-
41 stochastic oscillator
бирж., стат. стохастический осциллятор (изобретен Д. Лейном в 1950-х, самый популярный индикатор в техническом анализе, представляет из себя кривую, колеблющуюся в диапазоне от 0 до 100; предполагается, если индикатор поднимается выше 70 пунктов или опускается ниже 30 пунктов, то котировки акций находятся вне состояния равновесия; сигналами к покупке служит пересечение индикатором снизу вверх уровня в 30 пунктов, к продаже - пересечение индикатором сверху вниз уровня в 70 пунктов)See:The new English-Russian dictionary of financial markets > stochastic oscillator
-
42 cue-reversal point
точка поворота сигнала (точка в диапазоне от 0 до 1 мсек, ниже которой увеличение интерауральной задержки заставляет бинауральный образ сдвигаться вбок. Выше этой точки увеличение задержки вызывает возвращение к центру)Англо-русский словарь промышленной и научной лексики > cue-reversal point
-
43 скорость
speed
в механике - одна из основных характеристик движения материальной точки. — rate of motion. speed and velocity are often used interchangeably although some authorities maintain that velocity should be used only for the vector quantity.
- (вектор) (рис.124) — velocity (vel)
величина скорости в данном направлении, — а vector quantity equal to speed in a given direction.
- (темп изменения величины) — rate
- аварийного слива топлива (в воздухе) — fuel dumping /jettison/ rate. jettison rate for all tanks and all boost pumps operating is... kg per minute.
- аварийного слива топлива (производительность слива) порядка 2000 л/мин — fuel dump rate of 2000 liters per minute
- азимутальной коррекции (гироскопа) — azimuth erection rate
-, безопасная — safety speed
- бокового движения (вертолета) — sideward flight speed
- бокового перемещения (скольжения) — lateral velocity
скорость относительно невозмущенного воздуха в направлении поперечной оси. — the velocity relative to the undisturbed air in the direction of the lateral axis.
-, большая — high speed
-, большая (стеклоочистителя) — fast rate (fast)
"- велика" (надпись на указателе отклонения от заданной скорости прибора пкп) — fast
-, вертикальная — vertical speed
- вертикальная (для ссос) — descent /sink/ rate
-, вертикальная (при посадке) — descent velocity
with а limit descent velocity of... f.p.s. at the design landing weight...
- ветра (величина) — wind speed (ws)
скорость массы воздуха в горизонтальном направлении. — ws is horizontal velocity of а mass of air.
- ветра (величина и направление) (рис.124) — wind velocity
фактическая скорость ветра на высоте 50 фт. по сообщению) диспетчера. зафиксировать скорость и направление ветра. — the actual wind velocity at 50 foot height reported from the tower. record wind velocity and direction.
- ветра (название шкалы на графике) — wind
- ветра (сообщаемая диспетчерским пунктом или по метеосводке) — reported wind (speed)
- в зависимости от высоты и веса, вертикальная — vertical speed for altitude and weight
- взлета, безопасная (v2) — takeoff safety speed (v2)
скорость, достигаемая на первом этапе взлета, и выбираемая таким образом, чтобы обеспечить безопасное получение нормируемых градиентов набора высоты на втором этапе взлета. — the scheduled target speed to be attained at the 35 feet height with one engine inoperative.
- взлета, минимальная безопасная (v2 min) — minimum takeoff safety speed (v2 min)
наименьшая допустимая скорость на 1-м этапе взлета.
- взлета, минимально эволютивная (vmin эв) — air minimum control speed (v мса)
- в зоне ожидания — holding speed
- в момент отказа критического двигателя (при взлете) — critical engine failure speed (v1)
- в момент принятия решения (при взлете) — decision speed (v1)
-, воздушная — airspeed
скорость полета ла относительно воздуха, независимо от пути, пройденного относительно земной поверхности, — the rate of speed at which an aircraft is traveling through the atmosphere (air), and is independent of any distance covered on the surface of the earth.
- возникновения бафтинга — buffet (onset) speed
- возникновения бафтинга, предшествующего срыву — pre-stall buffet speed
- возникновения предупреждающей тряски (vтp) — pre-stall warning speed
скорость, при которой возникают заметные естественные или искусственно созданные признаки близости сваливания.
- возникновения флаттера — flutter (onset) speed
- восстановления (гироскопа) большая — fast erection rate
- вращения — rotational speed (n, n)
оборотов за единицу времени. — revolutions per unit time.
- вращения земли, угловая — earth('s) angular velocity
- вращения колеса (напр., при взлете) — tire speed. ; maximum takeoff weight restricted by tire speed
- в точке принятия решения — decision speed
- в точке принятия решения (при отказе критического двигателя) — critical engine failure speed
- встречного ветра — headwind speed
- встречного ветра (название шкалы на графике) — headwind
- в условиях турбулентности — rough air speed (vra)
- входа в зону турбулентности, заданная — target (air)speed for turbulent air penetration
-, выбранная заявителем — speed selected by the applicant
- выпуска (или уборки) шасси, максимальная — landing gear operating speed (vlo)
максимальная скорость полета, при которой разрешается выпускать или убирать шасси. — maximum speed at which it is safe to extend or retract the landing gear.
- выхода (гидросамолета, са молета-амфибии) на редан — hump speed. the speed at which the water resistance of a seaplane or amphibian is hignest.
- газового потока (через двиг.) — gas flow velocity
- герметизации кабины — cabin pressurization rate
-, гиперзвуковая — hypersonic speed
скорости от м-5 и выше. — pertaining to speeds of mach 5 or greater.
- горизонтального полета — level flight speed, speed in level flight
- горизонтального полета на максимальном продолжительном режиме (двиг.), максимальная — maximum speed in level flight with maximum continuous power
- горизонтального полета на расчетном режиме работы двигателей, максимальная — maximum speed in level flight with rated rpm and power
- движения назад (вертолета) — rearward (flight) speed
-, демонстрационная — demonstrated speed
- дисс (доплеровского измерителя скорости и сноса) — doppler velocity
- для определения характеристик устойчивости, максимальная — maximum speed for stability characteristic (vfc)
- горизонтального полета на режиме максимальной продолжительной мощности (тяги) — maximum speed in level flight with maximum continuous power (or thrust) (vh)
-, дозвуковая — subsonic speed
-, докритическая — pre-stall speed
-, допустимая — allowable speed
-, допустимая (ограниченная) — limiting speed
-, заданная воздушная — target airspeed
- заданная подвижным индексом — bug speed. fuel dumping may be necessary to reduce the bug speed.
- заправки топливом — fueling rate, fuel delivery rate
- захода на посадку (vзп) — approach speed (vapp)
- захода на посадку при всех работающих двигателях — approach speed with all engines operating
- захода на посадку при одном неработающем двигателе — approach speed with one engine inoperative
- захода на посадку с убранными закрылками — no flap approach speed
- захода на посадку с убранными закрылками и предкрылками — no flap-no slat approach speed. аn approach speed of 15 knots below no flap-no slat approach speeds can be used.
- захода на посадку с убранными предкрылками — no slat approach speed. with the leading edge slats extended, an approach speed of 15 knots below no flap - no slat approach speeds can be used.
-, звуковая — sonic speed
скорость ла или его части. равная скорости звука в данных условиях. — the speed of sound. when an object travels in air at the same speed as that of sound in the same medium.
-, земная индикаторная (v13) (из) — calibrated airspeed (cas)
- изменения (величины) — rate (of change)
- изменения бокового отклонения — crosstrack (distance) deviation rate, xtk deviation rate
- изменения шага (винта) — pitch-change rate
-, индикаторная воздушная — equivalnet airspeed (eas)
-, индикаторная земная (v13, из) (сша) — calibrated airspeed (cas)
равна показанию указателя скорости (приборной скорости) с учетом аэродинамической поправки (и инструментальной погрешности). напр., 150 км/ч из. — airspeed indicator reading, as installed in airplane, corrected for (static source) position (and instrument) error. cas is equal to the tas in standard atmosphere at sea level.
-, индикаторная земная (англ.) — rectified air speed (ras). ras is the indicated airspeed corrected for instrument and position errors.
- истечения выходящих газов (из реактивного сопла газотурбинного двигателя) — exhaust velocity, speed of ехhaust gases. the velocity of gaseous or other particles (exhaust stream) that exhaust through the nozzle.
-, истинная воздушная (ис) — true airspeed (tas)
скорость самолета относительно невозмущенного воздуха, равная скорости. — the speed of the airplane relative to undisturbed air.
-, истинная воздушная (по числу m) — true mach number (m)
показания указателя числа м c учетом аэродинамической поправки для приемника статического давления. — machmeter reading corrected for static source position error.
- касания (при посадке) — touch-down speed
- коррекции гироскопа — gyro erection rate
- коррекции гироскопа в азимуте — gyro azimuth erection rate
- коррекции гироскопа по крену и тангажу — gyro roll/pitch erection rate
- крейсерская — cruising speed
скорость полета, не превышающая 90 % расчетной скорости горизонтального полета. — а speed not greater than 90 % of the design level speed.
-, крейсерская расчетная — design cruising speed (vc)
- крена, угловая — rate of roll, roll rate
-, критическая (сваливания) — stalling speed (vs)
-, линейная — linear velocity
скорость в заданном направлении для определения скорости. — speed acting in one specified direction defines velocity.
-, линейная (скорость движения no прямой) — linear speed. rate of motion in a straight iine.
-, максимальная допустимая эксплуатационная (no терминологии икао) — maximum permissible operating speed
-, максимальная маневренная — maneuvering speed (va)
нe допускать максимального отклонения поверхности управления при превышении максимальной маневренной скорости. — maximum deflection of flight controls should not be used above va.
-, максимальная посадочная (vп max) — maximum landing speed
-, максимальная предельнодопустимая — maximum operating limit speed
-, максимальная предельнодопустимая, приборная — maximum operating limit indicated airspeed (ias)
-, максимальная эксплуатационная — maximum operating limit speed (vmo)
- максимально допустимая (vмд) — maximum operating limit speed (vmo)
- максимальной продопжительности (полета) — high-endurance cruise speed
"- мала" (надпись на указателе отклонения от заданной скорости прибора пкп) — slow
-, малая — low speed
-, малая (стеклоочистителя) — slow rate (slow)
-, минимальная — minimum speed
наименьшая установившаяся скорость горизонтального полета на высоте, значительно превышающей размер крыла, при любом режиме работы двигателей, — the lowest steady speed which can be maintained by an airplane in level flight at an altitude large in comparison with the dimension of the wings, with any throttle setting.
-, минимальная (полетная) — minimum flying speed
наименьшая установившаяся скорость, выдерживаемая при любом режиме работы двигателей в горизонтальном полете на высоте, превышающей размах крыла, — the lowest steady speed that can be maintained with any throttle setting whatsoever, by an airplane in level flight at an altitude above the ground, greater than the span of the wing.
-, минимальная посадочная (vп min) — minimum landing speed
-, минимально эволютивная (vminэ) — minimum control speed (vmc)
скорость, при которой в случае отказа критического двигателя обеспечивается возможность управления самолетом для выдерживания прямолинейного полета на данной скорости, при нулевом рыскании и угле крена не более 5°. — vmc is the speed at which, when the critical engine is suddenly made inoperative at that speed, it is possible to recover control of the airplane with the engine still inoperative and to maintain it in straight flight at that speed, either with zero yaw or with an angle of bank not in excess of 5°.
-, минимально эволютивная (в воздухе) (vminэв) — air minimum control speed (vmca)
минимальная скорость полета, при которой обеспечивается управление самолетом с макс. креном до 5° в случае отказа критического двигателя и при работе остальных двигателей на взлетном режиме. — the minimum flight speed at which the airplane is controllable with а maximum of 5 deg. bank when the critical engine suddenly becomes inoperative with the remaining engines at take-off thrust.
-, минимально эволютивная (на земле) (vmin эр) — ground minimum control speed (vmcg)
минимальная скорость разбега, обеспечивающая продолжение взлета, с использеванием только аэродинамических поверхностей правления, в случае отказа критич. двиг. и при работе остальных двигателей на взлетном режиме. — the minimum speed on the ground at which the takeoff can be continued, utilizing aerodynamic controls alone, when the critical engine suddenly becomes inoperative with the remaining engines at takeoff thrust.
-, минимально эволютивная (при начальном наборе высоты) — minimum control speed (at takeoff climb)
-, минимально эволютивная (у земли) — minimum control speed near ground
-, минимально допустимая эксплуатационная — minimum operating speed
- набора высоты (вдоль траектории) — climb speed
- набора высоты (вертикальная) — rate of climb
при проверке летных характеристик - вертикальная составляющая возд. скор. в условиях станд. атмосферы. в обычном полете - скорость удаления от земной поверхности. — in performance testing, the vertical component of the air speed in standard atmosphere. in general flying, the rate of ascent from tfle earth.
- набора высоты на маршруте — enroute climb speed
- набора высоты, начальная — initial climb-out speed
- набора высоты с убранными закрылками — flaps up climb(ing) speed, no flap climb speed
- на высоте 15м, посадочная — landing reference speed (vref)
минимальная скорость на высоте 15м при нормальной посадке. — the minimum speed at the 50 foot height in a normal landing.
- нагрева — heating rate
- наибольшей дальности — best range cruise speed
- наибольшей продолжительности полета — high-endurance cruise speed
- наивыгоднейшего набора высоты — speed for best rate of climb (vy)
- наивыгоднейшего угла траектории набора высоты — speed for best angle of climb (vx)
- на маршруте — еп route speed
- на режиме максимальной дальности, крейсерская — long-range cruise speed
- на режиме наибольшей дальности — best range cruise speed
- на режиме наибольшей продолжительности — high-endurance cruise speed
- начала изменения положения механизации (при взлете,v3) — speed at start of extendable (high-lift) devices retraction (v3)
- начала подъема передней опоры (при взлете) — rotation speed (vr)
- начала торможения (vн.т.) — brake application speed, speed at start of (wheel) brakes application
- начального набора высоты — initial climb speed, climb-out speed
- начального набора высоты (v4) (в конце полной взлетной дистанции) — initial climb speed (v4)
- начального набора высоты, установившаяся — steady initial climb speed. take-off safety speed, v2, at 35 feet shall be consistent with achievement of smooth transition to steady initial climb speed, v4 at height of 400 feet.
- (максимальная), непревышаемая — never exceed speed (vne)
-, нормируемая — rated speed
- обнаружения (искомого) светила (звезды) телескопом (астрокорректора) — star-detection rate of telescope
- образования (напр., льда) — rate of (ice) formation
-, ограниченная заявителем — speed selected by the applicant
the approach and landing speeds must be selected by the applicant.
-, ограниченная энергоемкостью тормозов — maximum brake energy speed (vmbe)
максимальная скорость движения самолета по земле, при которой энергоемкость тормозов сможет обеспечить полную остановку самолета, — the maximum speed on the ground from which a stop can be accomplished within the energy capabilities of the brakes.
-, околозвуковая — transonic speed
скорость в диапазоне от м = 0,8 - 1,2. — speed in а range of mach 0.8 to 1.2.
-, окружная — circumferential speed
-, окружная (конца лопасти) — tip speed
-, окружная (тангенциальная, касательная) — radial velocity. doppler effect in terms of radial velocity of a target.
