-
81 дистанционное техническое обслуживание
дистанционное техническое обслуживание
Техническое обслуживание объекта, проводимое под управлением персонала без его непосредственного присутствия.
[ОСТ 45.152-99 ]Параллельные тексты EN-RU из ABB Review. Перевод компании Интент
Service from afarДистанционный сервисABB’s Remote Service concept is revolutionizing the robotics industryРазработанная АББ концепция дистанционного обслуживания Remote Service революционизирует робототехникуABB robots are found in industrial applications everywhere – lifting, packing, grinding and welding, to name a few. Robust and tireless, they work around the clock and are critical to a company’s productivity. Thus, keeping these robots in top shape is essential – any failure can lead to serious output consequences. But what happens when a robot malfunctions?Роботы АББ используются во всех отраслях промышленности для перемещения грузов, упаковки, шлифовки, сварки – всего и не перечислить. Надежные и неутомимые работники, способные трудиться день и ночь, они представляют большую ценность для владельца. Поэтому очень важно поддерживать их в надлежащей состоянии, ведь любой отказ может иметь серьезные последствия. Но что делать, если робот все-таки сломался?ABB’s new Remote Service concept holds the answer: This approach enables a malfunctioning robot to alarm for help itself. An ABB service engineer then receives whole diagnostic information via wireless technology, analyzes the data on a Web site and responds with support in just minutes. This unique service is paying off for customers and ABB alike, and in the process is revolutionizing service thinking.Ответом на этот вопрос стала новая концепция Remote Service от АББ, согласно которой неисправный робот сам просит о помощи. C помощью беспроводной технологии специалист сервисной службы АББ получает всю необходимую диагностическую информацию, анализирует данные на web-сайте и через считанные минуты выдает рекомендации по устранению отказа. Эта уникальная возможность одинаково ценна как для заказчиков, так и для самой компании АББ. В перспективе она способна в корне изменить весь подход к организации технического обслуживания.Every minute of production downtime can have financially disastrous consequences for a company. Traditional reactive service is no longer sufficient since on-site service engineer visits also demand great amounts of time and money. Thus, companies not only require faster help from the service organization when needed but they also want to avoid disturbances in production.Каждая минута простоя производства может привести к губительным финансовым последствиям. Традиционная организация сервиса, предусматривающая ликвидацию возникающих неисправностей, становится все менее эффективной, поскольку вызов сервисного инженера на место эксплуатации робота сопряжен с большими затратами времени и денег. Предприятия требуют от сервисной организации не только более быстрого оказания помощи, но и предотвращения возможных сбоев производства.In 2006, ABB developed a new approach to better meet customer’s expectations: Using the latest technologies to reach the robots at customer sites around the world, ABB could support them remotely in just minutes, thereby reducing the need for site visits. Thus the new Remote Service concept was quickly brought to fruition and was launched in mid-2007. Statistics show that by using the system the majority of production stoppages can be avoided.В 2006 г. компания АББ разработала новый подход к удовлетворению ожиданий своих заказчиков. Использование современных технологий позволяет специалистам АББ получать информацию от роботов из любой точки мира и в считанные минуты оказывать помощь дистанционно, в результате чего сокращается количество выездов на место установки. Запущенная в середине 2007 г. концепция Remote Service быстро себя оправдала. Статистика показывает, что её применение позволило предотвратить большое число остановок производства.Reactive maintenance The hardware that makes ABB Remote Service possible consists of a communication unit, which has a function similar to that of an airplane’s so-called black box 1. This “service box” is connected to the robot’s control system and can read and transmit diagnostic information. The unit not only reads critical diagnostic information that enables immediate support in the event of a failure, but also makes it possible to monitor and analyze the robot’s condition, thereby proactively detecting the need for maintenance.Устранение возникающих неисправностей Аппаратное устройство, с помощью которого реализуется концепция Remote Service, представляет собой коммуникационный блок, работающий аналогично черному ящику самолета (рис. 1). Этот блок считывает диагностические данные из контроллера робота и передает их по каналу GSM. Считывается не только информация, необходимая для оказания немедленной помощи в случае отказа, но и сведения, позволяющие контролировать и анализировать состояние робота для прогнозирования неисправностей и планирования технического обслуживания.If the robot breaks down, the service box immediately stores the status of the robot, its historical data (as log files), and diagnostic parameters such as temperature and power supply. Equipped with a built-in modem and using the GSM network, the box transmits the data to a central server for analysis and presentation on a dedicated Web site. Alerts are automatically sent to the nearest of ABB’s 1,200 robot service engineers who then accesses the detailed data and error log to analyze the problem.При поломке робота сервисный блок немедленно сохраняет данные о его состоянии, сведения из рабочего журнала, а также значения диагностических параметров (температура и характеристики питания). Эти данные передаются встроенным GSM-модемом на центральный сервер для анализа и представления на соответствующем web-сайте. Аварийные сообщения автоматически пересылаются ближайшему к месту аварии одному из 1200 сервисных инженеров-робототехников АББ, который получает доступ к детальной информации и журналу аварий для анализа возникшей проблемы.A remotely based ABB engineer can then quickly identify the exact fault, offering rapid customer support. For problems that cannot be solved remotely, the service engineer can arrange for quick delivery of spare parts and visit the site to repair the robot. Even if the engineer must make a site visit, service is faster, more efficient and performed to a higher standard than otherwise possible.Специалист АББ может дистанционно идентифицировать отказ и оказать быструю помощь заказчику. Если неисправность не может быть устранена дистанционно, сервисный инженер организовывает доставку запасных частей и выезд ремонтной бригады. Даже если необходимо разрешение проблемы на месте, предшествующая дистанционная диагностика позволяет минимизировать объем работ и сократить время простоя.Remote Service enables engineers to “talk” to robots remotely and to utilize tools that enable smart, fast and automatic analysis. The system is based on a machine-to-machine (M2M) concept, which works automatically, requiring human input only for analysis and personalized customer recommendations. ABB was recognized for this innovative solution at the M2M United Conference in Chicago in 2008 Factbox.Remote Service позволяет инженерам «разговаривать» с роботами на расстоянии и предоставляет в их распоряжение интеллектуальные средства быстрого автоматизированного анализа. Система основана на основе технологии автоматической связи машины с машиной (M2M), где участие человека сводится к анализу данных и выдаче рекомендаций клиенту. В 2008 г. это инновационное решение от АББ получило приз на конференции M2M United Conference в Чикаго (см. вставку).Proactive maintenanceRemote Service also allows ABB engineers to monitor and detect potential problems in the robot system and opens up new possibilities for proactive maintenance.Прогнозирование неисправностейRemote Service позволяет инженерам АББ дистанционно контролировать состояние роботов и прогнозировать возможные неисправности, что открывает новые возможности по организации профилактического обслуживания.The service box regularly takes condition measurements. By monitoring key parameters over time, Remote Service can identify potential failures and when necessary notify both the end customer and the appropriate ABB engineer. The management and storage of full system backups is a very powerful service to help recover from critical situations caused, for example, by operator errors.Сервисный блок регулярно выполняет диагностические измерения. Непрерывно контролируя ключевые параметры, Remote Service может распознать потенциальные опасности и, при необходимости, оповещать владельца оборудования и соответствующего специалиста АББ. Резервирование данных для возможного отката является мощным средством, обеспечивающим восстановление системы в критических ситуациях, например, после ошибки оператора.The first Remote Service installation took place in the automotive industry in the United States and quickly proved its value. The motherboard in a robot cabinet overheated and the rise in temperature triggered an alarm via Remote Service. Because of the alarm, engineers were able to replace a faulty fan, preventing a costly production shutdown.Первая система Remote Service была установлена на автозаводе в США и очень скоро была оценена по достоинству. Она обнаружила перегрев материнской платы в шкафу управления роботом и передала сигнал о превышении допустимой температуры, благодаря чему инженеры смогли заменить неисправный вентилятор и предотвратить дорогостоящую остановку производства.MyRobot: 24-hour remote access
Having regular access to a robot’s condition data is also essential to achieving lean production. At any time, from any location, customers can verify their robots’ status and access maintenance information and performance reports simply by logging in to ABB’s MyRobot Web site. The service enables customers to easily compare performances, identify bottlenecks or developing issues, and initiate the mostСайт MyRobot: круглосуточный дистанционный доступДля того чтобы обеспечить бесперебойное производство, необходимо иметь регулярный доступ к информации о состоянии робота. Зайдя на соответствующую страницу сайта MyRobot компании АББ, заказчики получат все необходимые данные, включая сведения о техническом обслуживании и отчеты о производительности своего робота. Эта услуга позволяет легко сравнивать данные о производительности, обнаруживать возможные проблемы, а также оптимизировать планирование технического обслуживания и модернизации. С помощью MyRobot можно значительно увеличить выпуск продукции и уменьшить количество выбросов.Award-winning solutionIn June 2008, the innovative Remote Service solution won the Gold Value Chain award at the M2M United Conference in Chicago. The value chain award honors successful corporate adopters of M2M (machine–to-machine) technology and highlights the process of combining multiple technologies to deliver high-quality services to customers. ABB won in the categoryof Smart Services.Приз за удачное решениеВ июне 2008 г. инновационное решение Remote Service получило награду Gold Value Chain (Золотая цепь) на конференции M2M United Conference в Чикаго. «Золотая цепь» присуждается за успешное масштабное внедрение технологии M2M (машина – машина), а также за достижения в объединении различных технологий для предоставления высококачественных услуг заказчикам. АББ одержала победу в номинации «Интеллектуальный сервис».Case study: Tetley Tetley GB Ltd is the world’s second-largest manufacturer and distributor of tea. The company’s manufacturing and distribution business is spread across 40 countries and sells over 60 branded tea bags. Tetley’s UK tea production facility in Eaglescliffe, County Durham is the sole producer of Tetley tea bags 2.Пример применения: Tetley Компания TetleyGB Ltd является вторым по величине мировым производителем и поставщиком чая. Производственные и торговые филиалы компании имеются в 40 странах, а продукция распространяется под 60 торговыми марками. Чаеразвесочная фабрика в Иглсклифф, графство Дарем, Великобритания – единственный производитель чая Tetley в пакетиках (рис. 2).ABB offers a flexible choice of service agreements for both new and existing robot installations, which can help extend the mean time between failures, shorten the time to repair and lower the cost of automated production.Предлагаемые АББ контракты на выполнение технического обслуживания как уже имеющихся, так и вновь устанавливаемых роботов, позволяют значительно увеличить среднюю наработку на отказ, сократить время ремонта и общую стоимость автоматизированного производства.Robots in the plant’s production line were tripping alarms and delaying the whole production cycle. The spurious alarms resulted in much unnecessary downtime that was spent resetting the robots in the hope that another breakdown could be avoided. Each time an alarm was tripped, several hours of production time was lost. “It was for this reason that we were keen to try out ABB’s Remote Service agreement,” said Colin Trevor, plant maintenance manager.Установленные в технологической линии роботы выдавали аварийные сигналы, задерживающие выполнение производственного цикла. Ложные срабатывания вынуждали перезапускать роботов в надежде предотвратить возможные отказы, в результате чего после каждого аварийного сигнала производство останавливалось на несколько часов. «Именно поэтому мы решили попробовать заключить с АББ контракт на дистанционное техническое обслуживание», – сказал Колин Тревор, начальник технической службы фабрики.To prevent future disruptions caused by unplanned downtime, Tetley signed an ABB Response Package service agreement, which included installing a service box and system infrastructure into the robot control systems. Using the Remote Service solution, ABB remotely monitors and collects data on the “wear and tear” and productivity of the robotic cells; this data is then shared with the customer and contributes to smooth-running production cycles.Для предотвращения ущерба в результате незапланированных простоев Tetley заключила с АББ контракт на комплексное обслуживание Response Package, согласно которому системы управления роботами были дооборудованы сервисными блоками с необходимой инфраструктурой. С помощью Remote Service компания АББ дистанционно собирает данные о наработке, износе и производительности роботизированных модулей. Эти данные предоставляются заказчику для оптимизации загрузки производственного оборудования.Higher production uptimeSince the implementation of Remote Service, Tetley has enjoyed greatly reduced robot downtime, with no further disruptions caused by unforeseen problems. “The Remote Service package has dramatically changed the plant,” said Trevor. “We no longer have breakdown issues throughout the shift, helping us to achieve much longer periods of robot uptime. As we have learned, world-class manufacturing facilities need world-class support packages. Remote monitoring of our robots helps us to maintain machine uptime, prevent costly downtime and ensures my employees can be put to more valuable use.”Увеличение полезного времениС момента внедрения Remote Service компания Tetley была приятно удивлена резким сокращением простоя роботов и отсутствием незапланированных остановок производства. «Пакет Remote Service резко изменил ситуацию на предприятии», – сказал Тревор. «Мы избавились от простоев роботов и смогли резко увеличить их эксплуатационную готовность. Мы поняли, что для производственного оборудования мирового класса необходим сервисный пакет мирового класса. Дистанционный контроль роботов помогает нам поддерживать их в рабочем состоянии, предотвращать дорогостоящие простои и задействовать наш персонал для выполнения более важных задач».Service accessRemote Service is available worldwide, connecting more than 500 robots. Companies that have up to 30 robots are often good candidates for the Remote Service offering, as they usually have neither the engineers nor the requisite skills to deal with robotics faults themselves. Larger companies are also enthusiastic about Remote Service, as the proactive services will improve the lifetime of their equipment and increase overall production uptime.Доступность сервисаСеть Remote Service охватывает более 700 роботов по всему миру. Потенциальными заказчиками Remote Service являются компании, имеющие до 30 роботов, но не имеющие инженеров и техников, способных самостоятельно устранять их неисправности. Интерес к Remote Service проявляют и более крупные компании, поскольку они заинтересованы в увеличении срока службы и эксплуатационной готовности производственного оборудования.In today’s competitive environment, business profitability often relies on demanding production schedules that do not always leave time for exhaustive or repeated equipment health checks. ABB’s Remote Service agreements are designed to monitor its customers’ robots to identify when problems are likely to occur and ensure that help is dispatched before the problem can escalate. In over 60 percent of ABB’s service calls, its robots can be brought back online remotely, without further intervention.В условиях современной конкуренции окупаемость бизнеса часто зависит от соблюдения жестких графиков производства, не оставляющих времени для полномасштабных или периодических проверок исправности оборудования. Контракт Remote Service предусматривает мониторинг состояния роботов заказчика для прогнозирования возможных неисправностей и принятие мер по их предотвращению. В более чем 60 % случаев для устранения неисправности достаточно дистанционной консультации в сервисной службе АББ, дальнейшего вмешательства не требуется.ABB offers a flexible choice of service agreements for both new and existing robot installations, which helps extend the mean time between failures, shorten the time to repair and lower the total cost of ownership. With four new packages available – Support, Response, Maintenance and Warranty, each backed up by ABB’s Remote Service technology – businesses can minimize the impact of unplanned downtime and achieve improved production-line efficiency.Компания АББ предлагает гибкий выбор контрактов на выполнение технического обслуживания как уже имеющихся, так и вновь устанавливаемых роботов, которые позволяют значительно увеличить среднюю наработку на отказ, сократить время ремонта и эксплуатационные расходы. Четыре новых пакета на основе технологии Remote Service – Support, Response, Maintenance и Warranty – позволяют минимизировать внеплановые простои и значительно повысить эффективность производства.The benefits of Remote Sevice are clear: improved availability, fewer service visits, lower maintenance costs and maximized total cost of ownership. This unique service sets ABB apart from its competitors and is the beginning of a revolution in service thinking. It provides ABB with a great opportunity to improve customer access to its expertise and develop more advanced services worldwide.Преимущества дистанционного технического обслуживания очевидны: повышенная надежность, уменьшение выездов ремонтных бригад, уменьшение затрат на обслуживание и общих эксплуатационных расходов. Эта уникальная услуга дает компании АББ преимущества над конкурентами и демонстрирует революционный подход к организации сервиса. Благодаря ей компания АББ расширяет доступ заказчиков к опыту своих специалистов и получает возможность более эффективного оказания технической помощи по всему миру.Тематики
- тех. обсл. и ремонт средств электросвязи
Обобщающие термины
EN
Русско-английский словарь нормативно-технической терминологии > дистанционное техническое обслуживание
82 ИБП для централизованных систем питания
ИБП для централизованных систем питания
ИБП для централизованного питания нагрузок
-
[Интент]ИБП для централизованных систем питания
А. П. Майоров
Для многих предприятий всесторонняя защита данных имеет жизненно важное значение. Кроме того, есть виды деятельности, в которых прерывания подачи электроэнергии не допускаются даже на доли секунды. Так работают расчетные центры банков, больницы, аэропорты, центры обмена трафиком между различными сетями. В такой же степени критичны к электропитанию телекоммуникационное оборудование, крупные узлы Интернет, число ежедневных обращений к которым исчисляется десятками и сотнями тысяч. Третья часть обзора по ИБП посвящена оборудованию, предназначенному для обеспечения питания особо важных объектов.
