (работы оборудования) — standby rate (stby rate)
- завышенных оборотов — overspeed condition
- заниженных оборотов — underspeed condition
- заданного курса (зк) — heading mode
режим работы пилотажного командного прибора (пкп) дпя выхода на и выдерживания зк. — in the heading mode, the command bars in the flight director indicator display bank (roll) commands to turn the aircraft to and maintain this selected heading.
- заданного путевого угла (зпу) — course mode
- захвата луча глиссадного (курсового) радиомаяка — glideslope (or localizer) cарture mode
- "земля-контур" (рлс) — contour-mapping mode
- земного малого газа — ground idle power (setting)
with engines operating at ground idle (power).
- и/или тяга, максимальный продолжительный — maximum continuous power and/or thrust
-, импульсный (сигн. ламп) — light flashing
"откл. имп. режима" (надпись) — lt flash cutout
- инерциально-доплеровский (ид) — inertial-doppler mode
-, инерциальный (работы навигационной системы) — inertial mode
-, командный (автопилота) — (autopilot) command position
both autopilots in command position.
-, компасный — compass mode
в компасном режиме магнитная коррекция курса обеспечивается датчиком ид. — when compass mode is selected, magnetic monitoring is applied from detector unit.
-, компасный (apk) (автоматического радиокомпаса) — adf compass mode. the adf function switch is set to "comp" position, (to operate in the compass mode).
- "контроль" (инерц. системы) — test mode
обеспечивает автономную проверку системы без подкпючения контр.-повер. аппаратуры. — provides the system selftesting
- (-) "контур" -(работы рлс) — contour (mode) (cntr)
- коррекции (координат места) — up-dating mode
-, крейсерский (двиг.) — cruising /cruise/ power
-, крейсерский (на з-х двигатолях) (полета) — 3-engine cruise
-, крейсерский (полета) — cruising (condition)
-, крейсерский (с поэтапным увеличением оборотов при испытании двигателя) — incremental cruise power (or thrust)
-, крейсерский, номинальный (полета) — normal cruise (nc)
-, крейсерский рекомендуемый (максимальный) — (maximum) recommended cruising power
- крейсерского полета (для скоростной или максимальной дальности) — cruise method
-, критический (работы системы, двигателя) — critical condition
- критический, по углу атаки — stalling condition
- "курсовертикаль" ("kb") — attitude (атт) mode
в данном режиме от системы не требуется получение навигационных параметров. выдаются только сигналы крена (у) и тангажа (у). — in this mode ins alignment and navigation data, except attitude, are lost.
-, курса-воздушный — air data-monitored heading hoid mode
-, курсовой (при посадке по системе сп или илс) — localizer mode
- курсозадатчика (курсовой системы гмк или гик) — flux gate slaving mode. the mode when the directional gyro is slaved to the flux gate detector.
-, курсо-доплеровский — doppler-monitored heading hold mode
- магнитной коррекции (мк) — magnetic(ally) slaved mode (mag)
- максимальной (наибольшей) дальности — long range cruise (lrc). lrc is based on a speed giving 99 % of max, range in no wind and 100 % max. range in about 100 kt headwind.
- максимальной продолжительности (полета) — high-endurance cruise
-, максимальный крейсерский (mkp) (выполняется на предельной скорости) — high speed cruise (method)
-, максимальный продолжительный (мпр) (двиг.) — maximum continuous power (мcp)
-, максимальный продолжительный (по тяге) — maximum continuous thrust (мст)
increase thrust to мст.
- малого газа — idling power (setting)
попеременная работа двигателя на номинальной мощности и режиме малого газа или тяги, — one hour of alternate fiveminute periods at rated takeoff power and thrust аnd at idling power and thrust.
- малого газа на земле — ground idling power /conditions/
- малого газа при заходе на посадку — approach idling power /conditions/
- малой тяги (двиг.) — low power setting
- (-) "метео" (работы рлс) — weather (mode)
- "метео-контур" (рлс) режим — contour-weather mode
- (5-ти) минутной мощности (двиг.) — (five-) minute power
- "мк" (магнитной коррекции) — mag
- мощности, максимальный продолжительный (двиг.) — maximum continuous power
- мощности, чрезвычайный — emergency power
- набора высоты — climb condition
- "навигация" (инерциальной системы) — navigation (nav) mode
при заданном режиме система обеспечивает вычисление навигационных и директорных параметров и выдает информацию на пилотажные приборы и сау. — in this mode system computes navigation and steering data. provides attitude information to flight instruments and fcs.
- наибольшей (макеимальной) дальности — long range cruise (lrc)
горизонтальный полет на скорости наибольшей дальности, на которой километровый расход топлива при полете на заданной высоте наименьший. — а level flight at а given altitude and best range cruise speed giving the minimum kilometric fuel consumption.
- наибольшей продолжительности (полета) — high-endurance cruise
горизонтальный полет на скорости наибольшей продолжнтельности, на которой часовой расход топлива при полете на заданной высоте наименьший. — а level flight at а given altitude and high-endurance cruise speed giving the minimum fuel flow rate (in kg/h or liter/h)
- начала автоматической работы (нар режим начала автоматического регулирования работы гтд) — engine governed run/operation/ onset mode
- нвк (начальной выставки — initial heading alignment
-, непрерывной (обработки данных) — burst mods (data processing)
-, нерасчетный — off-design rating
-, неуетановившийся — unsteady condition
- (0.65) номинала, на бедной смеси — (65%) power, lean mixture setting
-, номинальный (двиг.) — (power) rating, rated power
-, номинальный (mпp) — maximum continuous power
- нормального обогрева (эп.) — normal-power heat (condition)
-, нормальный (работы агрегата) — normal rating
-, номинальный крейсерский (полета) — normal cruise (nc). used on regular legs and based on m = 0.85.
- обзора земной поверхности (рлс) — ground-mapping (map) mode
- обнаружения грозовых образеваний — thunderstorm detection mode (wx)
- "обогрев" (инерц. системы) — standby mode
режим предназначен для создания необходимых температурных условий работы элементов инерциальной системы (гироскопов, блоков автоматики и электроники). — the standby mode is а heating mode during which fast warm-up power is applied to the navigation unit until it reaches operating temperature.
- обогрева — heating mode
- обогрева лобовых стекол "слабо", "сильно" — windshield "warm up", "full power" heating rating
-, одночасовой максимальный (двиг.) — maximum one-hour power
- ожидания ввода координат исходного места самолета — initial position entry hold mode
- ожидания посадки — holding
-, оптимальный экономический (двиг.) — best economy cruising power
- освещения меньше-больше (яркость) — dim-brt light modes check lights in dim and brt modes.
-, основной навигационный (сист. "омега") — primary navigation mode
- отключенного шага (программы) — step off mode
- отсутствия сигналов ивс (системы омега) — no tas mode
- оценки дрейфа гироскопа — gyro drift evaluation mode
- перемотки (маги, ленты) — (tape) (re)wind mode
- пересиливания автопилота — autopilot overpower operation /mode/
-, переходный — transient condition
- планирования — gliding condition
- повышенных оборотов — overspeed condition
- полета — flight condition /regime/
состояние движения ла, при котором параметры, характеризующие это движение (например, скорость, высота) остаются неизменными в течение определенного времени. — it must be possible to make а smooth transition from one flight condition to any other without exceptional piloting skill, alertness, or strength.
- полета, критический — critical flight (operating) condition
- полета на курсовой маяк (при посадке) — localizer (loc) mode. flying in loc (or vor) mode.
- полета на станцию вор — vor mode
- полета, неустановившийся — unsteady flight condition
- полета по маяку вор — vor mode
- полета по системе илс — ils mode
- полета по условным меридианам — grid mode
данный режим применяется в районах, не обеспечивающих надежность компасной информации. — the grid mode can be used in areas where compass information is unreliable.
- полета, установившийся — steady flight condition
- полетного малого газа — flight idle (power)
-, полетный (двиг.) — flight power
-, пониженный (ниже номинала) (двиг.) — derating
- пониженных оборотов — underspeed condition
при возникновении режима пониженных оборотов рогулятор оборотов вызывает дополнительное открытие дроссельного крана. — for underspeed condition, the governor will cause the larger throttle opening.
-, поперечный (системы сду или сту) — lateral mode. the basic lateral modes are heading, vor/loc and approach.
-, посадочный (полета) — landing condition
- правой (левой) коррекции (оборотов двигателя вертолета) — engine operation with throttle control twist grip turned clockwise (counterclockwise)
-, практически различаемый — practically separable operating condition
к практически различаемым режимам полета относятся: взлетный, крейсерский (mapшрутный) и посадочный, — practically separable operating condition, such as takeoff, en route operation and landing.
- (работы двигателя), приведенный к стандартной атмосфере — power rating based upon standard atmospheric conditions
- приведения к горизонту — levelling
- продления глиссады — glideslope extension mode
the annunciator indicates when glideslope extension (ext) mode provides command signals to the steering computer.
- продольного управления (системы сту) — vertical mode. the vertical modes of fd system are: mach, ias, vs. altitude, pitch.
- просмотра воздушного пространства (переднего) — airspace observation mode (ahead of aircraft)
- просмотра воздушного пространства на метеообстановку (рлс) — radar weather observation mode
- просмотра земной поверхности (рлс) — ground mapping operation. the antenna is tilted downward to receive ground return signals.
- прямолинейного горизонтального полета — straight and level flight condition
- (частота) пусков ракет — (rocket firing) rate
- "работа" (положение рычага останова двигателя) — run
- "работа" (инерциальной навигационной системы) — navigate mode, nav mode. system automatically changes from alignment to navigate mode.
- работы — condition of operation
test unit in particular condition of operation.
- работы (агрегата, напр., наcoca) — rating
- работы (агрегата по продолжительности) — duty (cycle)
режим работы может быть продопжитепьным или повторно-кратковременным. — the duty cycle may be continuous or intermittent.
- работы (инерциальной системы) — mode of operation, operation mode
- работы, автоматический (двиг.) — governed speed /power/ setting
- работы автоматической системы управления (абсу, сау) — autoflight control system (afcs) mode
- работы автопилота — autopilot mode
- работы автопилота в условиях турбулентности — autopilot turbulence (turb) mode
при работе в условиях турбулентности включается демпфер рыскания для обеспечения надежной управляемости и снижения нагрузок на конструкцию ла. — use of the yaw damper with the autopilot "turb" mode will aid in maintaining stable control and in reducing structural loads.
- работы автопилота при входе в турбулентные слои атмосферы — autopilot turbulence penetration mode
данный режим применяется при полете в условиях сильной турбулентности воздуха, — use of the autopilot turbulence penetration mode is recommended for autopilot operation in severe turbulence.
- работы автопилота с директорной системой, совмещенный — ap/fd coupled mode
- работы двигателя (по мощности) — engine power (setting)
- работы двигателя (по тяге) — engine thrust (setting)
- работы двигателя (по положению руд) — engine power setting
- работы двигателя в особых условиях, (повышенный) — emergency (condition) power
- работы двигателя на земле — engine ground operation
- работы двигателя на малых оборотах — engine low speed operation
- работы двигателя, номинальный — engine rating. ths jt9d-з-за engines operate at jt9d-3 engine ratings.
- работы (двигателя), приведенный к стандартной атмосфере — power rating /setting/ based upon standard atmospheric conditions
- работы источника света, установившийся — light source operation at steady value
- работы, кратковременный — momentary operating condition
- работы no времени (агрегата) — time rating
- работы, повторно-кратковременный (агрегата) — intermittent duty
пусковая катушка работает в повторно-кратковременном режиме. — booster coil duty is intermittent.
- работы (системы), полетный — (system) flight operation
при выпуске передней опоры шасси система переключается на полетный режим, — when the nose lg is eхtended, the function of the system is transferred to flight operation.
- работы no сигналам станции омега — omega mode operation
- работы, продолжительный (агрегата) — continuous duty
генератор двигателя работает в продолжительном режиме, — the engine-driven generator duty is continuous.
- работы противообледенительной системы, нормальный — normal anti-icing
- работы противообледенительной системы, форсированный — high anti-icing
- работы самолетного ответчика (а - на внутренних линиях, в - на международных) — transponder mode (а - domestic, в - international)
- работы системы траекторного управления (сту), боковой — lateral mode
- работы сту, продольный — vertical mode
- рабочий (работы автопилота) — (autopilot) active position both autopilots in command positions, one active and one standby.
- рабочий (работы оборудования) — normal rate (norm rate)
- равновесной частоты (вращения) (двиг.) — on-speed condition
- равновесных оборотов — оп-speed condition
работа регулятора оборотов в режиме равновесных оборотов. — the constant speed governor operation under on-speed condition.
-, радиотелеграфный, тлг (автоматич. радиокомпаса) — c-w operation
-, радиотелеграфный (связи) — c-w communication, radio telegraphic communication
-, радиотелефонный, тлф (apk) — rt (radio telephone), voice operation (v), voice
-, радиотелефонный (связи) — voice communication, radio telephone communication
переключить передатчик на радиотелефонную связь, — set the transmitter for voice communication.