-, опасная (самолета, превышающая vмо/mмо) — aircraft overspeed (а/с ovsp). speed exceeding vmo/mmo
- определяется для гладкой, сухой впп с жестким покрытием — vi speed is based on smooth, dry, hard surfaced runways
-, оптимальная — best speed
- отказа критического двигателя (при взлете) — critical engine failure speed (v1)
скорость, при которой после обнаружения отказавшего двигателя, дистанция продолжительного взлета до высоты 10,7 м не превышает располагаемой дистанции взлета, или дистанция до полной остановки не превышает располагаемой дистанции прерванного взлета, — the speed at which, when an engine failure is recognized, the distance to continue the takeoff to а height of 35 feet will not exceed the usable takeoff distance or, the distance to bring the airplane to а full stop will not exceed the accelerate-stop distance available.
- (сигнал) от доплеровской системы — doppler velocity
- от измерителя дисс (доплеровский измеритель путевой скорости и сноса), путевая — gappier ground speed (gsd)
- откачки (слива) топлива (на земле) — defueling rate, fuel off-loading rate
- отклонения закрылков — rate of the flaps motion
- отклонения от глиссады — glide slope deviation rate
- отклонения поверхности ynравления — control surface deflection rate
-, относительная — relative speed, speed of relative movement
motion of an aircraft relative to another.
- отработки (скорость изменения индикации прибора в зависимости от изменения параметра) — response rate /speed/, rate of response
- отработки астропоправки по курсу — rate /speed/ of response to celestial correction to azimuth e rror
- отработки поправки — correction response rate /speed/
- отработки сигнала — signal response rate
- отрыва (ла) — lirt-off speed (vlof:)
скорость в момент отрыва основных опорных устройств самолета от впп по окончании разбега при взлете (vотр.). — vlof is the speed at which the airplane first becomes airborne.
- отрыва колеса (характеристика тормозного колеса) — wheel unstick speed
-, отрыва, минимальная — minimum unstick speed (vmu)
устаназливается разработчиком (заявителем), как наименьшая скор, движения самолета на взлете, при которой еще можно производить отрыв самолета и затем продолжать взлет без применения особых методов пилотирования. — the speed selected by the applicant at and above which the airplane can be made to lift off the ground and сопtinue the take-off without displaying any hazardous characteristics.
- отрыва носового колеса (или передней стойки шасси) (vп.oп) — rotation speed (vr)
скорость начала преднамеренного увеличения угла тангажа при разбеге (рис. 113). — the speed at which the airplane rotation is initiated during the takeoff.
vr is the speed at which the nosewheel is raised and the airplane is rotated to the lift off attitude.
- отрыва передней опоры при взлете (vп.оп) — rotation speed
- перевода в набор высоты (после взлета) — initial climb speed
- перемещения органа управления — rate of control movement /displacement/
- пересечения входной кромки впп (vвк) — threshold speed (vt)
скорость самолета, с которой он пролетает над входной кромкой впп.
- пересечения входной кромки впп, демонстрационная — demonstrated threshold speed
- пересечения входной кромки впп, максимальная (vвк max.) — maximum threshold speed (vmt)
- пересечения входной кромки впп, намеченная (заданная) — target threshold speed (vtt). target threshold speed is the speed which the pilot aims to reach when the airplane crosses the threshold.
- пересечения входной кромки впп при нормальной работе всех двигателей (vвкn) — threshold speed with all еngines operating
- пересечения входной кромки впп при нормальной работе всех двигателей, намеченная (заданная) — target threshold speed with all engines operating
- пересечения входной кромки впп с двумя неработающими двигателями (vвк n-2) — threshold speed with two еngines inoperative
- пересечения входной кромки впп с одним неработающим двиг. (vвкn-1) — threshold speed with one еngine inoperative
- пересечения входной кромки впп с одним неработающим двигателем, намеченная (заданная) — target threshold speed with one engine inoperative
- пикирования — diving speed
- пикирования, демонстрационная — demonstrated flight diving speed (vdf)
-, пикирования, расчетная — design diving speed (vd)
- планирования — gliding speed
- планирования при заходе на посадку — gliding approach speed
- по азимуту, угловая — rate of turn
- поворота, угловая — rate of turn
- подъема передней опоры (стойки) шасси — rotation speed (vr)
скорость начала увеличения yгла тангажа на разбеге, преднамеренно создаваемого отклонением штурвала на себя для вывода самолета на взлетный угол атаки (vп.ст.). — the speed at which the airplane rotation is initiated during the takeoff, to lift /to rise/ the nose gear off the runway.
- поиска (искомой) звезды телескопом — (target) star detection rate of telescope
detection rate is the ratio of field of view to detection time.
-пo курсу, угловая — rate of turn
- полета — flight speed
- полета в болтанку — rough air speed (vra)
- полета в зоне ожидания — holding speed
- полета в неспокойном (турбулентном) воздухе — rough air speed (vra)
- полета для длительных режимов, наибольшая (vнэ) — normal operating limit speed (vno)
- полета, максимальная — maximum flying speed
- полета на наибольшую дальность крейсерская — best range cruise speed
- полета на наибольшую продолжительность — high-endurance cruise speed
- полета на режиме максимальной продолжительной мощности — speed (in flight) with maximum continuous power (or thrust)
- полета при болтанке — rough air speed (vra)
- полета с максимальной крейсерской тягой — speed (in flight) with maximum cruise /cruising/ thrust
-, пониженная — reduced (air) speed
при невозможности уборки створок реверса тяги продолжайте полет на пониженной скорости. — if reverser cannot be stowed, continue (flight) at reduced speed.
- по прибору (пр) — indicated airspeed (ias)
- попутного ветра — tailwind speed
- попутного ветра (название шкалы на графике) — tailwind
- порыва ветра — gust velocity
-, посадочная (vп) — landing speed
скорость самолета в момент касания основными его опорными устройствами поверхности впп — the minimum speed of an airplane at the instant of contact with the landing area in a normal landing.
-, посадочная (на высоте 15м) — landing reference speed (vref)
минимальная скорость на высоте 50 фт в условиях нормальной посадки, равная 1.3 скорости сваливания в посадочной конфигурации ла. — the minimum speed at 50 foot height in normal langin. equal to (1.3) times the stall speed in landing configuration.
-, постоянная — constant speed
-, поступательная (скорость движения вертолета вперед) — forward speed. steady angle of helicopter glide must be determined in autorotation, and with the optimum forward speed.
- по тангажу, угловая — rate of pitch
- потока газа (проходящего через двигатель, в фт/сек) — gas flow velocity (fps), vel f.p.s.
-, предельная (vпред.) — maximum operating limit speed (vmo)
скорость, преднамеренное превышение которой не допускается на всех режимах полета (набор высоты, крейсерский полет, снижение), кроме особо оговоренных случаев, допускаемых при летных испытаниях или тренировочных полетах. — speed that may not be deliberately exceeded in any regime of normal flight (climb, cruise or descent), unless а higher speed is authorized for flight test or pilot training operations.
-, предельно (свободно падающего тела) — terminal velocity
-, предельная (скорость самолета, превышающая допустимые ограничения vmo/mmo) — aircraft overspeed (а/с ovsp) а/с ovsp annunciator warns of exceeding air speed limitations (vmo/mmo)
-, предельно допустимая эксплуатационная (vпред.) — maximum operating limit speed (vmo)
- прецессии (гироскопа) — precession rate
- приближения (сближения) — closure rate
- приближения к земле (чрезмерная) — (excessive) closure rate to terrain, excessive rate of descent with respect to terrain
-,приборная воздушная (vпр) (пр) — indicated airspeed (ias)
показания указателя скорости, характеризующие величину скоростного напора, а не скорость перемещения самолета (напр.,150 км/ч пр). — airspeed indicator reading, as installed in the airplane, uncorrected for airspeed indicator system errors.
- приборная исправленная с учетом аэродинамической поправки и инструментальной погрешности прибора — calibrated airspeed (cas)
- при включении и выключении реверса тяги, максимальная — maximum speed for extending and retracting the thrust reverser, thrust reverser operating speed
- при включении стеклоочистителей лобовых стекол — windshield wiper operation speed
(т.е., скорость полета, при которой разрешается включать стеклоочистители) — do not operate the w/s wipers at speed in excess of... km/hr.
- при включении тормозов (при пробеге) — brake-on speed
- при выпуске воздушных тормозов — speed brake operating speed (vsb)
- при выпуске (уборке) посадочной фары — landing light operation speed
- при выпущенных интерцепторах (спойлерах), расчетная максимальная — design speller extended speed
- при выпуске (уборке) шасси, максимальная — maximum landing gear operating speed (vlo)
- при заходе на посадку и посадке, минимальная эволютивная — minimum control speed at арpreach and landing (vmcl)
- при (напр., взлетной) конфигурации самолета — speed in (takeaff) configuration
- при максимальной силе порыва ветра, расчетная — design speed for maximum gust intensity (vb)
- при максимальных порывах ветра, расчетная — design speed for maximum gust intensity
- при наборе высоты — climb speed
- при наборе высоты, наивыгоднейшая (оптимальная) — best climb speed
- при наборе высоты по маршруту на конечном участке чистой траектории — еn route climb speed at final net flight path segment
- принятия решения (v1) — (takeoff) decision speed (v1), critical engine failure speed (v1)
наибольшая скорость разбега самолета, при которой в случае отказа критич. двиг. (отказ распознается на этой скорости) возможно как безопасное прекращение, так и безопасное продолжение взлета. (рис. 113) — the speed at which, when an engine failure is recognized, the distance to continue the takeoff to а height of 35 feet will not exceed the usable takeoff distance, or, the distance to bring the airplane to а full stop will not exceed the accelerate-stop distance available.
- принятия решения относительная (v1/vr) — engine failure speed ratio (v1/vr ratio)
отношение скорости принятия решения v1 к скорости подъема передней стойки шасси vr. — the ratio of the engine failure speed, v1, for actual runway dimensions and conditions, to the rotation speed, vr
- принятия решения (v1), принятая при расчете макс. допустимого взлетного веса — critical engine failure speed (v1) assumed for max. allowable take-off weight max, allowable т.о. wt is derived from the corresponding critical engine failure speed (v1).
- при отказе критического двигателя (при взлете) — critical engine failure speed (v1)
- при отрыве носового колеса (см. скорость подъема передней опоры) (рис. 113) — rotation speed (vr)
- при предпосадочном маневре — (approach) pattern speed. overshooting the turn on final approach may occur with the higher (approach) pattern speed.
- при снижении — speed in descent
- при экстремальном снижении — emergency descent speed
- проваливания (резкая потеря высоты) — sink rate
- продольной составляющей ветра (график) — wind component parallel to flight path
- прохождения порога, максимальная — maximum threshold speed
- путевая (w) — ground speed (gs)
скорость перемещения самолета относительно земной поверхности, измеряемая вдоль линии пути. — aircraft velocity relative to earth surface measured along the present track.
- разбега, мннимально-эволю тивная (vmin эр) — round minimum control speed vmcg)
- разгерметизации — rate of decompression
- раскрытия (парашюта), критическая — critical opening speed
- рассогласования — rate of disagreement
-, расчетная — design speed
-, расчетная предельная (пикирования) — design diving speed (vd)
-, расчетная крейсерская — design cruising speed (vc)
-, расчетная маневренная — design maneuvering speed (va)
максимальная скорость, при которой максимальное отклонение поверхностей управления (элеронов,ph. рв) не вызывает опасных напряжений в конструкции ла. — the maximum speed at which application of full available aileron, rudder or elevator will not overstress the airplane.
- реакции — reaction rate
- реверса (поверхностей) управления — reversal speed
минимальная индикаторнаявоздушная скорость при которой возникает реверс поверхностей управления. — the lowest equivalent air speed at which reversal of control occurs.
-, рекомендованная изготовителем — manufacturer's recommended speed
-, рейсовая — block speed
-, рулежная — taxiing speed
- рыскания, угловая — rate of yaw, yaw rate
- сближения — closure /closing/ rate /speed/, rate of closure
скорость с которой два объекта приближаются друг к другу. — the speed at which two bodies approach each other.
- сближения с землей, опасная (чрезмерная) — excessive closure rate to terrain
- сваливания (vс) — stalling speed (vs)
скорость сваливания определяется началом сваливания самолета при заданных: конфигурации самолета, его полетном весе и режиме работы двигателей. — means the stalling speed or the minimum steady flight speed at which the airplane is controllabie.
- сваливания, минимальная (vсmin.) — minimurn stalling speed
- сваливания, приборная — indicated stalling speed
the indlcalcid air speed at the stall.
- сваливания при посадочной конфигурации (vсо) — stalling speed (vso). stalling speed or minimum steady flighl speed in landing configuration.
- сваливания при наработающих двигателях — power-off stalling speed
- сваливания при работающих двигателях — power-off stalling speed
- сваливания при рассматриваемой конфигурации самолета (vс1) — stalling speed (vs1). stalling speed or minimum steady. flight speed obtained in a specified configuration.
- сваливания с закрылками в посадочном положении, минимальная — minimum stalling speed with wing-flaps in landing setting
-, сверхзвуковая — supersonic speed
скорость, превышающая скорость звука, — pertaining to, or dealing with, speeds greater than the acoustic velocity.
- с выпущенными закрылками, максимальная — maximum flap extended speed (vfe)
- с выпущенными шасси, максимальная — maximum landing gear extended speed (vle)
максимальная скорость, при которой разрешается полет с выпущенным шасси, — maximum speed at which the airplane can be safety flown with the landing gear extended.
- скоса потока вниз — downwash velocity
- слежения за изменением высоты (корректором высоты) — rate of response to altitude variation /change/
- слива (откачки) топлива (на земле) — defueling rate, fuel off-loading rate
- снижения — speed of /in/ descent
-, снижения (напр., при посадке) — rate of sink, sink rate. touchdown at minimum rate of sink.
- снижения, вертикальная — rate of descent, descent /sink/ rate
- снижения в момент касания (водной поверхности при аварийной посадке на воду) — impact sink speed. the impact sink speed should be kept below 100 fpm to minimize the risk of a primary fuselage structural failure.
- снижения парашюта — parachute rate of descent
- снижения парашютов с единичным грузом — rate of descent of single cargo parachutes
- снижения, чрезмерная — excessive rate of descent, excessive sink rate
- сноса — drift rate
- согласования (гироагрегата) — rate of slaving, slaving rate
- согласования следящих сиетем (инерциальной системы) — servo loop slaving rate
- с отказавшим критическим двигателем, минимальная эеолютивная — minimum control speed with the critical engine inoperative (vmc)
- с полностью убранными закрылками, посадочная — zero flap landing speed
zero flap landing ground speeds are obviously high so fuel dumping may be necessary to reduce the bug speed.
- спуска, вертикальная — rate of sink, sink rate
touchdown at minimum rate of sink. perform high sink rate maneuver.
-, средняя — average speed
-, средняя эксплуатационная (коммерческая) — block speed
- срыва (см. скорость сваливания) — stalling speed (vs)
- схода (ракеты) с направляющей — launch(ing) speed
- тангажа, угловая — rate of pitch, pitch rate
-, текущая — current speed
ete calculation is based on current ground speed.
- (уборки) выпуска шасси, максимальная — maximum landing gear operating speed (vlo)
-, угловая — angular velocity
изменение угла за единицу времени, — the change of angle per unit time.
