-
21 process conditions
1) Техника: режим обработки, режимы процесса, технологический режим, условия обработки, технологические параметры2) Железнодорожный термин: режим технологического процесса3) Нефть: режим процесса4) Макаров: условия процесса -
22 undercut
- продороживать (коллектор)
- подтравливание печатного проводника
- подрезать
- подрез зоны сплавления
- подрез
- подпил дерева
- подпил
- ослабленный (сварной шов)
- внутренняя выточка
внутренняя выточка
заточка
зарубка
подрез
—
[ http://slovarionline.ru/anglo_russkiy_slovar_neftegazovoy_promyishlennosti/]Тематики
Синонимы
EN
ослабленный (сварной шов)
—
[ http://slovarionline.ru/anglo_russkiy_slovar_neftegazovoy_promyishlennosti/]Тематики
EN
подпил
Клиновидный рез, видимый на нижнем торце комлевых бревен, сделанный для валки ствола в заданном направлении.
[ http://www.wood.ru/ru/slterm.html]Тематики
EN
подпил дерева
Начальная операция валки дерева, способствующая падению спиленного дерева в заданном направлении, осуществляемая посредством выполнения одного или двух резов у основания ствола со стороны направления падения дерева.
[ ГОСТ 17461-84]Тематики
Обобщающие термины
EN
DE
подрез зоны сплавления
подрез
Дефект в виде углубления по линии сплавления сварного шва с основным металлом.
[ ГОСТ 2601-84]Тематики
- сварка, резка, пайка
Синонимы
EN
DE
FR
подрезать
образовывать подрезы
подрезанный
подсеченный
—
[ http://slovarionline.ru/anglo_russkiy_slovar_neftegazovoy_promyishlennosti/]Тематики
Синонимы
EN
подтравливание печатного проводника
Канавка или выемка у одного края проводника, вызванная процессом травления.
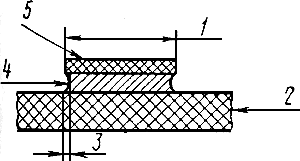
1 - ширина проводника по рабочему фотошаблону; 2 - материал основания; 3 - подтравливание; 4 - проводник; 5 - органическое резистивное покрытие
[ ГОСТ 20406-75]
подтравливание печатного проводника
Уменьшение ширины печатного проводника печатной платы вследствие бокового растворения при травлении.
[ ГОСТ Р 53386-2009]Тематики
EN
FR
продороживать (коллектор)
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
38. Подпил дерева
D. Fallkerb
E. Undercut
Начальная операция валки дерева, способствующая падению спиленного дерева в заданном направлении, осуществляемая посредством выполнения одного или двух резов у основания ствола со стороны направления падения дерева
Источник: ГОСТ 17461-84: Технология лесозаготовительной промышленности. Термины и определения оригинал документа
4.21 подрез (undercut): Канавка, проплавленная в основном металле у кромки лицевой поверхности сварного шва и не заполненная наплавленным металлом.
Источник: ГОСТ Р ИСО 3183-2009: Трубы стальные для трубопроводов нефтяной и газовой промышленности. Общие технические условия оригинал документа
26. Подтравливание печатного проводника
E. Undercut
F. Gravure sous-jacente
Канавка или выемка у одного края проводника, вызванная процессом травления (см. справочное приложение 2, черт. 1)
Источник: ГОСТ 20406-75: Платы печатные. Термины и определения оригинал документа
Англо-русский словарь нормативно-технической терминологии > undercut
-
23 plc
- связь по ЛЭП
- программируемый логический контроллер
- несущая в канале ВЧ-связи по ЛЭП
- маскирование потери пакета
- контроллер с программируемой логикой
- акционерная компания с ограниченной ответственностью
акционерная компания с ограниченной ответственностью
AG - аббревиатура для обозначения AKTIENGESELLSCHAFT (акционерное общество). Оно пишется после названия немецких, австрийских или швейцарских компаний и является эквивалентом английской аббревиатуры plc (public limited company-акционерная компания с ограниченной ответственностью). Сравни: GmbH.
[ http://www.vocable.ru/dictionary/533/symbol/97]Тематики
EN
DE
- AG
контроллер с программируемой логикой
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
маскирование потери пакета
Метод сокрытия факта потери медиапакетов путем генерирования синтезируемых пакетов (МСЭ-T G.1050).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
несущая в канале ВЧ-связи по ЛЭП
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999]Тематики
- электротехника, основные понятия
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего. Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы. Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7. Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series. Рис. 4. Резервированный контроллер FCP270.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA). Рис. 5. Контроллер AC800M.
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
связь по ЛЭП
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
Англо-русский словарь нормативно-технической терминологии > plc
24 quotation
оферта
Предложение заключить контракт в отношении конкретного предмета торгов на условиях, определяемых в тендерной документации.
[РД 01.120.00-КТН-228-06]
оферта
предложение
-
[Упрощение процедур торговли: англо-русский глоссарий терминов (пересмотренное второе издание) НЬЮ-ЙОРК, ЖЕНЕВА, МОСКВА 2011 год]
оферта
Адресованное одному или нескольким конкретным лицам предложение, которое достаточно определенно выражает намерение лица,сделавшего предложение, считать себя заключившим договор с адресатом, если им оно будет принято.Оферта должна содержать существенные условия будущего договора.
[ http://slovar-lopatnikov.ru/]EN
offer
quotation
Document which, with a view to concluding a contract, sets out the conditions under which the goods are offered (UN/ECE/FAL)
[Trade Facilitation Terms: An English - Russian Glossary (revised second edition) NEW YORK, GENEVA, MOSCOW 2624]Тематики
Синонимы
EN
расценка
Размер вознаграждения работнику за единицу объема выполняемой работы.
[ГОСТ 3.1109-82]
расценка
Установленная на что-либо цена, ставка оплаты труда за единицу продукции.
[ http://slovar-lopatnikov.ru/]Тематики
EN
цитата
Часть текста, заимствованная из какого-либо произведения без изменений и использованная в другом тексте, чаще всего с указанием на источник, из которого она взята.
[ ГОСТ Р 7.0.3-2006]
цитата
Фрагмент текста, заимствованный из другого издания или источника.
[ http://www.morepc.ru/dict/]Тематики
- издания, основные виды и элементы
Обобщающие термины
EN
DE
FR
Англо-русский словарь нормативно-технической терминологии > quotation
25 raceway
- труба для электропроводки
- система специальных кабельных коробов
- система кабельных коробов
- рабочая поверхность подшипника
- прямая секция кабельного короба
- канал для электропроводки
- кабельный канал
- кабелепровод
- водопроводный канал
кабелепровод
Любой канал, обеспечивающий прокладку кабелей, в том числе, металлические и пластмассовые трубопроводы, рукава, каналы в полах, сотовые фальшполы, сетчатые лотки, желоба и кабель каналы (ISO/IEC 11801).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]
кабелепровод
трасса
кабельный канал
Трасса или структура, предназначенная или используемая для прокладки и монтажа телекоммуникационных кабелей.