-, рамочный (арк) — loop mode
- распознавания светила — star identification mode
-, располагаемый максимальный продолжительный (двиг.) — available maximum continuous power
-, расчетный — rating
-, расчетный (условия работы) — design condition
- регулирования избыточного давления (системы скв) — differential pressure control (mode)
-, резервный (аварийный) (дв.) — emergency power rating
работа двигателя при гидромеханическом управлении оборотами и температурой при отказе электронной системы управления.
-, резервный (работы автопилота) — (autopilot) standby position
- самовращения (несущего винта) — autorotation, autorotative condition
- самоориентирования (переднего колеса шасси) — castoring
- скоростной дальности — high-speed cruise method
- "слабо", "сильно" (обогрева лобовых стекол) — (windshield heat) warm up, full power
- слабого обогрева (эл.) — warm-up heat (condition)
-, следящий (закрылков) — (flap) follow-up operation (mode)
when the flaps are raised, the flap follow-up system operates the slat control valve.
-, смешанный (работы спойлеров) — drag/aileron mode. а drag/aileron mode is used during descent both for retardation and lateral control.
- снижения — descent condition
-, совмещенного управления — override control mode
оперативное вмешательство в работу включенной системы.
-, совмещенный (при работе с др. системой) — coupled mode
-, совмещенной (работы автопилота) — autopilot override operation /mode/
в этом режиме отключаются рм и корректор высоты и летчик оперативно вмешивается в управление ла посредством штурвала и педалей. — то manually or otherwise deliberately overrule autopilot system and thereby render it ineffective.
-, совмещенный — both mode
(работы рлс в режимах обзора метеообразований и земной поверхности и индицирования маяков) — for operation in rad and bcn modes.
- согласования (автопилота) — synchronization mode
- согласования (работы следящей системы) — slave /synchronization/ mode
- стабилизации (крена, тайгажа, направления, автопилота) — roll (pitch, yaw) stabilization mode
- стабилизации (работы сту) — hold mode
the vertical and lateral modes are hold modes.
- стабилизации крена (в сту) — roll /bank/ (attitude) hold mode
- стабилизации курса (aп) — heading hold mode
- стабилизации тангажа (в сту) — pitch (attitude) hold mode
-, стартерный (всу) — engine start mode
apu may run in the engine start mode or as apu.
-, стартерный (стартер-гоноратора) — motor(izing) mode, (with) starter-generator operating as starter
- стопорения (работы следящей системы) — lock-out mode
- "сход(на) нзад" — return-to-selected altitude (mode)
- счисления пути (или дальномерный) (системы омега) — dead reckoning mode, dr mode of operation, relative mode
-, температурный — temperature condition
- тлг (работы арк) — c-w operation
- тлф (арк) — rt (radio telephone), voice
-, тормозной (работы спойле — drag /retardation/ mode
- управления — control mode
- управления в вертикальной плоскости (ап) — vertical mode
- управления в горизонтальной плоскости (инерциальной системы) — lateral control mode
управление по курсу, на маяки вор и крм. — the basic lateral modes are heading, vor/loc and approach.
- управления, позиционный (no командно-пилотажному прибору) — flight director control mode
- управления по крену (aп) — roll (control) mode
- управления, поперечный (автопилота) — lateral mode
- управления по тангажу (ап) — pitch (control) mode
- управления, продольный (автопилота) — vertical mode. vertical command control provides either vertical speed or pitch command.
- управления, штурвальный — manual (flight) control
-, усиленный (дополнительный, форсированный) (двиг.) — augmented power (rating)
при данном режиме увеличиваются температура газов на входе в турбину, обороты ротора или мощность на валу. — engine augmented takeoff power rating involves increase in turbine inlet temperature, rotor speed, or shaft power.
-, установленный (для данных условий испытаний двигателя) — rated power. а 30-hour run consisting of alternate periods of 5 minutes at rated takeoff power.
-, форсажный (с включенной форсажной камерой) — reheat /afterburning/ power /thrust/
-, форсажный (по тяге двиг.) — reheat thrust
-, форсажный (с впрыском воды или водометаноловой смеси на вход двигателя) — wet power, wet thrust
-, форсажный, полный (двиг.) — full reheat power /thrust/
- форсированного обогрева — full-power heat (conditions)
-, форсированный (работы агрегата) — high rating
-, форсированный (усиленный) (двиг.) — augmented power /thrust/
-, форсированный взлетный — augmented takeoff power
- холостого хода (двигателя вертолета с отключенной трансмиссией) — idle run power (with rotor drive system declutched)
- холостого хода (генератора, всу, электродвигателя) — по-load operation
-, чрезвычайный (работы двигателя в особых условиях) — emergency (condition) power
-, чрезвычайный (по тяге двигателя) — emergency thrust
-, чрезвычайный, боевой (двиг.) — combat /war/ emergency power
-, штурвальный (управления ла) — manual control mode
-, экономичный крейсерский — (best) economy cruising power
-, эксплуатационный (работы, агрегата, двигателя, самолета) — operational /operating/ condition
-, эксплуатационный (двиг.) — operational power rating
эксплуатационные режимы включают: взлетный, максимальный продолжительный (крейсерский), — operational power ratings cover takeoff, maximum continuous (and cruising) power ratings.
-, эксплуатационный полетный (двиг.) — flight power (rating)
двигатель должен нормально работать на всех эксплуатационных (полетных) режимах, — the engine must be capable of operation throughout the flight power range.
-, электромоторный (стартер генератора) — motor(izing) mode
-, элеронный (работы спойлеров) — aileron mode, lateral control augmentation mode
в p. (работы оборудования) — in mode
presently flying in heading (h) mode on a 030° heading.
в p. самоориентирования (о переднем колесе шасси) — in castor, when castoring
в пределах эксплуатационных р. — within (approved) operating limitations
выход на р. малого газа (двиг.) — engine (power) setting at idle, engine idle power setting
изменение p. работы двигатепя — change in engine power (or thrust)
метод установки (получения) (заданного p. работы двигателя) — methods for setting (engine) thrust /power/
на (взлетном) р. (двиг.) — at (takeoff) power
with the engine operating at takeoff power.
на (взлетном) р. (полета) — under (takeoff) condition
на максимальном продолжительном p. — at maximum continuous power
обороты (двигателя) на взлетном р. — takeoff (rotational) speed engine run at takeoff power with takeoff speed.
обороты (двигателя) на максимальном продолжительном p. — maximum continuous speed engine run at rated maximum continuous power with maximum continuous speed.
переключение p. (работы оборудования) — mode selection
переход (вертолета) от нормального р. к р. висения — reconversion
полет на крейсерском р. — cruise flight
полет на р. висения — hovering flight
при работе двигателя на взлетном р. — with engine at takeoff power, with takeoff power on (each) engine
при работе каждого двигателя на р., не превышающем взлетный — with not more than takeoff power on each engine
при установившемся р. работы с полной нагрузкой — at steady full-load condition
(75)% максимального продолжительного (или номинального) р. — (75) percent maximum continuous power (thrust)
работа на (взлетном) р. (двиг.) — (takeoff) power operation, operation at takeoff power
установка p. работы (двиг.) — power setting
этап p. (при испытаниях двигателя) — period. during the third and sixth takeoff power periods.
включать р. (работы аппаратуры системы) — select mode
включать р. продольного (поперечного) управления (aп, сду) — select vertical (lateral) mode
включить систему в режим (напр., "выставка") — switch the system to (align mode, switch the system to operate in (align mode)
выдерживать (взлетный) р. (двиг.) — maintain (takeoff) power
выходить на (взлетный) р. (двиг.) — come to /attain, gain/ (takeoff) power /thrust/, set engine at takeoff power /thrust/, throttle to takeoff power /thrust/
выходить на р. прямолинейного горизонтального полета гонять двигатель на (взлетном) р. — recover to straight and level flight run the engine at (takeoff) power
изменять р. работы двигателя — change engine power
изменять установленный р. (двиг.) — change power setting
лететь в автоматическом р. управления — fly automatically
лететь в курсовом р. — fly heading (н) mode
лететь в штурвальном р. — fly manually
передавать в телеграфном р. — transmit on c-w /rt/
передавать в радиотелефонном р. — transmit on voice
переключать р. — select mode
переключаться на р. — switch to mode the computer automatically switches to course mode.
переходить (автоматически) в режим (напр., курсовертикаль) — system automatically changes to атт mode
переходить с р. (малого газа) на (взлетный) р. (двиг.) — come from (idle) power to (takeoff) power
проводить р. (30 часовых) испытаний последовательно чередующимися периодами по... часов — conduct а (30-hour) run consisting of alternate periods of... hours
работать в р. — operate on /in/ mode
работать в режиме гпк — operate in dg mode, be servoed to directional gyro
работать в индикаторном р. (о сельсине) — operate as synchro indicator
работать в трансформаторном р. (о сельсине) — operate as synchro transformer
работать на (взлетном) р. (двиг.) — operate at (takeoff) power /thrust/
работать на р. малого газа — idle, operate at idle (power)
увеличивать р. работы (двиг.) (до крейсерского) — add power (to cruising), throttle (to cruising power)
уменьшать p. двигателя (до крейсерского) — reduce power to cruising
устанавливать взлетный р. (двиг.) — set takeoff power /thrust/, set engine at takeoff power
устанавливать компасный р. работы (apk) — select compass mode
устанавливать p. набора высоты — establish climb
устанавливать р. полета — establish flight condition
устанавливать рамочный р. работы (арк) — select loop mode
устанавливать (взлетный) р. работы двигателя — set (taksoff) power /thrust/, set the engine at takeoff power /thrust/
устанавливать p. снижения — establish descentРусско-английский сборник авиационно-технических терминов > режим
-
12 проверка
check (снк), test, inspection
- (раздел рэ) — adjustment/test
-, автономная (инерц. сист.) — self-testing
-, безвыборочная — random check
- биения (радиального) — check for /of/ eccentricity
- биения (скоса боковой поверхности, напр., колеса турбины) — check of swash. checking the swash of turbine wheel.
- введенных координат гпм — waypoint coordinate insertion /entry/ verification
- включения (работы) системы — system operational test
-, внерегламентная — unschedule maintenance check
проверки или осмотры самолета, его систем и агрегатов, проводимые в результате нарушения нормальных условий эксплуатации, независимо от утвержденных сроков проверок, производятся после грубых посадок, в случае удара молний в самолет, посадки с избыточным весом, столкновения с птицей и др. — those maintenance checks and inspection on the aircraft, its systems and units which are dictated by special or unusual conditions which are not related to the time limits. includes inspections and checks such as hard landing, turbulent air, lightning strike, overweight landing, bird strike
- встроенным контролем — built-in test
test the system by using its built-in test facility /ieature/.
-, выборочная — spot check, sampling inspection
-, выборочная (на работоспособность) — spot test
- гермокабины на герметичность — pressurized cabin leakage test
- готовности (ла) к полету — pre-flight check
"- заправки топливом" — fuel oty test (switch) (выключатель)
-, комплексная (систем) — combined systems checkout
-, контрольная — inspection check
- концентричности (колеса турбины, вала) — check of concentricity (of turbine wheel, shaft)
- координат места ла — aircraft position coordinate verification
- ламп — lamp test
- ламп табло (повторным включением) — annunciator lights recall. any reset annunciator lights can be recalled using the warning, caution and advisory lights test switch.
- межпопетная (перед обратным маршрутом) — turnround check
- методом "прокачек" (функциональная проверка электр. цепей) — functional test
- на выявление трещин (одним из объективных методов дефектоскопии) — inspection for cracks (by emplaying an objective method of inspection)
- на герметичность — leak test
-, наземная — ground check
-, наземная (с опробованием) — ground test
- на нспопнитепьном старте — lne-up check
- на магнитном дефектоскопе (на выявление трещин) — magnetic inspection (for cracks)
- на месте (без демонтажа изделия или агрегата с объекта) — in-situ check /test, inspection/. the on-condition check is normally an in-situ test.
- на оправке — check on mandrel
- на правильность формы и взаимного расположения поверхностей (детали) — test for truth
сюда относятся проверки на (не)плоскостность, (не)перпендикулярность, (не)параллельность, овальность и на правильность совмещения отверстий. — the methods for testing for form and alignment are used to check the flatness, squareness, angular relationship or parallelism of the part surfaces, the alignment of holes or the true circularity of round parts.
- на пробой изоляции — insulation breakdown test
- на работоспособность (для подтверждения нормальной работы изделия) — operational test. the procedure required to ascertain only that a system or unit is operable.
- на работоспособность (для подтверждения эксплуатационных характеристик) — operation test. то demonstrate the engine operational characteristics.
- (реакции двигателя) на сброс газа — deceleration test
- на слух — listening test
перебои в работе двигателя могут определяться проверкой на слух, — listening test is employed to determine the engine rough operation.
- на соответствие техническим условиям — functional test
проверка, проводимая с целью подтверждения, что система или агрегат работает в соответствии с минимально допустимыми ту. — the procedure required to ascertain that а system or unit is functioning in all aspects in accordance with minimum acceptable design specifications.