-, угловая — angular speed, angular rate, angular velocity
изменение направления за единицу времени, напр., отметки (цели) на экране радиолокатора. — change of direction per unit time, as for a target on a radar screen.
-, угловая инерционная (корпуса гироскопа относительно к-л. оси) — nertial angular velocity (of gyro case about the indicated axis)
-, угловая, (координатного сопровождающего) трехгранника (относительно земли) — angular velocity of moving соordinate trihedral
- у земли, минимальная эволютивная — minimum control speed near ground
-, установившаяся — steady speed
- установившегося полета, минимальная — minimum steady flight speed
- установившегося разворота, угловая — sustained turn rate (str)
- ухода гироскопа — gyro drift rate
- ухода гироскопа в азимуте — azimuth drift rate of the gyro
- флаттера, критическая — flutter speed
наименьшая индикаторная скорость, при которой возникает флаттер, — the lowest equivalent air speed at which flutter occurs.
"(-) число м" (кнопка) — v/m (button or key)
-, эволютивная (минимальная) — (minimum) control speed (vmc)
- эволютивная разбега, минимальная (vmin эр) — ground minimum control speed (vmcg)
-, экономическая — economic speed
скорость полета, при которой обеспечивается минимальный расход топлива на единицу пути в спокойном воздухе. — the flight speed at which the fuel consumption per unit of distance covered in still air, is а minimum.
-, экономическая крейсерская — economic cruising speed
-, эксплуатационная — operating speed
гашение с. — deceleration
на с. км/час — at а speed of km/hr
набор с. — acceleration
на полной с. — at full speed
нарастание с. — acceleration
переход к с. (набора высоты) — transition to (climb) speed
при с. км/час — at а speed of km/hr
разгон (ла) до с. — acceleration to speed of...
уменьшение с. (процесс) — deceleration
выдерживать с. (точно) — maintain /hold/ speed (accurately)
выражать значение с. полета в виде приборной (индикаторной) скорости — state (he speeds in terms of ias (eas)
гашение с. (перед выравниванием) — speed bleed-off (before flare)
гасить с. — decelerate
достигать с. (величина) — attain а speed of (... km/hr)
достигать с. (обозначание) — reach the speed (v1)
задавать с. — set up (speed, rate)
задавать с. км/час (при проверке барометрических приборов на земле) — apply pressure corresponding to а speed of... km/hr
набирать с. — gain /pick up/ speed, accelerate
увеличивать с. — increase speed, accelerate
уменьшать с. — decrease speed, decelerate
устанавливать с. (полета) — set up speedРусско-английский сборник авиационно-технических терминов > скорость
-
44 the
abandon the takeoffпрекращать взлетabeam the left pilot positionна левом траверзеabeam the right pilot positionна правом траверзеabort the flightпрерывать полетabort the takeoffпрерывать взлетabove the glide slopeвыше глиссадыabsorb the shock energyпоглощать энергию удараaccelerate the rotorраскручивать роторaccelerate to the speedразгонять до скоростиadhere to the flight planпридерживаться плана полетаadhere to the trackпридерживаться заданного курсаadjust the cableрегулировать тросadjust the compassустранять девиацию компасаadjust the engineрегулировать двигатель до заданных параметровadjust the headingкорректировать курсadvice to follow the controller's advanceвыполнять указание диспетчераaffect the regularityвлиять на регулярностьaffect the safetyвлиять на безопасностьalign the aircraftустанавливать воздушное судноalign the aircraft with the center lineустанавливать воздушное судно по осиalign the aircraft with the runwayустанавливать воздушное судно по оси ВППalter the headingменять курсamplify the signalусиливать сигналapparent drift of the gyroкажущийся уход гироскопаapply the brakeприменять тормозapproach the beamприближаться к лучуapprove the limitationsутверждать ограниченияapprove the tariffутверждать тарифarea of coverage of the forecastsрайон обеспечения прогнозамиarrest the development of the stallпрепятствовать сваливаниюarrive over the aerodromeприбывать в зону аэродромаassess the damageопределять стоимость поврежденияassess the distanceоценивать расстояниеassess the suitabilityоценивать пригодностьassume the controlбрать управление на себяattain the powerдостигать заданной мощностиattain the speedразвивать заданную скоростьat the end ofв конце циклаat the end of segmentв конце участка(полета) at the end of strokeв конце хода(поршня) at the ground levelна уровне землиat the start of cycleв начале циклаat the start of segmentв начале участка(полета) avoid the obstacleизбегать столкновения с препятствиемbackward movement of the stickвзятие ручки на себяbalance the aircraftбалансировать воздушное судноbalance the control surfaceбалансировать поверхность управленияbalance the propellerбалансировать воздушный винтbear on the accidentиметь отношение к происшествиюbefore the turbineперед турбинойbelow the glide slopeниже глиссадыbelow the landing minimaниже посадочного минимумаbend the cotterpin endsзагибать усики шплинтаbe off the trackуклоняться от заданного курсаbe on the level on the hourзанимать эшелон по нулямblock the brakeставить на тормозboundary of the areaграница зоныbrake the propellerстопорить воздушный винтbreak the journeyпрерывать полетbring the aircraft backвозвращать воздушное судноbring the aircraft outвыводить воздушное судно из кренаby altering the headingпутем изменения курсаcage the gyroscopeарретировать гироскопcalibrate the compassсписывать девиацию компасаcalibrate the indicatorтарировать приборcalibrate the systemтарировать системуcalibrate the tankтарировать бакcancel the driftпарировать сносcancel the flightотменять полетcancel the forecastаннулировать сообщенный прогнозcancel the signalпрекращать подачу сигналаcapture the beamзахватывать лучcarry out a circuit of the aerodromeвыполнять круг полета над аэродромомcarry out the flightвыполнять полетcenter the autopilotцентрировать автопилотcenter the wiperцентрировать щеткуchange the frequencyизменять частотуchange the pitchизменять шагchange the trackизменять линию путиcheck the readingпроверять показанияchop the powerвнезапно изменять режимcircle the aerodromeлетать по кругу над аэродромомclean the aircraftубирать механизацию крыла воздушного суднаclean up the crackзачищать трещинуclearance of the aircraftразрешение воздушному суднуclearance over the thresholdбезопасная высота пролета порогаclear for the left-hand turnдавать разрешение на левый разворотclear the aircraftдавать разрешение воздушному суднуclear the obstacleустранять препятствиеclear the pointпролетать над заданной точкойclear the runwayосвобождать ВППclimb on the courseнабирать высоту при полете по курсуclose the bucketsзакрывать створкиclose the circuitзамыкать цепьclose the flightзаканчивать регистрацию на рейсcome clear of the groundотрываться от землиcommence the flightначинать полетcommence the landing procedureначинать посадкуcompare the readingsсравнивать показанияcompensate the compassустранять девиацию компасаcompensate the errorсписывать девиациюcompile the accident reportсоставлять отчет об авиационном происшествииcomplete the circuitзакольцовыватьcomplete the flightзавершать полетcomplete the flight planсоставлять план полетаcomplete the turnзавершать разворотcompute the visual rangeвычислять дальность видимостиconditions beyond the experienceусловия, по сложности превосходящие квалификацию пилотаconditions on the routeусловия по заданному маршрутуconsidering the obstaclesучет препятствийconstruct the procedureразрабатывать схемуcontainerize the cargoупаковывать груз в контейнереcontinue operating on the fuel reserveпродолжать полет на аэронавигационном запасе топливаcontinue the flightпродолжать полетcontinue the takeoffпродолжать взлетcontribute towards the safetyспособствовать повышению безопасностиcontrol the aircraftуправлять воздушным судномcontrol the pitchуправлять шагомconvert the frequencyпреобразовывать частотуconvey the informationпередавать информациюcorrect the troubleустранять отказcorrespond with the operating minimaсоответствовать эксплуатационному минимумуcounteract the rotor torqueуравновешивать крутящий момент несущего винтаcoverage of the chartкартографируемый районcover the routeпробегать по полному маршрутуcrosscheck the readingsсверять показанияcross the airwayпересекать авиатрассуdata on the performanceкоординаты характеристикиdecelerate in the flightгасить скорость в полетеdecelerate the aircraft toснижать скорость воздушного судна доdecrease the deviationуменьшать величину отклонения от курсаdecrease the pitchуменьшать шагdecrease the speedуменьшать скоростьde-energize the busобесточивать шинуdefine the failureопределять причины отказаdeflate the tireослаблять давление в пневматикеdeflect the control surfaceотклонять поверхность управления(напр. элерон) delay the turnзатягивать разворотdelimit the runwayобозначать границы ВППdelimit the taxiwayобозначать границы рулежной дорожкиdelineate the runwayочерчивать границы ВППdelineate the taxiwayобозначать размеры рулежной дорожкиdeliver the baggageдоставлять багажdeliver the clearanceпередавать разрешениеdenote the obstacleобозначать препятствиеdenoting the obstacleобозначение препятствияdepart from the rulesотступать от установленных правилdeparture from the standardsотклонение от установленных стандартовdepress the pedalнажимать на педальdetach the loadотцеплять грузdetach the wingотстыковывать крылоdeterminate the causeустанавливать причинуdetermine amount of the errorопределять величину девиацииdetermine the delayустанавливать время задержкиdetermine the extent of damageопределять степень поврежденияdetermine the frictionопределять величину сцепленияdetermine the sign of deviationопределять знак девиацииdetract from the safetyснижать безопасностьdevelopment of the stallпроцесс сваливанияdeviate from the flight planотклоняться от плана полетаdeviate from the glide slopeотклоняться от глиссадыdeviate from the headingотклоняться от заданного курсаdeviation from the courseотклонение от заданного курсаdeviation from the level flightотклонение от линии горизонтального полетаdischarge the cargoснимать груз в контейнереdisclose the faresопубликовывать тарифыdiscontinue the takeoffпрекращать взлетdisengage the autopilotвыключать автопилотdisplace the center-of-gravityизменять центровкуdisregard the indicatorпренебрегать показаниями прибораdisseminate the forecastраспространять прогнозdrain the tankсливать из бакаdraw the conclusionподготавливать заключениеdrift off the courseсносить с курсаdrift off the headingуходить с заданного курсаdrop the noseсваливаться на носduck below the glide pathрезко снижаться относительно глиссадыease the aircraft onвыравнивать воздушное судноeffect adversely the strengthнарушать прочность(напр. фюзеляжа) elevation of the stripпревышение летной полосыeliminate the cause ofустранять причинуeliminate the hazardустранять опасную ситуациюeliminate the ice formationустранять обледенениеeliminate the source of dangerустранять источник опасности(для воздушного движения) enable the aircraft toдавать воздушному судну правоendanger the aircraftсоздавать опасность для воздушного суднаendange the safetyугрожать безопасностиendorse the licenseделать отметку в свидетельствеenergize the busподавать электропитание на шинуenforce rules of the airобеспечивать соблюдение правил полетовengage the autopilotвключать автопилотensure the adequate provisionsобеспечивать соответствующие меры предосторожностиenter the aircraftзаносить воздушное судно в реестрenter the aircraft standзаруливать на место стоянки воздушного суднаenter the airwayвыходить на авиатрассуenter the final approach trackвыходить на посадочную прямуюenter the spinвходить в штопорenter the tariff into forceутверждать тарифную ставкуenter the traffic circuitвходить в круг движенияenter the turnвходить в разворотentry into the aerodrome zoneвход в зону аэродромаentry into the flareвходить в этап выравниванияerection of the gyroвосстановление гироскопаestablish the characteristicsустанавливать характеристикиestablish the flight conditionsустанавливать режим полетаestablish the procedureустанавливать порядокexceeding the stalling angleвыход на закритический угол атакиexceed the stopпреодолевать упорexecute the manoeuvreвыполнять маневрexecute the turnвыполнять разворотexpedite the clearanceускорять оформлениеexpress the altitudeчетко указывать высотуextend the agreementпродлевать срок действия соглашенияextend the landing gearвыпускать шассиextend the legsвыпускать шассиextreme aft the center-of-gravityпредельная задняя центровкаextreme forward the center-of-gravityпредельная передняя центровкаeye height over the thresholdуровень положения глаз над порогом ВППfail into the spinсрываться в штопорfail to follow the procedureне выполнять установленную схемуfail to observe the limitationsне соблюдать установленные ограниченияfail to provide the manualsне обеспечивать соответствующими инструкциямиfall into the spinсрываться в штопорfeather the propellerставить воздушный винт во флюгерное положениеfile the flight planрегистрировать план полетаfirst freedom of the airпервая степень свободы воздухаflight inbound the stationполет в направлении на станциюflight outbound the stationполет в направлении от станцииflight over the high seasполет над открытым моремflight under the rulesполет по установленным правиламfly above the weatherлетать над верхней кромкой облаковfly at the altitudeлетать на заданной высотеfly into the sunлетать против солнцаfly into the windлетать против ветраfly on the autopilotлетать на автопилотеfly on the courseлетать по курсуfly on the headingлетать по курсуfly the aircraft1. управлять самолетом2. пилотировать воздушное судно fly the beamлететь по лучуfly the circleлетать по кругуfly the glide-slope beamлетать по глиссадному лучуfly the great circleлетать по ортодромииfly the headingвыполнять полет по курсуfly the rhumb lineлетать по локсодромииfly under the autopilotпилотировать при помощи автопилотаfly under the supervision ofлетать под контролемfocus the lightфокусировать фаруfollow the beamвыдерживать направление по лучуfollow the glide slopeвыдерживать глиссадуfollow up the aircraftсопровождать воздушное судноforfeit the reservationлишать брониfreedom of the airстепень свободы воздухаfuel the tankзаправлять бак топливомfulfil the conditionsвыполнять условияgain the air supremacyзавоевывать господство в воздухеgain the altitudeнабирать заданную высотуgain the glide pathвходить в глиссадуgain the powerдостигать заданной мощностьgain the speedразвивать заданную скоростьgather the speedнаращивать скоростьget into the aerodromeприземляться на аэродромеget on the courseвыходить на заданный курсget the heightнабирать заданную высотуgive the wayуступать трассуgo out of the spinвыходить из штопораgovern the applicationрегулировать применениеgovern the flightуправлять ходом полетаgovern the operationруководить эксплуатациейgrade of the pilot licenceкласс пилотского свидетельстваguard the frequencyпрослушивать частотуhandle the baggageобслуживать багажhandle the flight controlsоперировать органами управления полетомhave the runway in sightчетко видеть ВППhead the aircraft into windнаправлять воздушное судно против ветраhold on the headingвыдерживать на заданном курсеhold over the aidsвыполнять полет в зоне ожиданияhold over the beaconвыполнять полет в режиме ожидания над аэродромомhold the aircraft on the headingвыдерживать воздушное судно на заданном курсеhold the brakeудерживать тормозаhold the heading on the compassвыдерживать курс по компасуhold the positionожидать на местеhold the speed accuratelyточно выдерживать скоростьhover at the height ofзависать на высотеhovering in the ground effectвисение в зоне влияния землиidentify the aerodrome from the airопознавать аэродром с воздухаidentify the aircraftопознавать воздушное судноidentify the center lineобозначать осевую линиюimpair the operationнарушать работуimpair the safetyснижать безопасностьimpose the limitationsналагать ограниченияin computing the fuelпри расчете количества топливаin conformity with the specificationsв соответствии с техническими условиямиincrease a camber of the profileувеличивать кривизну профиляincrease the pitchувеличивать шагincrease the speedувеличивать скоростьindicate the location from the airопределять местоположение с