Централизованные системы бесперебойного питания применяют в тех случаях, когда прерывание подачи электроэнергии недопустимо для работы большинства единиц оборудования, составляющих одну информационную или технологическую систему. Как правило, проблемы питания рассматривают в рамках единого проекта наряду со многими другими подсистемами здания, поскольку они требуют вложения значительных средств и увязки с силовой электропроводкой, коммутационным электрооборудованием и аппаратурой кондиционирования. Изначально системы бесперебойного питания рассчитаны на долгие годы эксплуатации, их срок службы можно сравнить со сроком службы кабельных подсистем здания и основного компьютерного оборудования. За 15—20 лет функционирования предприятия оснащение его рабочих станций обновляется три-четыре раза, несколько раз изменяется планировка помещений и производится их ремонт, но все эти годы система бесперебойного питания должна работать безотказно. Для ИБП такого класса долговечность превыше всего, поэтому в их технических спецификациях часто приводят значение важнейшего технического показателя надежности — среднего времени наработки на отказ (Mean Time Before Failure — MTBF). Во многих моделях с ИБП оно превышает 100 тыс. ч, в некоторых из них достигает 250 тыс. ч (т. е. 27 лет непрерывной работы). Правда, сравнивая различные системы, нужно учитывать условия, для которых этот показатель задан, и к предоставленным цифрам относиться осторожно, поскольку условия работы оборудования разных производителей неодинаковы.
Батареи аккумуляторов
К сожалению, наиболее дорогостоящий компонент ИБП — батарея аккумуляторов так долго работать не может. Существует несколько градаций качества батарей, которые различаются сроком службы и, естественно, ценой. В соответствии с принятой два года назад конвенцией EUROBAT по среднему сроку службы батареи разделены на четыре группы:
10+ — высоконадежные,
10 — высокоэффективные,
5—8 — общего назначения,
3—5 — стандартные коммерческие.Учитывая исключительно жесткую конкуренцию на рынке ИБП малой мощности, производители стремятся снизить до минимума начальную стоимость своих моделей, поэтому часто комплектуют их самыми простыми батареями. Применительно к этой группе продуктов такой подход оправдан, поскольку упрощенные ИБП изымают из обращения вместе с защищаемыми ими персональными компьютерами. Впервые вступающие на этот рынок производители, пытаясь оттеснить конкурентов, часто используют в своих интересах неосведомленность покупателей о проблеме качества батарей и предлагают им сравнимые по остальным показателям модели за более низкую цену. Имеются случаи, когда партнеры крупной фирмы комплектуют ее проверенные временем и признанные рынком модели ИБП батареями, произведенными в развивающихся странах, где контроль за технологическим процессом ослаблен, а, значит, срок службы батарей меньше по сравнению с "кондиционными" изделиями. Поэтому, подбирая для себя ИБП, обязательно поинтересуйтесь качеством батареи и ее производителем, избегайте продукции неизвестных фирм. Следование этим рекомендациям сэкономит вам значительные средства при эксплуатации ИБП.
Все сказанное еще в большей степени относится к ИБП высокой мощности. Как уже отмечалось, срок службы таких систем исчисляется многими годами. И все же за это время приходится несколько раз заменять батареи. Как это ни покажется странным, но расчеты, основанные на ценовых и качественных параметрах батарей, показывают, что в долгосрочной перспективе наиболее выгодны именно батареи высшего качества, несмотря на их первоначальную стоимость. Поэтому, имея возможность выбора, устанавливайте батареи только "высшей пробы". Гарантированный срок службы таких батарей приближается к 15 годам.
Не менее важный аспект долговечности мощных систем бесперебойного питания — условия эксплуатации аккумуляторных батарей. Чтобы исключить непредсказуемые, а следовательно, часто приводящие к аварии перерывы в подаче электропитания, абсолютно все включенные в приведенную в статье таблицу модели оснащены самыми совершенными схемами контроля за состоянием батарей. Не мешая выполнению основной функции ИБП, схемы мониторинга, как правило, контролируют следующие параметры батареи: зарядный и разрядный токи, возможность избыточного заряда, рабочую температуру, емкость.
Кроме того, с их помощью рассчитываются такие переменные, как реальное время автономной работы, конечное напряжение зарядки в зависимости от реальной температуры внутри батареи и др.
Подзарядка батареи происходит по мере необходимости и в наиболее оптимальном режиме для ее текущего состояния. Когда емкость батареи снижается ниже допустимого предела, система контроля автоматически посылает предупреждающий сигнал о необходимости ее скорой замены.
Топологические изыски
Долгое время специалисты по системам электропитания руководствовались аксиомой, что мощные системы бесперебойного питания должны иметь топологию on-line. Считается, что именно такая топология гарантирует защиту от всех нарушений на линиях силового питания, позволяет фильтровать помехи во всем частотном диапазоне, обеспечивает на выходе чистое синусоидальное напряжение с номинальными параметрами. Однако за качество электропитания приходится платить повышенным выделением тепловой энергии, сложностью электронных схем, а следовательно, потенциальным снижением надежности. Но, несмотря на это, за многолетнюю историю выпуска мощных ИБП были разработаны исключительно надежные аппараты, способные работать в самых невероятных условиях, когда возможен отказ одного или даже нескольких узлов одновременно. Наиболее важным и полезным элементом мощных ИБП является так называемый байпас. Это обходной путь подачи энергии на выход в случае ремонтных и профилактических работ, вызванных отказом некоторых компонентов систем или возникновением перегрузки на выходе. Байпасы бывают ручными и автоматическими. Они формируются несколькими переключателями, поэтому для их активизации требуется некоторое время, которое инженеры постарались снизить до минимума. И раз уж такой переключатель был создан, то почему бы не использовать его для снижения тепловыделения в то время, когда питающая сеть пребывает в нормальном рабочем состоянии. Так появились первые признаки отступления от "истинного" режима on-line.
Новая топология отдаленно напоминает линейно-интерактивную. Устанавливаемый пользователем системы порог срабатывания определяет момент перехода системы в так называемый экономный режим. При этом напряжение из первичной сети поступает на выход системы через байпас, однако электронная схема постоянно следит за состоянием первичной сети и в случае недопустимых отклонений мгновенно переключается на работу в основном режиме on-line.
Подобная схема применена в ИБП серии Synthesis фирмы Chloride (Сети и системы связи, 1996. № 10. С. 131), механизм переключения в этих устройствах назван "интеллектуальным" ключом. Если качество входной линии укладывается в пределы, определяемые самим пользователем системы, аппарат работает в линейно-интерактивном режиме. При достижении одним из контролируемых параметров граничного значения система начинает работать в нормальном режиме on-line. Конечно, в этом режиме система может работать и постоянно.
За время эксплуатации системы отход от исходной аксиомы позволяет экономить весьма значительные средства за счет сокращения тепловыделения. Сумма экономии оказывается сопоставимой со стоимостью оборудования.
Надо отметить, что от своих исходных принципов отошла еще одна фирма, ранее выпускавшая только линейно-интерактивные ИБП и ИБП типа off-line сравнительно небольшой мощности. Теперь она превысила прежний верхний предел мощности своих ИБП (5 кВА) и построила новую систему по топологии on-line. Я имею в виду фирму АРС и ее массив электропитания Simmetra (Сети и системы связи. 1997. № 4. С. 132). Создатели попытались заложить в систему питания те же принципы повышения надежности, которые применяют при построении особо надежной компьютерной техники. В модульную конструкцию введена избыточность по отношению к управляющим модулям и батареям. В любом из трех выпускаемых шасси из отдельных модулей можно сформировать нужную на текущий момент систему и в будущем наращивать ее по мере надобности. Суммарная мощность самого большого шасси достигает 16 кВА. Еще рано сравнивать эту только что появившуюся систему с другими включенными в таблицу. Однако факт появления нового продукта в этом исключительно устоявшемся секторе рынка сам по себе интересен.
Архитектура
Суммарная выходная мощность централизованных систем бесперебойного питания может составлять от 10—20 кВА до 200—300 МВА и более. Соответственно видоизменяется и структура систем. Как правило, она включают в себя несколько источников, соединенных параллельно тем или иным способом. Аппаратные шкафы устанавливают в специально оборудованных помещениях, где уже находятся распределительные шкафы выходного напряжения и куда подводят мощные входные силовые линии электропитания. В аппаратных помещениях поддерживается определенная температура, а за функционированием оборудования наблюдают специалисты.
Многие реализации системы питания для достижения необходимой надежности требуют совместной работы нескольких ИБП. Существует ряд конфигураций, где работают сразу несколько блоков. В одних случаях блоки можно добавлять постепенно, по мере необходимости, а в других — системы приходится комплектовать в самом начале проекта.
Для повышения суммарной выходной мощности используют два варианта объединения систем: распределенный и централизованный. Последний обеспечивает более высокую надежность, но первый более универсален. Блоки серии EDP-90 фирмы Chloride допускают объединение двумя способами: и просто параллельно (распределенный вариант), и с помощью общего распределительного блока (централизованный вариант). При выборе способа объединения отдельных ИБП необходим тщательный анализ структуры нагрузки, и в этом случае лучше всего обратиться за помощью к специалистам.
Применяют параллельное соединение блоков с централизованным байпасом, которое используют для повышения общей надежности или увеличения общей выходной мощности. Число объединяемых блоков не должно превышать шести. Существуют и более сложные схемы с избыточностью. Так, например, чтобы исключить прерывание подачи питания во время профилактических и ремонтных работ, соединяют параллельно несколько блоков с подключенными к отдельному ИБП входными линиями байпасов.
Особо следует отметить сверхмощные ИБП серии 3000 фирмы Exide. Суммарная мощность системы питания, построенная на модульных элементах этой серии, может достигать нескольких миллионов вольт-ампер, что сравнимо с номинальной мощностью генераторов некоторых электростанций. Все компоненты серии 3000 без исключения построены на модульном принципе. На их основе можно создать особо мощные системы питания, в точности соответствующие исходным требованиям. В процессе эксплуатации суммарную мощность систем можно наращивать по мере увеличения нагрузки. Однако следует признать, что систем бесперебойного питания такой мощности в мире не так уж много, их строят по специальным контрактам. Поэтому серия 3000 не включена в общую таблицу. Более подробные данные о ней можно получить на Web-узле фирмы Exide по адресу http://www.exide.com или в ее московском представительстве.
Важнейшие параметры
Для систем с высокой выходной мощностью очень важны показатели, которые для менее мощных систем не имеют первостепенного значения. Это, например, КПД — коэффициент полезного действия (выражается либо действительным числом меньше единицы, либо в процентах), показывающий, какая часть активной входной мощности поступает к нагрузке. Разница значений входной и выходной мощности рассеивается в виде тепла. Чем выше КПД, тем меньше тепловой энергии выделяется в аппаратной комнате и, значит, для поддержания нормальных рабочих условий требуется менее мощная система кондиционирования.
Чтобы представить себе, о каких величинах идет речь, рассчитаем мощность, "распыляемую" ИБП с номинальным значением на выходе 8 МВт и с КПД, равным 95%. Такая система будет потреблять от первичной силовой сети 8,421 МВт — следовательно, превращать в тепло 0,421 МВт или 421 кВт. При повышении КПД до 98% при той же выходной мощности рассеиванию подлежат "всего" 163 кВт. Напомним, что в данном случае нужно оперировать активными мощностями, измеряемыми в ваттах.