- на стоянке — ramp check /test, inspection/
simple test module provides rapid ramp check.
- на утечку (герметичность) — leak-test
- на утечку мыльной пеной — leak-test with soap suds арplied
coat the pipe with soap suds to detect leakage.
- наличия электрической цепи от...до... — check of electrical circuit between...and...for continuity
- нивелировки (заклинения) неподвижных поверхностей самолета — check of rigging of fixed surfaces
- огнетушителей (без разряда) — fire extinguisher test (firex
нажать кнопку проверка огнетушителей и в этом случае должны загораться лампы 1-я очередь и 2-я очередь срабатывания. — press the firex test button and all main and altn lights illuminate on fire extinguisher test panel.
-, перекрестная (напр., всех аналогичных приборов) — crosscheck (хснеск) crosscheck the three altimeters.
-, периодическая — periodic check
- пиропатронов (противопожарной системы) — squib test. repeat procedure with squib test switch in aft position.
- плоскостности детали на контрольной плите — check for flatness of a part surface against the face of a surface plate
для проведения данной проверки на поверхность кантрольной плиты наносится краска (берлинская лазурь), затем чистая проверяемая поверхность прижимается к контрольной плите. плоскостность проверяемой поверхности, оценивается no наличию отпечатков краски (на выступающих участках). — то make the test, smear the face of the surface plate with marking (consisting of prussian blue or redlead with oil), then wipe clean the sruface to be checked and rub it lightly on the surface plate. the truth of the surface can be estimated by the appearance of the transferred marking.
-, повторная — recheck
- под током /напряжением/ (оборудования, системы) — test /check/ of equipment energized, alive (equipment) test
- по налету — check by flight hour(s)
-по налету, регламентная — periodic /scheduled/ maintenance cheek by flight hour(s)
-, послемонтажная — post-installation check
-, послеполетная — post-flight check
- по состоянию (по мере надобности) — оn-condition check (ос)
профилактическое техническое обслуживание (контроль качества ремонта), выполняемое в виде периодических осмотров, проверок (или испытаний изделия (агрегата), на обнаружение механических дефектов (в доступных пределах) для определения допустимости дальнейшей эксппуатации изделия (до следующей проверки по состоянию). — а failure preventive primary maintenance (overhaul control) process which requires that the item be periodically inspected, checked or tested against some appropriate physical standards (wear or deterioration limits) to determine whether the item can continue its service (for another ос check interval).
- по техническому состоянию — оn-condition check
- по форме "а" ("в", "с"), регламентная (периодиче — scheduled (periodic) "а" ("в", "с") check
- правильности ввода данных — data entry /insertion/ verification
-, предварительная — preliminary check
-, предвзлетная (по контрольной карте) — pre-takeoff check, before-takeoff check
-, предполетная — pre-flight check
-, предпосадочная (по контрольной карте) — pre-landing check, beforelanding check
-, предстартовая — prestart procedure
- приемистости (двигателя) — acceleration test
- прилегания поверхностей на краску (берлинскую лазурь) — check of the surfaces for close contacting indicated by continuity of (prussian blue) marking transferred
-, принудительная (вводимая вручную) — manually initiated /induced/ test /check/
- противообледенительной системы (надпись) — anti-ice test
- противопожарной системы (надпись) — firex test
- работоспособности — operational test
- работы — operational test
- радиального биения (рабочего колеса турбины (на оправке) — check of eccentricity /concentricity/ of turbine wheel (on mandrel)
-, регламентная — scheduled maintenance check
проверки самолета, его систем и агрегатов в указанные сроки. — those manufacturer recommended check and inspections of the aircraft, its systems and units dictated by the time limits.
- самолетов парка, выборочная — sampling inspection of fleet
"- сигнальных ламп" (надпись) — lamp test
- системы — system test (sys tst)
- системы сигнализации пожаpa — fire warning) test
"- системы сигн. пож. в otc. дв. (надпись) — eng compt fire warn test
-, совместная (проводимая поставщиком и покупателем) — conjoint check, check or test conjointly conducted (by supplier and buyer)
- соконусности несущего винта (вертолета) — rotor blade tracking test
- сопротивления изоляции — insulation-resistance test
test for measuring ohmic resistance of insulation.
- с помощью встроенного контроля — built-in test
- с (к-л.) пульта (или наборного поля) — test /check/ via /from/ сапtrol panel (or keyboard)
-, стартовая — on line test
-, стендовая — bench test
-, стендовая (испытание) — bench check/test/
- технического состояния — operational status check, check for condition
-, транзитная — transit check
план транзитного полета включает транзитную проверку. — the transit time schedule includes transit check.
-, тщательная — thorough check
-, функциональная — functional test
- электрической прочности (изоляции) — (insulation) voltage-withstand test
проверка способности изоляции выдерживать (повышеннoe против нормы) напряжение. — application of voltage (higher than rated) for determining the adequancy of insulation materials against breakdown.
- элементов конструкции (ла), выборочная — structural sampling test
- эффективности системы охлаждения (двигателя и редуктора вертолета) при взлете (висении, наборе высоты, снижении) — takeoff (hovering, climb, descent) cooling test
'включение проверки' (надпись) — test on
причина п. — reason for check /test/
производить п. по 3, пп. a,6 — test the unit according to requirements of para. 3 (a, b)Русско-английский сборник авиационно-технических терминов > проверка
-
13 SCADA
SCADA
SCADA-система
диспетчерское управление и сбор данных
ПО, предназначенное для поддержки средств автоматизации и построения систем промышленной автоматизации.
[ http://www.morepc.ru/dict/]SCADA (аббр. от англ. supervisory control and data acquisition, диспетчерское управление и сбор данных) — программный пакет, предназначенный для разработки или обеспечения работы в реальном времени систем сбора, обработки, отображения и архивирования информации об объекте мониторинга или управления. SCADA может являться частью АСУ ТП, АСКУЭ, системы экологического мониторинга, научного эксперимента, автоматизации здания и т. д. SCADA-системы используются во всех отраслях хозяйства, где требуется обеспечивать операторский контроль за технологическими процессами в реальном времени. Данное программное обеспечение устанавливается на компьютеры и, для связи с объектом, использует драйверы ввода-вывода или OPC/DDE серверы. Программный код может быть как написан на языке программирования (например на C++), так и сгенерирован в среде проектирования.
Иногда SCADA-системы комплектуются дополнительным ПО для программирования промышленных контроллеров. Такие SCADA-системы называются интегрированными и к ним добавляют термин SoftLogic.
Термин «SCADA» имеет двоякое толкование. Наиболее широко распространено понимание SCADA как приложения[2], то есть программного комплекса, обеспечивающего выполнение указанных функций, а также инструментальных средств для разработки этого программного обеспечения. Однако, часто под SCADA-системой подразумевают программно-аппаратный комплекс. Подобное понимание термина SCADA более характерно для раздела телеметрия.
Значение термина SCADA претерпело изменения вместе с развитием технологий автоматизации и управления технологическими процессами. В 80-е годы под SCADA-системами чаще понимали программно-аппаратные комплексы сбора данных реального времени. С 90-х годов термин SCADA больше используется для обозначения только программной части человеко-машинного интерфейса АСУ ТП.Основные задачи, решаемые SCADA-системами
SCADA-системы решают следующие задачи:- Обмен данными с «устройствами связи с объектом», то есть с промышленными контроллерами и платами ввода/вывода) в реальном времени через драйверы.
- Обработка информации в реальном времени.
- Логическое управление.
- Отображение информации на экране монитора в удобной и понятной для человека форме.
- Ведение базы данных реального времени с технологической информацией.
- Аварийная сигнализация и управление тревожными сообщениями.
- Подготовка и генерирование отчетов о ходе технологического процесса.
- Осуществление сетевого взаимодействия между SCADA ПК.
- Обеспечение связи с внешними приложениями (СУБД, электронные таблицы, текстовые процессоры и т. д.). В системе управления предприятием такими приложениями чаще всего являются приложения, относимые к уровню MES.
SCADA-системы позволяют разрабатывать АСУ ТП в клиент-серверной или в распределённой архитектуре.
Основные компоненты SCADA
SCADA—система обычно содержит следующие подсистемы:- Драйверы или серверы ввода-вывода — программы, обеспечивающие связь SCADA с промышленными контроллерами, счётчиками, АЦП и другими устройствами ввода-вывода информации.
- Система реального времени — программа, обеспечивающая обработку данных в пределах заданного временного цикла с учетом приоритетов.
- Человеко-машинный интерфейс (HMI, англ. Human Machine Interface) — инструмент, который представляет данные о ходе процесса человеку оператору, что позволяет оператору контролировать процесс и управлять им. Программа-редактор для разработки человеко-машинного интерфейса.
- Система логического управления — программа, обеспечивающая исполнение пользовательских программ (скриптов) логического управления в SCADA-системе. Набор редакторов для их разработки.
- База данных реального времени — программа, обеспечивающая сохранение истории процесса в режиме реального времени.
- Система управления тревогами — программа, обеспечивающая автоматический контроль технологических событий, отнесение их к категории нормальных, предупреждающих или аварийных, а также обработку событий оператором или компьютером.
- Генератор отчетов — программа, обеспечивающая создание пользовательских отчетов о технологических событиях. Набор редакторов для их разработки.
- Внешние интерфейсы — стандартные интерфейсы обмена данными между SCADA и другими приложениями. Обычно OPC, DDE, ODBC, DLL и т. д.
Концепции систем
Термин SCADA обычно относится к централизованным системам контроля и управления всей системой, или комплексами систем, осуществляемого с участием человека. Большинство управляющих воздействий выполняется автоматически RTU или ПЛК. Непосредственное управление процессом обычно обеспечивается RTU или PLC, а SCADA управляет режимами работы. Например, PLC может управлять потоком охлаждающей воды внутри части производственного процесса, а SCADA система может позволить операторам изменять уста для потока, менять маршруты движения жидкости, заполнять те или иные ёмкости, а также следить за тревожными сообщениями (алармами), такими как — потеря потока и высокая температура, которые должны быть отображены, записаны, и на которые оператор должен своевременно реагировать. Цикл управления с обратной связью проходит через RTU или ПЛК, в то время как SCADA система контролирует полное выполнение цикла.
Сбор данных начинается в RTU или на уровне PLC и включает — показания измерительного прибора. Далее данные собираются и форматируются таким способом, чтобы оператор диспетчерской, используя HMI мог принять контролирующие решения — корректировать или прервать стандартное управление средствами RTU/ПЛК. Данные могут также быть записаны в архив для построения трендов и другой аналитической обработки накопленных данных.[ http://ru.wikipedia.org/wiki/SCADA]
CitectSCADA
полнофункциональная система мониторинга, управления и сбора данных (SCADA – Supervisory Control And Data Acquisition)
ТЕХНИЧЕСКАЯ ИНФОРМАЦИЯ:CitectSCADA построена на базе мультизадачного ядра реального времени, что обеспечивает производительность сбора до 5 000 значений в секунду при работе в сетевом режиме с несколькими станциями. Модульная клиент-серверная архитектура позволяет одинаково эффективно применять CitectSCADA как в малых проектах, с использованием только одного АРМ, так и в больших, с распределением задач на несколько компьютеров.
В отличие от других SCADA-систем среда разработки CitectSCADA поставляется бесплатно. Оплачивается только среда исполнения (runtime). Это позволяет пользователю разработать и протестировать пробный проект, не вкладывая средств на начальном этапе.
Схема лицензирования CitectSCADA основана на учете числа одновременно задействованных компьютеров в проекте, а не общего числа компьютеров, на которых установлена CitectSCADA.
CitectSCADA лицензируется на заданное количество точек (дискретных или аналоговых переменных). При этом учитываются только внешние переменные, считываемые из устройств ввода/вывода, а внутренние переменные, находящиеся в памяти или на диске, бесплатны и не входят в количество лицензируемых точек. Градация количества лицензируемых точек в CitectSCADA более равномерна, чем в других системах: 75, 150, 500, 1 500, 5 000, 15 000, 50 000 и неограниченное количество.
В CitectSCADA резервирование является встроенным и легко конфигурируемым. Резервирование позволяет защищать все зоны потенциальных отказов как функциональных модулей (серверов и клиентов), так и сетевых соединений между узлами и устройствами ввода/вывода.
CitectSCADA имеет встроенный язык программирования CiCode, а также поддержку VBA.
CitectSCADA работает как 32-разрядное приложение Windows 9X/NT/2000/XP/2003. Сбор данных, формирование алармов и построение трендов происходит одновременно с редактированием и компиляцией.