воздухаinherent in the aircraftсвойственный воздушному суднуinitiate the turnвходить в разворотinstall in the aircraftустанавливать на борту воздушного суднаinstall on the aircraftмонтировать на воздушном суднеintercept the beamвыходить на ось лучаintercept the glide slopeзахватывать луч глиссадыInternational Relations Department of the Ministry of Civil AviationУправление внешних сношений Министерства гражданской авиацииinterpretation of the signalрасшифровка сигналаin the case of delayв случае задержкиin the event of a mishapв случае происшествияin the event of malfunctionв случая отказаintroduction of the correctionsввод поправокissue the certificateвыдавать сертификатjeopardize the flightподвергать полет опасностиjudge the safetyоценивать степень опасностиkeep clear of the aircraftдержаться на безопасном расстоянии от воздушного суднаkeep out of the wayне занимать трассуkeep tab on the fleetвести учет паркаkeep the aircraft onвыдерживать воздушное судноkeep the altitudeвыдерживать заданную высотуkeep the ball centeredдержать шарик в центреkeep the paceвыдерживать дистанциюkeep to the minimaустанавливать минимумkick off the driftпарировать сносkill the landing speedгасить посадочную скоростьlanding off the aerodromeпосадка вне аэродромаland into the windвыполнять посадку против ветраland the aircraftприземлять воздушное судноlatch the pitch stopустанавливать на упор шага(лопасти воздушного винта) latch the propeller flight stopставить воздушный винт на полетный упорlateral the center-of-gravityпоперечная центровкаlay the routeпрокладывать маршрутlead in the aircraftзаруливать воздушное судноlead out the aircraftвыруливать воздушное судноleave the airspaceпокидать данное воздушное пространствоleave the altitudeуходить с заданной высотыleave the planeвыходить из самолетаleave the runwayосвобождать ВППlevel the aircraft outвыравнивать воздушное судноlie beyond the rangeнаходиться вне заданного пределаline up the aircraftвыруливать воздушное судно на исполнительный стартload the gearзагружать редукторload the generatorнагружать генераторload the structureнагружать конструкциюlock the landing gearставить шасси на замкиlock the landing gear downставить шасси на замок выпущенного положенияlock the landing gear upставить шасси на замок убранного положенияlock the legsустанавливать шасси на замки выпущенного положенияlongitudinal the center-of-gravityпродольная центровкаlose the altitudeтерять высотуlose the speedтерять заданную скоростьloss the controlтерять управлениеlower the landing gearвыпускать шассиlower the legsвыпускать шассиlower the nose wheelопускать носовое колесоmaintain the aircraft at readiness toдержать воздушное судно готовымmaintain the altitudeвыдерживать заданную высотуmaintain the courseвыдерживать заданный курсmaintain the flight levelвыдерживать заданный эшелон полетаmaintain the flight procedureвыдерживать установленный порядок полетовmaintain the flight watchвыдерживать заданный график полетаmaintain the flying speedвыдерживать требуемую скорость полетаmaintain the headingвыдерживать заданный курсmaintain the parameterвыдерживать заданный параметрmake a complaint against the companyподавать жалобу на компаниюmake the aircraft airborneотрывать воздушное судно от землиmake the course changeизменять курсmake the reservationзабронировать местоmanipulate the flight controlsоперировать органами управления полетомmark the obstacleмаркировать препятствиеmean scale of the chartсредний масштаб картыmeet the airworthiness standardsудовлетворять нормам летной годностиmeet the conditionsвыполнять требованияmeet the specificationsсоблюдать технические условияmisjudge the distanceнеправильно оценивать расстояниеmodify the flight planуточнять план полетаmonitor the flightследить за полетомmonitor the frequencyконтролировать заданную частотуmoor the aircraftшвартовать воздушное судноmount on the frameмонтировать на шпангоутеmove off from the restстрагивать с местаmove the blades to higherутяжелять воздушный винтmove the pedal forwardдавать педаль впередname-code of the routeкодирование названия маршрутаneglect the indicatorне учитывать показания прибораnote the instrument readingsотмечать показания приборовnote the timeзасекать времяobserve the conditionsсоблюдать условияobserve the instrumentsследить за показаниями приборовobserve the readingsнаблюдать за показаниямиobtain the correct pathвыходить на заданную траекториюobtain the flying speedнабирать заданную скорость полетаobtain the forecastполучать прогнозoffer the capacityпредлагать объем загрузкиoff-load the pumpразгружать насосon the base legвыполнил третий разворотon the beamв зоне действия лучаon the cross-wind legвыполнил первый разворотon the down-wind legвыполнил второй разворотon the eastbound legна участке маршрута в восточном направленииon the final legвыполнил четвертый разворотon the left base legподхожу к четвертому с левым разворотомon the speedна скоростиon the upwind legвхожу в кругopen the bucketsоткрывать створкиopen the circuitразмыкать цепьopen the door inward outwardоткрывать люк внутрь наружуoperate from the aerodromeвыполнять полеты с аэродромаoperate under the conditionsэксплуатировать в заданных условияхovercome the obstacleпреодолевать препятствиеovercome the spring forceпреодолевать усилие пружиныoverflying the runwayпролет над ВППoverpower the autopilotпересиливать автопилотoverrun the runwayвыкатываться за пределы ВППovershoot capture of the glide slopeпоздний захват глиссадного лучаover the territoryнад территориейover the topнад верхней границей облаковover the wingнад крыломpark in the baggageсдавать в багажparticipation in the investigationучастие в расследованииpassing over the runwayпролет над ВППpass the signalпропускать сигналpast the turbineза турбинойperform the service bulletinвыполнять доработку по бюллетенюpick up the signalфиксировать сигналpick up the speedразвивать заданную скоростьpilot on the controlsпилот, управляющий воздушным судномpitch the nose downwardопускать носplace the aircraftустанавливать воздушное судноplace the flaps inустанавливать закрылкиplane of symmetry of the aeroplaneплоскость симметрии самолетаplot the aircraftзасекать воздушное судноpotential hazard to the safeпотенциальная угроза безопасностиpower the busвключать шинуpresent the minimum hazardпредставлять минимальную опасностьpreserve the clearanceсохранять запас высотыpressurize the bearingуплотнять опору подачей давленияproduce the signalвыдавать сигналprofitability over the routeэффективность маршрутаprolongation of the ratingпродление срока действия квалификационной отметкиproperly identify the aircraftточно опознавать воздушное судноprotect the circuitзащищать цепьprove the systemиспытывать системуpull out of the spinвыводить из штопораpull the aircraft out ofбрать штурвал на себяpull the control column backбрать штурвал на себяpull the control stick backбрать ручку управления на себяpull up the helicopterрезко увеличивать подъемную силу вертолетаpuncture the tireпрокалывать покрышкуpush the aircraft backбуксировать воздушное судно хвостом впередpush the aircraft downснижать высоту полета воздушного суднаpush the control columnотдавать штурвал от себяpush the control stickотдавать ручку управления от себяput into the spinвводить в штопорput on the courseвыходить на заданный курсput the aircraft into productionзапускать воздушное судно в производствоput the aircraft on the courseвыводить воздушное судно на заданный курсput the aircraft overпереводить воздушное судно в горизонтальный полетraise the landing gearубирать шассиreach the altitudeзанимать заданную высотуreach the flight levelзанимать заданный эшелон полетаreach the glide pathвходить в зону глиссадыreach the speedдостигать заданных оборотовreach the stalling angleвыходить на критический уголread the drift angleотсчитывать угол сносаread the instrumentsсчитывать показания приборовreceive the signalпринимать сигналrecord the readingsрегистрировать показанияrecover from the spinвыходить из штопораrecover from the turnвыходить из разворотаrecovery from the manoeuvreвыход из маневраrecovery from the stallвывод из режима сваливанияrecovery from the turnвыход из разворотаrectify the compassустранять девиацию компасаreduce the hazardуменьшать опасностьreestablish the trackвосстанавливать заданную линию путиregain the glide pathвозвращаться на глиссадуregain the speedвосстанавливать скоростьregain the trackвозвращаться на заданный курсregister the aircraftрегистрировать воздушное судноrelease the aircraftпрекращать контроль воздушного суднаrelease the landing gearснимать шасси с замков убранного положенияrelease the landing gear lockснимать шасси с замкаrelease the loadсбрасывать грузrelease the uplockоткрывать замок убранного положенияrelocate the plane's trimвосстанавливать балансировку самолетаremedy the defectустранять дефектremedy the troubleустранять отказremove the aircraftудалять воздушное судноremove the crackвыбирать трещинуremove the tangleраспутыватьrender the certificateпередавать сертификатrenew the licenseвозобновлять действие свидетельства или лицензииrenew the ratingвозобновлять действие квалификационной отметкиreplan the flightизмерять маршрут полетаreport reaching the altitudeдокладывать о занятии заданной высотыreport reaching the flight levelдокладывать о занятии заданного эшелона полетаreport the headingсообщать курсreset the gyroscopeвосстанавливать гироскопrestart the engine in flightзапускать двигатель в полетеrestore the systemвосстанавливать работу системыrestrict the operationsнакладывать ограничения на полетыresume the flightвозобновлять полетresume the journeyвозобновлять полетretain the leverфиксировать рукояткуretract the landing gearубирать шассиreturn the aircraft to serviceдопускать воздушное судно к дальнейшей эксплуатацииreverse the propellerпереводить винт на отрицательную тягуroll in the aircraftвводить воздушное судно в кренroll into the turnвходить в разворотroll left on the headingвыходить на курс с левым разворотомroll on the aircraftвыполнять этап пробега воздушного суднаroll on the courseвыводить на заданный курсroll out of the turnвыходить из разворотаroll out on the headingвыходить на заданный курсroll out the aircraftвыводить воздушное судно из кренаroll right on the headingвыходить на курс с правым разворотомrotate the aircraftотрывать переднюю опору шасси воздушного суднаrotate the bogieзапрокидывать тележкуrules of the airправила полетовrun fluid through the systemпрогонять системуrun off the runwayвыкатываться за пределы ВППrun out the landing gearвыпускать шассиschedule the performancesзадавать характеристикиseat the brushпритирать щеткуsecond freedom of the airвторая степень свободы воздухаsecure the mishap siteобеспечивать охрану места происшествияselect the courseвыбирать курсselect the flight routeвыбирать маршрут полетаselect the frequencyвыбирать частотуselect the headingзадавать курсselect the modeвыбирать режимselect the track angleзадавать путевой уголseparate the aircraftэшелонировать воздушное судноserve out the service lifeвырабатывать срок службыset at the desired angleустанавливать на требуемый уголset the courseустанавливать курсset the flaps atустанавливать закрылкиset the headingустанавливать курсset the propeller pitchустанавливать шаг воздушного винтаset the throttle leverустанавливать сектор газаset up the speedзадавать определенную скоростьshift the center-of-gravityсмещать центровкуshop out the skinвырубать обшивкуsimulate the instruments responsesимитировать показания приборовslacken the cableослаблять натяжение тросаslave the gyroscopeсогласовывать гироскопsmooth on the headingплавно выводить на заданный курсsmooth out the crackудалять трещинуsmooth out the dentвыправлять вмятинуsmooth the signalсглаживать сигналspace the aircraftопределять зону полета воздушного суднаspin the gyro rotorраскручивать ротор гироскопаstate instituting the investigationгосударство, назначающее расследование(авиационного происшествия) state submitting the reportгосударство, представляющее отчет(об авиационном происшествии) steady airflow about the wingустановившееся обтекание крыла воздушным потокомsteer the aircraftуправлять воздушным судномstop the crack propagationпредотвращать развитие трещиныstop the leakageустранять течьsubmit the flight planпредставлять план полетаsubstitute the aircraftзаменять воздушное судноsupervision approved by the Stateнадзор, установленный государствомsupply the signalподавать сигналswing the compassсписывать девиацию компасаswing the door openоткрывать створкуswitch to the autopilotпереходить на управление с помощью автопилотаswitch to the proper tankвключать подачу топлива из бака с помощью электрического кранаtakeoff into the windвзлетать против ветраtake off power to the shaftотбирать мощность на валtake over the controlбрать управление на себяtake the bearingбрать заданный пеленгtake the energy fromотбирать энергиюtake the readingsсчитывать показанияtake the taxiwayзанимать рулежную дорожкуtake up the backlashустранять люфтtake up the positionвыходить на заданную высотуtap air from the compressorотбирать воздух от компрессораterminate the agreementпрекращать действие соглашенияterminate the controlпрекращать диспетчерское обслуживаниеterminate the flightзавершать полетtest in the wind tunnelпродувать в аэродинамической трубеtest the systemиспытывать системуthe aircraft under commandуправляемое воздушное судноthe route to be flownнамеченный маршрут полетаthe route to be followedустановленный маршрут полетаthe runway is clearВПП свободнаthe runway is not clearВПП занятаthe search is terminatedпоиск прекращенthrough on the same flightтранзитом тем же рейсомthroughout the service lifeна протяжении всего срока службыtighten the turnуменьшать радиус разворотаtime in the airналет часовtime the valvesрегулировать газораспределениеtitl of the gyroзавал гироскопаto define the airspaceопределять границы воздушного пространстваtransfer the controlпередавать диспетчерское управление другому пунктуtransit to the climb speedпереходить к скорости набора высотыtrim the aircraftбалансировать воздушное судноturn into the windразворачивать против ветраturn off the systemвыключать системуturn on the systemвключать системуturn the proper tank onвключать подачу топлива из бока с помощью механического кранаunarm the systemотключать состояние готовности системыuncage the gyroscopeразарретировать гироскопunfeather the propellerвыводить воздушный винт из флюгерного положенияunlatch the landing gearснимать шасси с замковunlatch the pitch stopснимать с упора шага(лопасти воздушного винта) unstall the aircraftвыводить воздушное судно из сваливания на крылоunstick the aircraftотрывать воздушное судно от землиuplift the freightпринимать груз на бортviolate the lawнарушать установленный порядокwander off the courseсбиваться с курсаwarn the aircraftпредупреждать воздушное судноwind the generatorнаматывать обмотку генератораwith decrease in the altitudeсо снижением высотыwithdraw from the agreementвыходить из соглашенияwith increase in the altitudeс набором высотыwithin the frame ofв пределахwithin the rangeв заданном диапазонеwithstand the loadвыдерживать нагрузкуwork on the aircraftвыполнять работу на воздушном суднеwrite down the readingsфиксировать показания -
45 кабель
электрический кабель
кабель
Кабельное изделие, содержащее одну или более изолированных жил (проводников), заключенных в металлическую или неметаллическую оболочку, поверх которой в зависимости от условий прокладки и эксплуатации может иметься соответствующий защитный покров, в который может входить броня, и пригодное, в частности, для прокладки в земле и под водой.
[ ГОСТ 15845-80]
кабель
1. Одна или несколько изолированных токопроводящих жил или проводников, заключённых в герметическую оболочку с верхним защитным покрытием
2. Гибкий несущий элемент висячих систем, кабель-кранов и канатных подвесных дорог
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]
кабель электрический
Кабель 1. для передачи на расстояние электрической энергии либо сигналов высокого или низкого напряжений
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]
кабель
Один или несколько скрученных изолированных гибких проводников, предназначенных для обматывания объектов контроля в целях их продольного или тороидного намагничивания.
