-
1 SSR system
-
2 finishing work
отделочные работы
Комплекс строительных работ, связанных с наружной и внутренней отделкой зданий и сооружений с целью повышения их эксплуатационных и эстетических качеств.
[БСЭ]О. р. являются завершающим этапом строительства; от их качественного выполнения во многом зависит общая оценка здания или сооружения, сдаваемого в эксплуатацию. К основным О. р. относят: облицовочные работы, штукатурные работы, покрытие полов (в т. ч. паркетные работы), малярные работы, обойные работы, стекольные работы.
В практике современного строительства жилых, обществ. и промышленных зданий технология производства О. р. существенно изменилась. Всё большее применение находят сборные крупноразмерные элементы, конструкции и детали заводского изготовления, доставляемые на строит. площадку в окончательно отделанном виде (например, панели стен и перекрытий, санитарно-технические кабины, оконные и дверные блоки и др.), что значительно сокращает общий объём послемонтажных О. р. Промышленностью освоен выпуск ряда эффективных отделочных материалов, позволяющих отказаться от наиболее трудоёмких и длительных, т. н. "мокрых", процессов и улучшить качество отделки (листы сухой штукатурки, облицовочные плиты и плитки из пластмасс, влагостойкие обои и т.п.).
О. р. на строительных объектах выполняют при помощи разнообразных средств механизации (передвижные штукатурные ималярные станции, агрегаты для устройства полов из полимерных материалов, шпаклёвочные аппараты, шлифовальные машины, затирочные машины, электрокраскопульты, вибронасосы и др.), значительно облегчающих и ускоряющих процессы отделки зданий и сокращающих количество технологических операций. Однако О. р. всё ещё весьма трудоёмки и составляют в жилищно-гражданском строительстве до 35% всех трудовых затрат на строительно-монтажных работах.
Один из наиболее трудоёмких видово. р. — облицовочные работы, назначением которых является покрытие лицевых поверхностей конструкций штучными изделиями из естественных или искусственных материалов. Все облицовочные изделия обычно поставляют на строительный объект согласно заданным размерам, расцветкам и фактурам, в готовом к применению виде. По виду используемых изделий и способам их крепления к поверхностям различают облицовочные работы наружные и внутренние.
Наружные облицовочные работы сводятся главным образом к облицовке фасадов зданий и сооружений плитами и деталями из природного камня, лицевым кирпичом, керамическими камнями и т.п.; их выполняют, как правило, с внутренних подмостей одновременно с кладкой стен; пространство между стеной и облицовкой заполняют цементным раствором. Иногда каменную облицовку делают по готовым стенам; в этом случае её ведут с наружных лесов (см. Леса строительные). К стене облицовку прикрепляют с помощью монтажных приспособлений (т. н. закрепов, заделываемых в отверстия, высверленные в стене) и заливки пазух раствором. Применяется также крепление облицовки посредством установленных в стене стальных шин или стержней (т. н. облицовка на относе). Конструкция облицовки должна исключать возможность проникновения влаги через швы и стыки облицовочных изделий.
Для внутренних облицовочных работ, заключающихся в основном в облицовке стен, полов и потолков, в современном массовом строительстве применяется широкий ассортимент материалови изделий, позволяющих разнообразить и улучшать отделку интерьеров зданий: керамические и пластмассовые плитки, древесностружечные, древесноволокнистые и асбестоцементные плиты (в т. ч. с эмалированной поверхностью), декоративная фанера, бумажно-слоистый пластик, декоративно-акустические плиты и т.п. Облицовочные работы внутри зданий выполняются, как правило, после окончания общестроительных работ; до начала работ должны быть проложены все скрытые проводки, закончено устройство стояков и санитарно-технических трубопроводов; облицовываемые поверхности выравнивают и просушивают, изделия сортируют по форме, размерам и цветам, при необходимости в изделиях пришлифовывают кромки и просверливают отверстия. Крепят изделия на растворах, мастиках, с помощью обрамляющих фасонных раскладок, на шурупах и др. способами.
[БСЭ]Тематики
EN
работы отделочные
Строительные работы, обеспечивающие повышение долговечности и улучшение декоративных и санитарно-гигиенических качеств лицевых поверхностей различных конструктивных элементов зданий и сооружений
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]Тематики
EN
DE
FR
Англо-русский словарь нормативно-технической терминологии > finishing work
-
3 démarreur magnétique
электромагнитный пускатель
Пускатель, у которого сила, необходимая для замыкания главных контактов, обеспечивается электромагнитом.
[ ГОСТ Р 50030.4.1-2002 (МЭК 60947-4-1-2000)]
пускатель магнитный
Электрический выключатель переменного тока с магнитным приводом, предназначенный, главным образом, для дистанционного пуска, остановки и защиты трёхфазных асинхронных электродвигателей с короткозамкнутым ротором
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]
магнитный пускатель
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]EN
electromagnetic starter
starter in which the force for closing the main contacts is provided by an electromagnet
[IEC 60947-4-1, ed. 3.0 (2009-09)]FR
démarreur électromagnétique
démarreur pour lequel l'effort nécessaire à la fermeture des contacts principaux est fourni par un électro-aimant
[IEC 60947-4-1, ed. 3.0 (2009-09)]Магнитные пускатели переменного тока предназначены в основном для дистанционного управления асинхронными электродвигателями. Осуществляют также нулевую защиту, т. е. при исчезновении напряжения или его снижении на 40-60 % от номинального магнитная система отпадает и главные контакты размыкаются. В комплекте с тепловым реле пускатели выполняют также защиту электродвигателей от перегрузок и от токов, возникающих при обрыве одной из фаз.
Пускатели выпускаются в открытом, защищенном и пылебрызгонепроницаемом исполнениях, с тепловыми реле и без них, бывают реверсивными и нереверсивными.
Устройство пускателя серии ПМЕ
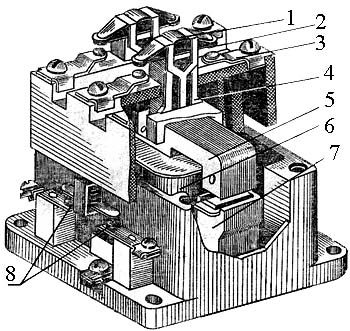
Внутри корпуса пускателя размещена электромагнитная система, включающая в себя неподвижную Ш-образную часть сердечника 7 и обмотку 6, намотанную на катушку. Сердечник набран из изолированных друг от друга (для уменьшения потерь от вихревых токов) листов электротехнической стали. Подвижная часть сердечника 5 (якорь) соединена с пластмассовой траверсой 4, на которой смонтированы контактные мостики 2 с подвижными контактами. Плавность замыкания контактов и необходимое усилие нажатия обеспечиваются контактными пружинами 1. Неподвижные контакты припаяны к контактным пластинам 3, снабженным винтовыми зажимами для присоединения проводов внешней цепи. Кроме главных контактов, пускатели имеют дополнительные (блокировочные) контакты 8, расположенные на боковых поверхностях аппарата. Главные контакты закрыты крышкой, защищающей их от загрязнения, случайных прикосновений и междуфазных замыканий.
[ http://www.electromonter.info/handbook/magnetic_starter.html]
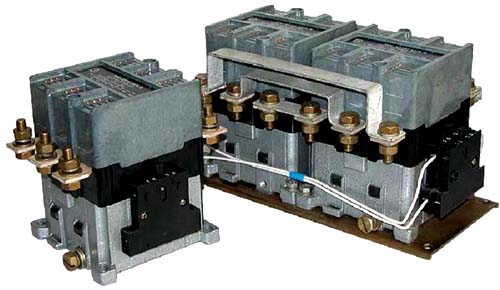
Пускатели электромагнитные типа ПМ12-125
Пускатели электромагнитные типа ПМ12-125 предназначены для применения главным образом в стационарных установках для дистанционного пуска непосредственным подключением к сети, останова и реверсирования трехфазных асинхронных электродвигателей с короткозамкнутым ротором при напряжении до 660 В переменного тока частотой 50 или 60 Гц.