[ http://www.rtsoft.ru/catalog/soft/scada/detail/343/]
Словесный портрет современной управляющей системы типа SCADA
-
Масштабируемая
- Наращивание системы без её переконфигурирования
- Масштабы проекта не ограничены
- До 255 одновременно подключённых клиентов
- Поддержка локальных и глобальных сетей
- Возможность интеграции с веб-приложениями без конфигурирования системы
- Возможность функционирования при малой пропускной способности коммуникаций
- Поддержка кластерных конфигураций
- Возможность перезапуска отдельных процессов, относящихся к разным компонентам
-
Гибкая
- Полноценная архитектура «клиент-сервер»
- Возможность масштабирования серверов/серверных массивов алармов, трендов и отчётов
- Поддержка централизованного хранения файлов проекта для удобства обслуживания, а также распределённого хранения и комбинированного варианта
- Внесение изменений на отдельных локациях
- Возможность функционирования при малой пропускной способности коммуникаций
- Поддержка устоявшихся и новых стандартов
-
Надёжная
- Встроенная поддержка режима ожидания
- Резервирование файловых серверов
- Резервирование сетевых коммуникаций
- Резервирование серверов алармов
- Резервирование серверов трендов
- Резервирование серверов отчётов
- Многоуровневое резервирование ввода-вывода
- Автоматическая замена серверов
- Автоматическая синхронизация историй трендов
- Автоматическая синхронизация таблиц алармов
- Автоматическая синхронизация времени
- Защитные функции
- Автоматический перезапуск в случае сбоя системы
- Высокопроизводительная
- Безопасная
-
Коммуникационные технологии
- Поддержка открытых коммуникационных стандартов
- Поддержка каждым сервером ввода-вывода многих протоколов
- Драйверы протоколов RS-232, RS-422, RS-485, TCP/IP
- Время установки драйверов в пределах 60 секунд
- До 255 одновременно подключённых клиентов
- До 4096 устройств ввода-вывода на одну систему
- Поддержка внешнего подключения для удалённых устройств
- Средства разработки драйверов для специализированных протоколов
- Поддержка стандарта OPC Server DA2.0
- Интегрированный веб-сервис XML
- Доступ
- Неограниченное число меток
- Длина имени метки до 80 символов
- Поддержка меток качества и времени для соответствующих драйверов
- Единая база данных для контроллеров ПЛК и системы SCADA
- Двунаправленная синхронизация со средой разработки для ПЛК
- Статическая синхронизация для разработки в автономном режиме
- - Автоматические импорт и синхронизация
- Импорт из ПЛК разных типов
- Добавление пользовательских схем импорта
-
Разработка
- Неограниченное число экранов
- 24-битные цвета
- Быстрый выбор цветов по названиям
- Поддержка прозрачных цветов
- Продвинутая анимация без дополнительного программирования
- Анимация символов на базе тегов
- До 32000 анимированных изображений на страницу
- Неограниченное число мигающих цветов
- Мультиязычность
- Инструменты типа 3D Pipe
- Трёхмерные эффекты (поднятие, опускание, выдавливание)
-
Импорт графики
- Растровые изображения Windows (BMP, RLE, DIB)
- Формат AutoCAD (DXF)
- Формат Encapsulated Postscript (EPS)
- Формат Fax Image (FAX)
- Формат Ventura (IMG)
- Формат JPEG (JPG, JIF, JFF, JFE)
- Формат Photo CD (PCD)
- Формат PaintBrush (PCX)
- Формат Portable Network Graphics (PNG)
- Формат Targa (TGA)
- Формат Tagged Image Format (TIFF)
- Формат Windows Meta File (WMF)
- Формат Word Perfect Graphics (WPG)
- Неограниченное число отмен действий
- Кнопки в стиле Windows XP со свойствами динамического перемещения
- Шаблоны
- Символы
- Более 800 символов в комплекте поставки
-
Объектное конфигурирование
- Неограниченное число объектов типа «джинн» (Genie) и «суперджинн» (Super Genie)
- Пользовательские «джинны» позволяют отображать на экране пользовательское оборудование
- Пользовательские «суперджины» позволяют работать с разными устройствами через один интерфейс
- Объекты типа «джинн» и «суперджинн» способны воспринимать изменения в тегах устройств без дополнительного программирования
-
Работа
- Разрешения до 4096 x 4096
- Изменение размеров изображений (изотропное и анизотропное)
- Поддержка вывода на несколько мониторов
- Настройка скорости обновления страниц (минимум 10 мс)
- Информирование о потере связи
- Переключение языков в ходе работы
- Поддержка одно- и двухбайтовых наборов символов
-
Безопасность
- Уровень безопасности влияет на:
- Видимость объектов
- Доступ к графическим дисплеям
- Подтверждение алармов
- Создание отчётов
- Системные утилиты
-
Управление
- Сенсорные команды
- Мышь
- -Клавиатурное управление системой, страницами и анимацией
- Вертикальные и горизонтальные ползунки
- Замена БД
-
Анализ процессов
- Объединение алармов с трендами
- 32 и более перьев
- 4 и более оконных секций
- 2 и более курсоров
- Наложение перьев
- Информация о качестве данных
- Аналоговые и цифровые перья
- Информация о подтверждении алармов
- Описание алармов (аналоговых и мультицифровых)
- Комментарии к алармам
- Поддержка перехода на летнее и зимнее время
- Сохранение просмотров в процессе работы
- Хранение просмотров в удалённых локациях
- Отображение различных временных периодов на том же дисплее
- Настраиваемое и расширяемое управление
-
Алармы
- Неограниченное число алармов
- Централизованная обработка алармов
- Алармы могут быть следующих типов:
- Цифровые
- Аналоговые
- Временные метки
- Высокоуровневые выражения
- Мультицифровые
- Цифровые с временными метками
- Аналоговые с временными метками
- Изменение языка для всех алармов в процессе работы
- Подтверждение приёма в сети без дополнительного конфигурирования
- Отключение сети без дополнительного конфигурирования
- Категории, зоны и приоритеты алармов
- Задержки алармов
- Назначение временных меток с разрешением в 1 мс
- Различные данные в алармах
- Индивидуальные и групповые подтверждения
- Подтверждения на основе категорий и приоритетов
- Подтверждения отображаются графически, в списке алармов или через специализированный код:
- Сортировка алармов
- Фильтрация алармов
- Пользовательские поля алармов
-
Тренды
- Неограниченное число трендов
- До 16000 трендов на страницу
- Отображение любого тренда из истории менее чем за 1 секунду
- Файлов трендов регулируемых размеров
- Просмотр архивных трендов параллельно с актуальными в процессе работы системы
- Выбор с разрешением 1 мс
- Сравнение трендов
- Быстрый выбор трендов по тегам
- Сохранение по событию или периодическое сохранение
Статистический контроль ( SPC)
- Таблицы индексов Cp и CpK
- Контрольные карты X, R и S
- Диаграммы Парето
- Настраиваемые размеры и границы подгрупп
- Типы алармов: Above UCL, Below LCL, Outside CL, Down Trend, Up Trend, Erratic, Gradual, Down, Gradual Up, Mixture, Outside WL, Freak, Stratification и высокоуровневые выражения
- Редактор сгенерированных отчётов, редактирование по модели WYSIWYN, отчёты в формате Rich Text
- Запуск внешними событиями, по расписанию, через высокоуровневые выражения и по команде оператора
- Вывод на принтер, в файл, по электронной почте, на экран, в формат HTML
- Разработка проекта
- Масштабы проекта не ограничены
- Возможность разбиения на несколько проектов
- Удобная стандартизация проектов
- Удобное обслуживание проектов
- Встроенное средство настройки компьютеров позволяет конфигурировать каждый подключённый к сети ПК по отдельности
- Истинная вытесняющая многозадачность
- До 512 параллельных потоков
- Доступно более 600 функций SCADA
- Библиотеки для пользовательских функций
- До 2700 пользовательских функций
- Локальные, модульные и глобальные переменные
- Дополнительное программное обеспечение для создания собственных функций не требуется
- Прямой доступ к данным трендов, отчётов и алармов
- Подсвечивание синтаксиса
- Система онлайн-подсказок
- Всплывающие подсказки
- При редактировании доступны:
- Контрольные точки
- Просмотр переменных
- Мониторинг нитей
- Выделение кода цветом
- Окно контрольных точек
- Пошаговый режим выполнения
- Выделение текущей строки
- Удалённая отладка
- Автоматическая отладка в случае ошибок
- Сервер и клиент OPC
- Интерфейс ODBC
- Интерфейс OLE-DB
- Интерфейс CTAPI
- Интерфейс DLL
- Интерфейс MAPI (MAIL)
- Протоколы TCP/IP
- Последовательный интерфейс
[ http://www.rtsoft-training.ru/?p=600074]
Тематики
Синонимы
- SCADA-система
- диспетчерское управление и сбор данных
- система диспетчерского управления и сбора данных
- система мониторинга, управления и сбора данных
EN
Русско-английский словарь нормативно-технической терминологии > SCADA
-
14 программируемый логический контроллер
- speicherprogrammierbare Steuerung, f
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего. Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы. Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7. Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series. Рис. 4. Резервированный контроллер FCP270.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA). Рис. 5. Контроллер AC800M.
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-немецкий словарь нормативно-технической терминологии > программируемый логический контроллер
15 программируемый логический контроллер
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-английский словарь нормативно-технической терминологии > программируемый логический контроллер
16 программируемый логический контроллер
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-французский словарь нормативно-технической терминологии > программируемый логический контроллер
17 человеко-машинный интерфейс
- operator-machine communication
- MMI
- man-machine interface
- man-machine communication
- human-machine interface
- human-computer interface
- human interface device
- human interface
- HMI
- computer human interface
- CHI
человеко-машинный интерфейс (ЧМИ)
Технические средства, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование.
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства, дисплеи.
[ ГОСТ Р МЭК 60447-2000]
человекомашинный интерфейс (ЧМИ)
Технические средства контроля и управления, являющиеся частью оборудования, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование (ГОСТ Р МЭК 60447).
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства и дисплеи.
[ ГОСТ Р МЭК 60073-2000]
человеко-машинный интерфейс
Средства обеспечения двусторонней связи "оператор - технологическое оборудование" (АСУ ТП). Название класса средств, в который входят подклассы:
SCADA (Supervisory Control and Data Acquisition) - Операторское управление и сбор данных от технологического оборудования.
DCS (Distributed Control Systems) - Распределенная система управления технологическим оборудованием.
[ http://www.morepc.ru/dict/]Параллельные тексты EN-RU
MotorSys™ iPMCC solutions can integrate a dedicated human-machine interface (HMI) or communicate via a personal computer directly on the motor starters.
[Schneider Electric]Интеллектуальный центр распределения электроэнергии и управления электродвигателями MotorSys™ может иметь в своем составе специальный человеко-машинный интерфейс (ЧМИ). В качестве альтернативы используется обмен данным между персональным компьютером и пускателями.
[Перевод Интент]
HMI на базе операторских станций
Самое, пожалуй, главное в системе управления - это организация взаимодействия между человеком и программно-аппаратным комплексом. Обеспечение такого взаимодействия и есть задача человеко-машинного интерфейса (HMI, human machine interface).
На мой взгляд, в аббревиатуре “АСУ ТП” ключевым является слово “автоматизированная”, что подразумевает непосредственное участие человека в процессе реализации системой определенных задач. Очевидно, что чем лучше организован HMI, тем эффективнее человек сможет решать поставленные задачи.
Как же организован HMI в современных АСУ ТП?
Существует, как минимум, два подхода реализации функционала HMI:- На базе специализированных рабочих станций оператора, устанавливаемых в центральной диспетчерской;
- На базе панелей локального управления, устанавливаемых непосредственно в цеху по близости с контролируемым технологическим объектам.
Иногда эти два варианта комбинируют, чтобы достичь наибольшей гибкости управления. В данной статье речь пойдет о первом варианте организации операторского уровня.
Аппаратно рабочая станция оператора (OS, operator station) представляет собой ни что иное как персональный компьютер. Как правило, станция снабжается несколькими широкоэкранными мониторами, функциональной клавиатурой и необходимыми сетевыми адаптерами для подключения к сетям верхнего уровня (например, на базе Industrial Ethernet). Станция оператора несколько отличается от привычных для нас офисных компьютеров, прежде всего, своим исполнением и эксплуатационными характеристиками (а также ценой 4000 - 10 000 долларов).
На рисунке 1 изображена рабочая станция оператора системы SIMATIC PCS7 производства Siemens, обладающая следующими техническими характеристиками:
Процессор: Intel Pentium 4, 3.4 ГГц;
Память: DDR2 SDRAM до 4 ГБ;
Материнская плата: ChipSet Intel 945G;
Жесткий диск: SATA-RAID 1/2 x 120 ГБ;
Слоты: 4 x PCI, 2 x PCI E x 1, 1 x PCI E x 16;
Степень защиты: IP 31;
Температура при эксплуатации: 5 – 45 C;
Влажность: 5 – 95 % (без образования конденсата);
Операционная система: Windows XP Professional/2003 Server.
Рис. 1. Пример промышленной рабочей станции оператора.Системный блок может быть как настольного исполнения ( desktop), так и для монтажа в 19” стойку ( rack-mounted). Чаще применяется второй вариант: системный блок монтируется в запираемую стойку для лучшей защищенности и предотвращения несанкционированного доступа.
Какое программное обеспечение используется?
На станции оператора устанавливается программный пакет визуализации технологического процесса (часто называемый SCADA). Большинство пакетов визуализации работают под управлением операционных систем семейства Windows (Windows NT 4.0, Windows 2000/XP, Windows 2003 Server), что, на мой взгляд, является большим минусом.