Задача поставщиков электроэнергии — подавать требуемую мощность ее потребителям наиболее экономным способом. Как правило, в цепях переменного тока максимальные значения напряжения и силы тока из-за особенностей нагрузки не совпадают. Из-за этого смещения по фазе снижается эффективность доставки электроэнергии, поскольку при передаче заданной мощности по линиям электропередач, через трансформаторы и прочие элементы систем протекают токи большей силы, чем в случае отсутствия такого смещения. Это приводит к огромным дополнительным потерям энергии, возникающим по пути ее следования. Степень сдвига по фазе измеряется не менее важным, чем КПД, параметром систем питания — коэффициентом мощности.
Во многих странах мира существуют нормы на допустимое значение коэффициента мощности систем питания и тарифы за электроэнергию нередко зависят от коэффициента мощности потребителя. Суммы штрафов за нарушение нормы оказываются настольно внушительными, что приходится заботиться о повышении коэффициента мощности. С этой целью в ИБП встраивают схемы, которые компенсируют сдвиг по фазе и приближают значение коэффициента мощности к единице.
На распределительную силовую сеть отрицательно влияют и нелинейные искажения, возникающие на входе блоков ИБП. Почти всегда их подавляют с помощью фильтров. Однако стандартные фильтры, как правило, уменьшают искажения только до уровня 20—30%. Для более значительного подавления искажений на входе систем ставят дополнительные фильтры, которые, помимо снижения величины искажений до нескольких процентов, повышают коэффициент мощности до 0,9—0,95. С 1998 г. встраивание средств компенсации сдвига по фазе во все источники электропитания компьютерной техники в Европе становится обязательным.
Еще один важный параметр мощных систем питания — уровень шума, создаваемый такими компонентами ИБП, как, например, трансформаторы и вентиляторы, поскольку их часто размещают вместе в одном помещении с другим оборудованием — там где работает и персонал.
Чтобы представить себе, о каких значениях интенсивности шума идет речь, приведем для сравнения такие примеры: уровень шума, производимый шелестом листвы и щебетанием птиц, равен 40 дБ, уровень шума на центральной улице большого города может достигать 80 дБ, а взлетающий реактивный самолет создает шум около 100 дБ.
Достижения в электронике
Мощные системы бесперебойного электропитания выпускаются уже более 30 лет. За это время бесполезное тепловыделение, объем и масса их сократились в несколько раз. Во всех подсистемах произошли и значительные технологические изменения. Если раньше в инверторах использовались ртутные выпрямители, а затем кремниевые тиристоры и биполярные транзисторы, то теперь в них применяются высокоскоростные мощные биполярные транзисторы с изолированным затвором (IGBT). В управляющих блоках аналоговые схемы на дискретных компонентах сначала были заменены на цифровые микросхемы малой степени интеграции, затем — микропроцессорами, а теперь в них установлены цифровые сигнальные процессоры (Digital Signal Processor — DSP).
В системах питания 60-х годов для индикации их состояния использовались многочисленные аналоговые измерительные приборы. Позднее их заменили более надежными и информативными цифровыми панелями из светоизлучающих диодов и жидкокристаллических индикаторов. В наше время повсеместно используют программное управление системами питания.
Еще большее сокращение тепловых потерь и общей массы ИБП дает замена массивных трансформаторов, работающих на частоте промышленной сети (50 или 60 Гц), высокочастотными трансформаторами, работающими на ультразвуковых частотах. Между прочим, высокочастотные трансформаторы давно применяются во внутренних источниках питания компьютеров, а вот в ИБП их стали устанавливать сравнительно недавно. Применение IGBT-приборов позволяет строить и бестрансформаторные инверторы, при этом внутреннее построение ИБП существенно меняется. Два последних усовершенствования применены в ИБП серии Synthesis фирмы Chloride, отличающихся уменьшенным объемом и массой.
Поскольку электронная начинка ИБП становится все сложнее, значительную долю их внутреннего объема теперь занимают процессорные платы. Для радикального уменьшения суммарной площади плат и изоляции их от вредных воздействий электромагнитных полей и теплового излучения используют электронные компоненты для так называемой технологии поверхностного монтажа (Surface Mounted Devices — SMD) — той самой, которую давно применяют в производстве компьютеров. Для защиты электронных и электротехнических компонентов имеются специальные внутренние экраны.
***
Со временем серьезный системный подход к проектированию материальной базы предприятия дает значительную экономию не только благодаря увеличению срока службы всех компонентов "интегрированного интеллектуального" здания, но и за счет сокращения расходов на электроэнергию и текущее обслуживание. Использование централизованных систем бесперебойного питания в пересчете на стоимость одного рабочего места дешевле, чем использование маломощных ИБП для рабочих станций и даже ИБП для серверных комнат. Однако, чтобы оценить это, нужно учесть все факторы установки таких систем.
Предположим, что предприятие свое помещение арендует. Тогда нет никакого смысла разворачивать дорогостоящую систему централизованного питания. Если через пять лет руководство предприятия не намерено заниматься тем же, чем занимается сегодня, то даже ИБП для серверных комнат обзаводиться нецелесообразно. Но если оно рассчитывает на то, что производство будет держаться на плаву долгие годы и решило оснастить принадлежащее им здание системой бесперебойного питания, то для выбора такой системы нужно воспользоваться услугами специализированных фирм. Сейчас их немало и в России. От этих же фирм можно получить информацию о так называемых системах гарантированного электропитания, в которые включены дизельные электрогенераторы и прочие, более экзотические источники энергии.
Нам же осталось рассмотреть лишь методы управления ИБП, что мы и сделаем в одном из следующих номеров нашего журнала
[ http://www.ccc.ru/magazine/depot/97_07/read.html?0502.htm]Тематики
Синонимы
EN
Русско-английский словарь нормативно-технической терминологии > ИБП для централизованных систем питания
83 MTBF
mean time between failures — средняя наработка на отказ (фактическое время работы оборудования, делённое на общее количество отказов оборудования в течение этого периода)Mean Time Between Failure — средняя наработка на отказ [СНО]84 широковещательное объектно-ориентированное сообщение о событии на подстанции
GOOSE-сообщение
-
[Интент]
широковещательное объектно-ориентированное сообщение о событии на подстанции
Широковещательный высокоскоростной внеочередной отчет, содержащий статус каждого из входов, устройств пуска, элементов выхода и реле, реальных и виртуальных.
Примечание. Этот отчет выдается многократно последовательно, как правило, сразу после первого отчета с интервалами 2, 4, 8,…, 60000 мс. Значение задержки первого повторения является конфигурируемым. Такой отчет обеспечивает выдачу высокоскоростных сигналов отключения с высокой вероятностью доставки.
[ ГОСТ Р 54325-2011 (IEC/TS 61850-2:2003)]
общие объектно-ориентированные события на подстанции
-
[ ГОСТ Р МЭК 61850-7-2-2009]
GOOSE
Generic Object Oriented Substation Event (стандарт МЭК 61850-8-1)
Протокол передачи данных о событиях на подстанции.
Один из трех протоколов передачи данных, предлагаемых к использованию в МЭК 61850.
Фактически данный протокол служит для замены медных кабельных связей, предназначенных для передачи дискретных сигналов между устройствами.
[ Цифровые подстанции. Проблемы внедрения устройств РЗА]EN
generic object oriented substation event
on the occurrence of any change of state, an IED will multicast a high speed, binary object, Generic Object Oriented Substation Event (GOOSE) report by exception, typically containing the double command state of each of its status inputs, starters, output elements and relays, actual and virtual.
This report is re-issued sequentially, typically after the first report, again at intervals of 2, 4, 8…60000 ms. (The first repetition delay value is an open value it may be either shorter or longer).
A GOOSE report enables high speed trip signals to be issued with a high probability of delivery
[IEC 61850-2, ed. 1.0 (2003-08)]До недавнего времени для передачи дискретных сигналов между терминалами релейной защиты и автоматики (РЗА) использовались дискретные входы и выходные реле. Передача сигнала при этом осуществляется подачей оперативного напряжения посредством замыкания выходного реле одного терминала на дискретный вход другого терминала (далее такой способ передачи будем называть традиционным).
Такой способ передачи информации имеет следующие недостатки:- необходимо большое количество контрольных кабелей, проложенных между шкафами РЗА,
- терминалы РЗА должны иметь большое количество дискретных входов и выходных реле,
- количество передаваемых сигналов ограничивается определенным количеством дискретных входов и выходных реле,
- отсутствие контроля связи между терминалами РЗА,
- возможность ложного срабатывания дискретного входа при замыкании на землю в цепи передачи сигнала.
Информационные технологии уже давно предоставляли возможность для передачи информации между микропроцессорными терминалами по цифровой сети. Разработанный недавно стандарт МЭК 61850 предоставил такую возможность для передачи сигналов между терминалами РЗА.
Стандарт МЭК 61850 использует для передачи данных сеть Ethernet. Внутри стандарта МЭК 61850 предусмотрен такой механизм, как GOOSE-сообщения, которые и используются для передачи сообщений между терминалами РЗА.
Принцип передачи GOOSE-сообщений показан на рис. 1.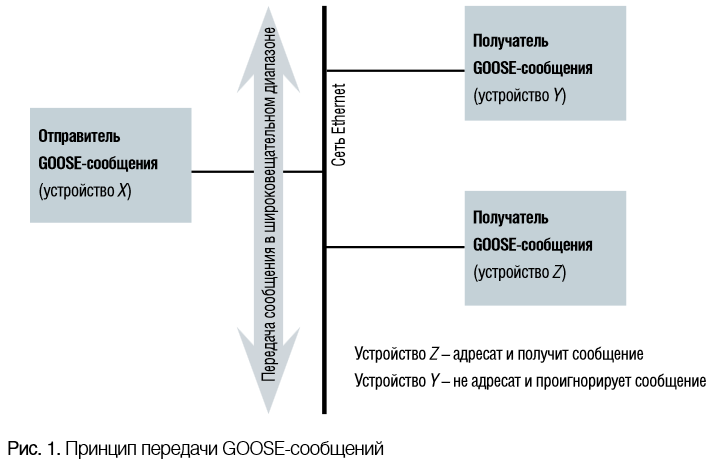
Устройство-отправитель передает по сети Ethernet информацию в широковещательном диапазоне.
В сообщении присутствует адрес отправителя и адреса, по которым осуществляется его передача, а также значение сигнала (например «0» или «1»).
Устройство-получатель получит сообщение, а все остальные устройства его проигнорируют.
Поскольку передача GOOSE-сообщений осуществляется в широковещательном диапазоне, т.е. нескольким адресатам, подтверждение факта получения адресатами сообщения отсутствует. По этой причине передача GOOSE-сообщений в установившемся режиме производится с определенной периодичностью.
При наступлении нового события в системе (например, КЗ и, как следствие, пуска измерительных органов защиты) начинается спонтанная передача сообщения через увеличивающиеся интервалы времени (например, 1 мс, 2 мс, 4 мс и т.д.). Интервалы времени между передаваемыми сообщениями увеличиваются, пока не будет достигнуто предельное значение, определяемое пользователем (например, 50 мс). Далее, до момента наступления нового события в системе, передача будет осуществляется именно с таким периодом. Указанное проиллюстрировано на рис. 2.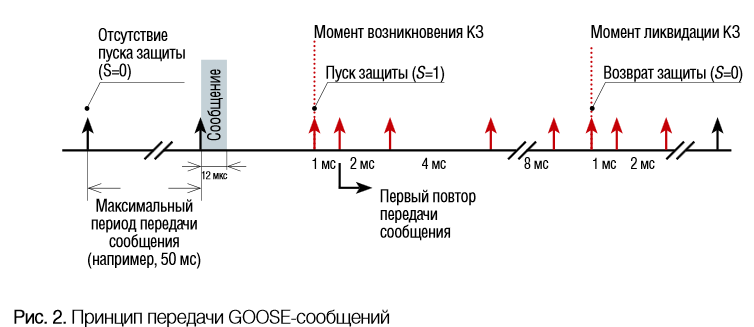
Технология повторной передачи не только гарантирует получение адресатом сообщения, но также обеспечивает контроль исправности линии связи и устройств – любые неисправности будут обнаружены по истечении максимального периода передачи GOOSE-сообщений (с точки зрения эксплуатации практически мгновенно). В случае передачи сигналов традиционным образом неисправность выявляется либо в процессе плановой проверки устройств, либо в случае неправильной работы системы РЗА.
Еще одной особенностью передачи GOOSE-сообщений является использование функций установки приоритетности передачи телеграмм (priority tagging) стандарта Ethernet IEEE 802.3u, которые не используются в других протоколах, в том числе уровня TCP/IP. То есть GOOSE-сообщения идут в обход «нормальных» телеграмм с более высоким приоритетом (см. рис. 3).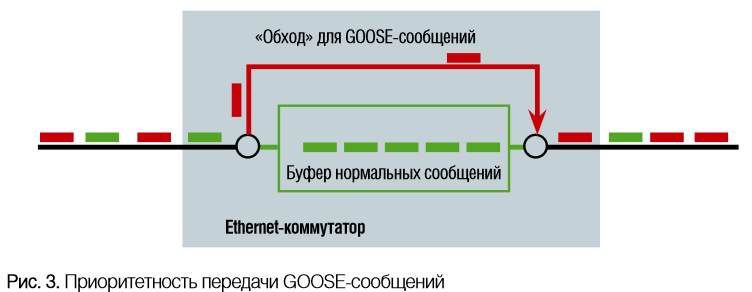
Однако стандарт МЭК 61850 декларирует передачу не только дискретной информации между терминалами РЗА, но и аналоговой. Это означает, что в будущем будет иметься возможность передачи аналоговой информации от ТТ и ТН по цифровым каналам связи. На данный момент готовых решений по передаче аналоговой информации для целей РЗА (в рамках стандарта МЭК 61850) ни один из производителей не предоставляет.