кабель
Экранированный проводник, соединяющий электронный блок с преобразователем или электронные блоки между собой
кабель
-
[IEV number 151-12-38]EN
cable
assembly of one or more conductors and/or optical fibres, with a protective covering and possibly filling, insulating and protective material
[IEV number 151-12-38]FR
câble, m
assemblage d'un ou plusieurs conducteurs ou fibres optiques, muni d'une enveloppe protectrice et éventuellement de matériaux de remplissage, d'isolation et de protection
[IEV number 151-12-38]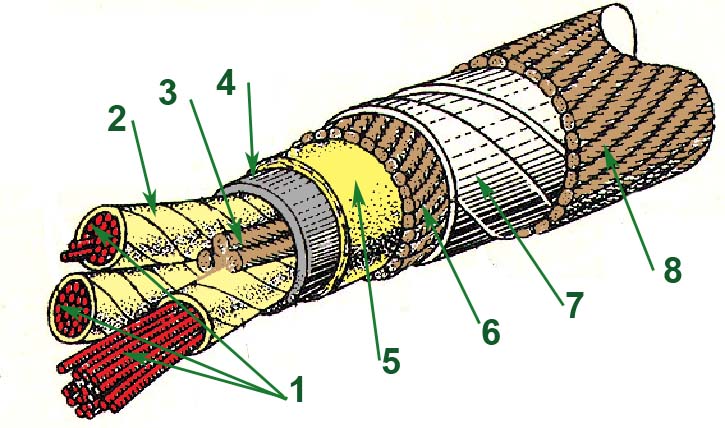
Пример конструкции кабеля:
1 - Токопроводящие жилы;
2 - Бумага, пропитанная маслом;
3 - Джутовый заполнитель;
4 - Свинцовая оболочка;
5 - Бумажная лента;
6 - Прослойка из джута;
7 - Стальная ленточная броня;
8 - Джутовый покров.
Кабели на напряжение до 1 кВ и выше...
[ГОСТ 12.2.007.14-75]
... силовые кабели с медными или алюминиевыми жилами с резиновой изоляцией, в свинцовой, поливинилхлоридной или резиновой оболочке, с защитными покровами или без них, предназначенные для неподвижной прокладки в электрических сетях напряжением 660 В переменного тока частотой 50 Гц или 1000 В постоянного тока и на напряжение 3000, 6000 и 10000 В постоянного тока.
Кабели предназначены для прокладки:
- на трассах с неограниченной разностью уровней.
- внутри помещений, в каналах, туннелях, в местах, не подверженных вибрации, в условиях отсутствия механических воздействий на кабель..
- в земле (траншеях), если кабель не подвергается значительным растягивающим усилиям
Строительная длина кабелей должна быть не менее 125 м. Допускаются маломерные отрезки длиной не менее 20 м в количестве не более 10 % от общей длины сдаваемой партии кабелей.
[ ГОСТ 433-73]
... монтажные многожильные кабели с поливинилхлоридной изоляцией и оболочкой, предназначенные для фиксированного межприборного монтажа электрических устройств, работающих при номинальном переменном напряжении до 500 В частоты до 400 Гц или постоянном напряжении до 750 В.
Требования к стойкости при механических воздействиях
- Кабели должны быть механически прочными при воздействии вибрационных нагрузок в диапазоне частот 1-5000 Гц с ускорением до 392 м/с2 (40 g).
- Кабели должны быть механически прочными при воздействии многократных ударов с ускорением 1471 м/с2 (150 g) при длительности удара 1-3 мс.
- Кабели должны быть механически прочными при воздействии одиночных ударов с ускорением 9810 м/с2(1000 g) и линейных нагрузок с ускорением до 4905 м/с2 (500 g).
Требования к стойкости при климатических воздействиях
-Кабели должны быть стойкими к воздействию повышенной температуры 343 К (70°С), при этом за повышенную температуру принимают температуру наиболее нагреваемого элемента конструкции кабеля.
- Кабели должны быть стойкими к воздействию пониженной температуры - 223 К (минус 50°С).
- Кабели должны быть стойкими к воздействию относительной влажности воздуха до 98 % при температуре 308 К (35°С).
- Кабели климатического исполнения Т должны быть стойкими к воздействию плесневых грибов.
[ ГОСТ 10348-80]
Тематики
- кабели, провода...
Классификация
>>>Обобщающие термины
Действия
- вводить кабель в отверстие
- вводить кабель в эксплуатацию
- наматывать кабель на барабан
- подключать кабель
- присоединять кабель
- прокладывать кабель
Синонимы
Сопутствующие термины
- неподвижная прокладка
- прокладка кабеля
- прокладка кабеля в земляной траншее
- прокладка кабеля непосредственно в грунте
- фиксированный межприборный монтаж электрических устройств
EN
DE
FR
Русско-немецкий словарь нормативно-технической терминологии > кабель
-
46 программируемый логический контроллер
- speicherprogrammierbare Steuerung, f
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего. Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы. Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7. Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series. Рис. 4. Резервированный контроллер FCP270.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA). Рис. 5. Контроллер AC800M.
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-немецкий словарь нормативно-технической терминологии > программируемый логический контроллер
47 cable
гибкая нить
Стержень, способный сопротивляться только растяжению.
[Сборник рекомендуемых терминов. Выпуск 82. Строительная механика. Академия наук СССР. Комитет научно-технической терминологии. 1970 г.]Тематики
- строительная механика, сопротивление материалов
EN
DE
FR
электрический кабель
кабель
Кабельное изделие, содержащее одну или более изолированных жил (проводников), заключенных в металлическую или неметаллическую оболочку, поверх которой в зависимости от условий прокладки и эксплуатации может иметься соответствующий защитный покров, в который может входить броня, и пригодное, в частности, для прокладки в земле и под водой.
[ ГОСТ 15845-80]
кабель
1. Одна или несколько изолированных токопроводящих жил или проводников, заключённых в герметическую оболочку с верхним защитным покрытием
2. Гибкий несущий элемент висячих систем, кабель-кранов и канатных подвесных дорог
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]
кабель электрический
Кабель 1. для передачи на расстояние электрической энергии либо сигналов высокого или низкого напряжений
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]
кабель
Один или несколько скрученных изолированных гибких проводников, предназначенных для обматывания объектов контроля в целях их продольного или тороидного намагничивания.
кабель
Экранированный проводник, соединяющий электронный блок с преобразователем или электронные блоки между собой
кабель
-
[IEV number 151-12-38]EN
cable
assembly of one or more conductors and/or optical fibres, with a protective covering and possibly filling, insulating and protective material
[IEV number 151-12-38]FR
câble, m
assemblage d'un ou plusieurs conducteurs ou fibres optiques, muni d'une enveloppe protectrice et éventuellement de matériaux de remplissage, d'isolation et de protection
[IEV number 151-12-38]
Пример конструкции кабеля:
1 - Токопроводящие жилы;
2 - Бумага, пропитанная маслом;
3 - Джутовый заполнитель;
4 - Свинцовая оболочка;
5 - Бумажная лента;
6 - Прослойка из джута;
7 - Стальная ленточная броня;
8 - Джутовый покров.
Кабели на напряжение до 1 кВ и выше...
[ГОСТ 12.2.007.14-75]
... силовые кабели с медными или алюминиевыми жилами с резиновой изоляцией, в свинцовой, поливинилхлоридной или резиновой оболочке, с защитными покровами или без них, предназначенные для неподвижной прокладки в электрических сетях напряжением 660 В переменного тока частотой 50 Гц или 1000 В постоянного тока и на напряжение 3000, 6000 и 10000 В постоянного тока.
Кабели предназначены для прокладки:
- на трассах с неограниченной разностью уровней.
- внутри помещений, в каналах, туннелях, в местах, не подверженных вибрации, в условиях отсутствия механических воздействий на кабель..
- в земле (траншеях), если кабель не подвергается значительным растягивающим усилиям
Строительная длина кабелей должна быть не менее 125 м. Допускаются маломерные отрезки длиной не менее 20 м в количестве не более 10 % от общей длины сдаваемой партии кабелей.
[ ГОСТ 433-73]
... монтажные многожильные кабели с поливинилхлоридной изоляцией и оболочкой, предназначенные для фиксированного межприборного монтажа электрических устройств, работающих при номинальном переменном напряжении до 500 В частоты до 400 Гц или постоянном напряжении до 750 В.
Требования к стойкости при механических воздействиях
- Кабели должны быть механически прочными при воздействии вибрационных нагрузок в диапазоне частот 1-5000 Гц с ускорением до 392 м/с2 (40 g).
- Кабели должны быть механически прочными при воздействии многократных ударов с ускорением 1471 м/с2 (150 g) при длительности удара 1-3 мс.
- Кабели должны быть механически прочными при воздействии одиночных ударов с ускорением 9810 м/с2(1000 g) и линейных нагрузок с ускорением до 4905 м/с2 (500 g).
Требования к стойкости при климатических воздействиях
-Кабели должны быть стойкими к воздействию повышенной температуры 343 К (70°С), при этом за повышенную температуру принимают температуру наиболее нагреваемого элемента конструкции кабеля.
- Кабели должны быть стойкими к воздействию пониженной температуры - 223 К (минус 50°С).
- Кабели должны быть стойкими к воздействию относительной влажности воздуха до 98 % при температуре 308 К (35°С).
- Кабели климатического исполнения Т должны быть стойкими к воздействию плесневых грибов.
[ ГОСТ 10348-80]
Тематики
- кабели, провода...
Классификация
>>>Обобщающие термины
Действия
- вводить кабель в отверстие
- вводить кабель в эксплуатацию
- наматывать кабель на барабан
- подключать кабель
- присоединять кабель
- прокладывать кабель
Синонимы
Сопутствующие термины
- неподвижная прокладка
- прокладка кабеля
- прокладка кабеля в земляной траншее
- прокладка кабеля непосредственно в грунте
- фиксированный межприборный монтаж электрических устройств
EN
DE
FR
электрический провод
провод
Кабельное изделие, содержащее одну или несколько скрученных проволок или одну или более изолированных жил, поверх оторых в зависимости от условий прокладки и эксплуатации может иметься легкая неметаллическая оболочка, обмотка и (или) оплетка из волокнистых материалов или проволоки, и не предназначенное, как правило, для прокладки в земле.
[ ГОСТ 15845-80]
провод электрический
Металлический проводник, состоящий из одной или нескольких проволок, служащий для передачи и распределения электрической энергии
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]Тематики
- кабели, провода...
Синонимы
EN
DE
FR
Франко-русский словарь нормативно-технической терминологии > cable
48 câble électrique
электрический кабель
кабель
Кабельное изделие, содержащее одну или более изолированных жил (проводников), заключенных в металлическую или неметаллическую оболочку, поверх которой в зависимости от условий прокладки и эксплуатации может иметься соответствующий защитный покров, в который может входить броня, и пригодное, в частности, для прокладки в земле и под водой.
[ ГОСТ 15845-80]
кабель
1. Одна или несколько изолированных токопроводящих жил или проводников, заключённых в герметическую оболочку с верхним защитным покрытием
2. Гибкий несущий элемент висячих систем, кабель-кранов и канатных подвесных дорог
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]
кабель электрический
Кабель 1. для передачи на расстояние электрической энергии либо сигналов высокого или низкого напряжений
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]
кабель
Один или несколько скрученных изолированных гибких проводников, предназначенных для обматывания объектов контроля в целях их продольного или тороидного намагничивания.
кабель
Экранированный проводник, соединяющий электронный блок с преобразователем или электронные блоки между собой
кабель
-
[IEV number 151-12-38]EN
cable
assembly of one or more conductors and/or optical fibres, with a protective covering and possibly filling, insulating and protective material
[IEV number 151-12-38]FR
câble, m
assemblage d'un ou plusieurs conducteurs ou fibres optiques, muni d'une enveloppe protectrice et éventuellement de matériaux de remplissage, d'isolation et de protection
[IEV number 151-12-38]
Пример конструкции кабеля:
1 - Токопроводящие жилы;
2 - Бумага, пропитанная маслом;
3 - Джутовый заполнитель;
4 - Свинцовая оболочка;
5 - Бумажная лента;
6 - Прослойка из джута;
7 - Стальная ленточная броня;
8 - Джутовый покров.
Кабели на напряжение до 1 кВ и выше...
[ГОСТ 12.2.007.14-75]
... силовые кабели с медными или алюминиевыми жилами с резиновой изоляцией, в свинцовой, поливинилхлоридной или резиновой оболочке, с защитными покровами или без них, предназначенные для неподвижной прокладки в электрических сетях напряжением 660 В переменного тока частотой 50 Гц или 1000 В постоянного тока и на напряжение 3000, 6000 и 10000 В постоянного тока.
Кабели предназначены для прокладки:
- на трассах с неограниченной разностью уровней.
- внутри помещений, в каналах, туннелях, в местах, не подверженных вибрации, в условиях отсутствия механических воздействий на кабель..
- в земле (траншеях), если кабель не подвергается значительным растягивающим усилиям
Строительная длина кабелей должна быть не менее 125 м. Допускаются маломерные отрезки длиной не менее 20 м в количестве не более 10 % от общей длины сдаваемой партии кабелей.
[ ГОСТ 433-73]
... монтажные многожильные кабели с поливинилхлоридной изоляцией и оболочкой, предназначенные для фиксированного межприборного монтажа электрических устройств, работающих при номинальном переменном напряжении до 500 В частоты до 400 Гц или постоянном напряжении до 750 В.
Требования к стойкости при механических воздействиях
- Кабели должны быть механически прочными при воздействии вибрационных нагрузок в диапазоне частот 1-5000 Гц с ускорением до 392 м/с2 (40 g).
- Кабели должны быть механически прочными при воздействии многократных ударов с ускорением 1471 м/с2 (150 g) при длительности удара 1-3 мс.
- Кабели должны быть механически прочными при воздействии одиночных ударов с ускорением 9810 м/с2(1000 g) и линейных нагрузок с ускорением до 4905 м/с2 (500 g).
Требования к стойкости при климатических воздействиях
-Кабели должны быть стойкими к воздействию повышенной температуры 343 К (70°С), при этом за повышенную температуру принимают температуру наиболее нагреваемого элемента конструкции кабеля.
- Кабели должны быть стойкими к воздействию пониженной температуры - 223 К (минус 50°С).
- Кабели должны быть стойкими к воздействию относительной влажности воздуха до 98 % при температуре 308 К (35°С).
- Кабели климатического исполнения Т должны быть стойкими к воздействию плесневых грибов.
[ ГОСТ 10348-80]
Тематики
- кабели, провода...
Классификация
>>>Обобщающие термины
Действия
- вводить кабель в отверстие
- вводить кабель в эксплуатацию
- наматывать кабель на барабан
- подключать кабель
- присоединять кабель
- прокладывать кабель
Синонимы
Сопутствующие термины
- неподвижная прокладка
- прокладка кабеля
- прокладка кабеля в земляной траншее
- прокладка кабеля непосредственно в грунте
- фиксированный межприборный монтаж электрических устройств
EN
DE
FR
Франко-русский словарь нормативно-технической терминологии > câble électrique
49 automate programmable à mémoire
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Франко-русский словарь нормативно-технической терминологии > automate programmable à mémoire
50 déclencheur thermique de surcharge
тепловой расцепитель
Расцепитель, срабатывание которого зависит от теплового действия тока, проходящего через него.