Для ограничения коммутационных перенапряжений, возникающих при отключении пускателей на катушках управления, могут устанавливаться ограничители перенапряжений (ОПН). Пускатели, комплектуемые ОПН, пригодны для работы в системах управления с применением микропроцессорной техники
[ http://www.kzeap.ru/katalog/k022.pdf]Тематики
Синонимы
EN
- automatic tripping contactor
- electromagnetic starter
- M/S
- magnetic starter
- magnetic switch
- motor contactor
- solenoid starter
DE
FR
Франко-русский словарь нормативно-технической терминологии > démarreur magnétique
-
4 démarreur électromagnétique
электромагнитный пускатель
Пускатель, у которого сила, необходимая для замыкания главных контактов, обеспечивается электромагнитом.
[ ГОСТ Р 50030.4.1-2002 (МЭК 60947-4-1-2000)]
пускатель магнитный
Электрический выключатель переменного тока с магнитным приводом, предназначенный, главным образом, для дистанционного пуска, остановки и защиты трёхфазных асинхронных электродвигателей с короткозамкнутым ротором
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]
магнитный пускатель
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]EN
electromagnetic starter
starter in which the force for closing the main contacts is provided by an electromagnet
[IEC 60947-4-1, ed. 3.0 (2009-09)]FR
démarreur électromagnétique
démarreur pour lequel l'effort nécessaire à la fermeture des contacts principaux est fourni par un électro-aimant
[IEC 60947-4-1, ed. 3.0 (2009-09)]Магнитные пускатели переменного тока предназначены в основном для дистанционного управления асинхронными электродвигателями. Осуществляют также нулевую защиту, т. е. при исчезновении напряжения или его снижении на 40-60 % от номинального магнитная система отпадает и главные контакты размыкаются. В комплекте с тепловым реле пускатели выполняют также защиту электродвигателей от перегрузок и от токов, возникающих при обрыве одной из фаз.
Пускатели выпускаются в открытом, защищенном и пылебрызгонепроницаемом исполнениях, с тепловыми реле и без них, бывают реверсивными и нереверсивными.
Устройство пускателя серии ПМЕ
Внутри корпуса пускателя размещена электромагнитная система, включающая в себя неподвижную Ш-образную часть сердечника 7 и обмотку 6, намотанную на катушку. Сердечник набран из изолированных друг от друга (для уменьшения потерь от вихревых токов) листов электротехнической стали. Подвижная часть сердечника 5 (якорь) соединена с пластмассовой траверсой 4, на которой смонтированы контактные мостики 2 с подвижными контактами. Плавность замыкания контактов и необходимое усилие нажатия обеспечиваются контактными пружинами 1. Неподвижные контакты припаяны к контактным пластинам 3, снабженным винтовыми зажимами для присоединения проводов внешней цепи. Кроме главных контактов, пускатели имеют дополнительные (блокировочные) контакты 8, расположенные на боковых поверхностях аппарата. Главные контакты закрыты крышкой, защищающей их от загрязнения, случайных прикосновений и междуфазных замыканий.
[ http://www.electromonter.info/handbook/magnetic_starter.html]
Пускатели электромагнитные типа ПМ12-125
Пускатели электромагнитные типа ПМ12-125 предназначены для применения главным образом в стационарных установках для дистанционного пуска непосредственным подключением к сети, останова и реверсирования трехфазных асинхронных электродвигателей с короткозамкнутым ротором при напряжении до 660 В переменного тока частотой 50 или 60 Гц.
Для ограничения коммутационных перенапряжений, возникающих при отключении пускателей на катушках управления, могут устанавливаться ограничители перенапряжений (ОПН). Пускатели, комплектуемые ОПН, пригодны для работы в системах управления с применением микропроцессорной техники
[ http://www.kzeap.ru/katalog/k022.pdf]Тематики
Синонимы
EN
- automatic tripping contactor
- electromagnetic starter
- M/S
- magnetic starter
- magnetic switch
- motor contactor
- solenoid starter
DE
FR
Франко-русский словарь нормативно-технической терминологии > démarreur électromagnétique
-
5 Magnetanlasser
электромагнитный пускатель
Пускатель, у которого сила, необходимая для замыкания главных контактов, обеспечивается электромагнитом.
[ ГОСТ Р 50030.4.1-2002 (МЭК 60947-4-1-2000)]
пускатель магнитный
Электрический выключатель переменного тока с магнитным приводом, предназначенный, главным образом, для дистанционного пуска, остановки и защиты трёхфазных асинхронных электродвигателей с короткозамкнутым ротором
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]
магнитный пускатель
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]EN
electromagnetic starter
starter in which the force for closing the main contacts is provided by an electromagnet
[IEC 60947-4-1, ed. 3.0 (2009-09)]FR
démarreur électromagnétique
démarreur pour lequel l'effort nécessaire à la fermeture des contacts principaux est fourni par un électro-aimant
[IEC 60947-4-1, ed. 3.0 (2009-09)]Магнитные пускатели переменного тока предназначены в основном для дистанционного управления асинхронными электродвигателями. Осуществляют также нулевую защиту, т. е. при исчезновении напряжения или его снижении на 40-60 % от номинального магнитная система отпадает и главные контакты размыкаются. В комплекте с тепловым реле пускатели выполняют также защиту электродвигателей от перегрузок и от токов, возникающих при обрыве одной из фаз.
Пускатели выпускаются в открытом, защищенном и пылебрызгонепроницаемом исполнениях, с тепловыми реле и без них, бывают реверсивными и нереверсивными.
Устройство пускателя серии ПМЕ
Внутри корпуса пускателя размещена электромагнитная система, включающая в себя неподвижную Ш-образную часть сердечника 7 и обмотку 6, намотанную на катушку. Сердечник набран из изолированных друг от друга (для уменьшения потерь от вихревых токов) листов электротехнической стали. Подвижная часть сердечника 5 (якорь) соединена с пластмассовой траверсой 4, на которой смонтированы контактные мостики 2 с подвижными контактами. Плавность замыкания контактов и необходимое усилие нажатия обеспечиваются контактными пружинами 1. Неподвижные контакты припаяны к контактным пластинам 3, снабженным винтовыми зажимами для присоединения проводов внешней цепи. Кроме главных контактов, пускатели имеют дополнительные (блокировочные) контакты 8, расположенные на боковых поверхностях аппарата. Главные контакты закрыты крышкой, защищающей их от загрязнения, случайных прикосновений и междуфазных замыканий.
[ http://www.electromonter.info/handbook/magnetic_starter.html]
Пускатели электромагнитные типа ПМ12-125
Пускатели электромагнитные типа ПМ12-125 предназначены для применения главным образом в стационарных установках для дистанционного пуска непосредственным подключением к сети, останова и реверсирования трехфазных асинхронных электродвигателей с короткозамкнутым ротором при напряжении до 660 В переменного тока частотой 50 или 60 Гц.
Для ограничения коммутационных перенапряжений, возникающих при отключении пускателей на катушках управления, могут устанавливаться ограничители перенапряжений (ОПН). Пускатели, комплектуемые ОПН, пригодны для работы в системах управления с применением микропроцессорной техники
[ http://www.kzeap.ru/katalog/k022.pdf]Тематики
Синонимы
EN
- automatic tripping contactor
- electromagnetic starter
- M/S
- magnetic starter
- magnetic switch
- motor contactor
- solenoid starter
DE
FR
Немецко-русский словарь нормативно-технической терминологии > Magnetanlasser
-
6 magnetischer Anlasser
электромагнитный пускатель
Пускатель, у которого сила, необходимая для замыкания главных контактов, обеспечивается электромагнитом.