Для того чтобы использовать GOOSE-сообщения для передачи дискретных сигналов между терминалами РЗА необходима достаточная надежность и быстродействие передачи GOOSE-сообщений. Надежность передачи GOOSE-сообщений обеспечивается следующим:- Протокол МЭК 61850 использует Ethernet-сеть, за счет этого выход из строя верхнего уровня АСУ ТП и любого из устройств РЗА не отражается на передаче GOOSE-сообщений оставшихся в работе устройств,
- Терминалы РЗА имеют два независимых Ethernet-порта, при выходе одного из них из строя второй его полностью заменяет,
- Сетевые коммутаторы, к которым подключаются устройства РЗА, соединяются в два независимых «кольца»,
- Разные порты одного терминала РЗА подключаются к разным сетевым коммутаторам, подключенным к разным «кольцам»,
- Каждый сетевой коммутатор имеет дублированное питание от разных источников,
- Во всех устройствах РЗА осуществляется постоянный контроль возможности прохождения каждого сигнала. Это позволяет автоматически определить не только отказы цифровой связи, но и ошибки параметрирования терминалов.
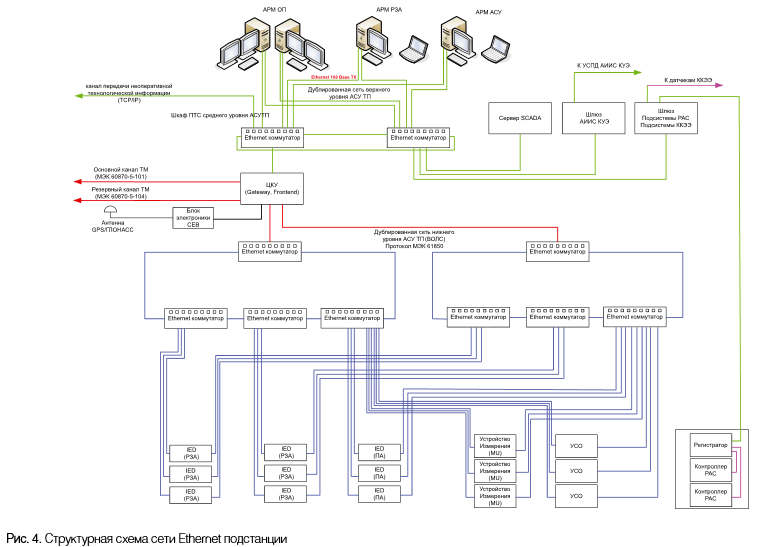
На рис. 4 изображен пример структурной схемы сети Ethernet (100 Мбит/c) подстанции. Отказ в передаче GOOSE-сообщения от одного устройства защиты другому возможен в результате совпадения как минимум двух событий. Например, одновременный отказ двух коммутаторов, к которым подключено одно устройство или одновременный отказ обоих портов одного устройства. Могут быть и более сложные отказы, связанные с одновременным наложением большего количества событий. Таким образом, единичные отказы оборудования не могут привести к отказу передачи GOOSEсообщений. Дополнительно увеличивает надежность то обстоятельство, что даже в случае отказа в передаче GOOSE-сообщения, устройство, принимающее сигнал, выдаст сигнал неисправности, и персонал примет необходимые меры для ее устранения.
Быстродействие.
В соответствии с требованиями стандарта МЭК 61850 передача GOOSE-сообщений должна осуществляться со временем не более 4 мс (для сообщений, требующих быстрой передачи, например, для передачи сигналов срабатывания защит, пусков АПВ и УРОВ и т.п.). Вообще говоря, время передачи зависит от топологии сети, количества устройств в ней, загрузки сети и загрузки вычислительных ресурсов терминалов РЗА, версии операционной системы терминала, коммуникационного модуля, типа центрального процессора терминала, количества коммутаторов и некоторых других аспектов. Поэтому время передачи GOOSE-сообщений должно быть подтверждено опытом эксплуатации.
Используя для передачи дискретных сигналов GOOSE-сообщения необходимо обращать внимание на то обстоятельство, что при использовании аппаратуры некоторых производителей, в случае отказа линии связи, значение передаваемого сигнала может оставаться таким, каким оно было получено в момент приема последнего сообщения.
Однако при отказе связи бывают случаи, когда сигнал должен принимать определенное значение. Например, значение сигнала блокировки МТЗ ввода 6–10 кВ в логике ЛЗШ при отказе связи целесообразно установить в значение «1», чтобы при КЗ на отходящем присоединении не произошло ложного отключения ввода. Так, к примеру, при проектировании терминалов фирмы Siemens изменить значение сигнала при отказе связи возможно с помощью свободно-программируемой CFCлогики (см. рис. 5).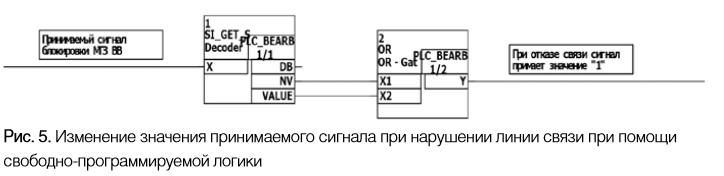
К CFC-блоку SI_GET_STATUS подводится принимаемый сигнал, на выходе блока мы можем получить значение сигнала «Value» и его статус «NV». Если в течение определенного времени не поступит сообщение со значением сигнала, статус сигнала «NV» примет значение «1». Далее статус сигнала и значение сигнала подводятся к элементу «ИЛИ», на выходе которого будет получено значение сигнала при исправности линии связи или «1» при нарушении исправности линии связи. Изменив логику, можно установить значение сигнала равным «0» при обрыве связи.
Использование GOOSE-сообщений предъявляет специальные требования к наладке и эксплуатации устройств РЗА. Во многом процесс наладки становится проще, однако при выводе устройства из работы необходимо следить не только за выводом традиционных цепей, но и не забывать отключать передачу GOOSE-сообщений.
При изменении параметрирования одного устройства РЗА необходимо производить загрузку файла параметров во все устройства, с которыми оно было связано.
В нашей стране имеется опыт внедрения и эксплуатации систем РЗА с передачей дискретных сигналов с использованием GOOSE-сообщений. На первых объектах GOOSE-сообщения использовались ограниченно (ПС 500 кВ «Алюминиевая»).
На ПС 500 кВ «Воронежская» GOOSEсообщения использовались для передачи сигналов пуска УРОВ, пуска АПВ, запрета АПВ, действия УРОВ на отключение смежного элемента, положения коммутационных аппаратов, наличия/отсутствия напряжения, сигналы ЛЗШ, АВР и т.п. Кроме того, на ОРУ 500 кВ и 110 кВ ПС «Воронежская» были установлены полевые терминалы, в которые собиралась информация с коммутационного оборудования и другая дискретная информация с ОРУ (рис. 6). Далее информация с помощью GOOSE-сообщений передавалась в терминалы РЗА, установленные в ОПУ подстанции (рис. 7, 8).
GOOSE-сообщения также были использованы при проектировании уже введенных в эксплуатацию ПС 500 кВ «Бескудниково», ПС 750 кВ «Белый Раст», ПС 330кВ «Княжегубская», ПС 220 кВ «Образцово», ПС 330 кВ «Ржевская». Эта технология применяется и при проектировании строящихся и модернизируемых подстанций ПС 500 кВ «Чагино», ПС 330кВ «Восточная», ПС 330 кВ «Южная», ПС 330 кВ «Центральная», ПС
330 кВ «Завод Ильич» и многих других.
Основные преимущества использования GOOSE-сообщений:- позволяет снизить количество кабелей вторичной коммутации на ПС;
- обеспечивает лучшую помехозащищенность канала связи;
- позволяет снизить время монтажных и пусконаладочных работ;
- исключает проблему излишнего срабатывания дискретных входов терминалов из-за замыканий на землю в цепях оперативного постоянного тока;
- убирает зависимость количества передаваемых сигналов от количества дискретных входов и выходных реле терминалов;
- обеспечивает возможность реконструкции и изменения связей между устройствами РЗА без прокладки дополнительных кабельных связей и повторного монтажа в шкафах;
- позволяет использовать МП терминалы РЗА с меньшим количеством входов и выходов (уменьшение габаритов и стоимости устройства);
- позволяет контролировать возможность прохождения сигнала (увеличивается надежность).
Безусловно, для окончательных выводов должен появиться достаточный опыт эксплуатации. В настоящее время большинство производителей устройств РЗА заявили о возможности использования GOOSEсообщений. Стандарт МЭК 61850 определяет передачу GOOSE-сообщений между терминалами разных производителей. Использование GOOSE-сообщений для передачи дискретных сигналов – это качественный скачок в развитии систем РЗА. С развитием стандарта МЭК 61850, переходом на Ethernet 1 Гбит/сек, с появлением новых цифровых ТТ и ТН, новых выключателей с возможностью подключения их блока управления к шине процесса МЭК 61850, эффективность использования GOOSE-сообщений намного увеличится. Облик будущих подстанций представляется с минимальным количеством контрольных кабелей, с передачей всех сообщений между устройствами РЗА, ТТ, ТН, коммутационными аппаратами через цифровую сеть. Устройства РЗА будут иметь минимальное количество выходных реле и дискретных входов
[ http://romvchvlcomm.pbworks.com/f/goosepaper1.pdf]
В стандарте определены два способа передачи данных напрямую между устройствами: GOOSE и GSSE. Это тоже пример наличия двух способов для реализации одной функции. GOOSE - более новый способ передачи сообщений, разработан специально для МЭК 61850. Способ передачи сообщений GSSE ранее присутствовал в стандарте UCA 2.0, являющимся одним из предшественников МЭК 61850. По сравнению с GSSE, GOOSE имеет более простой формат (Ethernet против стека OSI протоколов) и возможность передачи различных типов данных. Вероятно, способ GSSE включили в МЭК 61850 для того, чтобы производители, имеющие в своих устройствах протокол UCA 2.0, могли сразу декларировать соответствие МЭК 61850. В настоящее время все производители используют только GOOSE для передачи сообщений между устройствами.
Для выбора списка передаваемых данных в GOOSE, как и в отчѐтах, используются наборы данных. Однако тут требования уже другие. Время обработки GOOSE-сообщений должно быть минимальным, поэтому логично передавать наиболее простые типы данных. Обычно передаѐтся само значение сигнала и в некоторых случаях добавляется поле качества. Метка времени обычно включается в набор данных.
...
В устройствах серии БЭ2704 в передаваемых GOOSE-сообщениях содержатся данные типа boolean. Приниматься могут данные типа boolean, dbpos, integer.
Устоявшаяся тенденция существует только для передачи дискретной информации. Аналоговые данные пока передают немногие производители, и поэтому устоявшаяся тенденция в передаче аналоговой информации в данный момент отсутствует.
[ Источник]
Тематики
Синонимы
EN
Русско-английский словарь нормативно-технической терминологии > широковещательное объектно-ориентированное сообщение о событии на подстанции
85 инцидент
инцидент
Отказ или повреждение технических устройств, применяемых на опасном производственном объекте, отклонение от режима технологического процесса, нарушение положений Федеральных законов и иных нормативных правовых актов Российской Федерации, а также нормативных технических документов, устанавливающих правила работ на опасном производственном объекте.
[Федеральный закон от 21. 07.1 997 № 116-ФЗ «О промышленной безопасности опасных производственных объектов»]
[СТО Газпром РД 2.5-141-2005]
инцидент
Отказ машины и (или) оборудования, отклонение от режима технологического процесса, нарушение правил эксплуатации.
инцидент
Событие, вызванное человеческим или естественным фактором, которое требует деятельности аварийного персонала для прекращения или минимизации потерь, сохранения жизни, предотвращения повреждений собственности или сохранения естественных ресурсов.
[ ГОСТ Р 53389-2009]
инцидент
Происшествие, которое может оказать умеренное воздействие на проведение Игр и потенциально привести к кризисной ситуации.
[Департамент лингвистических услуг Оргкомитета «Сочи 2014». Глоссарий терминов]
инцидент
Ситуация, которая может произойти и привести к нарушению деятельности организации, разрушениям, потерям, чрезвычайной ситуации или кризису в бизнесе
[ ГОСТ Р 53647.1-2009]
инцидент
(ITIL Service Operation)
Незапланированное прерывание или снижение качества ИТ-услуги. Сбой конфигурационной единицы, который еще не повлиял на услугу, также является инцидентом, как, например, сбой одного диска из массива зеркалирования.
[Словарь терминов ITIL версия 1.0, 29 июля 2011 г.]EN
incident
(ITIL Service Operation)
An unplanned interruption to an IT service or reduction in the quality of an IT service. Failure of a configuration item that has not yet affected service is also an incident – for example, failure of one disk from a mirror set.
[Словарь терминов ITIL версия 1.0, 29 июля 2011 г.]
incident
Occurrence that may have a moderate impact on the Games and could potentially lead to a crisis.
[Департамент лингвистических услуг Оргкомитета «Сочи 2014». Глоссарий терминов]Тематики
- безопасность машин и труда в целом
- газораспределение
- защита морской среды
- информационные технологии в целом
- менеджмент в целом
- спорт (управление Играми)
EN
2.7 инцидент (incident): Любое событие, которое не является частью стандартной операции услуги и которое вызывает или может вызвать прерывание или снижение качества предоставления услуги.
Примечание - Это событие может вызывать обращения со следующими вопросами: «Как сделать, чтобы я...?».
Источник: ГОСТ Р ИСО/МЭК 20000-1-2010: Информационная технология. Менеджмент услуг. Часть 1. Спецификация оригинал документа
3.32 инцидент (incident): Любое непредвиденное или нежелательное событие, которое может нарушать деятельность или информационную безопасность [2].
Примечание - К инцидентам информационной безопасности относятся:
- утрата услуг, оборудования или устройств;
- системные сбои или перегрузки;
- ошибки пользователей;
- несоблюдение политик или рекомендаций;
- нарушение физических защитных мер;
- неконтролируемые изменения систем;
- сбои программного обеспечения и отказы технических средств;
- нарушение правил доступа.
Источник: ГОСТ Р ИСО/ТО 13569-2007: Финансовые услуги. Рекомендации по информационной безопасности
3.32 инцидент (incident): Любое непредвиденное или нежелательное событие, которое может нарушать деятельность или информационную безопасность [2].