Программное обеспечение визуализации призвано выполнять следующие задачи:- Отображение технологической информации в удобной для человека графической форме (как правило, в виде интерактивных мнемосхем) – Process Visualization;
- Отображение аварийных сигнализаций технологического процесса – Alarm Visualization;
- Архивирование технологических данных (сбор истории процесса) – Historical Archiving;
- Предоставление оператору возможности манипулировать (управлять) объектами управления – Operator Control.
- Контроль доступа и протоколирование действий оператора – Access Control and Operator’s Actions Archiving.
- Автоматизированное составление отчетов за произвольный интервал времени (посменные отчеты, еженедельные, ежемесячные и т.д.) – Automated Reporting.
Как правило, SCADA состоит из двух частей:
- Среды разработки, где инженер рисует и программирует технологические мнемосхемы;
- Среды исполнения, необходимой для выполнения сконфигурированных мнемосхем в режиме runtime. Фактически это режим повседневной эксплуатации.
Существует две схемы подключения операторских станций к системе управления, а точнее уровню управления. В рамках первой схемы каждая операторская станция подключается к контроллерам уровня управления напрямую или с помощью промежуточного коммутатора (см. рисунок 2). Подключенная таким образом операторская станция работает независимо от других станций сети, и поэтому часто называется одиночной (пусть Вас не смущает такое название, на самом деле таких станций в сети может быть несколько).

Рис. 2. Схема подключения одиночных операторских станций к уровню управления.Есть и другой вариант. Часто операторские станции подключают к серверу или резервированной паре серверов, а серверы в свою очередь подключаются к промышленным контроллерам. Таким образом, сервер, являясь неким буфером, постоянно считывает данные с контроллера и предоставляет их по запросу рабочим станциям. Станции, подключенные по такой схеме, часто называют клиентами (см. рисунок 3).
Как происходит информационный обмен?
Рис. 3. Клиент-серверная архитектура операторского уровня.
Для сопряжения операторской станции с промышленным контроллером на первой устанавливается специальное ПО, называемое драйвером ввода/вывода. Драйвер ввода/вывода поддерживает совместимый с контроллером коммуникационный протокол и позволяет прикладным программам считывать с контроллера параметры или наоборот записывать в него. Пакет визуализации обращается к драйверу ввода/вывода каждый раз, когда требуется обновление отображаемой информации или запись измененных оператором данных. Для взаимодействия пакета визуализации и драйвера ввода/вывода используется несколько протоколов, наиболее популярные из которых OPC (OLE for Process Control) и NetDDE (Network Dynamic Data Exchange). Обобщенно можно сказать, что OPC и NetDDE – это протоколы информационного обмена между различными приложениями, которые могут выполняться как на одном, так и на разных компьютерах. На рисунках 4 и 5 изображено, как взаимодействуют программные компоненты при различных схемах построения операторского уровня.
Рис. 4. Схема взаимодействия программных модулей при использовании одиночных станций.
Рис. 5. Схема взаимодействия программных модулей при использовании клиент-серверной архитектуры.
Как выглядит SCADA?
Разберем простой пример. На рисунке 6 приведена абстрактная схема технологического процесса, хотя полноценным процессом это назвать трудно. Рис. 6. Пример операторской мнемосхемы.
Рис. 6. Пример операторской мнемосхемы.
На рисунке 6 изображен очень упрощенный вариант операторской мнемосхемы для управления тех. процессом. Как видно, резервуар (емкость) наполняется водой. Задача системы - нагреть эту воду до определенной температуры. Для нагрева воды используется газовая горелка. Интенсивность горения регулируется клапаном подачи газа. Также должен быть насос для закачки воды в резервуар и клапан для спуска воды.
На мнемосхеме отображаются основные технологические параметры, такие как: температура воды; уровень воды в резервуаре; работа насосов; состояние клапанов и т.д. Эти данные обновляются на экране с заданной частотой. Если какой-либо параметр достигает аварийного значения, соответствующее поле начинает мигать, привлекая внимание оператора.
Сигналы ввода/вывода и исполнительные механизмы отображаются на мнемосхемах в виде интерактивных графических символов (иконок). Каждому типу сигналов и исполнительных механизмов присваивается свой символ: для дискретного сигнала это может быть переключатель, кнопка или лампочка; для аналогового – ползунок, диаграмма или текстовое поле; для двигателей и насосов – более сложные фейсплейты ( faceplates). Каждый символ, как правило, представляет собой отдельный ActiveX компонент. Вообще технология ActiveX широко используется в SCADA-пакетах, так как позволяет разработчику подгружать дополнительные символы, не входящие в стандартную библиотеку, а также разрабатывать свои собственные графические элементы, используя высокоуровневые языки программирования.
Допустим, оператор хочет включить насос. Для этого он щелкает по его иконке и вызывает панель управления ( faceplate). На этой панели он может выполнить определенные манипуляции: включить или выключить насос, подтвердить аварийную сигнализацию, перевести его в режим “техобслуживания” и т.д. (см. рисунок 7). Рис. 7. Пример фейсплейта для управления насосом.Оператор также может посмотреть график изменения интересующего его технологического параметра, например, за прошедшую неделю. Для этого ему надо вызвать тренд ( trend) и выбрать соответствующий параметр для отображения. Пример тренда реального времени показан на рисунке 8.
Рис. 7. Пример фейсплейта для управления насосом.Оператор также может посмотреть график изменения интересующего его технологического параметра, например, за прошедшую неделю. Для этого ему надо вызвать тренд ( trend) и выбрать соответствующий параметр для отображения. Пример тренда реального времени показан на рисунке 8.
 Рис. 8. Пример отображения двух параметров на тренде реального времени.
Рис. 8. Пример отображения двух параметров на тренде реального времени.
Для более детального обзора сообщений и аварийных сигнализаций оператор может воспользоваться специальной панелью ( alarm panel), пример которой изображен на рисунке 9. Это отсортированный список сигнализаций (alarms), представленный в удобной для восприятия форме. Оператор может подтвердить ту или иную аварийную сигнализацию, применить фильтр или просто ее скрыть. Рис. 9. Панель сообщений и аварийных сигнализаций.
Рис. 9. Панель сообщений и аварийных сигнализаций.
Говоря о SCADA, инженеры часто оперируют таким важным понятием как “тэг” ( tag). Тэг является по существу некой переменной программы визуализации и может быть использован как для локального хранения данных внутри программы, так и в качестве ссылки на внешний параметр процесса. Тэги могут быть разных типов, начиная от обычных числовых данных и кончая структурой с множеством полей. Например, один визуализируемый параметр ввода/вывода – это тэг, или функциональный блок PID-регулятора, выполняемый внутри контроллера, - это тоже тэг. Ниже представлена сильно упрощенная структура тэга, соответствующего простому PID-регулятору:
Tag Name = “MyPID”;
Tag Type = PID;
Fields (список параметров):
MyPID.OP
MyPID.SP
MyPID.PV
MyPID.PR
MyPID.TI
MyPID.DI
MyPID.Mode
MyPID.RemoteSP
MyPID.Alarms и т.д.
В комплексной прикладной программе может быть несколько тысяч тэгов. Производители SCADA-пакетов это знают и поэтому применяют политику лицензирования на основе количества используемых тэгов. Каждая купленная лицензия жестко ограничивает суммарное количество тэгов, которые можно использовать в программе. Очевидно, чем больше тегов поддерживает лицензия, тем дороже она стоит; так, например, лицензия на 60 000 тэгов может обойтись в 5000 тыс. долларов или даже дороже. В дополнение к этому многие производители SCADA формируют весьма существенную разницу в цене между “голой” средой исполнения и полноценной средой разработки; естественно, последняя с таким же количеством тэгов будет стоить заметно дороже.
Сегодня на рынке представлено большое количество различных SCADA-пакетов, наиболее популярные из которых представлены ниже:
1. Wonderware Intouch;
2. Simatic WinCC;
3. Iconics Genesis32;
4. Citect;
5. Adastra Trace Mode
Лидирующие позиции занимают Wonderware Intouch (производства Invensys) и Simatic WinCC (разработки Siemens) с суммарным количеством инсталляций более 80 тыс. в мире. Пакет визуализации технологического процесса может поставляться как в составе комплексной системы управления, так и в виде отдельного программного продукта. В последнем случае SCADA комплектуется набором драйверов ввода/вывода для коммуникации с контроллерами различных производителей. [ http://kazanets.narod.ru/HMI_PART1.htm]Тематики
- автоматизация, основные понятия
- автоматизированные системы
Синонимы
EN
Русско-английский словарь нормативно-технической терминологии > человеко-машинный интерфейс
18 широковещательное объектно-ориентированное сообщение о событии на подстанции
GOOSE-сообщение
-
[Интент]
широковещательное объектно-ориентированное сообщение о событии на подстанции
Широковещательный высокоскоростной внеочередной отчет, содержащий статус каждого из входов, устройств пуска, элементов выхода и реле, реальных и виртуальных.
Примечание. Этот отчет выдается многократно последовательно, как правило, сразу после первого отчета с интервалами 2, 4, 8,…, 60000 мс. Значение задержки первого повторения является конфигурируемым. Такой отчет обеспечивает выдачу высокоскоростных сигналов отключения с высокой вероятностью доставки.
[ ГОСТ Р 54325-2011 (IEC/TS 61850-2:2003)]
общие объектно-ориентированные события на подстанции
-
[ ГОСТ Р МЭК 61850-7-2-2009]
GOOSE
Generic Object Oriented Substation Event (стандарт МЭК 61850-8-1)
Протокол передачи данных о событиях на подстанции.
Один из трех протоколов передачи данных, предлагаемых к использованию в МЭК 61850.
Фактически данный протокол служит для замены медных кабельных связей, предназначенных для передачи дискретных сигналов между устройствами.
[ Цифровые подстанции. Проблемы внедрения устройств РЗА]EN
generic object oriented substation event
on the occurrence of any change of state, an IED will multicast a high speed, binary object, Generic Object Oriented Substation Event (GOOSE) report by exception, typically containing the double command state of each of its status inputs, starters, output elements and relays, actual and virtual.
This report is re-issued sequentially, typically after the first report, again at intervals of 2, 4, 8…60000 ms. (The first repetition delay value is an open value it may be either shorter or longer).
A GOOSE report enables high speed trip signals to be issued with a high probability of delivery
[IEC 61850-2, ed. 1.0 (2003-08)]До недавнего времени для передачи дискретных сигналов между терминалами релейной защиты и автоматики (РЗА) использовались дискретные входы и выходные реле. Передача сигнала при этом осуществляется подачей оперативного напряжения посредством замыкания выходного реле одного терминала на дискретный вход другого терминала (далее такой способ передачи будем называть традиционным).
Такой способ передачи информации имеет следующие недостатки:- необходимо большое количество контрольных кабелей, проложенных между шкафами РЗА,
- терминалы РЗА должны иметь большое количество дискретных входов и выходных реле,
- количество передаваемых сигналов ограничивается определенным количеством дискретных входов и выходных реле,
- отсутствие контроля связи между терминалами РЗА,
- возможность ложного срабатывания дискретного входа при замыкании на землю в цепи передачи сигнала.
Информационные технологии уже давно предоставляли возможность для передачи информации между микропроцессорными терминалами по цифровой сети. Разработанный недавно стандарт МЭК 61850 предоставил такую возможность для передачи сигналов между терминалами РЗА.
Стандарт МЭК 61850 использует для передачи данных сеть Ethernet. Внутри стандарта МЭК 61850 предусмотрен такой механизм, как GOOSE-сообщения, которые и используются для передачи сообщений между терминалами РЗА.
Принцип передачи GOOSE-сообщений показан на рис. 1.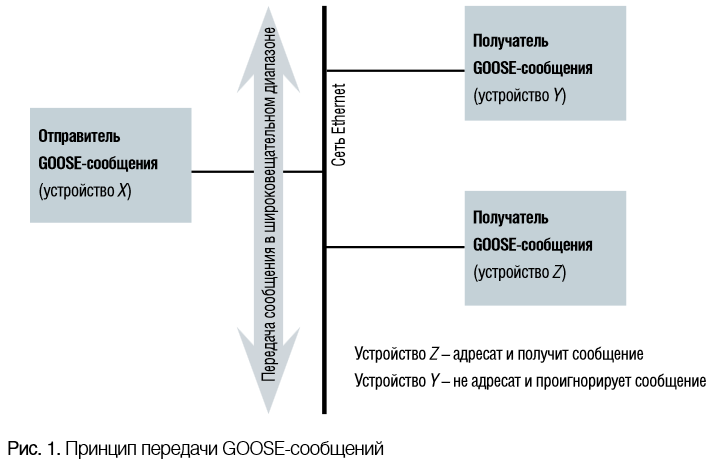
Устройство-отправитель передает по сети Ethernet информацию в широковещательном диапазоне.
В сообщении присутствует адрес отправителя и адреса, по которым осуществляется его передача, а также значение сигнала (например «0» или «1»).