[ ГОСТ Р 50030.4.1-2002 (МЭК 60947-4-1-2000)]
пускатель магнитный
Электрический выключатель переменного тока с магнитным приводом, предназначенный, главным образом, для дистанционного пуска, остановки и защиты трёхфазных асинхронных электродвигателей с короткозамкнутым ротором
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]
магнитный пускатель
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]EN
electromagnetic starter
starter in which the force for closing the main contacts is provided by an electromagnet
[IEC 60947-4-1, ed. 3.0 (2009-09)]FR
démarreur électromagnétique
démarreur pour lequel l'effort nécessaire à la fermeture des contacts principaux est fourni par un électro-aimant
[IEC 60947-4-1, ed. 3.0 (2009-09)]Магнитные пускатели переменного тока предназначены в основном для дистанционного управления асинхронными электродвигателями. Осуществляют также нулевую защиту, т. е. при исчезновении напряжения или его снижении на 40-60 % от номинального магнитная система отпадает и главные контакты размыкаются. В комплекте с тепловым реле пускатели выполняют также защиту электродвигателей от перегрузок и от токов, возникающих при обрыве одной из фаз.
Пускатели выпускаются в открытом, защищенном и пылебрызгонепроницаемом исполнениях, с тепловыми реле и без них, бывают реверсивными и нереверсивными.
Устройство пускателя серии ПМЕ
Внутри корпуса пускателя размещена электромагнитная система, включающая в себя неподвижную Ш-образную часть сердечника 7 и обмотку 6, намотанную на катушку. Сердечник набран из изолированных друг от друга (для уменьшения потерь от вихревых токов) листов электротехнической стали. Подвижная часть сердечника 5 (якорь) соединена с пластмассовой траверсой 4, на которой смонтированы контактные мостики 2 с подвижными контактами. Плавность замыкания контактов и необходимое усилие нажатия обеспечиваются контактными пружинами 1. Неподвижные контакты припаяны к контактным пластинам 3, снабженным винтовыми зажимами для присоединения проводов внешней цепи. Кроме главных контактов, пускатели имеют дополнительные (блокировочные) контакты 8, расположенные на боковых поверхностях аппарата. Главные контакты закрыты крышкой, защищающей их от загрязнения, случайных прикосновений и междуфазных замыканий.
[ http://www.electromonter.info/handbook/magnetic_starter.html]
Пускатели электромагнитные типа ПМ12-125
Пускатели электромагнитные типа ПМ12-125 предназначены для применения главным образом в стационарных установках для дистанционного пуска непосредственным подключением к сети, останова и реверсирования трехфазных асинхронных электродвигателей с короткозамкнутым ротором при напряжении до 660 В переменного тока частотой 50 или 60 Гц.
Для ограничения коммутационных перенапряжений, возникающих при отключении пускателей на катушках управления, могут устанавливаться ограничители перенапряжений (ОПН). Пускатели, комплектуемые ОПН, пригодны для работы в системах управления с применением микропроцессорной техники
[ http://www.kzeap.ru/katalog/k022.pdf]Тематики
Синонимы
EN
- automatic tripping contactor
- electromagnetic starter
- M/S
- magnetic starter
- magnetic switch
- motor contactor
- solenoid starter
DE
FR
Немецко-русский словарь нормативно-технической терминологии > magnetischer Anlasser
-
7 automatic tripping contactor
контактор с реле
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
электромагнитный пускатель
Пускатель, у которого сила, необходимая для замыкания главных контактов, обеспечивается электромагнитом.
[ ГОСТ Р 50030.4.1-2002 (МЭК 60947-4-1-2000)]
пускатель магнитный
Электрический выключатель переменного тока с магнитным приводом, предназначенный, главным образом, для дистанционного пуска, остановки и защиты трёхфазных асинхронных электродвигателей с короткозамкнутым ротором
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]
магнитный пускатель
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]EN
electromagnetic starter
starter in which the force for closing the main contacts is provided by an electromagnet
[IEC 60947-4-1, ed. 3.0 (2009-09)]FR
démarreur électromagnétique
démarreur pour lequel l'effort nécessaire à la fermeture des contacts principaux est fourni par un électro-aimant
[IEC 60947-4-1, ed. 3.0 (2009-09)]Магнитные пускатели переменного тока предназначены в основном для дистанционного управления асинхронными электродвигателями. Осуществляют также нулевую защиту, т. е. при исчезновении напряжения или его снижении на 40-60 % от номинального магнитная система отпадает и главные контакты размыкаются. В комплекте с тепловым реле пускатели выполняют также защиту электродвигателей от перегрузок и от токов, возникающих при обрыве одной из фаз.
Пускатели выпускаются в открытом, защищенном и пылебрызгонепроницаемом исполнениях, с тепловыми реле и без них, бывают реверсивными и нереверсивными.
Устройство пускателя серии ПМЕ
Внутри корпуса пускателя размещена электромагнитная система, включающая в себя неподвижную Ш-образную часть сердечника 7 и обмотку 6, намотанную на катушку. Сердечник набран из изолированных друг от друга (для уменьшения потерь от вихревых токов) листов электротехнической стали. Подвижная часть сердечника 5 (якорь) соединена с пластмассовой траверсой 4, на которой смонтированы контактные мостики 2 с подвижными контактами. Плавность замыкания контактов и необходимое усилие нажатия обеспечиваются контактными пружинами 1. Неподвижные контакты припаяны к контактным пластинам 3, снабженным винтовыми зажимами для присоединения проводов внешней цепи. Кроме главных контактов, пускатели имеют дополнительные (блокировочные) контакты 8, расположенные на боковых поверхностях аппарата. Главные контакты закрыты крышкой, защищающей их от загрязнения, случайных прикосновений и междуфазных замыканий.
[ http://www.electromonter.info/handbook/magnetic_starter.html]
Пускатели электромагнитные типа ПМ12-125
Пускатели электромагнитные типа ПМ12-125 предназначены для применения главным образом в стационарных установках для дистанционного пуска непосредственным подключением к сети, останова и реверсирования трехфазных асинхронных электродвигателей с короткозамкнутым ротором при напряжении до 660 В переменного тока частотой 50 или 60 Гц.
Для ограничения коммутационных перенапряжений, возникающих при отключении пускателей на катушках управления, могут устанавливаться ограничители перенапряжений (ОПН). Пускатели, комплектуемые ОПН, пригодны для работы в системах управления с применением микропроцессорной техники
[ http://www.kzeap.ru/katalog/k022.pdf]Тематики
Синонимы
EN
- automatic tripping contactor
- electromagnetic starter
- M/S
- magnetic starter
- magnetic switch
- motor contactor
- solenoid starter
DE
FR
Англо-русский словарь нормативно-технической терминологии > automatic tripping contactor
-
8 M/S
- электромагнитный пускатель
- смеситель/отстойник
смеситель/отстойник
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
- mixer/settler
- M/S
электромагнитный пускатель
Пускатель, у которого сила, необходимая для замыкания главных контактов, обеспечивается электромагнитом.
[ ГОСТ Р 50030.4.1-2002 (МЭК 60947-4-1-2000)]
пускатель магнитный
Электрический выключатель переменного тока с магнитным приводом, предназначенный, главным образом, для дистанционного пуска, остановки и защиты трёхфазных асинхронных электродвигателей с короткозамкнутым ротором
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]
магнитный пускатель
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]EN
electromagnetic starter
starter in which the force for closing the main contacts is provided by an electromagnet
[IEC 60947-4-1, ed. 3.0 (2009-09)]FR
démarreur électromagnétique
démarreur pour lequel l'effort nécessaire à la fermeture des contacts principaux est fourni par un électro-aimant
[IEC 60947-4-1, ed. 3.0 (2009-09)]Магнитные пускатели переменного тока предназначены в основном для дистанционного управления асинхронными электродвигателями. Осуществляют также нулевую защиту, т. е. при исчезновении напряжения или его снижении на 40-60 % от номинального магнитная система отпадает и главные контакты размыкаются. В комплекте с тепловым реле пускатели выполняют также защиту электродвигателей от перегрузок и от токов, возникающих при обрыве одной из фаз.
Пускатели выпускаются в открытом, защищенном и пылебрызгонепроницаемом исполнениях, с тепловыми реле и без них, бывают реверсивными и нереверсивными.