Примечание - К инцидентам информационной безопасности относятся:
- утрата услуг, оборудования или устройств;
- системные сбои или перегрузки;
- ошибки пользователей;
- несоблюдение политик или рекомендаций;
- нарушение физических защитных мер;
- неконтролируемые изменения систем;
- сбои программного обеспечения и отказы технических средств;
- нарушение правил доступа.
Источник: ГОСТ Р ИСО ТО 13569-2007: Финансовые услуги. Рекомендации по информационной безопасности
2.20 инцидент (incident): Ситуация, которая может произойти и привести к нарушению деятельности организации, разрушениям, потерям, чрезвычайной ситуации или кризису в бизнесе.
Источник: ГОСТ Р 53647.2-2009: Менеджмент непрерывности бизнеса. Часть 2. Требования оригинал документа
2.18 инцидент (incident): Ситуация, которая может произойти и привести к нарушению деятельности организации, разрушениям, потерям, чрезвычайной ситуации или кризису в бизнесе.
Источник: ГОСТ Р 53647.1-2009: Менеджмент непрерывности бизнеса. Часть 1. Практическое руководство оригинал документа
3.12 инцидент (incident): Событие, реализация которого может привести к нарушению/разрушению деятельности организации, потерям, аварии или кризису.
Источник: ГОСТ Р 53647.4-2011: Менеджмент непрерывности бизнеса. Руководящие указания по обеспечению готовности к инцидентам и непрерывности деятельности оригинал документа
3.9 инцидент (incident): Событие(я), связанное(ые) с выполнением работы, в ходе или в результате которого(ых) возникают или могут возникнуть травма и иное ухудшение состояния здоровья (см. 3.8) (независимо от их тяжести) или смерть.
Примечания
1 Несчастный случай - это инцидент, который привел к травме, ухудшению состояния здоровья или смерти.
2 Инцидент, который не привел к возникновению травмы, ухудшению состояния здоровья или смерти, может также называться «почти произошедшим инцидентом», «почти случившимся инцидентом», «предпосылкой к инциденту» или «опасным происшествием».
3 Аварийная ситуация (см. 4.4.7) является частной разновидностью инцидента.
Источник: ГОСТ Р 54934-2012: Системы менеджмента безопасности труда и охраны здоровья. Требования оригинал документа
3.9 инцидент (incident): Событие(я), связанное(ые) с выполнением работы, в результате которого(ых) произошло или может произойти ухудшение состояния здоровья (см. 3.8) или травма (независимо от тяжести) или наступает смерть пострадавшего.
Примечания
1 Несчастный случай - это инцидент, который привел к травмированию, ухудшению здоровья или смерти.
2 Инцидент, при котором не возникает травм, заболеваний или смерти, может также называться «опасное происшествие».
3 Аварийная ситуация (см. 4.4.7) является особым видом инцидента.
Источник: ГОСТ Р 54337-2011: Системы менеджмента охраны труда в организациях, выпускающих нанопродукцию. Требования оригинал документа
Русско-английский словарь нормативно-технической терминологии > инцидент
86 управление электропитанием
управление электропитанием
-
[Интент]
Управление электропитанием ЦОД
Автор: Жилкина Наталья
Опубликовано 23 апреля 2009 года
Источники бесперебойного питания, функционирующие в ЦОД, составляют важный элемент общей системы его энергообеспечения. Вписываясь в контур управления ЦОД, система мониторинга и управления ИБП становится ядром для реализации эксплуатационных функций.
Три задачи
Системы мониторинга, диагностики и управления питанием нагрузки решают три основные задачи: позволяют ИБП выполнять свои функции, оповещать персонал о происходящих с ними событиях и посылать команды для автоматического завершения работы защищаемого устройства.
Мониторинг параметров ИБП предполагает отображение и протоколирование состояния устройства и всех событий, связанных с его изменением. Диагностика реализуется функциями самотестирования системы. Управляющие же функции предполагают активное вмешательство в логику работы устройства.Многие специалисты этого рынка, отмечая важность процедуры мониторинга, считают, что управление должно быть сведено к минимуму. «Функция управления ИБП тоже нужна, но скорее факультативно, — говорит Сергей Ермаков, технический директор компании Inelt и эксперт в области систем Chloride. — Я глубоко убежден, что решения об активном управляющем вмешательстве в работу систем защиты электропитания ответственной нагрузки должен принимать человек, а не автоматизированная система. Завершение работы современных мощных серверов, на которых функционируют ответственные приложения, — это, как правило, весьма длительный процесс. ИБП зачастую не способны обеспечивать необходимое для него время, не говоря уж о времени запуска какого-то сервиса». Функция же мониторинга позволяет предотвратить наступление нежелательного события — либо, если таковое произошло, проанализировать его причины, опираясь не на слова, а на запротоколированные данные, хранящиеся в памяти адаптера или файлах на рабочей станции мониторинга.
Эту точку зрения поддерживает и Алексей Сарыгин, технический директор компании Radius Group: «Дистанционное управление мощных ИБП — это вопрос, к которому надо подходить чрезвычайно аккуратно. Если функции дистанционного мониторинга и диспетчеризации необходимы, то практика предоставления доступа персоналу к функциям дистанционного управления представляется радикально неверной. Доступность модулей управления извне потенциально несет в себе риск нарушения безопасности и категорически снижает надежность системы. Если существует физическая возможность дистанционно воздействовать на ИБП, на его параметры, отключение, снятие нагрузки, закрытие выходных тиристорных ключей или блокирование цепи байпаса, то это чревато потерей питания всего ЦОД».
Практически на всех трехфазных ИБП предусмотрена кнопка E.P.O. (Emergency Power Off), дублер которой может быть выведен на пульт управления диспетчерской. Она обеспечивает аварийное дистанционное отключение блоков ИБП при наступлении аварийных событий. Это, пожалуй, единственная возможность обесточить нагрузку, питаемую от трехфазного аппарата, но реализуется она в исключительных случаях.
Что же касается диагностики электропитания, то, как отмечает Юрий Копылов, технический директор московского офиса корпорации Eaton, в последнее время характерной тенденцией в управляющем программном обеспечении стал отказ от предоставления функций удаленного тестирования батарей даже системному администратору.
— Адекватно сравнивать состояние батарей необходимо под нагрузкой, — говорит он, — сам тест запускать не чаще чем раз в два дня, а разряжать батареи надо при одном и том же токе и уровне нагрузки. К тому же процесс заряда — довольно долгий. Все это не идет батареям на пользу.Средства мониторинга
Производители ИБП предоставляют, как правило, сразу несколько средств мониторинга и в некоторых случаях даже управления ИБП — все они основаны на трех основных методах.
В первом случае устройство подключается напрямую через интерфейс RS-232 (Com-порт) к консоли администратора. Дальность такого подключения не превышает 15 метров, но может быть увеличена с помощью конверторов RS-232/485 и RS-485/232 на концах провода, связывающего ИБП с консолью администратора. Такой способ обеспечивает низкую скорость обмена информацией и пригоден лишь для топологии «точка — точка».
Второй способ предполагает использование SNMP-адаптера — встроенной или внешней интерфейсной карты, позволяющей из любой точки локальной сети получить информацию об основных параметрах ИБП. В принципе, для доступа к ИБП через SNMP достаточно веб-браузера. Однако для большего комфорта производители оснащают свои системы более развитым графическим интерфейсом, обеспечивающим функции мониторинга и корректного завершения работы. На базе SNMP-протокола функционируют все основные системы мониторинга и управления ИБП, поставляемые штатно или опционально вместе с ИБП.
Стандартные SNMP-адаптеры поддерживают подключение нескольких аналоговых или пороговых устройств — датчик температуры, движения, открытия двери и проч. Интеграция таких устройств в общую систему мониторинга крупного объекта (например, дата-центра) позволяет охватить огромное количество точек наблюдения и отразить эту информацию на экране диспетчера.
Большое удобство предоставляет метод эксплуатационного удаленного контроля T.SERVICE, позволяющий отследить работу оборудования посредством телефонной линии (через модем GSM) или через Интернет (с помощью интерфейса Net Vision путем рассылки e-mail на электронный адрес потребителя). T.SERVICE обеспечивает диагностирование оборудования в режиме реального времени в течение 24 часов в сутки 365 дней в году. ИБП автоматически отправляет в центр технического обслуживания регулярные отчеты или отчеты при обнаружении неисправности. В зависимости от контролируемых параметров могут отправляться уведомления о неправильной эксплуатации (с пользователем связывается опытный специалист и рекомендует выполнить простые операции для предотвращения ухудшения рабочих характеристик оборудования) или о наличии отказа (пользователь информируется о состоянии устройства, а на место установки немедленно отправляется технический специалист).Профессиональное мнение
Наталья Маркина, коммерческий директор представительства компании SOCOMEC
Управляющее ПО фирмы SOCOMEC легко интегрируется в общий контур управления инженерной инфраструктурой ЦОД посредством разнообразных интерфейсов передачи данных ИБП. Установленное в аппаратной или ЦОД оборудование SOCOMEC может дистанционно обмениваться информацией о своих рабочих параметрах с системами централизованного управления и компьютерными сетями посредством сухих контактов, последовательных портов RS232, RS422, RS485, а также через интерфейс MODBUS TCP и GSS.
Интерфейс GSS предназначен для коммуникации с генераторными установками и включает в себя 4 входа (внешние контакты) и 1 выход (60 В). Это позволяет программировать особые процедуры управления, Global Supply System, которые обеспечивают полную совместимость ИБП с генераторными установками.
У компании Socomec имеется широкий выбор интерфейсов и коммуникационного программного обеспечения для установки диалога между ИБП и удаленными системами мониторинга промышленного и компьютерного оборудования. Такие опции связи, как панель дистанционного управления, интерфейс ADC (реконфигурируемые сухие контакты), обеспечивающий ввод и вывод данных при помощи сигналов сухих контактов, интерфейсы последовательной передачи данных RS232, RS422, RS485 по протоколам JBUS/MODBUS, PROFIBUS или DEVICENET, MODBUS TCP (JBUS/MODBUS-туннелирование), интерфейс NET VISION для локальной сети Ethernet, программное обеспечение TOP VISION для выполнения мониторинга с помощью рабочей станции Windows XP PRO — все это позволяет контролировать работу ИБП удобным для пользователя способом.
Весь контроль управления ИБП, ДГУ, контроль окружающей среды сводится в единый диспетчерский пункт посредством протоколов JBUS/MODBUS.
Индустриальный подход
Третий метод основан на использовании высокоскоростной индустриальной интерфейсной шины: CANBus, JBus, MODBus, PROFIBus и проч. Некоторые модели ИБП поддерживают разновидность универсального smart-слота для установки как карточек SNMP, так и интерфейсной шины. Система мониторинга на базе индустриальной шины может быть интегрирована в уже существующую промышленную SCADA-систему контроля и получения данных либо создана как заказное решение на базе многофункциональных стандартных контроллеров с выходом на шину. Промышленная шина через шлюзы передает информацию на удаленный диспетчерский пункт или в систему управления зданием (Building Management System, BMS). В эту систему могут быть интегрированы и контроллеры, управляющие ИБП.
Универсальные SCADA-системы поддерживают датчики и контроллеры широкого перечня производителей, но они недешевы и к тому же неудобны для внесения изменений. Но если подобная система уже функционирует на объекте, то интеграция в нее дополнительных ИБП не представляет труда.
Сергей Ермаков, технический директор компании Inelt, считает, что применение универсальных систем управления на базе промышленных контроллеров нецелесообразно, если используется для мониторинга только ИБП и ДГУ. Один из практичных подходов — создание заказной системы, с удобной для заказчика графической оболочкой и необходимым уровнем детализации — от карты местности до поэтажного плана и погружения в мнемосхему компонентов ИБП.
— ИБП может передавать одинаковое количество информации о своем состоянии и по прямому соединению, и по SNMP, и по Bus-шине, — говорит Сергей Ермаков. — Применение того или иного метода зависит от конкретной задачи и бюджета. Создав первоначально систему UPS Look для мониторинга ИБП, мы интегрировали в нее систему мониторинга ДГУ на основе SNMP-протокола, после чего по желанию одного из заказчиков конвертировали эту систему на промышленную шину Jbus. Новое ПО JSLook для мониторинга неограниченного количества ИБП и ДГУ по протоколу JBus является полнофункциональным средством мониторинга всей системы электроснабжения объекта.Профессиональное мение
Денис Андреев, руководитель департамента ИБП компании Landata
Практически все ИБП Eaton позволяют использовать коммуникационную Web-SNMP плату Connect UPS и датчик EMP (Environmental Monitoring Probe). Такой комплект позволяет в числе прочего осуществлять мониторинг температуры, влажности и состояния пары «сухих» контактов, к которым можно подключить внешние датчики.
Решение Eaton Environmental Rack Monitor представляет собой аналог такой связки, но с существенно более широким функционалом. Внешне эта система мониторинга температуры, влажности и состояния «сухих» контактов выполнена в виде компактного устройства, которое занимает минимум места в шкафу или в помещении.
Благодаря наличию у Eaton Environmental Rack Monitor (ERM) двух выходов датчики температуры или влажности можно разместить в разных точках стойки или помещения. Поскольку каждый из двух датчиков имеет еще по два сухих контакта, с них дополнительно можно принимать сигналы от датчиков задымления, утечки и проч. В центре обработки данных такая недорогая система ERM, состоящая из неограниченного количества датчиков, может транслировать информацию по протоколу SNMP в HTML-страницу и позволяет, не приобретая специального ПО, получить сводную таблицу измеряемых величин через веб-браузер.
Проблему дефицита пространства и высокой плотности размещения оборудования в серверных и ЦОД решают системы распределения питания линейки Eaton eDPU, которые можно установить как внутри стойки, так и на группу стоек.
Все модели этой линейки представляют четыре семейства: системы базового исполнения, системы с индикацией потребляемого тока, с мониторингом (локальным и удаленным, по сети) и управляемые, с возможностью мониторинга и управления электропитанием вплоть до каждой розетки. С помощью этих устройств можно компактным способом увеличить количество розеток в одной стойке, обеспечить контроль уровня тока и напряжения критичной нагрузки.