[ ГОСТ 17703-72]EN
thermal release
device which prevents the maintenance of excessively high temperatures in certain parts of the apparatus by disconnecting these parts from their supply
NOTE PTC thermistors (see 2.7.8) are not thermal releases in the sense of this definition
[IEC 60065, ed. 7.0 (2001-12)]
thermal overload release inverse time-delay overload release depending for its operation, including its time delay, on the thermal action of the current flowing in the release
[IEC 60934, ed. 3.0 (2000-10)]FR
limiteur de température
dispositif destiné à empêcher le maintien de températures excessives dans certaines parties de l'appareil, en mettant ces parties hors tension
[IEC 60065, ed. 7.0 (2001-12)]
déclencheur thermique de surcharge déclencheur de surcharge à temps inverse dont le fonctionnement, y compris la temporisation, dépend de l'action thermique du courant qui traverse le déclencheur
[IEC 60934, ed. 3.0 (2000-10)]
В состав теплового расцепителя входит биметаллическая пластина, которая при нагреве выше определенной температуры изгибается, освобождая устройство, удерживающее главные контакты. Быстродействие биметаллической пластины прямо пропорционально значению протекающего через расцепитель тока. Тепловой расцепитель характеризуется тепловой инерцией, и после замыкания сработавшего автоматического выключателя время следующего срабатывания расцепителя уменьшается. В регулируемых расцепителях ток срабатывания можно установить в диапазоне от 0,4 до 1,0 от номинального тока.Тематики
- выключатель автоматический
- расцепитель, тепловое реле
Классификация
>>>EN
FR
Франко-русский словарь нормативно-технической терминологии > déclencheur thermique de surcharge
51 Elektrokabel
электрический кабель
кабель
Кабельное изделие, содержащее одну или более изолированных жил (проводников), заключенных в металлическую или неметаллическую оболочку, поверх которой в зависимости от условий прокладки и эксплуатации может иметься соответствующий защитный покров, в который может входить броня, и пригодное, в частности, для прокладки в земле и под водой.
[ ГОСТ 15845-80]
кабель
1. Одна или несколько изолированных токопроводящих жил или проводников, заключённых в герметическую оболочку с верхним защитным покрытием
2. Гибкий несущий элемент висячих систем, кабель-кранов и канатных подвесных дорог
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]
кабель электрический
Кабель 1. для передачи на расстояние электрической энергии либо сигналов высокого или низкого напряжений
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]
кабель
Один или несколько скрученных изолированных гибких проводников, предназначенных для обматывания объектов контроля в целях их продольного или тороидного намагничивания.
кабель
Экранированный проводник, соединяющий электронный блок с преобразователем или электронные блоки между собой
кабель
-
[IEV number 151-12-38]EN
cable
assembly of one or more conductors and/or optical fibres, with a protective covering and possibly filling, insulating and protective material
[IEV number 151-12-38]FR
câble, m
assemblage d'un ou plusieurs conducteurs ou fibres optiques, muni d'une enveloppe protectrice et éventuellement de matériaux de remplissage, d'isolation et de protection
[IEV number 151-12-38]
Пример конструкции кабеля:
1 - Токопроводящие жилы;
2 - Бумага, пропитанная маслом;
3 - Джутовый заполнитель;
4 - Свинцовая оболочка;
5 - Бумажная лента;
6 - Прослойка из джута;
7 - Стальная ленточная броня;
8 - Джутовый покров.
Кабели на напряжение до 1 кВ и выше...
[ГОСТ 12.2.007.14-75]
... силовые кабели с медными или алюминиевыми жилами с резиновой изоляцией, в свинцовой, поливинилхлоридной или резиновой оболочке, с защитными покровами или без них, предназначенные для неподвижной прокладки в электрических сетях напряжением 660 В переменного тока частотой 50 Гц или 1000 В постоянного тока и на напряжение 3000, 6000 и 10000 В постоянного тока.
Кабели предназначены для прокладки:
- на трассах с неограниченной разностью уровней.
- внутри помещений, в каналах, туннелях, в местах, не подверженных вибрации, в условиях отсутствия механических воздействий на кабель..
- в земле (траншеях), если кабель не подвергается значительным растягивающим усилиям
Строительная длина кабелей должна быть не менее 125 м. Допускаются маломерные отрезки длиной не менее 20 м в количестве не более 10 % от общей длины сдаваемой партии кабелей.
[ ГОСТ 433-73]
... монтажные многожильные кабели с поливинилхлоридной изоляцией и оболочкой, предназначенные для фиксированного межприборного монтажа электрических устройств, работающих при номинальном переменном напряжении до 500 В частоты до 400 Гц или постоянном напряжении до 750 В.
Требования к стойкости при механических воздействиях
- Кабели должны быть механически прочными при воздействии вибрационных нагрузок в диапазоне частот 1-5000 Гц с ускорением до 392 м/с2 (40 g).
- Кабели должны быть механически прочными при воздействии многократных ударов с ускорением 1471 м/с2 (150 g) при длительности удара 1-3 мс.
- Кабели должны быть механически прочными при воздействии одиночных ударов с ускорением 9810 м/с2(1000 g) и линейных нагрузок с ускорением до 4905 м/с2 (500 g).
Требования к стойкости при климатических воздействиях
-Кабели должны быть стойкими к воздействию повышенной температуры 343 К (70°С), при этом за повышенную температуру принимают температуру наиболее нагреваемого элемента конструкции кабеля.
- Кабели должны быть стойкими к воздействию пониженной температуры - 223 К (минус 50°С).
- Кабели должны быть стойкими к воздействию относительной влажности воздуха до 98 % при температуре 308 К (35°С).
- Кабели климатического исполнения Т должны быть стойкими к воздействию плесневых грибов.
[ ГОСТ 10348-80]
Тематики
- кабели, провода...
Классификация
>>>Обобщающие термины
Действия
- вводить кабель в отверстие
- вводить кабель в эксплуатацию
- наматывать кабель на барабан
- подключать кабель
- присоединять кабель
- прокладывать кабель
Синонимы
Сопутствующие термины
- неподвижная прокладка
- прокладка кабеля
- прокладка кабеля в земляной траншее
- прокладка кабеля непосредственно в грунте
- фиксированный межприборный монтаж электрических устройств
EN
DE
FR
Немецко-русский словарь нормативно-технической терминологии > Elektrokabel
52 Kabel
электрический кабель
кабель
Кабельное изделие, содержащее одну или более изолированных жил (проводников), заключенных в металлическую или неметаллическую оболочку, поверх которой в зависимости от условий прокладки и эксплуатации может иметься соответствующий защитный покров, в который может входить броня, и пригодное, в частности, для прокладки в земле и под водой.
[ ГОСТ 15845-80]
кабель
1. Одна или несколько изолированных токопроводящих жил или проводников, заключённых в герметическую оболочку с верхним защитным покрытием
2. Гибкий несущий элемент висячих систем, кабель-кранов и канатных подвесных дорог
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]
кабель электрический
Кабель 1. для передачи на расстояние электрической энергии либо сигналов высокого или низкого напряжений
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]
кабель
Один или несколько скрученных изолированных гибких проводников, предназначенных для обматывания объектов контроля в целях их продольного или тороидного намагничивания.
кабель
Экранированный проводник, соединяющий электронный блок с преобразователем или электронные блоки между собой
кабель
-
[IEV number 151-12-38]EN
cable
assembly of one or more conductors and/or optical fibres, with a protective covering and possibly filling, insulating and protective material
[IEV number 151-12-38]FR
câble, m
assemblage d'un ou plusieurs conducteurs ou fibres optiques, muni d'une enveloppe protectrice et éventuellement de matériaux de remplissage, d'isolation et de protection
[IEV number 151-12-38]
Пример конструкции кабеля:
1 - Токопроводящие жилы;
2 - Бумага, пропитанная маслом;
3 - Джутовый заполнитель;
4 - Свинцовая оболочка;
5 - Бумажная лента;
6 - Прослойка из джута;
7 - Стальная ленточная броня;
8 - Джутовый покров.
Кабели на напряжение до 1 кВ и выше...
[ГОСТ 12.2.007.14-75]
... силовые кабели с медными или алюминиевыми жилами с резиновой изоляцией, в свинцовой, поливинилхлоридной или резиновой оболочке, с защитными покровами или без них, предназначенные для неподвижной прокладки в электрических сетях напряжением 660 В переменного тока частотой 50 Гц или 1000 В постоянного тока и на напряжение 3000, 6000 и 10000 В постоянного тока.
Кабели предназначены для прокладки:
- на трассах с неограниченной разностью уровней.
- внутри помещений, в каналах, туннелях, в местах, не подверженных вибрации, в условиях отсутствия механических воздействий на кабель..
- в земле (траншеях), если кабель не подвергается значительным растягивающим усилиям
Строительная длина кабелей должна быть не менее 125 м. Допускаются маломерные отрезки длиной не менее 20 м в количестве не более 10 % от общей длины сдаваемой партии кабелей.
[ ГОСТ 433-73]
... монтажные многожильные кабели с поливинилхлоридной изоляцией и оболочкой, предназначенные для фиксированного межприборного монтажа электрических устройств, работающих при номинальном переменном напряжении до 500 В частоты до 400 Гц или постоянном напряжении до 750 В.
Требования к стойкости при механических воздействиях
- Кабели должны быть механически прочными при воздействии вибрационных нагрузок в диапазоне частот 1-5000 Гц с ускорением до 392 м/с2 (40 g).
- Кабели должны быть механически прочными при воздействии многократных ударов с ускорением 1471 м/с2 (150 g) при длительности удара 1-3 мс.
- Кабели должны быть механически прочными при воздействии одиночных ударов с ускорением 9810 м/с2(1000 g) и линейных нагрузок с ускорением до 4905 м/с2 (500 g).
Требования к стойкости при климатических воздействиях
-Кабели должны быть стойкими к воздействию повышенной температуры 343 К (70°С), при этом за повышенную температуру принимают температуру наиболее нагреваемого элемента конструкции кабеля.
- Кабели должны быть стойкими к воздействию пониженной температуры - 223 К (минус 50°С).
- Кабели должны быть стойкими к воздействию относительной влажности воздуха до 98 % при температуре 308 К (35°С).
- Кабели климатического исполнения Т должны быть стойкими к воздействию плесневых грибов.
[ ГОСТ 10348-80]
Тематики
- кабели, провода...
Классификация
>>>Обобщающие термины
Действия
- вводить кабель в отверстие
- вводить кабель в эксплуатацию
- наматывать кабель на барабан
- подключать кабель
- присоединять кабель
- прокладывать кабель
Синонимы
Сопутствующие термины
- неподвижная прокладка
- прокладка кабеля
- прокладка кабеля в земляной траншее
- прокладка кабеля непосредственно в грунте
- фиксированный межприборный монтаж электрических устройств
EN
DE
FR
кабельная линия электропередачи
Линия электропередачи, выполненная одним или несколькими кабелями, уложенными непосредственно в землю, кабельные каналы, трубы, на кабельные конструкции.
[ ГОСТ 24291-90]
линия электропередачи кабельная
Линия электропередачи, состоящая из одного или нескольких параллельных электрических кабелей
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]
кабельная линия электропередачи
КЛ
Линия для передачи электроэнергии или отдельных импульсов ее, состоящая из одного или нескольких параллельных кабелей с соединительными, стопорными и концевыми муфтами (заделками) и крепежными деталями, а для маслонаполненных кабельных линий, кроме того, с подпитывающими аппаратами и системой сигнализации давления масла.
[ Правила технической эксплуатации электроустановок потребителей]EN
underground cable
an electric line with insulated conductors buried directly in the ground, or laid in cable ducts, pipes, troughs, etc
NOTE – The same expression is used to describe the item physically.
[IEV number 601-03-05]FR
ligne souterraine
ligne électrique à conducteurs isolés disposée dans le sol, soit directement enterrée, soit placée dans une galerie, des tuyaux, des caniveaux, etc
[IEV number 601-03-05]Тематики
Синонимы
- КЛ
EN
DE
FR
52 кабельная линия электропередачи; КЛ
Линия электропередачи; выполненная одним или несколькими кабелями, уложенными непосредственно в землю, кабельные каналы, трубы, на кабельные конструкции
601-03-05
de Kabel
en underground cable
fr ligne souterraine
Источник: ГОСТ 24291-90: Электрическая часть электростанции и электрической сети. Термины и определения оригинал документа
Немецко-русский словарь нормативно-технической терминологии > Kabel
53 speicherprogrammierbare Steuerung, f
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Немецко-русский словарь нормативно-технической терминологии > speicherprogrammierbare Steuerung, f
54 артемия
артемия
Мелкое (до 1 см) примитивное ракообразное отряда жаброногов (Branchipoda), встречается в солоноватых внутренних водоемах, в морских лиманах; А. способны жить в очень широком диапазоне солёности; во многих случаях образуются партеногенетические клоны (5n и выше), иногда выделяемые в самостоятельный вид Artemia parthenogenetica.
[Арефьев В.А., Лисовенко Л.А. Англо-русский толковый словарь генетических терминов 1995 407с.]Тематики
EN
Русско-английский словарь нормативно-технической терминологии > артемия
55 быстрые нейтроны
быстрые нейтроны
Нейтроны, кинетическая энергия которых выше некоторой определенной величины. Эта величина может меняться в широком диапазоне и зависит от применения (физика реакторов, защита или дозиметрия). В физике реакторов эта величина чаще всего выбирается равной 0,1 МэВ.
[ http://pripyat.forumbb.ru/viewtopic.php?id=25]Тематики
EN
Русско-английский словарь нормативно-технической терминологии > быстрые нейтроны
56 ИБП для централизованных систем питания
ИБП для централизованных систем питания
ИБП для централизованного питания нагрузок
-
[Интент]ИБП для централизованных систем питания
А. П. Майоров
Для многих предприятий всесторонняя защита данных имеет жизненно важное значение. Кроме того, есть виды деятельности, в которых прерывания подачи электроэнергии не допускаются даже на доли секунды. Так работают расчетные центры банков, больницы, аэропорты, центры обмена трафиком между различными сетями. В такой же степени критичны к электропитанию телекоммуникационное оборудование, крупные узлы Интернет, число ежедневных обращений к которым исчисляется десятками и сотнями тысяч. Третья часть обзора по ИБП посвящена оборудованию, предназначенному для обеспечения питания особо важных объектов.
Централизованные системы бесперебойного питания применяют в тех случаях, когда прерывание подачи электроэнергии недопустимо для работы большинства единиц оборудования, составляющих одну информационную или технологическую систему. Как правило, проблемы питания рассматривают в рамках единого проекта наряду со многими другими подсистемами здания, поскольку они требуют вложения значительных средств и увязки с силовой электропроводкой, коммутационным электрооборудованием и аппаратурой кондиционирования. Изначально системы бесперебойного питания рассчитаны на долгие годы эксплуатации, их срок службы можно сравнить со сроком службы кабельных подсистем здания и основного компьютерного оборудования. За 15—20 лет функционирования предприятия оснащение его рабочих станций обновляется три-четыре раза, несколько раз изменяется планировка помещений и производится их ремонт, но все эти годы система бесперебойного питания должна работать безотказно. Для ИБП такого класса долговечность превыше всего, поэтому в их технических спецификациях часто приводят значение важнейшего технического показателя надежности — среднего времени наработки на отказ (Mean Time Before Failure — MTBF). Во многих моделях с ИБП оно превышает 100 тыс. ч, в некоторых из них достигает 250 тыс. ч (т. е. 27 лет непрерывной работы). Правда, сравнивая различные системы, нужно учитывать условия, для которых этот показатель задан, и к предоставленным цифрам относиться осторожно, поскольку условия работы оборудования разных производителей неодинаковы.