[ http://www.lanmaster.ru/SKS/DOKUMENT/568b.htm]Тематики
- СКС (структурированные кабельные системы)
- электропроводка, электромонтаж
EN
кабельный канал
Кабельным каналом называется закрытое и заглубленное (частично или полностью) в грунт, пол, перекрытие и т. п. непроходное сооружение, предназначенное для размещения в нем кабелей, укладку, осмотр и ремонт которых возможно производить лишь при снятом перекрытии.
[ПУЭ. Раздел 2]
кабельный канал
Элемент системы электропроводки, расположенный над землей или полом или в земле или в полу, открытый, вентилируемый или замкнутый, размеры которого не позволяют вход людей, но обеспечивают доступ к трубам и (или) кабелям по всей длине в процессе монтажа и после него.
Примечание - Кабельный канал может составлять или не составлять часть конструкции здания
[ ГОСТ Р МЭК 60050-826-2009]
канал кабельный
Подземный непроходной канал, предназначенный для размещения электрических кабелей
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]EN
cable channel
element of a wiring system above or in the ground or floor, open, ventilated or closed, and having dimensions which do not permit the entry of persons but allow access to the conduits and/or cables throughout their length during and after installation
NOTE – A cable channel may or may not form part of the building construction.
[IEV number 826-15-06]FR
caniveau, m
élément de canalisation situé au-dessus ou dans le sol ou le plancher, ouvert, ventilé ou fermé, ayant des dimensions ne permettant pas aux personnes d'y circuler, mais dans lequel les conduits ou câbles sont accessibles sur toute leur longueur, pendant et après installation
NOTE – Un caniveau peut ou non faire partie de la construction du bâtiment.
[IEV number 826-15-06]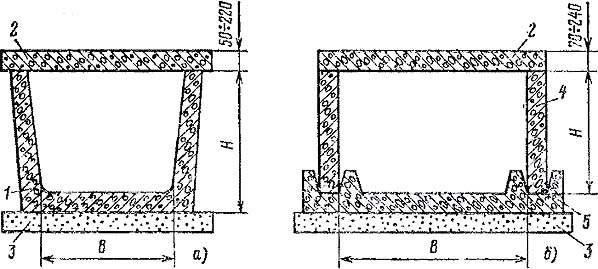
Кабельные каналы:
а — лотковый типа ЛК; б — из сборных плит типа СК:1 — лоток; 2 — плита перекрытия; 3 — подготовка; 4 — плита стеновая; 5 — основание
Высота кабельных каналов в свету не ограничивается, но бывает не более 1200 мм. Ширина каналов определяется в зависимости от размеров применяемых кабельных конструкций из условия сохранения прохода не менее 300 мм при глубине канала до 600 мм, 450 мм — от более 600 до 900 мм, 600 мм при более 900 мм.
Полы в каналах выполняют с уклоном не менее 0,5% в сторону водосборников или ливневой канализации.
Для крепления кабельных конструкций в стенах каналов через каждые 0,8—1 м (по длине) устанавливают закладные детали. При заводском изготовлении стеновых панелей детали устанавливают на предприятии-изготовителе. Закладные детали в каналах глубиной до 600 мм располагают в один ряд, при большей глубине каналов — в два ряда.
В местах поворота и разветвления трассы устраивают уширительные камеры, размеры которых выбирают с учетом допускаемого радиуса изгиба прокладываемого кабеля.
[ http://forca.ru/knigi/oborudovanie/priemka-zdaniy-i-sooruzheniy-pod-montazh-elektrooborudovaniya-11.html]Недопустимые, нерекомендуемые
Примечание(1)- Мнение автора карточкиТематики
- кабели, провода...
- электропроводка, электромонтаж
- электроустановки
Обобщающие термины
EN
- cable channel
- cable duct
- cable trench
- cabling
- conduit
- duct
- electric raceway
- raceway
- trench for cabling
DE
FR
- caniveau du câble
- caniveau, m
- conduite du câble
канал для электропроводки
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
прямая секция кабельного короба
Основной компонент системы кабельных коробов, состоящий из основания (корпуса) со съемной или открывающейся крышкой
[ ГОСТ Р МЭК 61084-1 2007]
прямая секция
Для прямолинейных участков электропроводки без ответвлений и для прямолинейных участков электропроводки с устройствами для ответвлений одиночными кабелями
[ ГОСТ 20803-81]
прямая секция кабельного короба
-
[IEV number 442-02-37]EN
trunking length
the main component of a cable trunking system comprising a base with a removable cover
[IEV number 442-02-37]FR
(longueur de) goulotte
élément principal d'un système de goulottes constitué d'un fond avec un couvercle amovible
[IEV number 442-02-37]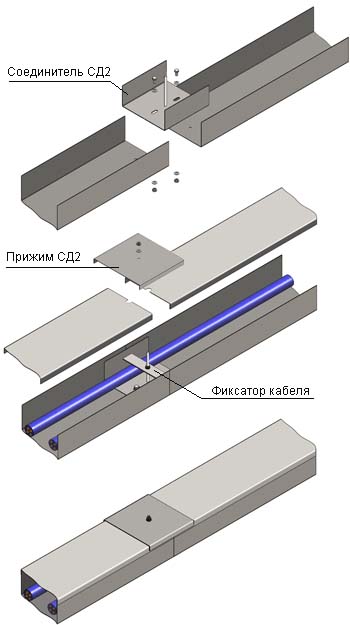
Прямая секция кабельного короба
[ http://mks.montak.ru/catalog/182/232]Тематики
- изделие электромонтажное
- электропроводка, электромонтаж
EN
DE
FR
рабочая поверхность подшипника
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
система кабельных коробов
Система замкнутых оболочек, состоящих из основания (корпуса) и съемной крышки, предназначенная дляполного заключения в себяпрокладки внутри неё изолированных проводов, кабелей, шнуров и (или) для размещения другого электрического оборудования, включая оборудование информационных технологий.
[ ГОСТ Р МЭК 60050-826-2009]
система кабельных коробов
Система замкнутых оболочек, состоящих из корпуса со съемной или открывающейся крышкой, предназначенная для прокладки внутри нее изолированных проводов, кабелей и шнуров и/или для размещения другого электрооборудования.