Контроль уровня потребляемой мощности может осуществляться с высокой степенью детализации, вплоть до сервера, подключенного к конкретной розетке. Это позволяет выяснить, какой сервер перегревается, где вышел из строя вентилятор, блок питания и т. д. Программным образом можно запустить сервер, подключенный к розетке ePDU. Интеграция системы контроля ePDU в платформу управления Eaton находится в процессе реализации.Требование объекта
Как поясняет Олег Письменский, в критичных объектах, таких как ЦОД, можно условно выделить две области контроля и управления. Первая, Grey Space, — это собственно здание и соответствующая система его энергообеспечения и энергораспределения. Вторая, White Space, — непосредственно машинный зал с его системами.
Выбор системы управления энергообеспечением ЦОД определяется типом объекта, требуемым функционалом системы управления и отведенным на эти цели бюджетом. В большинстве случаев кратковременная задержка между наступлением события и получением информации о нем системой мониторинга по SNMP-протоколу допустима. Тем не менее в целом ряде случаев, если характеристики объекта подразумевают непрерывность его функционирования, объект является комплексным и содержит большое количество элементов, требующих контроля и управления в реальном времени, ни одна стандартная система SNMP-мониторинга не обеспечит требуемого функционала. Для таких объектов применяют системы управления real-time, построенные на базе программно-аппаратных комплексов сбора данных, в том числе c функциями Softlogic.
Системы диспетчеризации и управления крупными объектами реализуются SCADA-системами, широкий перечень которых сегодня присутствует на рынке; представлены они и в портфеле решений Schneider Electric. Тип SCADA-системы зависит от класса и размера объекта, от количества его элементов, требующих контроля и управления, от уровня надежности. Частный вид реализации SCADA — это BMS-система(Building Management System).
«Дата-центры с объемом потребляемой мощности до 1,5 МВт и уровнем надежности Tier I, II и, с оговорками, даже Tier III, могут обслуживаться без дополнительной SCADA-системы, — говорит Олег Письменский. — На таких объектах целесообразно применять ISX Central — программно-аппаратный комплекс, использующий SNMP. Если же категория и мощность однозначно предполагают непрерывность управления, в таких случаях оправданна комбинация SNMP- и SCADA-системы. Например, для машинного зала (White Space) применяется ISX Central с возможными расширениями как Change & Capacity Manager, в комбинации со SCADA-системой, управляющей непосредственно объектом (Grey Space)».Профессиональное мнение
Олег Письменский, директор департамента консалтинга APC by Schneider Electric в России и СНГ
Подход APC by Schneider Electric к реализации полномасштабного полноуправляемого и надежного ЦОД изначально был основан на базисных принципах управления ИТ-инфраструктурой в рамках концепции ITIL/ITSM. И история развития системы управления инфраструктурой ЦОД ISX Manager, которая затем интегрировалась с программно-аппаратным комплексом NetBotz и трансформировалась в портал диспетчеризации ISX Central, — лучшее тому доказательство.
Первым итогом поэтапного приближения к намеченной цели стало наращивание функций контроля параметров энергообеспечения. Затем в этот контур подключилась система управления кондиционированием, система контроля параметров окружающей среды. Очередным шагом стало измерение скорости воздуха, влажности, пыли, радиации, интеграция сигналов от камер аудио- и видеонаблюдения, системы управления блоками розеток, завершения работы сервера и т. д.
Эта система не может и не должна отвечать абсолютно всем принципам ITSM, потому что не все они касаются существа поставленной задачи. Но как только в отношении политик и некоторых тактик управления емкостью и изменениями в ЦОД потребовался соответствующий инструментарий — это нашло отражение в расширении функционала ISX Central, который в настоящее время реализуют ПО APC by Schneider Electric Capacity Manager и APC by Schneider Electric Change Manager. С появлением этих двух решений, интегрированных в систему управления реальным объектом, АРС предоставляет возможность службе эксплуатации оптимально планировать изменения количественного и качественного состава оборудования машинного зала — как на ежедневном оперативном уровне, так и на уровне стратегических задач массовых будущих изменений.
Решение APC by Schneider Electric Capacity обеспечивает автоматизированную обработку информации о свободных ресурсах инженерной инфраструктуры, реальном потреблении мощности и пространстве в стойках. Обращаясь к серверу ISX Central, системы APC by Schneider Electric Capacity Manager и APC by Schneider Electric Change Manager оценивают степень загрузки ИБП и систем охлаждения InRow, прогнозируют воздействие предполагаемых изменений и предлагают оптимальное место для установки нового или перестановки имеющегося оборудования. Новые решения позволяют, выявив последствия от предполагаемых изменений, правильно спланировать замену оборудования в ЦОД.
Переход от частного к общему может потребовать интеграции ISX Central в такие, например, порталы управления, как Tivoli или Open View. Возможны и другие сценарии, когда ISX Central вписывается и в SCADA–систему. В этом случае ISX Central выполняет роль диспетчерской настройки, функционал которой распространяется на серверную комнату, но не охватывает целиком периметр объекта.Случай из практики
Решение задачи управления энергообеспечением ЦОД иногда вступает в противоречие с правилами устройств электроустановок (ПУЭ). Может оказаться, что в соответствии с ПУЭ в ряде случаев (например, при компоновке щитов ВРУ) необходимо обеспечить механические блокировки. Однако далеко не всегда это удается сделать. Поэтому такая задача часто требует нетривиального решения.
— В одном из проектов, — вспоминает Алексей Сарыгин, — где система управления включала большое количество точек со взаимными пересечениями блокировок, требовалось не допустить снижения общей надежности системы. В этом случае мы пришли к осознанному компромиссу, сделали систему полуавтоматической. Там, где это было возможно, присутствовали механические блокировки, за пультом дежурной смены были оставлены функции мониторинга и анализа, куда сводились все данные о положении всех автоматов. Но исполнительную часть вывели на отдельную панель управления уже внутри ВРУ, где были расположены подробные пользовательские инструкции по оперативному переключению. Таким образом мы избавились от излишней автоматизации, но постарались минимизировать потери в надежности и защититься от ошибок персонала.
[ http://www.computerra.ru/cio/old/products/infrastructure/421312/]Тематики
EN
Русско-английский словарь нормативно-технической терминологии > управление электропитанием
87 критерий единичного отказа
критерий единичного отказа
(характеризует способность системы выполнять предназначенную функцию обеспечения безопасности в случае любого единичного независимого отказа)
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
3.18 критерий единичного отказа (single-failure criterion): Критерий (или требование), применяемый к системе таким образом, чтобы она обязательно сохраняла способность выполнять свою функцию в случае любого единичного отказа.
[Глоссарий МАГАТЭ по безопасности, издание 2.0, 2006]
Примечание - См. также «единичный отказ», «отказ программного обеспечения».
Источник: ГОСТ Р МЭК 62340-2011: Атомные станции. Системы контроля и управления, важные для безопасности. Требования по предотвращению отказов по общей причине оригинал документа
3.56 критерий единичного отказа (single-failure criterion): Комплекс оборудования, отвечающий критерию единичного отказа, когда он способен функционировать в соответствии со своим предназначением, несмотря на допускаемый единичный случайный отказ, происшедший внутри комплекса. Последующие отказы, возникающие в результате допускаемого единичного отказа, рассматриваются как составляющие единичного отказа.
[МАГАТЭ 50-S-D]
Примечание 1 - См. также «единичный отказ», «отказ программного обеспечения».
Примечание 2 - Отказ из-за программного обеспечения является систематическим, а не случайным отказом.
Источник: ГОСТ Р МЭК 61513-2011: Атомные станции. Системы контроля и управления, важные для безопасности. Общие требования оригинал документа
Русско-английский словарь нормативно-технической терминологии > критерий единичного отказа
88 множественные отказы
1. common-cause failureтипичный отказ; отказ общего характера — common-mode failure
множество отказов; множество неудачных исходов — failure set
2. multiple failureРусско-английский большой базовый словарь > множественные отказы
89 интенсивность отказов
1. rate of failureтипичный отказ; отказ общего характера — common-mode failure
множество отказов; множество неудачных исходов — failure set
2. failure rateРусско-английский словарь по информационным технологиям > интенсивность отказов
90 неисправность
неисправность
отказ в работе
Состояние машины, характеризующееся неспособностью выполнять заданную функцию, исключая случаи проведения профилактического технического обслуживания, других запланированных действий или недостаток внешних ресурсов (например, отключение энергоснабжения).
Примечание 1
Неисправность часто является результатом повреждения самой машины, однако она может иметь место и без повреждения.
Примечание 2
На практике термины «неисправность», «отказ» и «повреждение» часто используются как синонимы.
[ ГОСТ Р ИСО 12100-1:2007]
неисправность
Состояние оборудования, характеризуемое его неспособностью выполнять требуемую функцию, исключая профилактическое обслуживание или другие планово-предупредительные действия, а также исключая неспособность выполнять требуемую функцию из-за недостатка внешних ресурсов.
Примечание - Неисправность часто является следствием отказа самого оборудования, но может существовать и без предварительного отказа.
[ГОСТ ЕН 1070-2003]
неисправность
Состояние технического объекта (элемента), характеризуемое его неспособностью выполнять требуемую функцию, исключая периоды профилактического технического обслуживания или другие планово-предупредительные действия, или в результате недостатка внешних ресурсов.
Примечания
1 Неисправность является часто следствием отказа самого технического объекта, но может существовать и без предварительного отказа.
2 Английский термин «fault» и его определение идентичны данному в МЭК 60050-191 (МЭС 191-05-01) [1]. В машиностроении чаще применяют французский термин «defaut» или немецкий термин «Fehler», чем термины «panne» и «Fehlzusstand», которые употребляют с этим определением.
[ ГОСТ Р ИСО 13849-1-2003]Тематики
EN
- abnormality
- abort
- abortion
- breakage
- breakdown
- bug
- defect
- disease
- disrepair
- disturbance
- fail
- failure
- failure occurrence
- fault
- faultiness
- fouling
- health problem
- layup
- malfunction
- problem
- shutdown
- trouble
DE
FR
Русско-немецкий словарь нормативно-технической терминологии > неисправность
91 оборудование станции
оборудование станции
В данном контексте “узел” означает конструкцию, систему или элемент. Вспомогательные средства системы безопасности {safety system support features}. Комплект оборудования, который обеспечивает такие виды обслуживания, как охлаждение, смазка и подача энергии, необходимые для системы защиты (системы управления защитными действиями) и систем обслуживания устройств безопасности (исполнительных систем безопасности). После постулируемого исходного события срабатывание некоторых требующихся вспомогательных средств (устройств) системы безопасности может быть инициировано системой защиты, а срабатывание других средств может инициироваться системами обслуживания устройств безопасности, которые обслуживают их; инициирование срабатывания других требующихся вспомогательных средств системы безопасности может не считаться необходимым, если они находятся в задействованном состоянии во время постулируемого исходного события. Система безопасности {safety system}. Система, важная для безопасности, обеспечивающая безопасный останов реактора или отвод остаточного тепла из активной зоны, либо ограничивающая последствия ожидаемых при эксплуатации событий и проектных аварий. Системы безопасности состоят из системы защиты, систем обслуживания устройств безопасности (исполнительных систем безопасности) и вспомогательных средств системы безопасности. Элементы систем безопасности могут предусматриваться исключительно для выполнения функций безопасности или могут выполнять функции безопасности в некоторых эксплуатационных состояниях установки и не связанных с безопасностью функций в других эксплуатационных состояниях. система защиты (система управления защитными действиями) {protection system}. Система, которая контролирует эксплуатацию реактора и которая при обнаружении ненормального условия (состояния) автоматически включает действия, направленные на предотвращение небезопасного или потенциально небезопасного режима. Здесь термин защита означает защиту станции (см. защита (2)). Система в этом случае охватывает все электрические и механические устройства и схемы от датчиков до входных клемм исполнительного устройства. Система обслуживания устройств безопасности (исполнительная система безопасности) {safety actuation system}. Комплекс оборудования, необходимого для выполнения требуемых действий по обеспечению безопасности, инициируемых системой защиты. Система, связанная с безопасностью {safety related system}. Система, важная для безопасности, которая не является частью системы безопасности. Система связанных с безопасностью контрольно-измерительных приборов и систем управления и защиты, как, например, система контрольно-измерительных приборов и систем управления и защиты, которая является важной для безопасности, но которая не является частью системы безопасности. Узел, важный для безопасности {item important to safety}. Узел, который является частью группы безопасности и/или неисправность или отказ которого может привести к радиационному облучению персонала на площадке или лиц из населения. Узлы, важные для безопасности, включают: — конструкции, системы и элементы, неисправность или отказ которых могут приводить к чрезмерному радиационному облучению персонала на площадке или лиц из населения; — конструкции, системы и элементы, которые препятствуют тому, чтобы ожидаемые при эксплуатации события приводили к аварийным условиям; — средства, которые предусматриваются для смягчения последствий неисправности или отказа конструкций, систем и элементов. Узел, связанный с безопасностью {safety related item}. Узел, важный для безопасности, который не является частью системы безопасности.
[Глоссарий МАГАТЭ по вопросам безопасности]Тематики
EN
Русско-английский словарь нормативно-технической терминологии > оборудование станции
92 промышленная сеть верхнего уровня
промышленная сеть верхнего уровня
коммуникационная сеть верхнего уровня
сеть операторского уровня
Сеть верхнего уровня АСУ ТП.
Сеть передачи данных между операторскими станциями, контроллерами и серверами.
[ http://kazanets.narod.ru/NT_PART2.htm]В данной статье речь пойдет о коммуникационных сетях верхнего уровня, входящих в состав АСУ ТП. Их еще называют сетями операторского уровня, ссылаясь на трехуровневую модель распределенных систем управления.
Сети верхнего уровня служат для передачи данных между контроллерами, серверами и операторскими рабочими станциями. Иногда в состав таких сетей входят дополнительные узлы: центральный сервер архива, сервер промышленных приложений, инженерная станция и т.д. Но это уже опции.
Какие сети используются на верхнем уровне?