Устройство пускателя серии ПМЕ
Внутри корпуса пускателя размещена электромагнитная система, включающая в себя неподвижную Ш-образную часть сердечника 7 и обмотку 6, намотанную на катушку. Сердечник набран из изолированных друг от друга (для уменьшения потерь от вихревых токов) листов электротехнической стали. Подвижная часть сердечника 5 (якорь) соединена с пластмассовой траверсой 4, на которой смонтированы контактные мостики 2 с подвижными контактами. Плавность замыкания контактов и необходимое усилие нажатия обеспечиваются контактными пружинами 1. Неподвижные контакты припаяны к контактным пластинам 3, снабженным винтовыми зажимами для присоединения проводов внешней цепи. Кроме главных контактов, пускатели имеют дополнительные (блокировочные) контакты 8, расположенные на боковых поверхностях аппарата. Главные контакты закрыты крышкой, защищающей их от загрязнения, случайных прикосновений и междуфазных замыканий.
[ http://www.electromonter.info/handbook/magnetic_starter.html]
Пускатели электромагнитные типа ПМ12-125
Пускатели электромагнитные типа ПМ12-125 предназначены для применения главным образом в стационарных установках для дистанционного пуска непосредственным подключением к сети, останова и реверсирования трехфазных асинхронных электродвигателей с короткозамкнутым ротором при напряжении до 660 В переменного тока частотой 50 или 60 Гц.
Для ограничения коммутационных перенапряжений, возникающих при отключении пускателей на катушках управления, могут устанавливаться ограничители перенапряжений (ОПН). Пускатели, комплектуемые ОПН, пригодны для работы в системах управления с применением микропроцессорной техники
[ http://www.kzeap.ru/katalog/k022.pdf]Тематики
Синонимы
EN
- automatic tripping contactor
- electromagnetic starter
- M/S
- magnetic starter
- magnetic switch
- motor contactor
- solenoid starter
DE
FR
Англо-русский словарь нормативно-технической терминологии > M/S
-
9 electromagnetic starter
электромагнитный пускатель
Пускатель, у которого сила, необходимая для замыкания главных контактов, обеспечивается электромагнитом.
[ ГОСТ Р 50030.4.1-2002 (МЭК 60947-4-1-2000)]
пускатель магнитный
Электрический выключатель переменного тока с магнитным приводом, предназначенный, главным образом, для дистанционного пуска, остановки и защиты трёхфазных асинхронных электродвигателей с короткозамкнутым ротором
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]
магнитный пускатель
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]EN
electromagnetic starter
starter in which the force for closing the main contacts is provided by an electromagnet
[IEC 60947-4-1, ed. 3.0 (2009-09)]FR
démarreur électromagnétique
démarreur pour lequel l'effort nécessaire à la fermeture des contacts principaux est fourni par un électro-aimant
[IEC 60947-4-1, ed. 3.0 (2009-09)]Магнитные пускатели переменного тока предназначены в основном для дистанционного управления асинхронными электродвигателями. Осуществляют также нулевую защиту, т. е. при исчезновении напряжения или его снижении на 40-60 % от номинального магнитная система отпадает и главные контакты размыкаются. В комплекте с тепловым реле пускатели выполняют также защиту электродвигателей от перегрузок и от токов, возникающих при обрыве одной из фаз.
Пускатели выпускаются в открытом, защищенном и пылебрызгонепроницаемом исполнениях, с тепловыми реле и без них, бывают реверсивными и нереверсивными.
Устройство пускателя серии ПМЕ
Внутри корпуса пускателя размещена электромагнитная система, включающая в себя неподвижную Ш-образную часть сердечника 7 и обмотку 6, намотанную на катушку. Сердечник набран из изолированных друг от друга (для уменьшения потерь от вихревых токов) листов электротехнической стали. Подвижная часть сердечника 5 (якорь) соединена с пластмассовой траверсой 4, на которой смонтированы контактные мостики 2 с подвижными контактами. Плавность замыкания контактов и необходимое усилие нажатия обеспечиваются контактными пружинами 1. Неподвижные контакты припаяны к контактным пластинам 3, снабженным винтовыми зажимами для присоединения проводов внешней цепи. Кроме главных контактов, пускатели имеют дополнительные (блокировочные) контакты 8, расположенные на боковых поверхностях аппарата. Главные контакты закрыты крышкой, защищающей их от загрязнения, случайных прикосновений и междуфазных замыканий.
[ http://www.electromonter.info/handbook/magnetic_starter.html]
Пускатели электромагнитные типа ПМ12-125
Пускатели электромагнитные типа ПМ12-125 предназначены для применения главным образом в стационарных установках для дистанционного пуска непосредственным подключением к сети, останова и реверсирования трехфазных асинхронных электродвигателей с короткозамкнутым ротором при напряжении до 660 В переменного тока частотой 50 или 60 Гц.
Для ограничения коммутационных перенапряжений, возникающих при отключении пускателей на катушках управления, могут устанавливаться ограничители перенапряжений (ОПН). Пускатели, комплектуемые ОПН, пригодны для работы в системах управления с применением микропроцессорной техники
[ http://www.kzeap.ru/katalog/k022.pdf]Тематики
Синонимы
EN
- automatic tripping contactor
- electromagnetic starter
- M/S
- magnetic starter
- magnetic switch
- motor contactor
- solenoid starter
DE
FR
Англо-русский словарь нормативно-технической терминологии > electromagnetic starter
-
10 magnetic starter
электромагнитный пускатель
Пускатель, у которого сила, необходимая для замыкания главных контактов, обеспечивается электромагнитом.
[ ГОСТ Р 50030.4.1-2002 (МЭК 60947-4-1-2000)]
пускатель магнитный
Электрический выключатель переменного тока с магнитным приводом, предназначенный, главным образом, для дистанционного пуска, остановки и защиты трёхфазных асинхронных электродвигателей с короткозамкнутым ротором
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]
магнитный пускатель
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]EN
electromagnetic starter
starter in which the force for closing the main contacts is provided by an electromagnet
[IEC 60947-4-1, ed. 3.0 (2009-09)]FR
démarreur électromagnétique
démarreur pour lequel l'effort nécessaire à la fermeture des contacts principaux est fourni par un électro-aimant
[IEC 60947-4-1, ed. 3.0 (2009-09)]Магнитные пускатели переменного тока предназначены в основном для дистанционного управления асинхронными электродвигателями. Осуществляют также нулевую защиту, т. е. при исчезновении напряжения или его снижении на 40-60 % от номинального магнитная система отпадает и главные контакты размыкаются. В комплекте с тепловым реле пускатели выполняют также защиту электродвигателей от перегрузок и от токов, возникающих при обрыве одной из фаз.
Пускатели выпускаются в открытом, защищенном и пылебрызгонепроницаемом исполнениях, с тепловыми реле и без них, бывают реверсивными и нереверсивными.
Устройство пускателя серии ПМЕ
Внутри корпуса пускателя размещена электромагнитная система, включающая в себя неподвижную Ш-образную часть сердечника 7 и обмотку 6, намотанную на катушку. Сердечник набран из изолированных друг от друга (для уменьшения потерь от вихревых токов) листов электротехнической стали. Подвижная часть сердечника 5 (якорь) соединена с пластмассовой траверсой 4, на которой смонтированы контактные мостики 2 с подвижными контактами. Плавность замыкания контактов и необходимое усилие нажатия обеспечиваются контактными пружинами 1. Неподвижные контакты припаяны к контактным пластинам 3, снабженным винтовыми зажимами для присоединения проводов внешней цепи. Кроме главных контактов, пускатели имеют дополнительные (блокировочные) контакты 8, расположенные на боковых поверхностях аппарата. Главные контакты закрыты крышкой, защищающей их от загрязнения, случайных прикосновений и междуфазных замыканий.