Устройство-получатель получит сообщение, а все остальные устройства его проигнорируют.
Поскольку передача GOOSE-сообщений осуществляется в широковещательном диапазоне, т.е. нескольким адресатам, подтверждение факта получения адресатами сообщения отсутствует. По этой причине передача GOOSE-сообщений в установившемся режиме производится с определенной периодичностью.
При наступлении нового события в системе (например, КЗ и, как следствие, пуска измерительных органов защиты) начинается спонтанная передача сообщения через увеличивающиеся интервалы времени (например, 1 мс, 2 мс, 4 мс и т.д.). Интервалы времени между передаваемыми сообщениями увеличиваются, пока не будет достигнуто предельное значение, определяемое пользователем (например, 50 мс). Далее, до момента наступления нового события в системе, передача будет осуществляется именно с таким периодом. Указанное проиллюстрировано на рис. 2.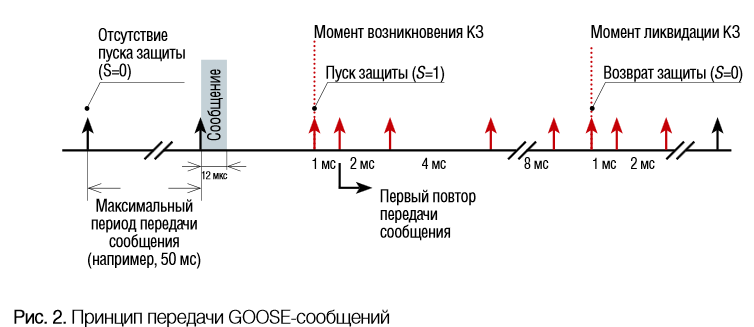
Технология повторной передачи не только гарантирует получение адресатом сообщения, но также обеспечивает контроль исправности линии связи и устройств – любые неисправности будут обнаружены по истечении максимального периода передачи GOOSE-сообщений (с точки зрения эксплуатации практически мгновенно). В случае передачи сигналов традиционным образом неисправность выявляется либо в процессе плановой проверки устройств, либо в случае неправильной работы системы РЗА.
Еще одной особенностью передачи GOOSE-сообщений является использование функций установки приоритетности передачи телеграмм (priority tagging) стандарта Ethernet IEEE 802.3u, которые не используются в других протоколах, в том числе уровня TCP/IP. То есть GOOSE-сообщения идут в обход «нормальных» телеграмм с более высоким приоритетом (см. рис. 3).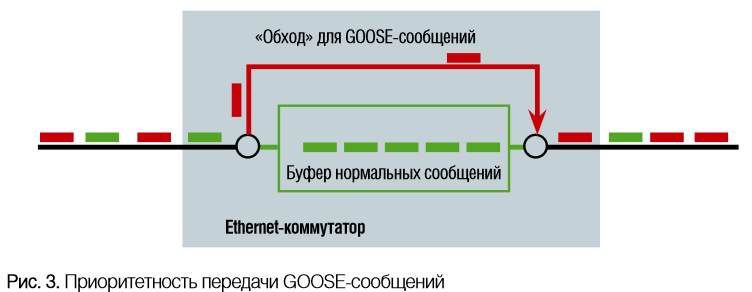
Однако стандарт МЭК 61850 декларирует передачу не только дискретной информации между терминалами РЗА, но и аналоговой. Это означает, что в будущем будет иметься возможность передачи аналоговой информации от ТТ и ТН по цифровым каналам связи. На данный момент готовых решений по передаче аналоговой информации для целей РЗА (в рамках стандарта МЭК 61850) ни один из производителей не предоставляет.
Для того чтобы использовать GOOSE-сообщения для передачи дискретных сигналов между терминалами РЗА необходима достаточная надежность и быстродействие передачи GOOSE-сообщений. Надежность передачи GOOSE-сообщений обеспечивается следующим:- Протокол МЭК 61850 использует Ethernet-сеть, за счет этого выход из строя верхнего уровня АСУ ТП и любого из устройств РЗА не отражается на передаче GOOSE-сообщений оставшихся в работе устройств,
- Терминалы РЗА имеют два независимых Ethernet-порта, при выходе одного из них из строя второй его полностью заменяет,
- Сетевые коммутаторы, к которым подключаются устройства РЗА, соединяются в два независимых «кольца»,
- Разные порты одного терминала РЗА подключаются к разным сетевым коммутаторам, подключенным к разным «кольцам»,
- Каждый сетевой коммутатор имеет дублированное питание от разных источников,
- Во всех устройствах РЗА осуществляется постоянный контроль возможности прохождения каждого сигнала. Это позволяет автоматически определить не только отказы цифровой связи, но и ошибки параметрирования терминалов.
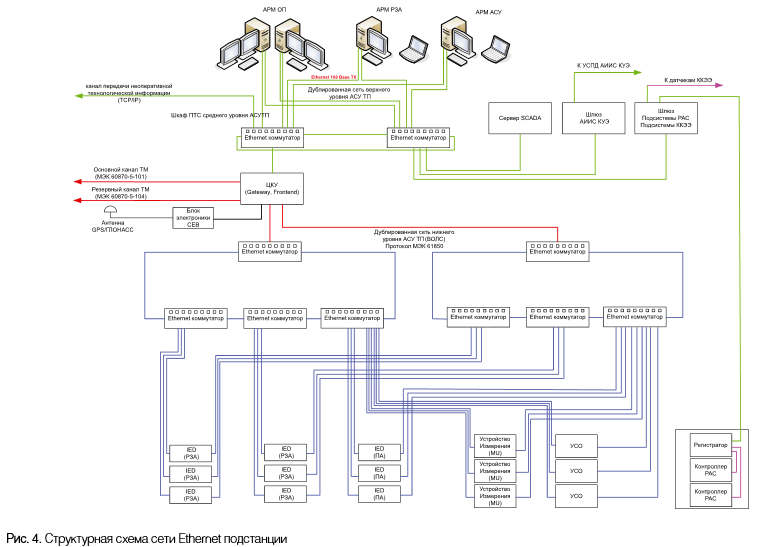
На рис. 4 изображен пример структурной схемы сети Ethernet (100 Мбит/c) подстанции. Отказ в передаче GOOSE-сообщения от одного устройства защиты другому возможен в результате совпадения как минимум двух событий. Например, одновременный отказ двух коммутаторов, к которым подключено одно устройство или одновременный отказ обоих портов одного устройства. Могут быть и более сложные отказы, связанные с одновременным наложением большего количества событий. Таким образом, единичные отказы оборудования не могут привести к отказу передачи GOOSEсообщений. Дополнительно увеличивает надежность то обстоятельство, что даже в случае отказа в передаче GOOSE-сообщения, устройство, принимающее сигнал, выдаст сигнал неисправности, и персонал примет необходимые меры для ее устранения.
Быстродействие.
В соответствии с требованиями стандарта МЭК 61850 передача GOOSE-сообщений должна осуществляться со временем не более 4 мс (для сообщений, требующих быстрой передачи, например, для передачи сигналов срабатывания защит, пусков АПВ и УРОВ и т.п.). Вообще говоря, время передачи зависит от топологии сети, количества устройств в ней, загрузки сети и загрузки вычислительных ресурсов терминалов РЗА, версии операционной системы терминала, коммуникационного модуля, типа центрального процессора терминала, количества коммутаторов и некоторых других аспектов. Поэтому время передачи GOOSE-сообщений должно быть подтверждено опытом эксплуатации.
Используя для передачи дискретных сигналов GOOSE-сообщения необходимо обращать внимание на то обстоятельство, что при использовании аппаратуры некоторых производителей, в случае отказа линии связи, значение передаваемого сигнала может оставаться таким, каким оно было получено в момент приема последнего сообщения.
Однако при отказе связи бывают случаи, когда сигнал должен принимать определенное значение. Например, значение сигнала блокировки МТЗ ввода 6–10 кВ в логике ЛЗШ при отказе связи целесообразно установить в значение «1», чтобы при КЗ на отходящем присоединении не произошло ложного отключения ввода. Так, к примеру, при проектировании терминалов фирмы Siemens изменить значение сигнала при отказе связи возможно с помощью свободно-программируемой CFCлогики (см. рис. 5).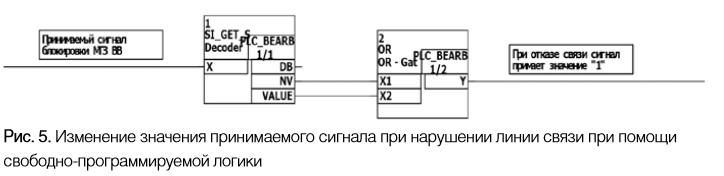
К CFC-блоку SI_GET_STATUS подводится принимаемый сигнал, на выходе блока мы можем получить значение сигнала «Value» и его статус «NV». Если в течение определенного времени не поступит сообщение со значением сигнала, статус сигнала «NV» примет значение «1». Далее статус сигнала и значение сигнала подводятся к элементу «ИЛИ», на выходе которого будет получено значение сигнала при исправности линии связи или «1» при нарушении исправности линии связи. Изменив логику, можно установить значение сигнала равным «0» при обрыве связи.
Использование GOOSE-сообщений предъявляет специальные требования к наладке и эксплуатации устройств РЗА. Во многом процесс наладки становится проще, однако при выводе устройства из работы необходимо следить не только за выводом традиционных цепей, но и не забывать отключать передачу GOOSE-сообщений.
При изменении параметрирования одного устройства РЗА необходимо производить загрузку файла параметров во все устройства, с которыми оно было связано.
В нашей стране имеется опыт внедрения и эксплуатации систем РЗА с передачей дискретных сигналов с использованием GOOSE-сообщений. На первых объектах GOOSE-сообщения использовались ограниченно (ПС 500 кВ «Алюминиевая»).
На ПС 500 кВ «Воронежская» GOOSEсообщения использовались для передачи сигналов пуска УРОВ, пуска АПВ, запрета АПВ, действия УРОВ на отключение смежного элемента, положения коммутационных аппаратов, наличия/отсутствия напряжения, сигналы ЛЗШ, АВР и т.п. Кроме того, на ОРУ 500 кВ и 110 кВ ПС «Воронежская» были установлены полевые терминалы, в которые собиралась информация с коммутационного оборудования и другая дискретная информация с ОРУ (рис. 6). Далее информация с помощью GOOSE-сообщений передавалась в терминалы РЗА, установленные в ОПУ подстанции (рис. 7, 8).
GOOSE-сообщения также были использованы при проектировании уже введенных в эксплуатацию ПС 500 кВ «Бескудниково», ПС 750 кВ «Белый Раст», ПС 330кВ «Княжегубская», ПС 220 кВ «Образцово», ПС 330 кВ «Ржевская». Эта технология применяется и при проектировании строящихся и модернизируемых подстанций ПС 500 кВ «Чагино», ПС 330кВ «Восточная», ПС 330 кВ «Южная», ПС 330 кВ «Центральная», ПС
330 кВ «Завод Ильич» и многих других.
Основные преимущества использования GOOSE-сообщений:- позволяет снизить количество кабелей вторичной коммутации на ПС;
- обеспечивает лучшую помехозащищенность канала связи;
- позволяет снизить время монтажных и пусконаладочных работ;
- исключает проблему излишнего срабатывания дискретных входов терминалов из-за замыканий на землю в цепях оперативного постоянного тока;
- убирает зависимость количества передаваемых сигналов от количества дискретных входов и выходных реле терминалов;
- обеспечивает возможность реконструкции и изменения связей между устройствами РЗА без прокладки дополнительных кабельных связей и повторного монтажа в шкафах;
- позволяет использовать МП терминалы РЗА с меньшим количеством входов и выходов (уменьшение габаритов и стоимости устройства);
- позволяет контролировать возможность прохождения сигнала (увеличивается надежность).
Безусловно, для окончательных выводов должен появиться достаточный опыт эксплуатации. В настоящее время большинство производителей устройств РЗА заявили о возможности использования GOOSEсообщений. Стандарт МЭК 61850 определяет передачу GOOSE-сообщений между терминалами разных производителей. Использование GOOSE-сообщений для передачи дискретных сигналов – это качественный скачок в развитии систем РЗА. С развитием стандарта МЭК 61850, переходом на Ethernet 1 Гбит/сек, с появлением новых цифровых ТТ и ТН, новых выключателей с возможностью подключения их блока управления к шине процесса МЭК 61850, эффективность использования GOOSE-сообщений намного увеличится. Облик будущих подстанций представляется с минимальным количеством контрольных кабелей, с передачей всех сообщений между устройствами РЗА, ТТ, ТН, коммутационными аппаратами через цифровую сеть. Устройства РЗА будут иметь минимальное количество выходных реле и дискретных входов
[ http://romvchvlcomm.pbworks.com/f/goosepaper1.pdf]
В стандарте определены два способа передачи данных напрямую между устройствами: GOOSE и GSSE. Это тоже пример наличия двух способов для реализации одной функции. GOOSE - более новый способ передачи сообщений, разработан специально для МЭК 61850. Способ передачи сообщений GSSE ранее присутствовал в стандарте UCA 2.0, являющимся одним из предшественников МЭК 61850. По сравнению с GSSE, GOOSE имеет более простой формат (Ethernet против стека OSI протоколов) и возможность передачи различных типов данных. Вероятно, способ GSSE включили в МЭК 61850 для того, чтобы производители, имеющие в своих устройствах протокол UCA 2.0, могли сразу декларировать соответствие МЭК 61850. В настоящее время все производители используют только GOOSE для передачи сообщений между устройствами.