В отличие от стандартов полевых шин, здесь особого разнообразия нет. Фактически, большинство сетей верхнего уровня, применяемых в современных АСУ ТП, базируется на стандарте Ethernet (IEEE 802.3) или на его более быстрых вариантах Fast Ethernet и Gigabit Ethernet. При этом, как правило, используется полный стек коммуникационных протоколов TCP/IP. В этом плане сети операторского уровня очень похожи на обычные ЛВС, применяемые в офисных приложениях. Широкое промышленное применение сетей Ethernet обусловлено следующими очевидными моментами:
1. Промышленные сети верхнего уровня объединяют множество операторских станций и серверов, которые в большинстве случаев представляют собой персональные компьютеры. Стандарт Ethernet отлично подходит для организации подобных ЛВС; для этого необходимо снабдить каждый компьютер лишь сетевым адаптером (NIC, network interface card). Коммуникационные модули Ethernet для промышленных контроллеров просты в изготовлении и легки в конфигурировании. Стоит отметить, что многие современные контроллеры уже имеют встроенные интерфейсы для подключения к сетям Ethernet.
2. На рынке существует большой выбор недорого коммуникационного оборудования для сетей Ethernet, в том числе специально адаптированного для промышленного применения.
3. Сети Ethernet обладают большой скоростью передачи данных. Например, стандарт Gigabit Ethernet позволяет передавать данные со скоростью до 1 Gb в секунду при использовании витой пары категории 5. Как будет понятно дальше, большая пропускная способность сети становится чрезвычайно важным моментом для промышленных приложений.
4. Очень частым требованием является возможность состыковки сети АСУ ТП с локальной сетью завода (или предприятия). Как правило, существующая ЛВС завода базируется на стандарте Ethernet. Использование единого сетевого стандарта позволяет упростить интеграцию АСУ ТП в общую сеть предприятия, что становится особенно ощутимым при реализации и развертывании систем верхнего уровня типа MES (Мanufacturing Еxecution System).
Однако у промышленных сетей верхнего уровня есть своя специфика, обусловленная условиями промышленного применения. Типичными требованиями, предъявляемыми к таким сетям, являются:
1. Большая пропускная способность и скорость передачи данных. Объем трафика напрямую зависит от многих факторов: количества архивируемых и визуализируемых технологических параметров, количества серверов и операторских станций, используемых прикладных приложений и т.д.
В отличие от полевых сетей жесткого требования детерминированности здесь нет: строго говоря, неважно, сколько времени займет передача сообщения от одного узла к другому – 100 мс или 700 мс (естественно, это не важно, пока находится в разумных пределах). Главное, чтобы сеть в целом могла справляться с общим объемом трафика за определенное время. Наиболее интенсивный трафик идет по участкам сети, соединяющим серверы и операторские станции (клиенты). Это связано с тем, что на операторской станции технологическая информация обновляется в среднем раз в секунду, причем передаваемых технологических параметров может быть несколько тысяч. Но и тут нет жестких временных ограничений: оператор не заметит, если информация будет обновляться, скажем, каждые полторы секунды вместо положенной одной. В то же время если контроллер (с циклом сканирования в 100 мс) столкнется с 500-милисекундной задержкой поступления новых данных от датчика, это может привести к некорректной отработке алгоритмов управления.
2. Отказоустойчивость. Достигается, как правило, путем резервирования коммуникационного оборудования и линий связи по схеме 2*N так, что в случае выхода из строя коммутатора или обрыва канала, система управления способна в кратчайшие сроки (не более 1-3 с) локализовать место отказа, выполнить автоматическую перестройку топологии и перенаправить трафик на резервные маршруты. Далее мы более подробно остановимся на схемах обеспечения резервирования.
3. Соответствие сетевого оборудования промышленным условиям эксплуатации. Под этим подразумеваются такие немаловажные технические меры, как: защита сетевого оборудования от пыли и влаги; расширенный температурный диапазон эксплуатации; увеличенный цикл жизни; возможность удобного монтажа на DIN-рейку; низковольтное питание с возможностью резервирования; прочные и износостойкие разъемы и коннекторы. По функционалу промышленное сетевое оборудование практически не отличается от офисных аналогов, однако, ввиду специального исполнения, стоит несколько дороже.
Рис. 1. Промышленные коммутаторы SCALANCE X200 производства Siemens (слева) и LM8TX от Phoenix Contact (справа): монтаж на DIN-рейку; питание от 24 VDC (у SCALANCE X200 возможность резервирования питания); поддержка резервированных сетевых топологий.Говоря о промышленных сетях, построенных на базе технологии Ethernet, часто используют термин Industrial Ethernet, намекая тем самым на их промышленное предназначение. Сейчас ведутся обширные дискуссии о выделении Industrial Ethernet в отдельный промышленный стандарт, однако на данный момент Industrial Ethernet – это лишь перечень технических рекомендации по организации сетей в производственных условиях, и является, строго говоря, неформализованным дополнением к спецификации физического уровня стандарта Ethernet.
Есть и другая точка зрения на то, что такое Industrial Ethernet. Дело в том, что в последнее время разработано множество коммуникационных протоколов, базирующихся на стандарте Ethernet и оптимизированных для передачи критичных ко времени данных. Такие протоколы условно называют протоколами реального времени, имея в виду, что с их помощью можно организовать обмен данными между распределенными приложениями, которые критичны ко времени выполнения и требуют четкой временной синхронизации. Конечная цель – добиться относительной детерминированности при передаче данных. В качестве примера Industrial Ethernet можно привести:
1. Profinet;
2. EtherCAT;
3. Ethernet Powerlink;
4. Ether/IP.
Эти протоколы в различной степени модифицируют стандартный стек TCP/IP, добавляя в него новые алгоритмы сетевого обмена, диагностические функции, методы самокорректировки и функции синхронизации, оставляя при этом канальный и физический уровни Ethernet неизменными. Это позволяет использовать новые протоколы передачи данных в существующих сетях Ethernet с использованием стандартного коммуникационного оборудования.
Теперь рассмотрим конкретные конфигурации сетей операторского уровня.
На рисунке 2 показана самая простая – базовая конфигурация. Отказ любого коммутатора или обрыв канала связи ( link) ведет к нарушению целостности всей системы. Единичная точка отказа изображена на рисунке красным крестиком.
Рис. 2. Нерезервированная конфигурация сети верхнего уровняТакая простая конфигурация подходит лишь для систем управления, внедряемых на некритичных участках производства (водоподготовка для каких-нибудь водяных контуров или, например, приемка молока на молочном заводе). Для более ответственных технологических участков такое решение явно неудовлетворительно.
На рисунке 3 показана отказоустойчивая конфигурация с полным резервированием. Каждый канал связи и сетевой компонент резервируется. Обратите внимание, сколько отказов переносит система прежде, чем теряется коммуникация с одной рабочей станцией оператора. Но даже это не выводит систему из строя, так как остается в действии вторая, страхующая рабочая станция.
Рис. 3. Полностью резервированная конфигурация сети верхнего уровняРезервирование неизбежно ведет к возникновению петлевидных участков сети – замкнутых маршрутов. Стандарт Ethernet, строго говоря, не допускает петлевидных топологий, так как это может привести к зацикливанию пакетов особенно при широковещательной рассылке. Но и из этой ситуации есть выход. Современные коммутаторы, как правило, поддерживают дополнительный прокол Spanning Tree Protocol (STP, IEEE 802.1d), который позволяет создавать петлевидные маршруты в сетях Ethernet. Постоянно анализируя конфигурацию сети, STP автоматически выстраивает древовидную топологию, переводя избыточные коммуникационные линии в резерв. В случае нарушения целостности построенной таким образом сети (обрыв связи, например), STP в считанные секунды включает в работу необходимые резервные линии, восстанавливая древовидную структуры сети. Примечательно то, что этот протокол не требует первичной настройки и работает автоматически. Есть и более мощная разновидность данного протокола Rapid Spanning Tree Protocol (RSTP, IEEE 802.1w), позволяющая снизить время перестройки сети вплоть до нескольких миллисекунд. Протоколы STP и RSTP позволяют создавать произвольное количество избыточных линий связи и являются обязательным функционалом для промышленных коммутаторов, применяемых в резервированных сетях.
На рисунке 4 изображена резервированная конфигурация сети верхнего уровня, содержащая оптоволоконное кольцо для организации связи между контроллерами и серверами. Иногда это кольцо дублируется, что придает системе дополнительную отказоустойчивость.
Рис. 4. Резервированная конфигурация сети на основе оптоволоконного кольцаМы рассмотрели наиболее типичные схемы построения сетей, применяемых в промышленности. Вместе с тем следует заметить, что универсальных конфигураций сетей попросту не существует: в каждом конкретном случае проектировщик вырабатывает подходящее техническое решение исходя из поставленной задачи и условий применения.
[ http://kazanets.narod.ru/NT_PART2.htm]Тематики
Синонимы
EN
Русско-английский словарь нормативно-технической терминологии > промышленная сеть верхнего уровня
93 неисправность
неисправность
отказ в работе
Состояние машины, характеризующееся неспособностью выполнять заданную функцию, исключая случаи проведения профилактического технического обслуживания, других запланированных действий или недостаток внешних ресурсов (например, отключение энергоснабжения).
Примечание 1
Неисправность часто является результатом повреждения самой машины, однако она может иметь место и без повреждения.
Примечание 2
На практике термины «неисправность», «отказ» и «повреждение» часто используются как синонимы.
[ ГОСТ Р ИСО 12100-1:2007]
неисправность
Состояние оборудования, характеризуемое его неспособностью выполнять требуемую функцию, исключая профилактическое обслуживание или другие планово-предупредительные действия, а также исключая неспособность выполнять требуемую функцию из-за недостатка внешних ресурсов.
Примечание - Неисправность часто является следствием отказа самого оборудования, но может существовать и без предварительного отказа.
[ГОСТ ЕН 1070-2003]
неисправность
Состояние технического объекта (элемента), характеризуемое его неспособностью выполнять требуемую функцию, исключая периоды профилактического технического обслуживания или другие планово-предупредительные действия, или в результате недостатка внешних ресурсов.
Примечания
1 Неисправность является часто следствием отказа самого технического объекта, но может существовать и без предварительного отказа.
2 Английский термин «fault» и его определение идентичны данному в МЭК 60050-191 (МЭС 191-05-01) [1]. В машиностроении чаще применяют французский термин «defaut» или немецкий термин «Fehler», чем термины «panne» и «Fehlzusstand», которые употребляют с этим определением.