[ http://www.electromonter.info/handbook/magnetic_starter.html]
Пускатели электромагнитные типа ПМ12-125
Пускатели электромагнитные типа ПМ12-125 предназначены для применения главным образом в стационарных установках для дистанционного пуска непосредственным подключением к сети, останова и реверсирования трехфазных асинхронных электродвигателей с короткозамкнутым ротором при напряжении до 660 В переменного тока частотой 50 или 60 Гц.
Для ограничения коммутационных перенапряжений, возникающих при отключении пускателей на катушках управления, могут устанавливаться ограничители перенапряжений (ОПН). Пускатели, комплектуемые ОПН, пригодны для работы в системах управления с применением микропроцессорной техники
[ http://www.kzeap.ru/katalog/k022.pdf]Тематики
Синонимы
EN
- automatic tripping contactor
- electromagnetic starter
- M/S
- magnetic starter
- magnetic switch
- motor contactor
- solenoid starter
DE
FR
Англо-русский словарь нормативно-технической терминологии > magnetic starter
-
11 magnetic switch
электромагнитный пускатель
Пускатель, у которого сила, необходимая для замыкания главных контактов, обеспечивается электромагнитом.
[ ГОСТ Р 50030.4.1-2002 (МЭК 60947-4-1-2000)]
пускатель магнитный
Электрический выключатель переменного тока с магнитным приводом, предназначенный, главным образом, для дистанционного пуска, остановки и защиты трёхфазных асинхронных электродвигателей с короткозамкнутым ротором
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]
магнитный пускатель
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]EN
electromagnetic starter
starter in which the force for closing the main contacts is provided by an electromagnet
[IEC 60947-4-1, ed. 3.0 (2009-09)]FR
démarreur électromagnétique
démarreur pour lequel l'effort nécessaire à la fermeture des contacts principaux est fourni par un électro-aimant
[IEC 60947-4-1, ed. 3.0 (2009-09)]Магнитные пускатели переменного тока предназначены в основном для дистанционного управления асинхронными электродвигателями. Осуществляют также нулевую защиту, т. е. при исчезновении напряжения или его снижении на 40-60 % от номинального магнитная система отпадает и главные контакты размыкаются. В комплекте с тепловым реле пускатели выполняют также защиту электродвигателей от перегрузок и от токов, возникающих при обрыве одной из фаз.
Пускатели выпускаются в открытом, защищенном и пылебрызгонепроницаемом исполнениях, с тепловыми реле и без них, бывают реверсивными и нереверсивными.
Устройство пускателя серии ПМЕ
Внутри корпуса пускателя размещена электромагнитная система, включающая в себя неподвижную Ш-образную часть сердечника 7 и обмотку 6, намотанную на катушку. Сердечник набран из изолированных друг от друга (для уменьшения потерь от вихревых токов) листов электротехнической стали. Подвижная часть сердечника 5 (якорь) соединена с пластмассовой траверсой 4, на которой смонтированы контактные мостики 2 с подвижными контактами. Плавность замыкания контактов и необходимое усилие нажатия обеспечиваются контактными пружинами 1. Неподвижные контакты припаяны к контактным пластинам 3, снабженным винтовыми зажимами для присоединения проводов внешней цепи. Кроме главных контактов, пускатели имеют дополнительные (блокировочные) контакты 8, расположенные на боковых поверхностях аппарата. Главные контакты закрыты крышкой, защищающей их от загрязнения, случайных прикосновений и междуфазных замыканий.
[ http://www.electromonter.info/handbook/magnetic_starter.html]
Пускатели электромагнитные типа ПМ12-125
Пускатели электромагнитные типа ПМ12-125 предназначены для применения главным образом в стационарных установках для дистанционного пуска непосредственным подключением к сети, останова и реверсирования трехфазных асинхронных электродвигателей с короткозамкнутым ротором при напряжении до 660 В переменного тока частотой 50 или 60 Гц.
Для ограничения коммутационных перенапряжений, возникающих при отключении пускателей на катушках управления, могут устанавливаться ограничители перенапряжений (ОПН). Пускатели, комплектуемые ОПН, пригодны для работы в системах управления с применением микропроцессорной техники
[ http://www.kzeap.ru/katalog/k022.pdf]Тематики
Синонимы
EN
- automatic tripping contactor
- electromagnetic starter
- M/S
- magnetic starter
- magnetic switch
- motor contactor
- solenoid starter
DE
FR
Англо-русский словарь нормативно-технической терминологии > magnetic switch
-
12 motor contactor
электромагнитный пускатель
Пускатель, у которого сила, необходимая для замыкания главных контактов, обеспечивается электромагнитом.
[ ГОСТ Р 50030.4.1-2002 (МЭК 60947-4-1-2000)]
пускатель магнитный
Электрический выключатель переменного тока с магнитным приводом, предназначенный, главным образом, для дистанционного пуска, остановки и защиты трёхфазных асинхронных электродвигателей с короткозамкнутым ротором
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]
магнитный пускатель
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]EN
electromagnetic starter
starter in which the force for closing the main contacts is provided by an electromagnet
[IEC 60947-4-1, ed. 3.0 (2009-09)]FR
démarreur électromagnétique
démarreur pour lequel l'effort nécessaire à la fermeture des contacts principaux est fourni par un électro-aimant
[IEC 60947-4-1, ed. 3.0 (2009-09)]Магнитные пускатели переменного тока предназначены в основном для дистанционного управления асинхронными электродвигателями. Осуществляют также нулевую защиту, т. е. при исчезновении напряжения или его снижении на 40-60 % от номинального магнитная система отпадает и главные контакты размыкаются. В комплекте с тепловым реле пускатели выполняют также защиту электродвигателей от перегрузок и от токов, возникающих при обрыве одной из фаз.
Пускатели выпускаются в открытом, защищенном и пылебрызгонепроницаемом исполнениях, с тепловыми реле и без них, бывают реверсивными и нереверсивными.
Устройство пускателя серии ПМЕ
Внутри корпуса пускателя размещена электромагнитная система, включающая в себя неподвижную Ш-образную часть сердечника 7 и обмотку 6, намотанную на катушку. Сердечник набран из изолированных друг от друга (для уменьшения потерь от вихревых токов) листов электротехнической стали. Подвижная часть сердечника 5 (якорь) соединена с пластмассовой траверсой 4, на которой смонтированы контактные мостики 2 с подвижными контактами. Плавность замыкания контактов и необходимое усилие нажатия обеспечиваются контактными пружинами 1. Неподвижные контакты припаяны к контактным пластинам 3, снабженным винтовыми зажимами для присоединения проводов внешней цепи. Кроме главных контактов, пускатели имеют дополнительные (блокировочные) контакты 8, расположенные на боковых поверхностях аппарата. Главные контакты закрыты крышкой, защищающей их от загрязнения, случайных прикосновений и междуфазных замыканий.
[ http://www.electromonter.info/handbook/magnetic_starter.html]
Пускатели электромагнитные типа ПМ12-125
Пускатели электромагнитные типа ПМ12-125 предназначены для применения главным образом в стационарных установках для дистанционного пуска непосредственным подключением к сети, останова и реверсирования трехфазных асинхронных электродвигателей с короткозамкнутым ротором при напряжении до 660 В переменного тока частотой 50 или 60 Гц.
Для ограничения коммутационных перенапряжений, возникающих при отключении пускателей на катушках управления, могут устанавливаться ограничители перенапряжений (ОПН). Пускатели, комплектуемые ОПН, пригодны для работы в системах управления с применением микропроцессорной техники
[ http://www.kzeap.ru/katalog/k022.pdf]Тематики
Синонимы
EN
- automatic tripping contactor
- electromagnetic starter
- M/S
- magnetic starter
- magnetic switch
- motor contactor
- solenoid starter
DE
FR
Англо-русский словарь нормативно-технической терминологии > motor contactor
-
13 solenoid starter
электромагнитный пускатель
Пускатель, у которого сила, необходимая для замыкания главных контактов, обеспечивается электромагнитом.