[ ГОСТ Р МЭК 61084-1 2007]
кабельнесущая система
Система закрытых оболочек, допускающая размещение изолированных проводов на базе подвижных поверхностей и предназначенная для полной защиты изолированных проводов, кабелей, шнуров, а также для размещения другого электрооборудования.
система кабельных коробов
Система закрываемых полых конструкций, состоящая из основания (корпуса) и съемной крышки, предназначенная для прокладки внутри них и защиты от механических повреждений кабелей, шнуров, изолированных проводов и (или) для размещения другого электрического оборудования, включая оборудование информационных технологий.
[ ГОСТ Р МЭК 60204-1-2007]
Примечание. Синим цветом обозначен вариант, предлагаемый автором карточки.EN
cable trunking system
a system of closed enclosures comprising a base with a removable cover, intended for the complete surrounding of insulated conductors, cables, cords and/or for the accommodation of other electrical accessories
Source: 826-06-04 MOD
[IEV number 442-02-34]
cable trunking system
system of closed enclosures comprising a base with a removable cover, intended for the complete surrounding of insulated conductors, cables, cords and/or for the accommodation of other electric equipment including information technology equipment
Source: 442-02-34 MOD
[IEV number 826-15-04]
[IEC 60204-1-2006]FR
système de goulottes
ensemble d'enveloppes fermées munies d'un fond avec un couvercle amovible et destiné à la protection complète de conducteurs isolés et de câbles, ou au logement d'autre petit appareillage électrique
Source: 826-06-04 MOD
[IEV number 442-02-34]
système de goulottes, m
ensemble d'enveloppes fermées, munies d'un fond avec un couvercle amovible et destiné à la protection complète des conducteurs isolés et des câbles et/ou au logement d'autres matériels électriques y compris des matériels de traitement de l'information
Source: 442-02-34 MOD
[IEV number 826-15-04]Обратите внимание!
Различают два вида систем кабельных коробов:
1) (просто) система кабельных коробов (cable trunking system) - система любого сечения, но обязательно с крышкой;
2) система специальных кабельных коробов (cable ducting system) - система некруглого сечения и без крышек.
Примечание. В ПУЭ короб без крышки называется глухой короб (см. кабельный короб)
[Автор карточки]
Параллельные тексты EN-RU
Raceways shall be one- or two-piece design with base and snap-on cover, or three-piece design with base and two snap-on covers which snap side by side on a common base.
[Legrand/Wiremold. SECTION 16130 RACEWAY AND BOXES]В состав поставки входят специальные (глухие) кабельные короба, а также кабельные короба, состоящие из основания и защелкивающейся крышки, или из основания и двух защелкивающихся крышек.
[Перевод Интент]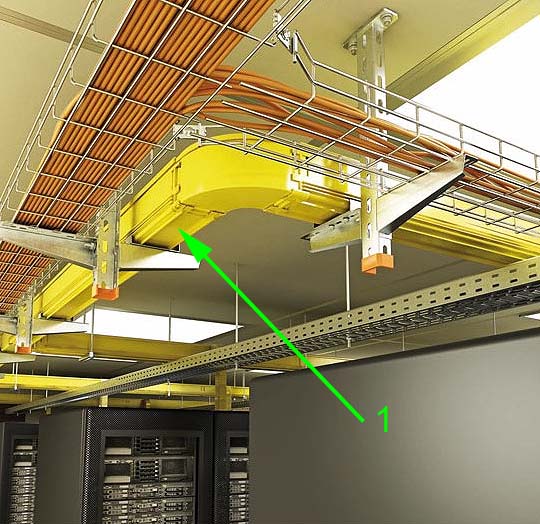
1 - Система кабельных коробов
Система кабельных коробов
Система кабельных коробов
Недопустимые, нерекомендуемые
Примечание(1) - мнение автора карточкиТематики
- изделие электромонтажное
- электропроводка, электромонтаж
EN
DE
FR
система специальных кабельных коробов
Система замкнутых оболочек некруглого сечения, не имеющая съемных или открывающихся крышек, предназначенная для прокладки изолированных проводов, кабелей и шнуров в электрических установках, допускающая их затяжку в нее и их замену
[ ГОСТ Р МЭК 60050-826-2009]
система специальных кабельных коробов
Система коробовпрямоугольногонекруглого сечения, не имеющих съемных или открывающихся крышек, предназначенная для прокладки внутри нее изолированных проводов и кабелей и обеспечивающая возможность затяжки в короба проводов и кабелей и их замены.
[ ГОСТ Р МЭК 61084-1 2007]EN
cable ducting system
a system of closed enclosures of non-circular section, for insulated conductors, cables and cords in electrical installations, allowing them to be drawn in and replaced
[IEV number 442-02-35]FR
système de conduits profilés
ensemble d'enveloppes fermées, de section non circulaire, destiné à la mise en place ou au remplacement de conducteurs isolés ou de câbles, par tirage, dans des installations électriques
[IEV number 442-02-35]Обратите внимание!
Различают два вида систем кабельных коробов:
1) (просто) система кабельных коробов (cable trunking system) - система любого сечения, но обязательно с крышкой;
2) система специальных кабельных коробов (cable ducting system) - система некруглого сечения и без крышек.
[Интент]
Рис. Panduit®
Система специальных кабельных коробов
Рис. Panduit®
Прямая секция системы специальных кабельных коробовТематики
- изделие электромонтажное
- электропроводка, электромонтаж
EN
DE
- geschlossener Elektroinstallationskanal, m
FR
труба
Компонентзащищеннойтрубной электропроводки, имеющий, как правило, круглое поперечное сечение, предназначенный для прокладки изолированных проводов и(или) кабелей в электрических или коммуникационных установках, допускающий их затяжку в него и(или) их замену.
ПримечаниеСоединения труб должны быть достаточно плотными, чтобы изолированные провода и (или) кабели могли быть только затянуты, но не введены сбоку в просвет между трубами.
Трубы должны располагаться достаточно близко друг от друга, так чтобы отсутствовала возможность затянуть изолированные провода и (или) кабели в просвет между ними.
[ ГОСТ Р МЭК 60050-826-2009]
трубопроводтруба
Закрытый элемент кабельной конструкцииКомпонент трубной электропроводки круглого или иного сечения для прокладки в электрических установках кабелей и/или изолированных проводови/или кабелей в электрических установках,позволяющий производить ихвыемкузатяжку и/или замену.
Примечание
Трубопроводы должны быть закрыты таким образом, чтобы имелась возможность вставлять в них изолированные провода и/или кабели.
Трубы должны располагаться достаточно близко друг от друга, так чтобы отсутствовала возможность затянуть изолированные провода и (или) кабели в просвет между ними.