Для выбора списка передаваемых данных в GOOSE, как и в отчѐтах, используются наборы данных. Однако тут требования уже другие. Время обработки GOOSE-сообщений должно быть минимальным, поэтому логично передавать наиболее простые типы данных. Обычно передаѐтся само значение сигнала и в некоторых случаях добавляется поле качества. Метка времени обычно включается в набор данных.
...
В устройствах серии БЭ2704 в передаваемых GOOSE-сообщениях содержатся данные типа boolean. Приниматься могут данные типа boolean, dbpos, integer.
Устоявшаяся тенденция существует только для передачи дискретной информации. Аналоговые данные пока передают немногие производители, и поэтому устоявшаяся тенденция в передаче аналоговой информации в данный момент отсутствует.
[ Источник]
Тематики
Синонимы
EN
Русско-английский словарь нормативно-технической терминологии > широковещательное объектно-ориентированное сообщение о событии на подстанции
19 протокол Modbus RTU
протокол Modbus RTU
-
[Интент]3.5.1. Протокол MODBUS
Протокол Modbus был предложен в 1979 году компанией Modicon. Он должен был служить протоколом реализации внутренних коммуникаций «точка-точка» между ПЛК Modicon и панелью программирования, предназначенной для ввода программ в этот ПЛК. Протокол Modbus построен по принципу открытой системы.
Область применения этого протокола не ограничивается только промышленной автоматизацией, Modbus применяется во многих других областях, включая системы автоматизации зданий.
Протокол Modbus предназначен для использования в сетевых структурах нескольких разновидностей, в том числе в разработанной компанией Modicon одноранговой сети Modbus Plus.
Modbus представляет собой протокол, построенный по принципу master-slave (ведущий-ведомый). Modbus допускает наличие в структуре только одного ведущего устройства и от 1 до 247 ведомых. В качестве ведомого устройства обычно выступает ПЛК. Роль ведущего устройства обычно играет либо панель программирования, либо главный компьютер.
Идеология протокола такова, что ведущему устройству адрес не присваивается, а ведомые пронумерованы от 1 до 247.
Адрес «0» зарезервирован в качестве адреса широковещательной передачи сообщений, предназначенных всем ведомым устройствам. Такое сообщение получают все ведомые устройства, но ответ на него не предусмотрен.
Сообщения-команды, исходящие от ведущего устройства, именуются запросами, а ответные сообщения, присылаемые ведомым устройством, ответами. Упрощенная структура формата сообщения, как запроса, так и ответа, показана ниже:
Адрес устройства Код функции Данные Контрольная сумма
Ведущее устройство не имеет адреса вообще, поэтому в поле адреса всегда указывается номер ведомого устройства. Если это запрос, то он направляется ведомому устройству с указанным адресом. Если сообщение является ответом, то оно поступает от ведомого устройства с проставленным в этом поле его адресом. Сообщение-запрос всегда содержит тот или иной код функции, например, код 03 – это функция «Чтение регистров хранения».
В последнем поле каждого сообщения помещается код ошибки, формируемый устройством-отправителем, так что устройство-получатель может проверить целостность пришедшего сообщения.
Протокол Modbus рассчитан на два режима последовательной передачи данных. Один именуется ASCII (American Standard Code for Information Interchange), а второй – режимом RTU (Remote Terminal Unit). Термин RTU ведет происхождение от SCADA-систем (Supervisor Control and Data Acquisition), в которых ведущее устройство, именуемое CTU (Central Terminal Unit), обменивается информацией с несколькими удаленными устройствами (RTU), находящимися от него на определенных расстояниях.
Для каждого режима определена структура кадров сообщений и их синхронизация. В процессе передачи по каналам последовательной связи оба режима предусматривают асинхронную передачу, при которой имеется заранее определенная структура кадра и символы пересылаются последовательно – по одному в каждый момент.
В табл. 3.11 и 3.12 показана отправка символа при использовании асинхронной последовательной передачи данных для обоих режимов с битом четности или без него.
Таблица 3.11. Структура кадра для 7-битового режима ASCII
Стартовый бит Бит четности Стоповый бит
Стартовый бит Стоповый бит Стоповый бит
Таблица 3.12. Структура кадра для 8-битового режима RTU
Стартовый бит Бит четности Стоповый бит
Стартовый бит Стоповый бит Стоповый бит
Каждый символ передается как последовательность битов, причем время, затрачиваемое на передачу одного бита, обратно пропорционально скорости передачи данных. Например, при скорости 9600 бод время передачи 1 бита равно 104,1 мкс. Когда информация не передается, линии связи находится в маркерном (marking) состоянии. Противоположное ему состояние именуется заполненным (spacing). Когда линия переходит в заполненное состояние для побитовой передачи данных, каждому символу предшествует стартовый бит, а в конце идет один стоповый бит или больше, после этого линия возвращается в маркерное состояние.
В промежутке между стартовым и стоповым битами осуществляется передача 7, в режиме ASCII, или 8, в режиме RTU, битов, составляющих символ, причем первым посылается младший бит (LSB). После символа идет либо бит четности, либо еще один стоповый бит. При этом пользователь имеет возможность выбирать один из трех вариантов: контроль на четность, или на нечетность, либо отсутствие контроля. В режиме ASCII передача одного символа требует передачи 10 битов, а в режиме RTU – 11. При асинхронной связи символы могут пересылаться либо вплотную, либо с временным интервалом между ними. Последовательности символов, образующих сообщения, имеют различные структуры в зависимости от режима – ASCII или RTU.[ Источник]
Тематики
EN
Русско-английский словарь нормативно-технической терминологии > протокол Modbus RTU
20 свинцово-кислотная аккумуляторная батарея
свинцово-кислотная аккумуляторная батарея
Аккумуляторная батарея, в которой электроды изготовлены главным образом из свинца, а электролит представляет собой раствор серной кислоты.
[Инструкция по эксплуатации стационарных свинцово-кислотных аккумуляторных батарей в составе ЭПУ на объектах ВСС России. Москва 1998 г.]
Свинцово-кислотные аккумуляторы для стационарного оборудования связиО. Чекстер, И. Джосан
Источник: http://www.solarhome.ru/biblio/accu/chekster.htm
При организации электропитания аппаратуры связи широкое применение находят аккумуляторные установки: их применяют для обеспечения бесперебойности и надлежащего качества электропитания оборудования связи, в том числе при перерывах внешнего электроснабжения, а также для обеспечения запуска и работы автоматики собственных электростанций и электроагрегатов. В подавляющем большинстве аккумуляторных установок используются стационарные свинцово-кислотные элементы и моноблоки.
Свинцово-кислотные аккумуляторы: за и против
Преимущественное применение свинцово-кислотных аккумуляторов объясняется целым рядом их достоинств.
- Во-первых, диапазон емкостей аккумуляторов находится в пределах от единиц ампер-часов до десятков килоампер-часов, что позволяет обеспечивать комплектацию батарей любого необходимого резерва.
- Во-вторых, соотношение между конечными зарядным и разрядным напряжениями при зарядах и разрядах свинцово-кислотных аккумуляторов имеет наименьшее значение из всех электрохимических систем источников тока, что позволяет обеспечивать низкий перепад напряжения на нагрузке во всех режимах работы электропитающей установки.
- В-третьих, свинцово-кислотные аккумуляторы отличаются низкой величиной саморазряда и возможностью сохранения заряда (емкости) при длительном подзаряде.
- В-четвертых, свинцово-кислотные аккумуляторы обладают сравнительно низким внутренним сопротивлением, что обуславливает достаточную стабильность напряжения питания при динамических изменениях сопротивления нагрузки.
Вместе с тем свинцово-кислотным аккумуляторам присущи недостатки, ограничивающие сферу их применения и усложняющие организацию их эксплуатации.
Из-за низкой удельной плотности запасаемой энергии свинцово-кислотные аккумуляторы имеют достаточно большие массогабаритные параметры. Однако для стационарного применения этот показатель не имеет главенствующего значения в отличие от применения аккумуляторов для питания мобильных устройств.
Поскольку в установках свинцово-кислотных аккумуляторов происходит газообразование, для обеспечения взрывобезопасности должна быть налажена естественная или принудительная вентиляция - в зависимости от условий применения и типа аккумуляторов. По этой же причине аккумуляторные установки нельзя размещать в герметичных шкафах, отсеках и т.д.
Разряженные свинцово-кислотные аккумуляторы требуют немедленного заряда. В противном случае переход мелкокристаллического сульфата свинца на поверхности электродов в крупнокристаллическую фазу может привести к безвозвратной потере емкости аккумуляторов. В связи с этим при длительном хранении такие аккумуляторы (кроме сухозаряженных) необходимо периодически дозаряжать.
Типы аккумуляторов
По исполнению
Согласно классификации МЭК (стандарт МЭК 50 (486)-1991) свинцово-кислотные аккумуляторы выпускаются в открытом и закрытом исполнении.
Открытые аккумуляторы - это аккумуляторы, имеющие крышку с отверстием, через которое могут удаляться газообразные продукты, заливаться электролит, производиться замер плотности электролита. Отверстия могут быть снабжены системой вентиляции.
Закрытые аккумуляторы - это аккумуляторы, закрытые в обычных условиях работы, но снабженные устройствами, позволяющими выделяться газу, когда внутреннее давление превышает установленное значение. Дополнительная доливка воды в такие аккумуляторы невозможна. Эти аккумуляторы остаются закрытыми, имеют низкое газообразование при соблюдении условий эксплуатации, указанных изготовителем, и предназначены для работы в исходном герметизированном состоянии на протяжении всего срока службы. Их еще называют аккумуляторами с регулируемым клапаном, герметизированными или безуходными.
В свинцово-кислотных аккумуляторах во всех режимах их работы, в том числе и при разомкнутой цепи нагрузки (холостой ход), происходит сульфатация поверхности электродов и газообразование с расходом на эти реакции воды, входящей в состав электролита. Это вынуждает при эксплуатации обычных открытых аккумуляторов производить периодический контроль уровня и плотности электролита, доливку дистиллированной воды с проведением уравнительных зарядов, что является довольно трудоемким процессом.
В герметизированных аккумуляторах за счет применения материалов с пониженным содержанием примесей, иммобилизации электролита и других конструктивных особенностей интенсивность сульфатации и газообразования существенно снижена, что позволяет размещать такие аккумуляторы вместе с питаемым оборудованием.
По конструкции электродов
Область применения и особенности эксплуатации свинцово-кислотных аккумуляторов определяются их конструкцией. По типу конструкции положительных электродов (пластин) различают следующие типы аккумуляторов:
- с электродами большой поверхности (по классификации немецкого стандарта DIN VDE 510 - GroE);
- с панцирными (трубчатыми) положительными электродами (по классификации DIN - OPzS и OPzV);
- с намазными и стержневыми положительными электродами (по классификации DIN - Ogi).
Герметизированные аккумуляторы, как правило, имеют намазные положительные и отрицательные электроды (за исключением аккумуляторов OPzV).
Критерии выбора
При выборе типа стационарного свинцово-кислотного аккумулятора, наиболее пригодного для конкретной области применения, необходимо руководствоваться следующими критериями:
- режим разряда и отдаваемая при этом емкость;
- особенности размещения;
- особенности эксплуатации;
- срок службы;
- стоимость.
Режим разряда
При выборе аккумуляторов для определенного режима разряда следует учитывать, что при коротких режимах разряда коэффициент отдачи аккумуляторов по емкости меньше единицы. При одинаковой емкости отдача элементов с электродами большой поверхности выше в два раза, чем для элементов с панцирными электродами, и в полтора раза - чем для элементов с намазными электродами.
Стоимость
Стоимость аккумулятора зависит от его типа: как правило, аккумуляторы с электродами большой поверхности дороже панцирных, а намазные - дешевле и тех и других. Герметизированные аккумуляторы стоят больше, чем открытые.
Срок службы
Самыми долговечными при соблюдении правил эксплуатации являются аккумуляторы с электродами большой поверхности, для которых срок службы составляет 20 и более лет. Второе место по сроку службы занимают аккумуляторы с панцирными электродами - примерно 16-18 лет. Срок службы аккумуляторов с намазными электродами достигает 10-12 лет. Примерно такие же сроки эксплуатации имеют герметизированные аккумуляторы.
Однако ряд производителей выпускает герметизированные аккумуляторы и с меньшим сроком службы, но более дешевые. По классификации европейского объединения производителей аккумуляторов EUROBAT эти герметизированные аккумуляторы подразделяются на 4 класса по характеристикам и сроку службы:
- более 12 лет;
- 10-12 лет;
- 6-9 лет;
- 3-5 лет.