[ ГОСТ Р 50030.4.1-2002 (МЭК 60947-4-1-2000)]
пускатель магнитный
Электрический выключатель переменного тока с магнитным приводом, предназначенный, главным образом, для дистанционного пуска, остановки и защиты трёхфазных асинхронных электродвигателей с короткозамкнутым ротором
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]
магнитный пускатель
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]EN
electromagnetic starter
starter in which the force for closing the main contacts is provided by an electromagnet
[IEC 60947-4-1, ed. 3.0 (2009-09)]FR
démarreur électromagnétique
démarreur pour lequel l'effort nécessaire à la fermeture des contacts principaux est fourni par un électro-aimant
[IEC 60947-4-1, ed. 3.0 (2009-09)]Магнитные пускатели переменного тока предназначены в основном для дистанционного управления асинхронными электродвигателями. Осуществляют также нулевую защиту, т. е. при исчезновении напряжения или его снижении на 40-60 % от номинального магнитная система отпадает и главные контакты размыкаются. В комплекте с тепловым реле пускатели выполняют также защиту электродвигателей от перегрузок и от токов, возникающих при обрыве одной из фаз.
Пускатели выпускаются в открытом, защищенном и пылебрызгонепроницаемом исполнениях, с тепловыми реле и без них, бывают реверсивными и нереверсивными.
Устройство пускателя серии ПМЕ
Внутри корпуса пускателя размещена электромагнитная система, включающая в себя неподвижную Ш-образную часть сердечника 7 и обмотку 6, намотанную на катушку. Сердечник набран из изолированных друг от друга (для уменьшения потерь от вихревых токов) листов электротехнической стали. Подвижная часть сердечника 5 (якорь) соединена с пластмассовой траверсой 4, на которой смонтированы контактные мостики 2 с подвижными контактами. Плавность замыкания контактов и необходимое усилие нажатия обеспечиваются контактными пружинами 1. Неподвижные контакты припаяны к контактным пластинам 3, снабженным винтовыми зажимами для присоединения проводов внешней цепи. Кроме главных контактов, пускатели имеют дополнительные (блокировочные) контакты 8, расположенные на боковых поверхностях аппарата. Главные контакты закрыты крышкой, защищающей их от загрязнения, случайных прикосновений и междуфазных замыканий.
[ http://www.electromonter.info/handbook/magnetic_starter.html]
Пускатели электромагнитные типа ПМ12-125
Пускатели электромагнитные типа ПМ12-125 предназначены для применения главным образом в стационарных установках для дистанционного пуска непосредственным подключением к сети, останова и реверсирования трехфазных асинхронных электродвигателей с короткозамкнутым ротором при напряжении до 660 В переменного тока частотой 50 или 60 Гц.
Для ограничения коммутационных перенапряжений, возникающих при отключении пускателей на катушках управления, могут устанавливаться ограничители перенапряжений (ОПН). Пускатели, комплектуемые ОПН, пригодны для работы в системах управления с применением микропроцессорной техники
[ http://www.kzeap.ru/katalog/k022.pdf]Тематики
Синонимы
EN
- automatic tripping contactor
- electromagnetic starter
- M/S
- magnetic starter
- magnetic switch
- motor contactor
- solenoid starter
DE
FR
Англо-русский словарь нормативно-технической терминологии > solenoid starter
-
14 tar
- формат файла архива
- покрывать дёгтем
- отчёт по анализу результатов испытаний
- обращение с просьбой об оказании технической помощи
- деготь
деготь
Жидкий продукт сухой перегонки тв. топлив — камен. и бурых углей, сланцев, древесины, торфа. Консистенция д. - от легкоподвижной жидкости до труднотекучей массы, от темно-коричн. до почти черной. Д. - сложная смесь органич. вещ-в: углеводородов разных классов, фенолов, органич. кислот и др.
При сухой перегонке угля, торфа и т.п. при 500—600 °С - полукоксовании образуется т. н. первичный деготь. При коксовании камен. углей получ. каменноугольная смола.
[ http://metaltrade.ru/abc/a.htm]Тематики
EN
дёготь
Продукт сухой перегонки твёрдого топлива: каменных и бурых углей, сланцев, древесины, торфа
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]EN
DE
FR
обращение с просьбой об оказании технической помощи
(напр. в рамках программы TACIS)
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
отчёт по анализу результатов испытаний
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
покрывать дёгтем
пропитывать дёгтем
смолить
—
[ http://slovarionline.ru/anglo_russkiy_slovar_neftegazovoy_promyishlennosti/]Тематики
Синонимы
EN
формат файла архива
архивировать в tar-архив
От англ. tape archive. Формат битового потока или файла архива, а также название традиционной для Unix программы для работы с такими архивами.
Первоначально программа tar использовалась для создания архивов на магнитной ленте, а в настоящее время tar используется для хранения нескольких файлов внутри одного файла, для распространения программного обеспечения, а также по прямому назначению — для создания архива файловой системы. Одним из преимуществ формата tar при создании архивов является то, что в архив записывается информация о структуре каталогов, о владельце и группе отдельных файлов, а также временные метки файлов. [Ист: Википедия]
[ http://www.morepc.ru/dict/]Тематики
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > tar
-
15 power line
- силовая цепь
- питающая электрическая сеть
- передаточная тяга от группового привода
- линия электроснабжения
- линия электропитания
- линия электропередачи
линия электропередачи
Электрическая линия, выходящая за пределы электростанции или подстанции и предназначенная для передачи электрической энергии на расстояние.
[ ГОСТ 19431-84]
линия электропередачи
Электроустановка, состоящая из проводов, кабелей, изолирующих элементов и несущих конструкций, предназначенная для передачи электрической энергии между двумя пунктами энергосистемы с возможным промежуточным отбором по ГОСТ 19431
[ ГОСТ 24291-90]
линия электропередачи
Электроустановка для передачи на расстояние электрической энергии, состоящая из проводников тока - проводов, кабелей, а также вспомогательных устройств и конструкций
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]
<> линия передачи (в электроэнергетических системах)
-
[IEV number 151-12-31]
линия электропередачи (ЛЭП)
Сооружение, состоящее из проводов и вспомогательных устройств, предназначенное для передачи или распределения электрической энергии.
[БСЭ]EN
electric line
an arrangement of conductors, insulating materials and accessories for transferring electricity between two points of a system
[IEV ref 601-03-03]
transmission line (in electric power systems)
line for transfer of electric energy in bulk
Source: 466-01-13 MOD
[IEV number 151-12-31]FR
ligne électrique
ensemble constitué de conducteurs, d'isolants et d'accessoires destiné au transfert d'énergie électrique d'un point à un autre d'un réseau
[IEV ref 601-03-03]
ligne de transport, f
ligne destinée à un transfert massif d'énergie électrique
Source: 466-01-13 MOD
[IEV number 151-12-31]Параллельные тексты EN-RU
Most transmission lines operate with three-phase alternating current (ac).
Большинство линий электропередачи являются трехфазными и передают энергию на переменном токе.
[Перевод Интент]Линии электропередачи называются совокупность сооружений, служащих для передачи электроэнергии от электростанции до потребителей. К ним относятся электроприемники, понижающие и повышающие электростанции и подстанции, также они являются составом электрической сети.
Линии электропередачи бывают как воздушными, так и кабельными. Для кабельных характерно напряжение до 35кВ, а для воздушных до 750 кВ. В зависимости от того какую мощность передаёт ЛЭП могут быть Межсистемными и Распределительными. Межсистемные соединяющие крупные электрические системы для транспортировки больших потоков мощности на большие расстояния.
Распределительные служат для передачи электроэнергии в самой электрической системе при низких напряжениях. Правилами устройства электроустановок и СНиПами определяются параметры Линий электропередач и её элементы. Значение тока, величину напряжения, количество цепей, из какого материала должны состоять опоры, сечение и конструкция проводов относят к основным характеристикам ЛЭП.
Для переменного тока существуют табличные значения напряжения: 2 кВ., 3 кВ., 6 кВ., 10 кВ., 20 кВ., 35 кВ., 220 кВ., 330 кВ., 500 кВ.,750 кВ.