[ ГОСТ Р МЭК 60204-1-2007]
Примечание. Синим цветом обозначен вариант, предлагаемый автором карточки.EN
conduit
a part of a closed wiring system of generally circular cross section for insulated conductors and/or cables in electrical or communication installations, allowing them to be drawn in and/or replaced
Source: 826-06-03 MOD
[IEV number 442-02-03]
conduit
part of a closed wiring system of circular or non-circular cross-section for insulated conductors and/or cables in electrical installations, allowing them to be drawn in and/or replaced
NOTE Conduits should be sufficiently close-jointed so that the insulated conductors and/or cables can only be drawn in and not inserted laterally.
[IEV 826-06-03]
[IEC 60204-1-2006]
raceway
A tube that encloses and protects electric wires.
[ http://www.answers.com/topic/raceway]FR
conduit
élément d'un système de canalisation fermé de section droite généralement circulaire, destiné à la mise en place par tirage ou au remplacement des conducteurs ou des câbles isolés dans les installations électriques ou de télécommunication
Source: 826-06-03 MOD
[IEV number 442-02-03]См. также пластмассовые трубы для электропроводок
См. также стальные трубы для электропроводок
4.1. Для прокладки проводов и кабелей необходимо применять специальные трубы для электропроводок: гладкие из непластифицированного ПВХ по ТУ 6-19-215-86, прил. 2; гладкие из вторичного ПЭ по ТУ 63.178-103-85, прил. 3; гладкие из наполненного ПЭ по ТУ 6-19-051-575-85, прил. 4; гофрированные из НПВХ по ТУ 6-19-051-419-84, прил. 5; гофрированные из ПЭ по ТУ 6-19-051-518-87, прил.6; гофрированные из вторичного ПЭ по ТУ 63.178-117-87, прил.7. При отсутствии указанных труб применяют технологические трубы: гладкие напорные из НПВХ по ТУ 6-19-231-87, прил.8; гладкие напорные из ПЭ низкого и высокого давления по ГОСТ 18599-83, прил. 9; гладкие из ПП по ТУ 38-102-100-76, прил. 10; трубы из вторичного ПЭ по ТУ 6-19-133-79, прил. П.
...
4.3. Применяют также трубы стальные электросварные по ГОСТ 10704-76 сортамент, прил. 12, легкие и обыкновенные водогазопроводные по ГОСТ 3262-75*, прил.13.[Министерство архитектуры, строительства и жилищно-коммунального хозяйства. Концерн «ЭЛЕКТРОМОНТАЖ». Инструкция по монтажу электропроводок в трубах]
Недопустимые, нерекомендуемые
Примечание(1)- Мнение автора карточкиТематики
- электропроводка, электромонтаж
Синонимы
EN
DE
FR
Англо-русский словарь нормативно-технической терминологии > raceway
26 harmful substance
вредное вещество
Вещество, которое отрицательно влияет на живые организмы, постройки и (или) на оборудование
[ ГОСТ 22270-76]
вредное вещество
Вещество, которое при контакте с организмом человека в случае нарушения требований безопасности может вызывать производственные травмы, профессиональные заболевания или отклонения в состоянии здоровья, обнаруживаемые современными методами как в процессе работы, так и в отдаленные сроки жизни настоящего и последующих поколений
[ ГОСТ 12.1.007-76]
вредные вещества
Вещества, для которых органами санэпидемнадзора установлена предельно допустимая концентрация (ПДК) вредного вещества.
[СНиП 41-01-2003]1.1. По степени воздействия на организм вредные вещества подразделяются на четыре класса опасности:
1-й - вещества чрезвычайно опасные;
2-й - вещества высокоопасные;
3-й - вещества умеренно опасные;
4-й - вещества малоопасные.
2.1. На предприятиях, производственная деятельность которых связана с вредными веществами, должны быть:
- разработаны нормативно-технические документы по безопасности труда при производстве, применении и хранении вредных веществ;
- выполнены комплексы организационно-технических, санитарно-гигиенических и медико-биологических мероприятий.
2.2. Мероприятия по обеспечению безопасности труда при контакте с вредными веществами должны предусматривать:
- замену вредных веществ в производстве наименее вредными, сухих способов переработки пылящих материалов - мокрыми;
- выпуск конечных продуктов в непылящих формах;
- замену пламенного нагрева электрическим, твердого и жидкого топлива - газообразным;
- ограничение содержания примесей вредных веществ в исходных и конечных продуктах;
- применение прогрессивной технологии производства (замкнутый цикл, автоматизация, комплексная механизация, дистанционное управление, непрерывность процессов производства, автоматический контроль процессов и операций), исключающей контакт человека с вредными веществами;
- выбор соответствующего производственного оборудования и коммуникаций, не допускающих выделения вредных веществ в воздух рабочей зоны в количествах, превышающих предельно допустимые концентрации при нормальном ведении технологического процесса, а также правильную эксплуатацию санитарно-технического оборудования и устройств (отопления, вентиляции, водопровода, канализации);
- рациональную планировку промышленных площадок, зданий и помещений;
- применение специальных систем по улавливанию и утилизации абгазов, рекуперацию вредных веществ и очистку от них технологических выбросов, нейтрализацию отходов производства, промывных и сточных вод;
- применение средств дегазации, активных и пассивных средств взрывозащиты и взрывоподавления;
- контроль за содержанием вредных веществ в воздухе рабочей зоны в соответствии с требованиями п. 4.1;
- включение в стандарты или технические условия на сырье, продукты и материалы токсикологических характеристик вредных веществ;
- включение данных токсикологических характеристик вредных веществ в технологические регламенты;
- применение средств индивидуальной защиты работающих;
- специальную подготовку и инструктаж обслуживающего персонала;
- проведение предварительных и периодических медицинских осмотров лиц, имеющих контакт с вредными веществами;
- разработку медицинских противопоказаний для работы с конкретными вредными веществами, инструкций по оказанию доврачебной и неотложной медицинской помощи пострадавшим при отравлении.3. Требования к с анитарному ограничению содержания вредных веществ в воздухе рабочей зоны
3.1. Предельно допустимые концентрации (ПДК) вредных веществ в воздухе рабочей зоны - обязательные санитарные нормативы для использования при проектировании производственных зданий, технологических процессов, оборудования и вентиляции, а также для предупредительного и текущего санитарного надзора.
3.3. Содержание в организме вредных веществ, поступающих в него различными путями (при вдыхании, через кожу, через рот) не должно превышать биологических предельно допустимых концентраций (ПДК).