Батареи аккумуляторов
К сожалению, наиболее дорогостоящий компонент ИБП — батарея аккумуляторов так долго работать не может. Существует несколько градаций качества батарей, которые различаются сроком службы и, естественно, ценой. В соответствии с принятой два года назад конвенцией EUROBAT по среднему сроку службы батареи разделены на четыре группы:
10+ — высоконадежные,
10 — высокоэффективные,
5—8 — общего назначения,
3—5 — стандартные коммерческие.Учитывая исключительно жесткую конкуренцию на рынке ИБП малой мощности, производители стремятся снизить до минимума начальную стоимость своих моделей, поэтому часто комплектуют их самыми простыми батареями. Применительно к этой группе продуктов такой подход оправдан, поскольку упрощенные ИБП изымают из обращения вместе с защищаемыми ими персональными компьютерами. Впервые вступающие на этот рынок производители, пытаясь оттеснить конкурентов, часто используют в своих интересах неосведомленность покупателей о проблеме качества батарей и предлагают им сравнимые по остальным показателям модели за более низкую цену. Имеются случаи, когда партнеры крупной фирмы комплектуют ее проверенные временем и признанные рынком модели ИБП батареями, произведенными в развивающихся странах, где контроль за технологическим процессом ослаблен, а, значит, срок службы батарей меньше по сравнению с "кондиционными" изделиями. Поэтому, подбирая для себя ИБП, обязательно поинтересуйтесь качеством батареи и ее производителем, избегайте продукции неизвестных фирм. Следование этим рекомендациям сэкономит вам значительные средства при эксплуатации ИБП.
Все сказанное еще в большей степени относится к ИБП высокой мощности. Как уже отмечалось, срок службы таких систем исчисляется многими годами. И все же за это время приходится несколько раз заменять батареи. Как это ни покажется странным, но расчеты, основанные на ценовых и качественных параметрах батарей, показывают, что в долгосрочной перспективе наиболее выгодны именно батареи высшего качества, несмотря на их первоначальную стоимость. Поэтому, имея возможность выбора, устанавливайте батареи только "высшей пробы". Гарантированный срок службы таких батарей приближается к 15 годам.
Не менее важный аспект долговечности мощных систем бесперебойного питания — условия эксплуатации аккумуляторных батарей. Чтобы исключить непредсказуемые, а следовательно, часто приводящие к аварии перерывы в подаче электропитания, абсолютно все включенные в приведенную в статье таблицу модели оснащены самыми совершенными схемами контроля за состоянием батарей. Не мешая выполнению основной функции ИБП, схемы мониторинга, как правило, контролируют следующие параметры батареи: зарядный и разрядный токи, возможность избыточного заряда, рабочую температуру, емкость.
Кроме того, с их помощью рассчитываются такие переменные, как реальное время автономной работы, конечное напряжение зарядки в зависимости от реальной температуры внутри батареи и др.
Подзарядка батареи происходит по мере необходимости и в наиболее оптимальном режиме для ее текущего состояния. Когда емкость батареи снижается ниже допустимого предела, система контроля автоматически посылает предупреждающий сигнал о необходимости ее скорой замены.
Топологические изыски
Долгое время специалисты по системам электропитания руководствовались аксиомой, что мощные системы бесперебойного питания должны иметь топологию on-line. Считается, что именно такая топология гарантирует защиту от всех нарушений на линиях силового питания, позволяет фильтровать помехи во всем частотном диапазоне, обеспечивает на выходе чистое синусоидальное напряжение с номинальными параметрами. Однако за качество электропитания приходится платить повышенным выделением тепловой энергии, сложностью электронных схем, а следовательно, потенциальным снижением надежности. Но, несмотря на это, за многолетнюю историю выпуска мощных ИБП были разработаны исключительно надежные аппараты, способные работать в самых невероятных условиях, когда возможен отказ одного или даже нескольких узлов одновременно. Наиболее важным и полезным элементом мощных ИБП является так называемый байпас. Это обходной путь подачи энергии на выход в случае ремонтных и профилактических работ, вызванных отказом некоторых компонентов систем или возникновением перегрузки на выходе. Байпасы бывают ручными и автоматическими. Они формируются несколькими переключателями, поэтому для их активизации требуется некоторое время, которое инженеры постарались снизить до минимума. И раз уж такой переключатель был создан, то почему бы не использовать его для снижения тепловыделения в то время, когда питающая сеть пребывает в нормальном рабочем состоянии. Так появились первые признаки отступления от "истинного" режима on-line.
Новая топология отдаленно напоминает линейно-интерактивную. Устанавливаемый пользователем системы порог срабатывания определяет момент перехода системы в так называемый экономный режим. При этом напряжение из первичной сети поступает на выход системы через байпас, однако электронная схема постоянно следит за состоянием первичной сети и в случае недопустимых отклонений мгновенно переключается на работу в основном режиме on-line.
Подобная схема применена в ИБП серии Synthesis фирмы Chloride (Сети и системы связи, 1996. № 10. С. 131), механизм переключения в этих устройствах назван "интеллектуальным" ключом. Если качество входной линии укладывается в пределы, определяемые самим пользователем системы, аппарат работает в линейно-интерактивном режиме. При достижении одним из контролируемых параметров граничного значения система начинает работать в нормальном режиме on-line. Конечно, в этом режиме система может работать и постоянно.
За время эксплуатации системы отход от исходной аксиомы позволяет экономить весьма значительные средства за счет сокращения тепловыделения. Сумма экономии оказывается сопоставимой со стоимостью оборудования.
Надо отметить, что от своих исходных принципов отошла еще одна фирма, ранее выпускавшая только линейно-интерактивные ИБП и ИБП типа off-line сравнительно небольшой мощности. Теперь она превысила прежний верхний предел мощности своих ИБП (5 кВА) и построила новую систему по топологии on-line. Я имею в виду фирму АРС и ее массив электропитания Simmetra (Сети и системы связи. 1997. № 4. С. 132). Создатели попытались заложить в систему питания те же принципы повышения надежности, которые применяют при построении особо надежной компьютерной техники. В модульную конструкцию введена избыточность по отношению к управляющим модулям и батареям. В любом из трех выпускаемых шасси из отдельных модулей можно сформировать нужную на текущий момент систему и в будущем наращивать ее по мере надобности. Суммарная мощность самого большого шасси достигает 16 кВА. Еще рано сравнивать эту только что появившуюся систему с другими включенными в таблицу. Однако факт появления нового продукта в этом исключительно устоявшемся секторе рынка сам по себе интересен.
Архитектура
Суммарная выходная мощность централизованных систем бесперебойного питания может составлять от 10—20 кВА до 200—300 МВА и более. Соответственно видоизменяется и структура систем. Как правило, она включают в себя несколько источников, соединенных параллельно тем или иным способом. Аппаратные шкафы устанавливают в специально оборудованных помещениях, где уже находятся распределительные шкафы выходного напряжения и куда подводят мощные входные силовые линии электропитания. В аппаратных помещениях поддерживается определенная температура, а за функционированием оборудования наблюдают специалисты.
Многие реализации системы питания для достижения необходимой надежности требуют совместной работы нескольких ИБП. Существует ряд конфигураций, где работают сразу несколько блоков. В одних случаях блоки можно добавлять постепенно, по мере необходимости, а в других — системы приходится комплектовать в самом начале проекта.
Для повышения суммарной выходной мощности используют два варианта объединения систем: распределенный и централизованный. Последний обеспечивает более высокую надежность, но первый более универсален. Блоки серии EDP-90 фирмы Chloride допускают объединение двумя способами: и просто параллельно (распределенный вариант), и с помощью общего распределительного блока (централизованный вариант). При выборе способа объединения отдельных ИБП необходим тщательный анализ структуры нагрузки, и в этом случае лучше всего обратиться за помощью к специалистам.
Применяют параллельное соединение блоков с централизованным байпасом, которое используют для повышения общей надежности или увеличения общей выходной мощности. Число объединяемых блоков не должно превышать шести. Существуют и более сложные схемы с избыточностью. Так, например, чтобы исключить прерывание подачи питания во время профилактических и ремонтных работ, соединяют параллельно несколько блоков с подключенными к отдельному ИБП входными линиями байпасов.
Особо следует отметить сверхмощные ИБП серии 3000 фирмы Exide. Суммарная мощность системы питания, построенная на модульных элементах этой серии, может достигать нескольких миллионов вольт-ампер, что сравнимо с номинальной мощностью генераторов некоторых электростанций. Все компоненты серии 3000 без исключения построены на модульном принципе. На их основе можно создать особо мощные системы питания, в точности соответствующие исходным требованиям. В процессе эксплуатации суммарную мощность систем можно наращивать по мере увеличения нагрузки. Однако следует признать, что систем бесперебойного питания такой мощности в мире не так уж много, их строят по специальным контрактам. Поэтому серия 3000 не включена в общую таблицу. Более подробные данные о ней можно получить на Web-узле фирмы Exide по адресу http://www.exide.com или в ее московском представительстве.
Важнейшие параметры
Для систем с высокой выходной мощностью очень важны показатели, которые для менее мощных систем не имеют первостепенного значения. Это, например, КПД — коэффициент полезного действия (выражается либо действительным числом меньше единицы, либо в процентах), показывающий, какая часть активной входной мощности поступает к нагрузке. Разница значений входной и выходной мощности рассеивается в виде тепла. Чем выше КПД, тем меньше тепловой энергии выделяется в аппаратной комнате и, значит, для поддержания нормальных рабочих условий требуется менее мощная система кондиционирования.
Чтобы представить себе, о каких величинах идет речь, рассчитаем мощность, "распыляемую" ИБП с номинальным значением на выходе 8 МВт и с КПД, равным 95%. Такая система будет потреблять от первичной силовой сети 8,421 МВт — следовательно, превращать в тепло 0,421 МВт или 421 кВт. При повышении КПД до 98% при той же выходной мощности рассеиванию подлежат "всего" 163 кВт. Напомним, что в данном случае нужно оперировать активными мощностями, измеряемыми в ваттах.
Задача поставщиков электроэнергии — подавать требуемую мощность ее потребителям наиболее экономным способом. Как правило, в цепях переменного тока максимальные значения напряжения и силы тока из-за особенностей нагрузки не совпадают. Из-за этого смещения по фазе снижается эффективность доставки электроэнергии, поскольку при передаче заданной мощности по линиям электропередач, через трансформаторы и прочие элементы систем протекают токи большей силы, чем в случае отсутствия такого смещения. Это приводит к огромным дополнительным потерям энергии, возникающим по пути ее следования. Степень сдвига по фазе измеряется не менее важным, чем КПД, параметром систем питания — коэффициентом мощности.
Во многих странах мира существуют нормы на допустимое значение коэффициента мощности систем питания и тарифы за электроэнергию нередко зависят от коэффициента мощности потребителя. Суммы штрафов за нарушение нормы оказываются настольно внушительными, что приходится заботиться о повышении коэффициента мощности. С этой целью в ИБП встраивают схемы, которые компенсируют сдвиг по фазе и приближают значение коэффициента мощности к единице.
На распределительную силовую сеть отрицательно влияют и нелинейные искажения, возникающие на входе блоков ИБП. Почти всегда их подавляют с помощью фильтров. Однако стандартные фильтры, как правило, уменьшают искажения только до уровня 20—30%. Для более значительного подавления искажений на входе систем ставят дополнительные фильтры, которые, помимо снижения величины искажений до нескольких процентов, повышают коэффициент мощности до 0,9—0,95. С 1998 г. встраивание средств компенсации сдвига по фазе во все источники электропитания компьютерной техники в Европе становится обязательным.
Еще один важный параметр мощных систем питания — уровень шума, создаваемый такими компонентами ИБП, как, например, трансформаторы и вентиляторы, поскольку их часто размещают вместе в одном помещении с другим оборудованием — там где работает и персонал.
Чтобы представить себе, о каких значениях интенсивности шума идет речь, приведем для сравнения такие примеры: уровень шума, производимый шелестом листвы и щебетанием птиц, равен 40 дБ, уровень шума на центральной улице большого города может достигать 80 дБ, а взлетающий реактивный самолет создает шум около 100 дБ.
Достижения в электронике
Мощные системы бесперебойного электропитания выпускаются уже более 30 лет. За это время бесполезное тепловыделение, объем и масса их сократились в несколько раз. Во всех подсистемах произошли и значительные технологические изменения. Если раньше в инверторах использовались ртутные выпрямители, а затем кремниевые тиристоры и биполярные транзисторы, то теперь в них применяются высокоскоростные мощные биполярные транзисторы с изолированным затвором (IGBT). В управляющих блоках аналоговые схемы на дискретных компонентах сначала были заменены на цифровые микросхемы малой степени интеграции, затем — микропроцессорами, а теперь в них установлены цифровые сигнальные процессоры (Digital Signal Processor — DSP).
В системах питания 60-х годов для индикации их состояния использовались многочисленные аналоговые измерительные приборы. Позднее их заменили более надежными и информативными цифровыми панелями из светоизлучающих диодов и жидкокристаллических индикаторов. В наше время повсеместно используют программное управление системами питания.
Еще большее сокращение тепловых потерь и общей массы ИБП дает замена массивных трансформаторов, работающих на частоте промышленной сети (50 или 60 Гц), высокочастотными трансформаторами, работающими на ультразвуковых частотах. Между прочим, высокочастотные трансформаторы давно применяются во внутренних источниках питания компьютеров, а вот в ИБП их стали устанавливать сравнительно недавно. Применение IGBT-приборов позволяет строить и бестрансформаторные инверторы, при этом внутреннее построение ИБП существенно меняется. Два последних усовершенствования применены в ИБП серии Synthesis фирмы Chloride, отличающихся уменьшенным объемом и массой.
Поскольку электронная начинка ИБП становится все сложнее, значительную долю их внутреннего объема теперь занимают процессорные платы. Для радикального уменьшения суммарной площади плат и изоляции их от вредных воздействий электромагнитных полей и теплового излучения используют электронные компоненты для так называемой технологии поверхностного монтажа (Surface Mounted Devices — SMD) — той самой, которую давно применяют в производстве компьютеров. Для защиты электронных и электротехнических компонентов имеются специальные внутренние экраны.
***
Со временем серьезный системный подход к проектированию материальной базы предприятия дает значительную экономию не только благодаря увеличению срока службы всех компонентов "интегрированного интеллектуального" здания, но и за счет сокращения расходов на электроэнергию и текущее обслуживание. Использование централизованных систем бесперебойного питания в пересчете на стоимость одного рабочего места дешевле, чем использование маломощных ИБП для рабочих станций и даже ИБП для серверных комнат. Однако, чтобы оценить это, нужно учесть все факторы установки таких систем.