Воздушные линии электрических сетей (ВЛ) это линии которые находятся на воздухе и используются для транспортировки электроэнергии на большие территории по проводам. Соединительные провода, грозозащитные троса, опоры(железобетонные, металлические), изоляторы(фарфоровые, стеклянные) служат построения воздушных линий.
Классификация воздушных линий-
По роду тока:
- ВЛ переменного тока,
- ВЛ постоянного тока.
В большинстве случаев, ВЛ служат для транспортировки переменного тока лишь иногда в особых случаях применяются линии постоянного тока (например, для питание контактной сети или связи энергосистем). Ёмкостные и индуктивные потери у линии постоянного тока меньше чем у линий переменного тока. Всё же большого распространения такие линии не получили.
-
По назначению
-
Сверхдальние ВЛ
предназначены для соединения отдельных энергосистем номиналом 500 кВ и выше -
Магистральные ВЛ
предназначены для транспортировки энергии от крупных электростанций, и для соединения энергосистем друг с другом, и соединения электростанций внутри энергосистем номиналом 220 и 330 кВ -
Распределительные ВЛ
служат для снабжения предприятий и потребителей крупных районов и для соединения пунктов распределения электроэнергии с потребителями классом напряжения 35, 110 и 150 кВ ВЛ 20 кВ и ниже, передающие энергию к потребителям.
-
Сверхдальние ВЛ
-
По напряжению
- Воздушные Линии до 1к В (ВЛ низкого класса напряжений)
- Воздушные Линии больше 1 кВ
- Воздушные Линии 1–35 кВ (ВЛ среднего класса напряжений)
- Воздушные Линии 110–220 кВ (ВЛ высокого класса напряжений)
- Воздушные Линии 330–750 кВ (ВЛ сверхвысокого класса напряжений)
-
Воздушные Линии больше 750 кВ (ВЛ ультравысокого класса напряжений)
-
По режиму работы нейтралей
-
Сети трёхфазные с изолированными (незаземлёнными) нейтралями
т.е. нейтраль не присоединена к устройству заземленному или присоединена через прибор с высоким сопротивлением к нему. У нас такой режим нейтрали применяется в электросетях напряжением 3—35 кВ с низкими токами однофазных заземлений. - Трёхфазные сети с резонансно-заземлёнными (компенсированными) нейтральная шина соединена с заземлением через индуктивность. Обычно используется в сетях с высокими токами однофазных заземлений напряжением 3–35 кВ
- Трёхфазные сети с эффективно-заземлёнными нейтралями это сети высокого и сверхвысокого напряжения, нейтрали которых заземлены через маленькое активное сопротивление или напрямую. В таких сетях применяются трансформаторы напряжением 110 или 150 и иногда 220 кВ,
- Сети с глухозаземлённой нейтралью это когда нейтраль трансформатора или генератора заземляется через малое сопротивление или напрямую. Эти сети имеют напряжение менее 1 кВ, или сети 220 кВ и больше.
-
Сети трёхфазные с изолированными (незаземлёнными) нейтралями
-
По режиму работы в зависимости от состояния сети
- Воздушные Линии нормального режима работы (опоры целы провода, троса не оборваны)
- Воздушные Линии аварийного режима работы (при разрыве проводов и тросов)
- Воздушные Линии монтажного режима работы (во время монтажа или демонтажа опор, проводов и тросов)
Кабельная линия электропередачи (КЛ) — это линия которая служит для транспортировки электроэнергии, в неё входит один или несколько кабелей (проложенных параллельно) которые соединяются соединительными муфтами и заканчиваются при помощи стопорных и концевых муфт (заделками) и деталей для крепления, а для линий использующие масло, кроме того, с подпитывающими приборами и датчиком давления масла.
Кабельные лини можно разделить на 3 класса в зависимости от прокладки кабеля:
- воздушные,
- подземные
- подводные.
кабельные линии протянутые воздушным способом это линии в которых кабель цепляют стальным тросом на опорах, стойках, кронштейнах.
Подземные кабельные линии — кабель прокладываемый в кабельных траншее, тоннелях, коллекторах.
Подводные кабельные линии это линии в которых кабель проходит через водную преграду по её дну.[ Источник]
Тематики
Синонимы
EN
- electric line
- electric power line
- electric power transmission line
- power line
- power transmission line
- transmission line
DE
FR
линия электропитания
-
[Интент]Оборудование связи может быть подвергнуто воздействию электромагнитных помех различных видов, наводимых линиями электропитания, сигнальными линиями или непосредственно излучаемых окружающей средой.
[ ГОСТ Р 54835-2011/IEC/TR 61850-1:2003]Подготовка производства монтажных работ включает в себя: изучение проектно-сметной документации или материалов актов обследования; подготовку необходимых строительных работ на объекте; монтаж слаботочных электрических соединительных линий постоянного тока; монтаж силовых линий электропитания;...
[ ГОСТ Р 53704-2009]Тематики
- электротехника, основные понятия
EN
линия электроснабжения
питающая линия
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
Синонимы
EN
передаточная тяга от группового привода
—
[ http://slovarionline.ru/anglo_russkiy_slovar_neftegazovoy_promyishlennosti/]Тематики
EN
питающая электрическая сеть (1)
Трехфазная распределительная электрическая сеть с глухозаземленной нейтралью, обеспечивающая подвод питания к ВРУ от внешнего источника
[ ГОСТ Р 51732-2001]
питающая сеть (1)
Сеть от распределительного устройства подстанции или ответвления от воздушных линий электропередачи до ВУ, ВРУ, ГРЩ
[ПУЭ]
сеть электрическая питающая (1)
Электрическая сеть от подстанции или ответвления от распределительных пунктов до вводных устройств, а также от вводных устройств до щитов (пунктов или щитков)
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]
питающая электрическая сеть (2)
Питающей сетью называют электрическую сеть (линию), подводящую электроэнергию к распределительным пунктам или подстанциям.
[ http://www.eti.su/articles/over/over_690.html]
питающая электрическая сеть (2)
Питающие сети предназначены для передачи электрической энергии от системообразующей сети и частично от шин 110-220 кВ электрических станций к центрам питания (ЦП) распределительных сетей – районным ПС.
Питающие сети обычно замкнутые. Напряжение этих сетей ранее было 110-220 кВ. По мере роста нагрузок, мощности электрических станций и протяженности электрических сетей увеличивается напряжением сетей. В последнее время напряжение питающих сетей иногда бывает 330-500 кВ. Сети 110-220 кВ обычно административно подчиняются РЭУ. Их режимом управляет диспетчер РЭУ.
[ http://esis-kgeu.ru/piree/178-piree]1.2 Стандарт распространяется на ВРУ, присоединяемые к питающим электрическим сетям напряжением 380/220 В переменного тока частотой 50—60 Гц с глухозаземленной нейтралью.
[ ГОСТ Р 51732-2001]
5.1.4 Электроприводы должны обеспечивать нормальную безаварийную работу с сохранением номинальной мощности при:
- отклонениях напряжения питающей сети от номинального значения до ±10 %;
- отклонениях напряжения питания внутренних систем от +10 до -15 %;
- отклонениях частоты питающей сети до ±2,5 %,
....
Проверка работы при отклонении параметров питающей сети.
[ ГОСТ Р 51137-98]
5.1. Питание энергоемких предприятий от сетей энергосистемы следует осуществлять на напряжении 110, 220 или 380 кВ. Выбор напряжения питающей сети зависит от потребляемой предприятием мощности и от напряжения сетей энергосистемы в данном районе.
...
6.1.10.... Выбор схем питающей сети (магистральные или радиальные) и их конструктивного исполнения (воздушные или кабельные) питающих линий 110-220 кВ определяется технико-экономическими сопоставлениями с учетом генплана и особенностей данного предприятия, взаимного расположения районных подстанций и пунктов ввода, ожидаемой перспективы развития существующей схемы электроснабжения, степени загрязнения атмосферы.