3.4. На период, предшествующий проектированию производств, должны временно устанавливаться ориентировочные безопасные уровни воздействия (ОБУВ) путем расчета по физико-химическим свойствам или путем интерполяций и экстраполяций в рядах, близких по строению соединений, или по показателям острой опасности.
В отдельных случаях, по согласованию с органами государственного санитарного надзора, допускается при проектировании производства использование ОБУВ величиной не менее 1 мг/куб.м в воздухе рабочей зоны (умеренно- и малоопасные вещества). В остальных случаях ОБУВ не должны применяться при проектировании производства.
ОБУВ должны пересматриваться через два года после их утверждения или заменяться ПДК с учетом накопленных данных о соотношении здоровья работающих с условиями труда.3.5. В соответствии с устанавливаемыми ПДК или ОБУВ вредных веществ должны разрабатываться методы их контроля в воздухе рабочей зоны.
[ ГОСТ 12.1.007-76]
Недопустимые, нерекомендуемые
Тематики
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > harmful substance
27 hazardous substance
вредное вещество
Вещество, которое отрицательно влияет на живые организмы, постройки и (или) на оборудование
[ ГОСТ 22270-76]
вредное вещество
Вещество, которое при контакте с организмом человека в случае нарушения требований безопасности может вызывать производственные травмы, профессиональные заболевания или отклонения в состоянии здоровья, обнаруживаемые современными методами как в процессе работы, так и в отдаленные сроки жизни настоящего и последующих поколений
[ ГОСТ 12.1.007-76]
вредные вещества
Вещества, для которых органами санэпидемнадзора установлена предельно допустимая концентрация (ПДК) вредного вещества.
[СНиП 41-01-2003]1.1. По степени воздействия на организм вредные вещества подразделяются на четыре класса опасности:
1-й - вещества чрезвычайно опасные;
2-й - вещества высокоопасные;
3-й - вещества умеренно опасные;
4-й - вещества малоопасные.
2.1. На предприятиях, производственная деятельность которых связана с вредными веществами, должны быть:
- разработаны нормативно-технические документы по безопасности труда при производстве, применении и хранении вредных веществ;
- выполнены комплексы организационно-технических, санитарно-гигиенических и медико-биологических мероприятий.
2.2. Мероприятия по обеспечению безопасности труда при контакте с вредными веществами должны предусматривать:
- замену вредных веществ в производстве наименее вредными, сухих способов переработки пылящих материалов - мокрыми;
- выпуск конечных продуктов в непылящих формах;
- замену пламенного нагрева электрическим, твердого и жидкого топлива - газообразным;
- ограничение содержания примесей вредных веществ в исходных и конечных продуктах;
- применение прогрессивной технологии производства (замкнутый цикл, автоматизация, комплексная механизация, дистанционное управление, непрерывность процессов производства, автоматический контроль процессов и операций), исключающей контакт человека с вредными веществами;
- выбор соответствующего производственного оборудования и коммуникаций, не допускающих выделения вредных веществ в воздух рабочей зоны в количествах, превышающих предельно допустимые концентрации при нормальном ведении технологического процесса, а также правильную эксплуатацию санитарно-технического оборудования и устройств (отопления, вентиляции, водопровода, канализации);
- рациональную планировку промышленных площадок, зданий и помещений;
- применение специальных систем по улавливанию и утилизации абгазов, рекуперацию вредных веществ и очистку от них технологических выбросов, нейтрализацию отходов производства, промывных и сточных вод;
- применение средств дегазации, активных и пассивных средств взрывозащиты и взрывоподавления;
- контроль за содержанием вредных веществ в воздухе рабочей зоны в соответствии с требованиями п. 4.1;
- включение в стандарты или технические условия на сырье, продукты и материалы токсикологических характеристик вредных веществ;
- включение данных токсикологических характеристик вредных веществ в технологические регламенты;
- применение средств индивидуальной защиты работающих;
- специальную подготовку и инструктаж обслуживающего персонала;
- проведение предварительных и периодических медицинских осмотров лиц, имеющих контакт с вредными веществами;
- разработку медицинских противопоказаний для работы с конкретными вредными веществами, инструкций по оказанию доврачебной и неотложной медицинской помощи пострадавшим при отравлении.3. Требования к с анитарному ограничению содержания вредных веществ в воздухе рабочей зоны
3.1. Предельно допустимые концентрации (ПДК) вредных веществ в воздухе рабочей зоны - обязательные санитарные нормативы для использования при проектировании производственных зданий, технологических процессов, оборудования и вентиляции, а также для предупредительного и текущего санитарного надзора.
3.3. Содержание в организме вредных веществ, поступающих в него различными путями (при вдыхании, через кожу, через рот) не должно превышать биологических предельно допустимых концентраций (ПДК).
3.4. На период, предшествующий проектированию производств, должны временно устанавливаться ориентировочные безопасные уровни воздействия (ОБУВ) путем расчета по физико-химическим свойствам или путем интерполяций и экстраполяций в рядах, близких по строению соединений, или по показателям острой опасности.
В отдельных случаях, по согласованию с органами государственного санитарного надзора, допускается при проектировании производства использование ОБУВ величиной не менее 1 мг/куб.м в воздухе рабочей зоны (умеренно- и малоопасные вещества). В остальных случаях ОБУВ не должны применяться при проектировании производства.
ОБУВ должны пересматриваться через два года после их утверждения или заменяться ПДК с учетом накопленных данных о соотношении здоровья работающих с условиями труда.3.5. В соответствии с устанавливаемыми ПДК или ОБУВ вредных веществ должны разрабатываться методы их контроля в воздухе рабочей зоны.
[ ГОСТ 12.1.007-76]
Недопустимые, нерекомендуемые
Тематики
Синонимы
EN
опасное вещество
Любой химический или биологический агент, который представляет собой опасность для здоровья человека, например, вещества или составы, классифицированные как:
- очень токсичные;
- токсичные;
- вредные;
- коррозийные;
- раздражающие;
- сенсибилизирующие;
- канцерогенные;
- мутагенные;
- тератогенные;
- патогенные;
- удушающие.
[ГОСТ ЕН 1070-2003]
опасное вещество
Применительно к оценке — любой материал, находящийся внутри, вокруг или поблизости от объекта имущества, который достаточен с точки зрения формы, количества и биологической доступности, чтобы оказать отрицательное воздействие на рыночную стоимость имущества (МСО).
[ http://slovar-lopatnikov.ru/]Тематики
EN
DE
FR
Англо-русский словарь нормативно-технической терминологии > hazardous substance
28 conduit
изоляционная трубка
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
кабелепровод
Любой канал, обеспечивающий прокладку кабелей, в том числе, металлические и пластмассовые трубопроводы, рукава, каналы в полах, сотовые фальшполы, сетчатые лотки, желоба и кабель каналы (ISO/IEC 11801).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]
кабелепровод
трасса
кабельный канал
Трасса или структура, предназначенная или используемая для прокладки и монтажа телекоммуникационных кабелей.