Предположим, что предприятие свое помещение арендует. Тогда нет никакого смысла разворачивать дорогостоящую систему централизованного питания. Если через пять лет руководство предприятия не намерено заниматься тем же, чем занимается сегодня, то даже ИБП для серверных комнат обзаводиться нецелесообразно. Но если оно рассчитывает на то, что производство будет держаться на плаву долгие годы и решило оснастить принадлежащее им здание системой бесперебойного питания, то для выбора такой системы нужно воспользоваться услугами специализированных фирм. Сейчас их немало и в России. От этих же фирм можно получить информацию о так называемых системах гарантированного электропитания, в которые включены дизельные электрогенераторы и прочие, более экзотические источники энергии.
Нам же осталось рассмотреть лишь методы управления ИБП, что мы и сделаем в одном из следующих номеров нашего журнала
[ http://www.ccc.ru/magazine/depot/97_07/read.html?0502.htm]Тематики
Синонимы
EN
Русско-английский словарь нормативно-технической терминологии > ИБП для централизованных систем питания
57 кабель
электрический кабель
кабель
Кабельное изделие, содержащее одну или более изолированных жил (проводников), заключенных в металлическую или неметаллическую оболочку, поверх которой в зависимости от условий прокладки и эксплуатации может иметься соответствующий защитный покров, в который может входить броня, и пригодное, в частности, для прокладки в земле и под водой.
[ ГОСТ 15845-80]
кабель
1. Одна или несколько изолированных токопроводящих жил или проводников, заключённых в герметическую оболочку с верхним защитным покрытием
2. Гибкий несущий элемент висячих систем, кабель-кранов и канатных подвесных дорог
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]
кабель электрический
Кабель 1. для передачи на расстояние электрической энергии либо сигналов высокого или низкого напряжений
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]
кабель
Один или несколько скрученных изолированных гибких проводников, предназначенных для обматывания объектов контроля в целях их продольного или тороидного намагничивания.
кабель
Экранированный проводник, соединяющий электронный блок с преобразователем или электронные блоки между собой
кабель
-
[IEV number 151-12-38]EN
cable
assembly of one or more conductors and/or optical fibres, with a protective covering and possibly filling, insulating and protective material
[IEV number 151-12-38]FR
câble, m
assemblage d'un ou plusieurs conducteurs ou fibres optiques, muni d'une enveloppe protectrice et éventuellement de matériaux de remplissage, d'isolation et de protection
[IEV number 151-12-38]
Пример конструкции кабеля:
1 - Токопроводящие жилы;
2 - Бумага, пропитанная маслом;
3 - Джутовый заполнитель;
4 - Свинцовая оболочка;
5 - Бумажная лента;
6 - Прослойка из джута;
7 - Стальная ленточная броня;
8 - Джутовый покров.
Кабели на напряжение до 1 кВ и выше...
[ГОСТ 12.2.007.14-75]
... силовые кабели с медными или алюминиевыми жилами с резиновой изоляцией, в свинцовой, поливинилхлоридной или резиновой оболочке, с защитными покровами или без них, предназначенные для неподвижной прокладки в электрических сетях напряжением 660 В переменного тока частотой 50 Гц или 1000 В постоянного тока и на напряжение 3000, 6000 и 10000 В постоянного тока.
Кабели предназначены для прокладки:
- на трассах с неограниченной разностью уровней.
- внутри помещений, в каналах, туннелях, в местах, не подверженных вибрации, в условиях отсутствия механических воздействий на кабель..
- в земле (траншеях), если кабель не подвергается значительным растягивающим усилиям
Строительная длина кабелей должна быть не менее 125 м. Допускаются маломерные отрезки длиной не менее 20 м в количестве не более 10 % от общей длины сдаваемой партии кабелей.
[ ГОСТ 433-73]
... монтажные многожильные кабели с поливинилхлоридной изоляцией и оболочкой, предназначенные для фиксированного межприборного монтажа электрических устройств, работающих при номинальном переменном напряжении до 500 В частоты до 400 Гц или постоянном напряжении до 750 В.
Требования к стойкости при механических воздействиях
- Кабели должны быть механически прочными при воздействии вибрационных нагрузок в диапазоне частот 1-5000 Гц с ускорением до 392 м/с2 (40 g).
- Кабели должны быть механически прочными при воздействии многократных ударов с ускорением 1471 м/с2 (150 g) при длительности удара 1-3 мс.
- Кабели должны быть механически прочными при воздействии одиночных ударов с ускорением 9810 м/с2(1000 g) и линейных нагрузок с ускорением до 4905 м/с2 (500 g).
Требования к стойкости при климатических воздействиях
-Кабели должны быть стойкими к воздействию повышенной температуры 343 К (70°С), при этом за повышенную температуру принимают температуру наиболее нагреваемого элемента конструкции кабеля.
- Кабели должны быть стойкими к воздействию пониженной температуры - 223 К (минус 50°С).
- Кабели должны быть стойкими к воздействию относительной влажности воздуха до 98 % при температуре 308 К (35°С).
- Кабели климатического исполнения Т должны быть стойкими к воздействию плесневых грибов.
[ ГОСТ 10348-80]
Тематики
- кабели, провода...
Классификация
>>>Обобщающие термины
Действия
- вводить кабель в отверстие
- вводить кабель в эксплуатацию
- наматывать кабель на барабан
- подключать кабель
- присоединять кабель
- прокладывать кабель
Синонимы
Сопутствующие термины
- неподвижная прокладка
- прокладка кабеля
- прокладка кабеля в земляной траншее
- прокладка кабеля непосредственно в грунте
- фиксированный межприборный монтаж электрических устройств
EN
DE
FR
Русско-английский словарь нормативно-технической терминологии > кабель
58 классы отходов
классы отходов
При построении системы классификации были приняты во внимание вопросы, которые представляются наиболее важными с точки зрения безопасности захоронения. В настоящее время исследуется ряд проблем, связанных с классификацией отходов. Иногда, например, в национальных системах классификации используются другие классы, которые указаны ниже (в квадратных скобках); эти классы приведены здесь с целью показать, как они в типичном случае соотносятся с классами, указанными в [45]. В других системах отходы классифицируются на основе других принципов, например, по их происхождению (отходы от эксплуатации реактора, отходы переработки, отходы, образующиеся в процессе снятия с эксплуатации, и оборонные отходы). Высокоактивные отходы (ВАО) {high level waste (HLW)} - радиоактивная жидкость, содержащая большую часть продуктов деления и актинидов, присутствующих в отработавшем топливе, которая представляет собой остаток от первого цикла экстракции растворителем в процессе переработки, и некоторые связанные с этим потоки отходов; такой материал, образующийся после отверждения; отработавшее топливо (если оно заявляется в качестве отходов); или любые другие отходы с аналогичными радиологическими характеристиками. Типичные характеристики высокоактивных отходов – это теплотворная способность свыше примерно 2 кВт/м3 и концентрации долгоживущих радионуклидов, превышающие ограничения для короткоживущих отходов [45]. Долгоживущие отходы {long lived waste} - радиоактивные отходы, которые содержат значительные уровни радионуклидов с периодом полураспада более 30 лет. Типичные характеристики – это концентрации долгоживущих радионуклидов, превышающие ограничения для короткоживущих отходов [45]. Короткоживущие отходы {short lived waste} - радиоактивные отходы, которые не содержат значительных уровней радионуклидов с периодом полураспада более 30 лет. Типичные характеристики – это ограниченные концентрации долгоживущих радионуклидов (ограничение долгоживущих радионуклидов до 4000 Бк/г в отдельных упаковках отходов и до общего среднего значения 400 Бк/г на упаковку отходов); см. пункты 324 и 325 в [45]. Низкоактивные отходы (НАО) {[low level waste (LLW)]} - см. низко- и среднеактивные отходы (НСАО). Низко- и среднеактивные отходы (НСАО) {low and intermediate level waste (LILW)} - радиоактивные отходы с радиологическими характеристиками, которыми обладают отходы в диапазоне от отходов, на которые распространяется изъятие, до высокоактивных отходов. Они могут быть долгоживущими отходами (НСАО-ДЖ) или короткоживущими отходами (НСАО-КЖ). Типичные характеристики низко- и среднеактивных отходов – это уровни активности выше уровней освобождения от контроля и теплотворная способность ниже приблизительно 2 кВт/м3 [45]. Многие государства подразделяют этот класс по другой схеме, например, на низкоактивные отходы (НАО) {low level waste (LLW)} и среднеактивные отходы (САО) {intermediate level waste (ILW)} или отходы средней активности (ОСА) {medium level waste (MLW)}, часто на основе критериев приемлемости отходов для приповерхностных хранилищ. Эти термины не следует употреблять в публикациях МАГАТЭ без прямо сформулированных определений для целей конкретной публикации. Отходы, на которые распространяется изъятие {exempt waste} - см. отходы. Отходы средней активности (ОСА) {[medium level waste (MLW)]} - см. низко- и среднеактивные отходы (НСАО). Очень низкоактивные отходы (ОНАО) {very low level waste (VLLW)} - радиоактивные отходы, которые регулирующий орган определяет пригодными для разрешенного захоронения при соблюдении определенных условий вместе с обычными отходами в установках, не предназначенных специально для захоронения радиоактивных отходов. Данная категория используется в некоторых государствах-членах; в других государствах она не применяется, поскольку любые виды радиоактивных отходов, каким бы низким не был уровень их активности, нельзя подвергать захоронению таким образом. Среднеактивные отходы (САО) {intermediate level waste (ILW)} - см. низко- и среднеактивные отходы (НСАО). Тепловыделяющие отходы (ТВО) {heat generating waste (HGW)} - радиоактивные отходы, которые являются достаточно радиоактивными для того, чтобы тепло радиоактивного распада значительно увеличивало их температуру и температуру окружающей их среды. На практике тепловыделяющие отходы – это обычно высокоактивные отходы, хотя некоторые виды среднеактивных отходов могут квалифицироваться как тепловыделяющие отходы.
[Глоссарий МАГАТЭ по вопросам безопасности]Тематики
EN
Русско-английский словарь нормативно-технической терминологии > классы отходов
59 программируемый логический контроллер
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-английский словарь нормативно-технической терминологии > программируемый логический контроллер
60 радиолокационный маяк-ответчик
радиолокационный маяк-ответчик
Радиолокационный маяк-ответчик обеспечивает определение местоположения судов, терпящих бедствие, посредством передачи сигналов, которые на экране радиолокационной станции представлены серией точек, расположенных на равном расстоянии друг от друга в радиальном направлении. РЛМО работает в диапазоне 9200 - 9500 МГц. На каждом борту любого пассажирского судна и грузового судна валовой вместимостью 500 рег. тонн и более должны быть, по крайней мере, два РЛМО. На судах валовой вместимости от 300 до 500 рег. тонн должен быть, по крайней мере,один РЛМО. Высота установленной антенны ответчика должна быть, по крайней мере, на 1 метр выше уровня моря. При этом он обеспечивает нормальную работу на расстоянии не менее 5 морских миль при запросе судового радара, антенна которого установлена на высоте 15 метров и не менее 30 морских миль при запросе авиационного радара с мощностью импульса не менее 10 кВт, установленного на борту летательного аппарата, находящегося на высоте 1000 м.
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
Русско-английский словарь нормативно-технической терминологии > радиолокационный маяк-ответчик
СтраницыСм. также в других словарях:
ГОСТ Р МЭК 62127-1-2009: Государственная система обеспечения единства измерений. Параметры полей ультразвуковых. Общие требования к методам измерений и способам описания полей в частотном диапазоне от 0,5 до 40 МГц — Терминология ГОСТ Р МЭК 62127 1 2009: Государственная система обеспечения единства измерений. Параметры полей ультразвуковых. Общие требования к методам измерений и способам описания полей в частотном диапазоне от 0,5 до 40 МГц оригинал документа … Словарь-справочник терминов нормативно-технической документации
СТО 70238424.29.240.10.002-2011: Распределительные устройства электрических станций и подстанций напряжением 35 кВ и выше. Организация эксплуатации и технического обслуживания. Нормы и требования — Терминология СТО 70238424.29.240.10.002 2011: Распределительные устройства электрических станций и подстанций напряжением 35 кВ и выше. Организация эксплуатации и технического обслуживания. Нормы и требования: 3.1.1 биологическая защита :… … Словарь-справочник терминов нормативно-технической документации
СТО 70238424.29.240.10.004-2011: Подстанции напряжением 35 кВ и выше. Организация эксплуатации и технического обслуживания. Нормы и требования — Терминология СТО 70238424.29.240.10.004 2011: Подстанции напряжением 35 кВ и выше. Организация эксплуатации и технического обслуживания. Нормы и требования: 3.1.1 бланк переключений : Оперативный документ, в котором приводится строгая… … Словарь-справочник терминов нормативно-технической документации
Психоакустика — Психоакустика научная дисциплина, изучающая психологические и физиологические особенности восприятия звука человеком. В аспекте сугубо музыкальном, основными задачами психоакустики являются следующие: понять, как система слухового… … Википедия
Astro-H — Логотип Рентгеновский космический телескоп Astro H (предыдущее название NeXT) аппарат, разрабатываемый Японским агентством аэрокосмических исследований (JAXA), шестой космический телескоп агентства. Ожидается, что он будет запущен в 2014 на … Википедия
АЭРОДИНАМИКА — раздел механики сплошных сред, в котором изучаются закономерности движения воздуха и других газов, а также характеристики тел, движущихся в воздухе. К аэродинамическим характеристикам тел относятся подъемная сила и сила сопротивления и их… … Энциклопедия Кольера
ВНЕАТМОСФЕРНАЯ АСТРОНОМИЯ — наблюдения астрономических объектов с помощью приборов, поднятых за пределы земной атмосферы на борту геофизических ракет или искусственных спутников. Ее основные разделы это астрономия высоких энергий (в рентгеновских и гамма лучах), оптическая… … Энциклопедия Кольера
Корреляция — (Correlation) Корреляция это статистическая взаимосвязь двух или нескольких случайных величин Понятие корреляции, виды корреляции, коэффициент корреляции, корреляционный анализ, корреляция цен, корреляция валютных пар на Форекс Содержание… … Энциклопедия инвестора
РАСПРОСТРАНЕНИЕ РАДИОВОЛН — процесс передачи эл. магн. колебаний радиодиапазона (см. РАДИОВОЛНЫ) в пространстве от одного места к другому, в частности от передатчика к приёмнику. В естеств. условиях Р. р. происходит в разл. средах, напр. в атмосфере, космической плазме, в… … Физическая энциклопедия
СОЛНЦЕ. — СОЛНЦЕ. Содержание: 1. Введение 2. Внутреннее строение 3. Атмосфера 4. Магнитные поля 5. Излучение 1. Введение С. газовый, точнее плазменный, шар. Радиус С. см, т. е. в 109 раз больше экваториального радиуса Земли; масса С. г, т. е. в 333000 раз… … Физическая энциклопедия
Nonfarm Payrolls — (Количество новых рабочих мест вне сельского хозяйства) Nonfarm Payrolls это макроэкономический показатель занятости населения США вне сферы сельского хозяйства Макроэкономический показатель занятости Nonfarm Payrolls, количество рабочих мест вне … Энциклопедия инвестора
 18+© Академик, 2000-2024
18+© Академик, 2000-2024- Обратная связь: Техподдержка, Реклама на сайте
Экспорт словарей на сайты, сделанные на PHP, Joomla, Drupal, WordPress, MODx.
Перевод: со всех языков на все языки
со всех языков на все языки- Со всех языков на:
- Все языки
- Со всех языков на:
- Все языки
- Английский
- Немецкий
- Русский
- Французский