Аккумуляторы с короткими сроками службы, как правило, дешевле остальных и предназначены в основном для использования в качестве резервных источников тока в установках бесперебойного питания переменным током (UPS) и на временных объектах связи.
Следует учитывать, что указанные выше значения срока службы соответствуют средней температуре эксплуатации 20 °С. При увеличении температуры эксплуатации на каждые 10 °С за счет увеличения скорости электрохимических процессов в аккумуляторах их срок службы будет сокращаться в 2 раза.
Размещение
По величине занимаемой площади при эксплуатации преимущество имеют герметизированные аккумуляторы. За ними в порядке возрастания занимаемой площади следуют аккумуляторы открытых типов с намазными электродами, панцирными электродами и с электродами большой поверхности.
Размещать герметизированные аккумуляторы при эксплуатации, как правило, допускается и в вертикальном, и в горизонтальном положении - это позволяет более экономно использовать площадь под размещение электрооборудования. При горизонтальном размещении герметизированных аккумуляторов, если нет других предписаний производителя, аккумуляторы устанавливаются таким образом, чтобы пакеты электродных пластин занимали вертикальное положение.
Эксплуатация
Минимальных трудовых затрат при эксплуатации требуют герметизированные аккумуляторы. Остальные типы аккумуляторов требуют больших трудозатрат обслуживающего персонала, особенно те устройства, у которых величина примеси сурьмы в положительных решетках превышает 3%.
Качество сборки, а также укупорка соединения крышки с транспортировочной пробкой (для аккумуляторов открытых типов) или предохранительным клапаном (для герметизированных аккумуляторов) должны обеспечивать герметизацию аккумуляторов при избыточном или пониженном на 20 кПа (150 мм рт. ст.) атмосферном давлении и исключать попадание внутрь атмосферного кислорода и влаги, способных ускорять сульфатацию электродов и коррозию токосборов и борнов у сухозаряженных аккумуляторов при хранении, а также исключать выход изнутри кислоты и аэрозолей при их эксплуатации. Для герметизированных аккумуляторов, кроме того, качество укупорки должно обеспечивать нормальные условия рекомбинации кислорода и ограничивать выход газа при заданных изготовителем эксплуатационных режимах работы.
Электрические характеристики
Емкость
Основным параметром, характеризующим качество аккумулятора при заданных массогабаритных показателях, является его электрическая емкость, определяемая по числу ампер-часов электричества, получаемого при разряде аккумулятора определенным током до заданного конечного напряжения.
По классификации ГОСТ Р МЭК 896-1-95, номинальная емкость стационарного аккумулятора (С10) определяется по времени его разряда током десятичасового режима разряда до конечного напряжения 1,8 В/эл. при средней температуре электролита при разряде 20 °С. Если средняя температура электролита при разряде отличается от 20 °С, полученное значение фактической емкости (Сф) приводят к температуре 20 °С, используя формулу:
С = Сф / [1 + z(t - 20)]
где z - температурный коэффициент емкости, равный 0,006 °С-1 (для режимов разряда более часа) и 0,01 °С-1 (для режимов разряда, равных одному часу и менее); t - фактическое значение средней температуры электролита при разряде, °С.
Емкость аккумуляторов при более коротких режимах разряда меньше номинальной и при температуре электролита (20 ± 5) °С для аккумуляторов с разными типами электродов должна быть не менее указанных в таблице значений (с учетом обеспечения приемлемых пределов изменения напряжения на аппаратуре связи).
Как правило, при вводе в эксплуатацию аккумуляторов с малым сроком хранения на первом цикле разряда батарея должна отдавать не менее 95% емкости, указанной в таблице для 10-, 5-, 3- и 1-часового режимов разряда, а на 5-10-м цикле разряда (в зависимости от предписания изготовителя) -не менее 100% емкости, указанной в таблице для 10-, 5-, 3-, 1- и 0,5-часового режимов разряда.
При выборе аккумуляторов следует обращать внимание на то, при каких условиях задается изготовителем значение номинальной емкости. Если значение емкости задается при более высокой температуре, то для сравнения данного типа аккумулятора с другими необходимо предварительно пересчитать емкость на температуру 20 °С. Если значение емкости задается при более низком конечном напряжении разряда, необходимо пересчитать емкость по данным разряда аккумуляторов постоянным током, приводимую в эксплуатационной документации или рекламных данных производителя для данного режима разряда, до конечного напряжения, указанного в таблице.
Кроме того, при оценке аккумулятора следует учитывать исходное значение плотности электролита, при которой задается емкость: если исходная плотность повышена, то весьма вероятно, что срок службы аккумулятора сократится.
Пригодность к буферной работе
Другим параметром, характеризующим стационарные свинцово-кислотные аккумуляторы, является их пригодность к буферной работе. Это означает, что предварительно заряженная батарея, подключенная параллельно с нагрузкой к выпрямительным устройствам, должна сохранять свою емкость при указанном изготовителем напряжении подзаряда и заданной его нестабильности. Обычно напряжение подзаряда Uпз указывается для каждого типа аккумулятора и находится в пределах 2,18-2,27 В/эл. (при 20 °С). При эксплуатации с другими климатическими условиями следует учитывать температурный коэффициент изменения напряжения подзаряда.
Нестабильность подзарядного напряжения для основных типов аккумуляторов не должна превышать 1%, что накладывает определенные требования на выбор выпрямительных устройств при проектировании электропитающих установок связи.
При буферной работе для достижения приемлемого срока службы свинцово-кислотных аккумуляторов необходимо не превышать допустимый ток их заряда, который задается различными производителями в пределах 0,1-0,3 С10. При этом следует помнить, что ток заряда аккумуляторов с напряжением, превосходящим 2,4 В/эл., не должен превышать величину 0,05 С10.
Разброс напряжения элементов
Важным параметром, определяемым технологией изготовления аккумуляторов, является разброс напряжения отдельных элементов в составе батареи при заряде, подзаряде и разряде. Для открытых типов аккумуляторов этот параметр задается изготовителем, как правило, в пределах ± 2% от среднего значения. При коротких режимах разряда (1-часовом и менее) разброс напряжений не должен превышать +5%. Обычно для аккумуляторов с содержанием более 2% сурьмы в основе положительных электродов разброс напряжений отдельных элементов в батарее значительно ниже вышеуказанного и не приводит к осложнениям в процессе эксплуатации аккумуляторных установок.
Для аккумуляторов с меньшим содержанием сурьмы в основе положительных электродов или с безсурьмянистыми сплавами указанный разброс напряжения элементов значительно больше и в первый год после ввода в действие может составлять +10% от среднего значения с последующим снижением в процессе эксплуатации.
Отсутствие тенденции к снижению величины разброса напряжения в течение первого года после ввода в действие или увеличение разброса напряжения при последующей эксплуатации свидетельствует о дефектах устройства или о нарушении условий эксплуатации.
Особенно опасно длительное превышение напряжения на отдельных элементах в составе батареи, превышающее 2,4 В/эл., поскольку это может привести к повышенному расходу воды в отдельных элементах при заряде или подзаряде батареи и к сокращению срока ее службы или повышению трудоемкости обслуживания (для аккумуляторов открытых типов это означает более частые доливки воды). Кроме того, значительный разброс напряжения элементов в батарее может привести к потере ее емкости вследствие чрезмерно глубокого разряда отдельных элементов при разряде батареи.
Саморазряд
Качество технологии изготовления аккумуляторов оценивается также и по такой характеристике, как саморазряд.
Саморазряд (по определению ГОСТ Р МЭК 896-1-95 - сохранность заряда) определяется как процентная доля потери емкости бездействующим аккумулятором (при разомкнутой внешней цепи) при хранении в течение заданного промежутка времени при температуре 20 °С. Этот параметр определяет продолжительность хранения батареи в промежутках между очередными зарядами, а также величину подзарядного тока заряженной батареи.
Величина саморазряда в значительной степени зависит от температуры электролита, поэтому для уменьшения подзарядного тока батареи в буферном режиме ее работы или для увеличения времени хранения батареи в бездействии целесообразно выбирать помещения с пониженной средней температурой.
Обычно среднесуточный саморазряд открытых типов аккумуляторов при 90-суточном хранении при температуре 20 ° С не должен превышать 1% номинальной емкости, с ростом температуры на 10 °С это значение удваивается. Среднесуточный саморазряд герметизированных аккумуляторов при тех же условиях хранения, как правило, не должен превышать 0,1% номинальной емкости.
Внутреннее сопротивление и ток короткого замыкания
Для расчета цепей автоматики и защиты аккумуляторных батарей ГОСТ Р МЭК 896-1-95 регламентирует такие характеристики аккумуляторов как их внутреннее сопротивление и ток короткого замыкания. Эти параметры определяются расчетным путем по установившимся значениям напряжения при разряде батарей токами достаточно большой величины (обычно равными 4 С10 и 20 С10) и должны приводиться в технической документации производителя. По этим данным может быть рассчитан такой выходной динамический параметр электропитающей установки (ЭПУ), как нестабильность ее выходного напряжения при скачкообразных изменениях тока нагрузки, поскольку в буферных ЭПУ выходное сопротивление установки в основном определяется внутренним сопротивлением батареи.
Примечание:
"Бумажная" версия статьи содержит сводную таблицу характеристик аккумуляторов (стр. 126-128). Так как формат таблицы очень неудобен для размещения на сайте, здесь эта таблица не приводится.
Тематики
EN
Русско-английский словарь нормативно-технической терминологии > свинцово-кислотная аккумуляторная батарея
Страницы- 1
- 2
См. также в других словарях:
Контроль учётных записей пользователей — (англ. User Account Control, UAC) компонент операционных систем Microsoft Windows, впервые появившийся в Windows Vista. Этот компонент запрашивает подтверждение действий, требующих прав администратора, в целях защиты от… … Википедия
контроль — 2.7 контроль (control): Примечание В контексте безопасности информационно телекоммуникационных технологий термин «контроль» может считаться синонимом «защитной меры» (см. 2.24). Источник … Словарь-справочник терминов нормативно-технической документации
Контроль четности — В вычислительной технике и сетях передачи данных битом чётности называют контрольный бит, принимающий значения 0 или 1 и служащий для проверки общей чётности двоичного числа (чётности количества единичных битов в числе). Содержание 1 Примеры 2… … Википедия
Контроль чётности — В вычислительной технике и сетях передачи данных битом чётности называют контрольный бит, принимающий значения 0 или 1 и служащий для проверки общей чётности двоичного числа (чётности количества единичных битов в числе). Содержание 1 Примеры 2… … Википедия
ОБРАБОТКА ДАННЫХ — комплекс процедур, направленных на преобразование и обобщение данных социологического исследования. В отечественной социологии термин трактуется очень широко. Обычно к О.Д. относят процедуры проверки и кодирования заполненного инструментария, в… … Социология: Энциклопедия
ГОСТ Р ИСО/МЭК 19762-1-2011: Информационные технологии. Технологии автоматической идентификации и сбора данных (АИСД). Гармонизированный словарь. Часть 1. Общие термины в области АИСД — Терминология ГОСТ Р ИСО/МЭК 19762 1 2011: Информационные технологии. Технологии автоматической идентификации и сбора данных (АИСД). Гармонизированный словарь. Часть 1. Общие термины в области АИСД оригинал документа: Accredited Standards… … Словарь-справочник терминов нормативно-технической документации
инженерные системы центра обработки данных — [Интент] Инженерные системы — наиболее дорогостоящая составляющая ЦОД, но именно благодаря ей удается обеспечить надлежащее функционирование размещаемого оборудования. При строительстве центра обработки данных (ЦОД) приходится учитывать… … Справочник технического переводчика
Обработка данных — Возможно, эта статья содержит оригинальное исследование. Добавьте ссылки на источники, в противном случае она может быть выставлена на удаление. Дополнительные сведения могут быть на странице обсуждения. (25 мая 2011) На настоящий момент,… … Википедия
СТО 17230282.27.100.005-2008: Основные элементы котлов, турбин и трубопроводов ТЭС. Контроль состояния металла. Нормы и требования — Терминология СТО 17230282.27.100.005 2008: Основные элементы котлов, турбин и трубопроводов ТЭС. Контроль состояния металла. Нормы и требования: 2c = l1 + l2 + t Определения термина из разных документов: c 3.1 авария : Разрушение сооружений и… … Словарь-справочник терминов нормативно-технической документации
Средство переноса данных Windows — В данной статье или разделе имеется список источников или внешних ссылок, но источники отдельных утверждений остаются неясными из за отсутствия сносок … Википедия
Предотвращение выполнения данных — В данной статье или разделе имеется список источников или внешних ссылок, но источники отдельных утверждений остаются неясными из за отсутствия сносок … Википедия
 18+© Академик, 2000-2024
18+© Академик, 2000-2024- Обратная связь: Техподдержка, Реклама на сайте
Экспорт словарей на сайты, сделанные на PHP, Joomla, Drupal, WordPress, MODx.
Перевод: с русского на все языки
со всех языков на русский- Со всех языков на:
- Русский
- С русского на:
- Все языки
- Английский
- Немецкий
- Французский