[ http://www.lanmaster.ru/SKS/DOKUMENT/568b.htm]Тематики
- СКС (структурированные кабельные системы)
- электропроводка, электромонтаж
EN
кабельная канализация
—
[Л.Г.Суменко. Англо-русский словарь по информационным технологиям. М.: ГП ЦНИИС, 2003.]Тематики
EN
кабельный канал
Кабельным каналом называется закрытое и заглубленное (частично или полностью) в грунт, пол, перекрытие и т. п. непроходное сооружение, предназначенное для размещения в нем кабелей, укладку, осмотр и ремонт которых возможно производить лишь при снятом перекрытии.
[ПУЭ. Раздел 2]
кабельный канал
Элемент системы электропроводки, расположенный над землей или полом или в земле или в полу, открытый, вентилируемый или замкнутый, размеры которого не позволяют вход людей, но обеспечивают доступ к трубам и (или) кабелям по всей длине в процессе монтажа и после него.
Примечание - Кабельный канал может составлять или не составлять часть конструкции здания
[ ГОСТ Р МЭК 60050-826-2009]
канал кабельный
Подземный непроходной канал, предназначенный для размещения электрических кабелей
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]EN
cable channel
element of a wiring system above or in the ground or floor, open, ventilated or closed, and having dimensions which do not permit the entry of persons but allow access to the conduits and/or cables throughout their length during and after installation
NOTE – A cable channel may or may not form part of the building construction.
[IEV number 826-15-06]FR
caniveau, m
élément de canalisation situé au-dessus ou dans le sol ou le plancher, ouvert, ventilé ou fermé, ayant des dimensions ne permettant pas aux personnes d'y circuler, mais dans lequel les conduits ou câbles sont accessibles sur toute leur longueur, pendant et après installation
NOTE – Un caniveau peut ou non faire partie de la construction du bâtiment.
[IEV number 826-15-06]
Кабельные каналы:
а — лотковый типа ЛК; б — из сборных плит типа СК:1 — лоток; 2 — плита перекрытия; 3 — подготовка; 4 — плита стеновая; 5 — основание
Высота кабельных каналов в свету не ограничивается, но бывает не более 1200 мм. Ширина каналов определяется в зависимости от размеров применяемых кабельных конструкций из условия сохранения прохода не менее 300 мм при глубине канала до 600 мм, 450 мм — от более 600 до 900 мм, 600 мм при более 900 мм.
Полы в каналах выполняют с уклоном не менее 0,5% в сторону водосборников или ливневой канализации.
Для крепления кабельных конструкций в стенах каналов через каждые 0,8—1 м (по длине) устанавливают закладные детали. При заводском изготовлении стеновых панелей детали устанавливают на предприятии-изготовителе. Закладные детали в каналах глубиной до 600 мм располагают в один ряд, при большей глубине каналов — в два ряда.
В местах поворота и разветвления трассы устраивают уширительные камеры, размеры которых выбирают с учетом допускаемого радиуса изгиба прокладываемого кабеля.
[ http://forca.ru/knigi/oborudovanie/priemka-zdaniy-i-sooruzheniy-pod-montazh-elektrooborudovaniya-11.html]Недопустимые, нерекомендуемые
Примечание(1)- Мнение автора карточкиТематики
- кабели, провода...
- электропроводка, электромонтаж
- электроустановки
Обобщающие термины
EN
- cable channel
- cable duct
- cable trench
- cabling
- conduit
- duct
- electric raceway
- raceway
- trench for cabling
DE
FR
- caniveau du câble
- caniveau, m
- conduite du câble
труба
Компонентзащищеннойтрубной электропроводки, имеющий, как правило, круглое поперечное сечение, предназначенный для прокладки изолированных проводов и(или) кабелей в электрических или коммуникационных установках, допускающий их затяжку в него и(или) их замену.
ПримечаниеСоединения труб должны быть достаточно плотными, чтобы изолированные провода и (или) кабели могли быть только затянуты, но не введены сбоку в просвет между трубами.
Трубы должны располагаться достаточно близко друг от друга, так чтобы отсутствовала возможность затянуть изолированные провода и (или) кабели в просвет между ними.
[ ГОСТ Р МЭК 60050-826-2009]
трубопроводтруба
Закрытый элемент кабельной конструкцииКомпонент трубной электропроводки круглого или иного сечения для прокладки в электрических установках кабелей и/или изолированных проводови/или кабелей в электрических установках,позволяющий производить ихвыемкузатяжку и/или замену.
Примечание
Трубопроводы должны быть закрыты таким образом, чтобы имелась возможность вставлять в них изолированные провода и/или кабели.
Трубы должны располагаться достаточно близко друг от друга, так чтобы отсутствовала возможность затянуть изолированные провода и (или) кабели в просвет между ними.
[ ГОСТ Р МЭК 60204-1-2007]
Примечание. Синим цветом обозначен вариант, предлагаемый автором карточки.EN
conduit
a part of a closed wiring system of generally circular cross section for insulated conductors and/or cables in electrical or communication installations, allowing them to be drawn in and/or replaced
Source: 826-06-03 MOD
[IEV number 442-02-03]
conduit
part of a closed wiring system of circular or non-circular cross-section for insulated conductors and/or cables in electrical installations, allowing them to be drawn in and/or replaced
NOTE Conduits should be sufficiently close-jointed so that the insulated conductors and/or cables can only be drawn in and not inserted laterally.
[IEV 826-06-03]
[IEC 60204-1-2006]
raceway
A tube that encloses and protects electric wires.
[ http://www.answers.com/topic/raceway]FR
conduit
élément d'un système de canalisation fermé de section droite généralement circulaire, destiné à la mise en place par tirage ou au remplacement des conducteurs ou des câbles isolés dans les installations électriques ou de télécommunication
Source: 826-06-03 MOD
[IEV number 442-02-03]См. также пластмассовые трубы для электропроводок
См. также стальные трубы для электропроводок
4.1. Для прокладки проводов и кабелей необходимо применять специальные трубы для электропроводок: гладкие из непластифицированного ПВХ по ТУ 6-19-215-86, прил. 2; гладкие из вторичного ПЭ по ТУ 63.178-103-85, прил. 3; гладкие из наполненного ПЭ по ТУ 6-19-051-575-85, прил. 4; гофрированные из НПВХ по ТУ 6-19-051-419-84, прил. 5; гофрированные из ПЭ по ТУ 6-19-051-518-87, прил.6; гофрированные из вторичного ПЭ по ТУ 63.178-117-87, прил.7. При отсутствии указанных труб применяют технологические трубы: гладкие напорные из НПВХ по ТУ 6-19-231-87, прил.8; гладкие напорные из ПЭ низкого и высокого давления по ГОСТ 18599-83, прил. 9; гладкие из ПП по ТУ 38-102-100-76, прил. 10; трубы из вторичного ПЭ по ТУ 6-19-133-79, прил. П.