6.5.1. Электрические сети напряжением до 1 кВ переменного тока на промышленных предприятиях подразделяются на питающие сети до 1 кВ (от цеховых ТП до распределительных устройств до 1 кВ) и распределительные сети до 1 кВ (от РУ до 1 кВ до электроприемников).
6.5.2. Питающие силовые сети до 1 кВ прокладываются как внутри зданий и сооружений, так и вне их.
6.5.3. Внутрицеховые питающие силовые сети могут выполняться как магистральными, так и радиальными. Выбор вида сети зависит от планировки технологического оборудования, требований по бесперебойности электроснабжения, условий окружающей среды, вероятности изменения технологического процесса, вызывающего замену технологического оборудования, размещения цеховых ТП. Каждый вид прокладки имеет свою предпочтительную область применения.
[ПРОЕКТИРОВАНИЕ ЭЛЕКТРОСНАБЖЕНИЯ ПРОМЫШЛЕННЫХ ПРЕДПРИЯТИЙ. Нормы технологического проектирования. НТП ЭПП-94]
Тематики
Классификация
>>>Синонимы
EN
- electrical supply network
- feeder line
- mains
- mains supply
- power line
- power system
- supply main
- supply net
- supply network
- transmission network (2)
- utility company
- utility line
- utility supply
DE
FR
силовая цепь
Цепь, передающая энергию от сети к элементам оборудования, используемым для выполнения производственных операций, а также к трансформаторам, питающим цепи управления.
[ГОСТ ЕН 1070-2003]
силовая цепь
Цепь, передающая энергию от сети к элементам оборудования, используемым непосредственно для выполнения производственных операций, а также к трансформаторам, питающим цепи управления.
[ ГОСТ Р МЭК 60204-1-2007]
силовая электрическая цепь
Электрическая цепь, содержащая элементы, функциональное назначение которых состоит в производстве или передаче основной части электрической энергии, ее распределении, преобразовании в другой вид энергии или в электрическую энергию с другими значениями параметров.
[ ГОСТ 18311-80]EN
power circuit
circuit that supplies power from the supply network to units of equipment used for productive operation and to transformers supplying control circuits
[IEC 60204-32, ed. 2.0 (2008-03)]FR
circuit de puissance
circuit qui transmet l'énergie du réseau aux éléments d'équipement utilisés directement pour le travail effectué par la machine et aux transformateurs alimentant les circuits de commande
[IEC 60204-32, ed. 2.0 (2008-03)]
1 - Силовая цепь электродвигателя
2 - Цепь управления электродвигателемLS Tri-MEC vacuum contactors are mainly used for the switching of motors, transformers, capacitors in AC power lines.
[LS Industrial Systems]Вакуумные контакторы LS Tri-MEC предназначены в основном для коммутации силовых цепей переменного тока электродвигателей, трансформаторов, конденсаторов.
[Перевод Интент]Тематики
Синонимы
EN
DE
FR
Англо-русский словарь нормативно-технической терминологии > power line
-
16 plc
- связь по ЛЭП
- программируемый логический контроллер
- несущая в канале ВЧ-связи по ЛЭП
- маскирование потери пакета
- контроллер с программируемой логикой
- акционерная компания с ограниченной ответственностью
акционерная компания с ограниченной ответственностью
AG - аббревиатура для обозначения AKTIENGESELLSCHAFT (акционерное общество). Оно пишется после названия немецких, австрийских или швейцарских компаний и является эквивалентом английской аббревиатуры plc (public limited company-акционерная компания с ограниченной ответственностью). Сравни: GmbH.
[ http://www.vocable.ru/dictionary/533/symbol/97]Тематики
EN
DE
- AG
контроллер с программируемой логикой
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
маскирование потери пакета
Метод сокрытия факта потери медиапакетов путем генерирования синтезируемых пакетов (МСЭ-T G.1050).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
несущая в канале ВЧ-связи по ЛЭП
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999]Тематики
- электротехника, основные понятия
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего. Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы. Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7. Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series. Рис. 4. Резервированный контроллер FCP270.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA). Рис. 5. Контроллер AC800M.
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
связь по ЛЭП
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
Англо-русский словарь нормативно-технической терминологии > plc
17 automate programmable à mémoire
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Франко-русский словарь нормативно-технической терминологии > automate programmable à mémoire
18 speicherprogrammierbare Steuerung, f
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Немецко-русский словарь нормативно-технической терминологии > speicherprogrammierbare Steuerung, f
19 programmable logic controller
контроллер с программируемой логикой
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > programmable logic controller
20 programmable controller
программируемый контроллер
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > programmable controller
СтраницыСм. также в других словарях:
СССР. Естественные науки — Математика Научные исследования в области математики начали проводиться в России с 18 в., когда членами Петербургской АН стали Л. Эйлер, Д. Бернулли и другие западноевропейские учёные. По замыслу Петра I академики иностранцы… … Большая советская энциклопедия
СССР. Общественные науки — Философия Будучи неотъемлемой составной частью мировой философии, философская мысль народов СССР прошла большой и сложный исторический путь. В духовной жизни первобытных и раннефеодальных обществ на землях предков современных… … Большая советская энциклопедия
СССР. Внешняя политика — Внешняя политика СССР Основные принципы советской внешней политики Великая Октябрьская социалистическая революция 1917 создала государство нового типа ‒ советское социалистическое государство ‒ и тем положила начало советской внешней политике,… … Большая советская энциклопедия
СССР. Внутренняя торговля и бытовое обслуживание — Внутренняя торговля Внутренняя торговля играет большую роль в повышении жизненного уровня населения СССР. Её развитие характеризуется высокими и устойчивыми темпами, соответствующими росту доходов и платёжеспособного спроса… … Большая советская энциклопедия
СССР. Внешняя политика СССР — Основные принципы советской внешней политики Великая Октябрьская социалистическая революция 1917 создала государство нового типа советское социалистическое государство и тем положила начало советской внешней политике,… … Большая советская энциклопедия
СССР. ИСТОРИЯ — Февральская революция. Военные поражения на фронтах Первой мировой войны и нараставший экономический хаос вызвали общественные волнения. В феврале 1917 хлебные бунты в столице привели к всеобщей забастовке, результатом которой стало отречение… … Энциклопедия Кольера
СССР. Коммунистическая партия Советского Союза — (КПСС) КПСС основана В. И. Лениным как революционная марксистская партия российского пролетариата; оставаясь партией рабочего класса, КПСС в результате победы социализма в СССР и укрепления социального и идейно политического единства… … Большая советская энциклопедия
СССР — бывшее крупнейшее государство мира по площади, второе по экономической и военной мощи и третье по численности населения. СССР был создан 30 декабря 1922, когда Российская Советская Федеративная Социалистическая Республика (РСФСР) объединилась с… … Энциклопедия Кольера
СССР. Радиовещание и телевидение — Советское телевидение и радиовещание, так же, как и другие средства массовой информации и пропаганды, оказывают большое влияние на всю общественную жизнь страны, играют существенную роль в формировании коммунистического мировоззрения… … Большая советская энциклопедия
СССР. Труд — Характер и особенности труда. Победа Октябрьской революции 1917 и утверждение социалистических производственных отношений вызвали коренное изменение в характере труда. Уничтожение классов и социальных групп, присваивающих результаты… … Большая советская энциклопедия
СССР. Капиталистический строй — Падение крепостного права. Падение крепостного права, оформленное правительственными актами 19 февраля 1861 рубеж смены в России феодально крепостнической формации капиталистической. Главным фактором, сделавшим отмену крепостного права… … Большая советская энциклопедия
 18+© Академик, 2000-2024
18+© Академик, 2000-2024- Обратная связь: Техподдержка, Реклама на сайте
Экспорт словарей на сайты, сделанные на PHP, Joomla, Drupal, WordPress, MODx.
Перевод: со всех языков на русский
с русского на все языки- С русского на:
- Все языки
- Со всех языков на:
- Все языки
- Английский
- Немецкий
- Русский
- Французский