...
4.3. Применяют также трубы стальные электросварные по ГОСТ 10704-76 сортамент, прил. 12, легкие и обыкновенные водогазопроводные по ГОСТ 3262-75*, прил.13.[Министерство архитектуры, строительства и жилищно-коммунального хозяйства. Концерн «ЭЛЕКТРОМОНТАЖ». Инструкция по монтажу электропроводок в трубах]
Недопустимые, нерекомендуемые
Примечание(1)- Мнение автора карточкиТематики
- электропроводка, электромонтаж
Синонимы
EN
DE
FR
Англо-русский словарь нормативно-технической терминологии > conduit
29 SFC
- язык SFC
- характеристика чувствительность-частота
- работоспособность в полном объёме
- испытание на усталостное растрескивание под напряжением
испытание на усталостное растрескивание под напряжением
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
работоспособность в полном объёме
полностью работоспособное состояние
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
Синонимы
EN
характеристика чувствительность-частота
—
[Л.Г.Суменко. Англо-русский словарь по информационным технологиям. М.: ГП ЦНИИС, 2003.]Тематики
EN
- sensitivity/frequency characteristic
- SFC
язык SFC
Язык последовательных функциональных схем. Один из пяти стандартизированных языков программирования ПЛК.
[ http://kazanets.narod.ru/PLC_PART2.htm]Язык последовательных функциональных схем SFC (Sequential Function Chart), использующийся совместно с другими языками (обычно с ST и IL), является графическим языком, в котором программа описывается в виде схематической последовательности шагов, объединенных переходами. Язык SFC построен по принципу, близкому к концепции конечного автомата, что делает его одним из самых мощных языков программирования стандарта IEC 61131-3. Пример программы на языке SFC приведен на рис. 3.
Наиболее простым и естественным образом на языке SFC описываются технологические процессы, состоящие из последовательно выполняемых шагов, с возможностью описания нескольких параллельно выполняющихся процессов, для чего в языке имеются специальные символы разветвления и слияния потоков (дивергенции и конвергенции, в терминах стандарта IEC 61131-3).
Шаги последовательности располагаются вертикально сверху вниз. На каждом шаге выполняется определенный перечень действий (операций). При этом для описания самой операции используются другие языки программирования, такие как IL или ST.
Действия (операции) в шагах имеют специальные классификаторы, определяющие способ их выполнения внутри шага: циклическое выполнение, однократное выполнение, однократное выполнение при входе в шаг и т.д. В сумме таких классификаторов насчитывается девять, причем среди них есть, например, классификаторы так называемых сохраняемых и отложенных действий, заставляющие действие выполняться даже после выхода программы из шага.
После того, как шаг выполнен, управление передается следующему за ним шагу. Переход между шагами может быть условным и безусловным. Условный переход требует выполнение определенного логического условия для передачи управления на следующий шаг; пока это условие не выполнено программа будет оставаться внутри текущего шага, даже если все операции внутри шага уже выполнены. Безусловный переход происходит всегда после полного выполнения всех операций на данном шаге. С помощью переходов можно осуществлять разделение и слияние ветвей последовательности, организовать параллельную обработку нескольких ветвей или заставить одну выполненную ветвь ждать завершения другой.
Как и любому другому языку, SFC свойственны некоторые недостатки. Хотя SFC может быть использован для моделирования конечных автоматов, его программная модель не совсем удобна для этого. Это связано с тем, что текущее состояние программы определяется не переменной состояния, а набором флагов активности каждого шага, в связи с чем при недостаточном контроле со стороны программиста могут оказаться одновременно активными несколько шагов, не находящихся в параллельных потоках.
Еще одно неудобство языка связано с тем, что шаги графически располагаются сверху вниз, и переход, идущий в обратном направлении, изображается в неявной форме, в виде стрелки с номером состояния, в которое осуществляется переход.
Рис. 3. Язык последовательных функциональных схем SFC.[ http://kazanets.narod.ru/PLC_PART2.htm]
Тематики
EN
Англо-русский словарь нормативно-технической терминологии > SFC
30 programmable logic controller
контроллер с программируемой логикой
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > programmable logic controller
31 automatic machine
машина-автомат
автомат
Машина, являющаяся автоматическим техническим устройством.
[ ГОСТ 23004-78]
машина-автомат
Машина, в которой все преобразования энергии, материалов и информации выполняются без непосредственного участия человека.
[Сборник рекомендуемых терминов. Выпуск 99. Теория механизмов и машин. Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]Тематики
- автоматизация, основные понятия
- теория механизмов и машин
Обобщающие термины
EN
FR
3.6 станок-автомат (automatic machine): Станок, в котором все технологические операции, включая загрузку и выгрузку разрезаемого материала и отрезанной заготовки, осуществляются автоматически; первый цикл инициируется оператором в процессе наладки, пока не будут достигнуты все условия, необходимые для автоматической работы станка.
Примечание - Пример типичного цикла работы станка-автомата:
- подача разрезаемого материала автоматически;
- крепление разрезаемого материала автоматически;
- быстрый подвод отрезного инструмента к разрезаемому материалу автоматически;
- автоматический процесс резания;
- останов и автоматический отвод отрезного инструмента в исходное положение;
- выгрузка отрезанной заготовки автоматически;
- повторение цикла до получения сигнала останова.
Англо-русский словарь нормативно-технической терминологии > automatic machine
32 programmable controller
программируемый контроллер
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > programmable controller
33 storage-programmable logic controller
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > storage-programmable logic controller
34 Sequential Function Chart
язык SFC
Язык последовательных функциональных схем. Один из пяти стандартизированных языков программирования ПЛК.
[ http://kazanets.narod.ru/PLC_PART2.htm]Язык последовательных функциональных схем SFC (Sequential Function Chart), использующийся совместно с другими языками (обычно с ST и IL), является графическим языком, в котором программа описывается в виде схематической последовательности шагов, объединенных переходами. Язык SFC построен по принципу, близкому к концепции конечного автомата, что делает его одним из самых мощных языков программирования стандарта IEC 61131-3. Пример программы на языке SFC приведен на рис. 3.
Наиболее простым и естественным образом на языке SFC описываются технологические процессы, состоящие из последовательно выполняемых шагов, с возможностью описания нескольких параллельно выполняющихся процессов, для чего в языке имеются специальные символы разветвления и слияния потоков (дивергенции и конвергенции, в терминах стандарта IEC 61131-3).
Шаги последовательности располагаются вертикально сверху вниз. На каждом шаге выполняется определенный перечень действий (операций). При этом для описания самой операции используются другие языки программирования, такие как IL или ST.
Действия (операции) в шагах имеют специальные классификаторы, определяющие способ их выполнения внутри шага: циклическое выполнение, однократное выполнение, однократное выполнение при входе в шаг и т.д. В сумме таких классификаторов насчитывается девять, причем среди них есть, например, классификаторы так называемых сохраняемых и отложенных действий, заставляющие действие выполняться даже после выхода программы из шага.
После того, как шаг выполнен, управление передается следующему за ним шагу. Переход между шагами может быть условным и безусловным. Условный переход требует выполнение определенного логического условия для передачи управления на следующий шаг; пока это условие не выполнено программа будет оставаться внутри текущего шага, даже если все операции внутри шага уже выполнены. Безусловный переход происходит всегда после полного выполнения всех операций на данном шаге. С помощью переходов можно осуществлять разделение и слияние ветвей последовательности, организовать параллельную обработку нескольких ветвей или заставить одну выполненную ветвь ждать завершения другой.
Как и любому другому языку, SFC свойственны некоторые недостатки. Хотя SFC может быть использован для моделирования конечных автоматов, его программная модель не совсем удобна для этого. Это связано с тем, что текущее состояние программы определяется не переменной состояния, а набором флагов активности каждого шага, в связи с чем при недостаточном контроле со стороны программиста могут оказаться одновременно активными несколько шагов, не находящихся в параллельных потоках.
Еще одно неудобство языка связано с тем, что шаги графически располагаются сверху вниз, и переход, идущий в обратном направлении, изображается в неявной форме, в виде стрелки с номером состояния, в которое осуществляется переход.
Рис. 3. Язык последовательных функциональных схем SFC.[ http://kazanets.narod.ru/PLC_PART2.htm]
Тематики
EN
Англо-русский словарь нормативно-технической терминологии > Sequential Function Chart
Страницы- 1
- 2
См. также в других словарях:
наладка систем вентиляции и кондиционирования воздуха на санитарно-гигиенический эффект и (или) технологические условия воздушной среды — 3.14 наладка систем вентиляции и кондиционирования воздуха на санитарно гигиенический эффект и (или) технологические условия воздушной среды: Испытание и регулировка систем вентиляции и кондиционирования воздуха при их одновременной работе в… … Словарь-справочник терминов нормативно-технической документации
Технологические проблемы на ГЭС, которые могут вызвать аварии — Технологическая неисправность – полный или частичный отказ оборудования, может стать причиной серьезной аварии ГЭС. Технологические неисправности, которые могут возникнуть вследствие функциональных отказов оборудования ГЭС: 1. Отставание… … Энциклопедия ньюсмейкеров
технические условия — 37 технические условия: Документ, устанавливающий технические требования, которым должна удовлетворять продукция, процесс или услуга especificacion tecnica Источник … Словарь-справочник терминов нормативно-технической документации
технические условия (ТУ) — 3.5 технические условия (ТУ): Технический документ, в котором изготовитель устанавливает требования к качеству, безопасности и сроку годности конкретной продукции (нескольких конфетных видов продукции), необходимые и достаточные для идентификации … Словарь-справочник терминов нормативно-технической документации
ГОСТ 27.202-83: Надежность в технике. Технологические системы. Методы оценки надежности по параметрам качества изготовляемой продукции — Терминология ГОСТ 27.202 83: Надежность в технике. Технологические системы. Методы оценки надежности по параметрам качества изготовляемой продукции оригинал документа: 1. Метод случайных функций 1.1. Определение показателей точности ТС… … Словарь-справочник терминов нормативно-технической документации
ГОСТ Р 53105-2008: Услуги общественного питания. Технологические документы на продукцию общественного питания. Общие требования к оформлению, построению и содержанию — Терминология ГОСТ Р 53105 2008: Услуги общественного питания. Технологические документы на продукцию общественного питания. Общие требования к оформлению, построению и содержанию оригинал документа: 3.7 входной контроль: Контроль показателей… … Словарь-справочник терминов нормативно-технической документации
промышленный регламент, технологические инструкции и инструкции по упаковке (manufacturing formulae, processing and packaging instructions) — 35 промышленный регламент, технологические инструкции и инструкции по упаковке (manufacturing formulae, processing and packaging instructions): Документы, определяющие все используемые исходные материалы и операции по производству и упаковке… … Словарь-справочник терминов нормативно-технической документации
СТП 26.260.483-2004: Порядок разработки и постановки продукции на производство. Аппараты и блоки технологические — Терминология СТП 26.260.483 2004: Порядок разработки и постановки продукции на производство. Аппараты и блоки технологические: 3.5 Агрегат многофункциональный аппарат, состоящий из одного корпуса (сосуда), в котором смонтированы внутренние… … Словарь-справочник терминов нормативно-технической документации
СТО 17330282.27.140.010-2008: Автоматизированные системы управления технологическими процессами ГЭС и ГАЭС. Условия создания. Нормы и требования — Терминология СТО 17330282.27.140.010 2008: Автоматизированные системы управления технологическими процессами ГЭС и ГАЭС. Условия создания. Нормы и требования: 3.1 автоматизированная система управления технологическим процессом: Система, состоящая … Словарь-справочник терминов нормативно-технической документации
Метеорологические условия в помещении — Люди, находящиеся в жилых, в общественных и промышленных зданиях, а также технологические процессы, осуществляемые в промышленных цехах, требуют поддержания в помещениях необходимых метеорологических условий определенного микроклимата.… … Википедия
СТО 17330282.27.140.018-2008: Гидротурбинные установки. Условия поставки. Нормы и требования — Терминология СТО 17330282.27.140.018 2008: Гидротурбинные установки. Условия поставки. Нормы и требования: 3.1 ввод в эксплуатацию: Событие, фиксирующее готовность изделия к использованию по назначению и документально оформленное в установленном… … Словарь-справочник терминов нормативно-технической документации
 18+© Академик, 2000-2024
18+© Академик, 2000-2024- Обратная связь: Техподдержка, Реклама на сайте
Экспорт словарей на сайты, сделанные на PHP, Joomla, Drupal, WordPress, MODx.
Перевод: с английского на русский
с русского на английский- С русского на:
- Английский
- С английского на:
- Русский