[ ГОСТ Р ИСО 13849-1-2003]Тематики
EN
- abnormality
- abort
- abortion
- breakage
- breakdown
- bug
- defect
- disease
- disrepair
- disturbance
- fail
- failure
- failure occurrence
- fault
- faultiness
- fouling
- health problem
- layup
- malfunction
- problem
- shutdown
- trouble
DE
FR
Русско-французский словарь нормативно-технической терминологии > неисправность
94 отчет по анализу ошибок
Русско-английский большой базовый словарь > отчет по анализу ошибок
95 воздушный
аварийная связь с воздушным судномair distress communicationаварийная ситуация с воздушным судномaircraft emergencyаварийные воздушные перевозкиdistress trafficавиатрасса верхнего воздушного пространстваhigh-level airwayавиатрасса нижнего воздушного пространстваlow-level airwayавиационный двигатель воздушного охлажденияair-cooled engineавтоматическое выравнивание воздушного судна перед посадкойautoflareавторотация воздушного винтаpropeller windmillingавторотирующий воздушный винтwindmilling propellerагентство по отправке грузов воздушным транспортомair freight forwarderадминистративное воздушное судноexecutive aircraftангар для воздушного суднаaircraft shedаренда воздушного суднаaircraft leaseаренда воздушного судна без экипажа1. aircraft dry lease2. aircraft drylease аренда воздушного судна вместе с экипажемaircraft wet leaseарендатор воздушного суднаlessee of an aircraftарендованное воздушное судноleased aircraftарендовать воздушное судноlease an aircraftАссоциация воздушного транспорта СШАair TransportАссоциация воздушных перевозчиковNational Air Carrierаудиовизуальная система имитации воздушного движенияair traffic audio simulation system(для тренажеров) аэродинамически сбалансированное воздушное судноairodynamically balanced aircraftаэродром для реактивных воздушных судовjet aerodromeаэродром местных воздушных линийdomestic aerodromeаэродромный обогреватель воздушного суднаaircraft heaterаэродром совместного базирования гражданского и военных воздушных судовjoint civil and military aerodromeаэронавигационная карта воздушных подходовaeronautical approach chartаэропорт высокой плотности воздушного движенияhigh-density airportбаза ремонта воздушных судовaircraft repair depotбалансировать воздушное судно1. balance the aircraft2. trim the aircraft балансировать воздушный винтbalance the propellerбалансировка воздушного винтаpropeller balanceбалансировка воздушного суднаaircraft trimбезопасное управление воздушным судномsafe handling of an aircraftбезопасность воздушного движенияair safetyбезопасный срок службы воздушного суднаaircraft safe lifeбесшумное воздушное судноquiet aircraftбиение воздушного винтаairscrew knockборт воздушного суднаaircraft sideбортовая кухня воздушного суднаaircraft galleyбортовой регистрационный знак воздушного суднаaircraft registration markбригада для перегонки воздушных судовdelivery groupбригада технического обслуживания воздушных судовaircraft maintenance teamбуксировать воздушное судно хвостом впередpush the aircraft backбуксировочный узел воздушного суднаaircraft towing pointвал воздушного винтаpropeller shaftвводить воздушное судно в кренroll in the aircraftведомость дефектов воздушного суднаaircraft defects listвектор воздушной скоростиairspeed vectorверхнее воздушное пространство1. upper air2. upper air area весовая категория воздушного суднаaircraft weight categoryвесовая классификация воздушного суднаaircraft breakdownвзаимодействие воздушных потоковair flow interactionвид воздушного суднаaircraft categoryвинтовое воздушное судноprop-driven aircraftвладелец сертификата на воздушное судноaircraft certificate holderвлияние спутной струи от воздушного винтаslipstream effectвлиять на состояние воздушного суднаeffect on an aircraftвместимость воздушного суднаaircraft capacityвне воздушной трассыoff-airwayвнезапное отклонение воздушного суднаaircraft sudden swerveвнимание, отвлеченное от управления воздушным судномdiverted attention from operationвозвращать воздушное судноbring the aircraft backвоздушная болезньairsicknessвоздушная волнаair waveвоздушная заслонкаair flapвоздушная зонаair sideвоздушная линияair lineвоздушная массаair massвоздушная обстановкаair situationвоздушная обстановка в зоне аэродромаaerodrome air pictureвоздушная опораair bearingвоздушная перевозка1. air carriage2. air conveyance 3. air movement 4. skylift воздушная перевозка за платуair operation for remunerationвоздушная перевозка по наймуair operation for hireвоздушная перевозка типа инклюзив турinclusive tourвоздушная подушкаair cushionвоздушная подушка у землиground cushionвоздушная почтаair mailвоздушная пробкаair lockвоздушная система запуска двигателейair starting systemвоздушная скоростьairspeedвоздушная смесительная камераair-mixing chamberвоздушная трасса1. airway2. air track 3. skyway 4. air lane 5. air route 6. air path воздушная турбинаair turbineвоздушная турбулентностьair turbulenceвоздушная ударная волнаair blastвоздушная цельair targetвоздушная ямаair pocketвоздушная яма на пути полетаin flight bumpвоздушное барражированиеair loiteringвоздушное движение1. air traffic2. traffic flow воздушное охлаждениеair coolingвоздушное пиратствоair piracyвоздушное правоair lawвоздушное пространство1. airspace2. midair воздушное пространство с запретом визуальных полетовvisual exempted airspaceвоздушное путешествие1. air trip2. air travel воздушное сообщениеair communicationвоздушное судно1. aircraft2. ship воздушное судно без экипажаbare hullвоздушное судно большой вместимостиhigh-capacity aircraftвоздушное судно большой дальности полетовlong-distance aircraftвоздушное судно вертикального взлета и посадкиvertical takeoff and landing aircraftвоздушное судно в зоне ожиданияholding aircraftвоздушное судно в полете1. in-flight aircraft2. making way aircraft 3. aircraft on flight воздушное судно вспомогательной авиалинииfeeder aircraftвоздушное судно, выведенное из строяdisabled aircraftвоздушное судно государственной принадлежностиstate aircraftвоздушное судно, готовое к полетуunder way aircraftвоздушное судно гражданской авиацииcivil aircraftвоздушное судно для местный авиалинийshort-range aircraftвоздушное судно для местных авиалинийshort-haul transportвоздушное судно для обслуживания местных авиалинийfeederlinerвоздушное судно для патрулирования лесных массивовforest patrol aircraftвоздушное судно для полетов на большой высотеhigh-altitude aircraftвоздушное судно для смешанных перевозокcombination aircraftвоздушное судно, дозаправляемое в полетеreceiver aircraftвоздушное судно, загруженное не по установленной схемеimproperly loaded aircraftвоздушное судно, занесенное в реестрaircraft on registerвоздушное судно, идущее впередиpreceeding aircraftвоздушное судно, идущее следомfollowing aircraftвоздушное судно, имеющее разрешение на полетauthorized aircraftвоздушное судно, исключенное из реестраabandoned aircraftвоздушное судно короткого взлета и посадкиshort takeoff and landing aircraftвоздушное судно, летящее курсом на востокeastbound aircraftвоздушное судно местных воздушных линийcommuter-size aircraftвоздушное судно на подходеin-coming aircraftвоздушное судно - нарушительintruderвоздушное судно, находящееся в воздухеairborne aircraftвоздушное судно, находящееся в эксплуатации владельцаowner-operated aircraftвоздушное судно, находящееся на встречном курсеoncoming aircraftвоздушное судно небольшой массыlight aircraftвоздушное судно, не сертифицированное по шумуnonnoise certificate aircraftвоздушное судно, нуждающееся в помощиaircraft requiring assistanceвоздушное судно обнаруженияspotter(цели) воздушное судно общего назначенияgeneral-purpose aircraftвоздушное судно обычной схемы взлета и посадкиconventional takeoff and landing aircraftвоздушное судно, оставшееся на плавуstayed afloat aircraftвоздушное судно, отвечающее современным требованиямtoday's aircraftвоздушное судно первого поколенияfirst-generation aircraftвоздушное судно, получившее разрешениеcleared aircraftвоздушное судно по обменуinterchanged aircraftвоздушное судно, прибывающее в конечный аэропортterminating aircraftвоздушное судно, пропавшее без вестиaircraft in missingвоздушное судно с верхним расположением крылаhigh-wing aircraftвоздушное судно с газотурбинными двигателямиturbine-engined aircraftвоздушное судно с двумя двигателямиtwin-engined aircraftвоздушное судно с двумя и более двигателямиmultiengined aircraftвоздушное судно с неподвижным крыломfixed-wing aircraftвоздушное судно с несущим винтомrotary-wing aircraftвоздушное судно с несущим фюзеляжемlift-fuselage aircraftвоздушное судно с низким расположением крылаlow-wing aircraftвоздушное судно, совершающее заход на посадкуapproaching aircraftвоздушное судно с одним двигателем1. one-engined aircraft2. single-engined aircraft воздушное судно с одним пилотомsingle-pilot aircraftвоздушное судно, создающее опасность столкновенияintruding aircraftвоздушное судно со складывающимся крыломfolding wing aircraftвоздушное судно со средним расположением крылаmid-wing aircraftвоздушное судно с поршневым двигателемpiston-engined aircraftвоздушное судно с треугольным крыломdelta-wing aircraftвоздушное судно с турбовинтовыми двигателямиturboprop aircraftвоздушное судно с турбореактивными двигателямиturbojet aircraftвоздушное судно с убранной механизацией крылаclean aircraftвоздушное судно с удлиненным фюзеляжемstretched aircraftвоздушное судно с узким фюзеляжемnarrow-body aircraftвоздушное судно с фюзеляжем типовой схемыregular-body aircraftвоздушное судно схемы летающее крыло1. all-wing aircraft2. tailless aircraft воздушное судно схемы уткаcanard aircraftвоздушное судно считается пропавшим без вестиaircraft is considered to be missingвоздушное судно с экипажем из нескольких человекmulticrew aircraftвоздушное судно, терпящее бедствиеaircraft in distressвоздушное судно, удовлетворяющее требованиям сохранения окружающей средыenvironmentally attuned aircraftвоздушное судно укороченного взлета и посадкиreduced takeoff and landing aircraftвоздушное таксиair taxiвоздушное уплотнениеair sealвоздушное уплотнение опорыbearing air sealвоздушные винты противоположного вращенияcontrarotating propellersвоздушные воротаair gateвоздушные перевозкиairliftвоздушные перевозки большой протяженностиlong-haul serviceвоздушные перевозки вертолетомrotorcraft operationsвоздушные перевозки малой протяженностиshort-haul serviceвоздушные перевозки с большим количеством промежуточных остановокmultistop serviceвоздушные перевозки средней протяженностиmedium-haul serviceвоздушные перевозки типа инклюзив турinclusive tour trafficвоздушный буксирaerotowвоздушный винт1. airscrew2. prop 3. propeller воздушный винт во флюгерном положенииfeathered propellerвоздушный винт двусторонней схемыdoubleacting propellerвоздушный винт изменяемого шага1. adjustable-pitch propeller2. variable pitch propeller 3. controllable propeller воздушный винт левого вращенияleft-handed propellerвоздушный винт на режиме малого газаidling propellerвоздушный винт постоянного числа оборотовconstant-speed propellerвоздушный винт правого вращенияright-handed propellerвоздушный винт прямой тягиdirect drive propellerвоздушный винт с автоматически изменяемым шагомautomatic pitch propellerвоздушный винт с автоматической регулировкойautomatically controllable propellerвоздушный винт с большим шагомhigh-pitch propellerвоздушный винт с гидравлическим управлением шагаhydraulic propellerвоздушный винт фиксированного шага1. constant-pitch propeller2. fixed-pitch propeller воздушный дроссельthrottle airвоздушный клапанair valveвоздушный кодексair codesВоздушный кодексAir laws regulationsвоздушный коллектор1. air manifold2. air manifold pipe 3. air collector 4. pneumatic manifold воздушный коридорair corridorвоздушный лайнерairlinerвоздушный перевозчикair carrierвоздушный поток1. airflow2. airstream 3. air flow воздушный радиаторair coolerвоздушный редукторair pressure valveвоздушный стартерair starterвоздушный трактair flow ductвоздушный транспортair transportвоздушный участокairborne partвоздушный участок траекторииairborne pathвоздушный фильтрair filterвоздушный флотair fleetвозмущение воздушного потокаair distortionвосстанавливать воздушное судноrestore an aircraftвосходящий воздушный потокanabatic windвосходящий порыв воздушной массыair-up gustВПП для эксплуатации любых типов воздушных судовall-service runwayвращать воздушный винтdrive a propellerвредное воздействие шума от воздушных судовaircraft noise pollutionвремя прекращения действия ограничения на воздушное движениеtraffic release timeвсепогодное воздушное судноall-weather aircraftвспомогательная бортовая система воздушного суднаassociated aircraft systemвтулка воздушного винта1. propeller hub2. airscrew hub 3. airscrew boss входное воздушное устройствоair inlet section(двигателя) вывешивать воздушное судноlift an aircraft onвывешивать воздушное судно на подъемникахjack an aircraftвыводить воздушное судно из крена1. bring the aircraft out2. roll out the aircraft выводить воздушное судно из сваливания на крылоunstall the aircraftвыводить воздушное судно на заданный курсput the aircraft on the courseвыводить воздушный винт из флюгерного положенияunfeather the propellerвыдерживать воздушное судноkeep the aircraft onвыдерживать воздушное судно на заданном курсеhold the aircraft on the headingвылетающее воздушное судно1. departing aircraft2. originating aircraft 3. outbound aircraft 4. outward aircraft вынужденная посадка воздушного судна на водуaircraft ditchingвыполнять работу на воздушном суднеwork on the aircraftвыполнять этап пробега воздушного суднаroll on the aircraftвыравнивать воздушное судно1. ease the aircraft on2. level the aircraft out выруливать воздушное судноlead out the aircraftвыруливать воздушное судно на исполнительный стартline up the aircraftвысотное воздушное пространствоspecified upper-air layerвысотный воздушный винтaltitude propellerвыставка технического оборудования для обслуживания воздушных судовaircraft maintenance engineering exhibitionвычислитель воздушной скоростиair-speed computerвычислитель воздушных сигналовair data computerгарантийный срок воздушного суднаaircraft warrantyгерметизированное воздушное судноpressurized aircraftгерметичность воздушного суднаaircraft tightnessгидравлическое управление шагом воздушного винтаhydraulic propeller pitch controlгидровариант воздушного суднаsea aircraftгидроподъемник для воздушного суднаaircraft hydraulic jackгиперзвуковое воздушное судноhypersonic aircraftгироскоп с воздушной опорой осейair bearing gyroscopeГлавное агентство воздушных сообщенийCentral Agency of Air Serviceгосударственная система организации воздушного пространстваnational airspace systemгосударственный опознавательный знак воздушного суднаaircraft nationality markгосударство - изготовитель воздушного суднаstate of aircraft manufactureгосударство - поставщик воздушного суднаaircraft provider stateгосударство регистрации воздушного суднаaircraft registry stateгосударство - эксплуатант воздушного суднаaircraft user stateготовность воздушного суднаaircraft readinessгражданский воздушный транспортcivil air transportграница зоны управления воздушным движениемair traffic control boundaryграфик воздушного путешествияair travel planграфик движения воздушного транспортаair transport movement tableгруз для воздушной перевозкиair cargoгрузовое воздушное судно1. all-cargo aircraft2. air freighter 3. freight aircraft грузовое воздушное судно с откидной носовой частьюbow-loaderгрузопассажирское воздушное судноconvertible aircraftгруз, перевозимый воздушным судномaircraft freightгруппа прогнозирования воздушного движенияtraffic forecast groupдавать воздушному судну правоenable the aircraft toдавать разрешение воздушному суднуclear the aircraftдальность полета воздушного суднаaircraft rangeданные воздушных перевозокtraffic summaryданные о результатах испытаний воздушного суднаaircraft test dataдата обнаружения пропавшего воздушного суднаaircraft recovery dateдатчик воздушной скорости1. airspeed sensor2. airspeed transmitter датчик воздушных сигналовair-data sensorдвижение воздушного суднаaircraft movementдвухпалубное воздушное судноdouble-decker aircraftдвухфюзеляжное воздушное судноtwin-fuselage aircraftдействующая воздушная трассаeffective air pathдержать воздушное судно готовымmaintain the aircraft at readiness toдержаться на безопасном расстоянии от воздушного суднаkeep clear of the aircraftдеформация конструкции воздушного суднаaircraft structural deformationдиаграмма воздушных потоковair-flow patternдиспетчер воздушного движенияflight dispatcherдиспетчерский центр управления воздушным движениемair traffic control centerдиспетчерский центр управления потоком воздушного движенияflow control centerдиспетчерское обслуживание воздушного пространстваair controlдиспетчер службы управления воздушным движениемair traffic controllerдисплей индикации воздушной обстановкиair situation displayдистанционное управление воздушным судномflight monitoringдозвуковое воздушное судноsubsonic aircraftдонесение о состоянии парка воздушных судовaircraft status reportдопускать воздушное судно к дальнейшей эксплуатации1. consider an aircraft serviceable2. return the aircraft to service допуск на массу воздушного суднаaircraft weight toleranceдопуск на размеры воздушного суднаaircraft dimension toleranceдорабатывать конструкцию воздушного суднаafter an aircraftдоработка воздушного суднаaircraft retrofitдоход на единицу воздушной перевозкиrevenue per traffic unitЕвропейская группа прогнозирования воздушного движенияEuropean air traffic forecast Groupединица воздушной перевозкиtraffic unitзавихрение воздушной массыwhirlwindзагруженное воздушное судноladen aircraftзагрузка воздушного суднаaircraft ladingзаземление воздушного суднаaircraft earthingзаказчик воздушного суднаaircraft customerзакрытый воздушный винтshrouded propellerзамена парка воздушных судовfleet updatingзаменять воздушное судноsubstitute the aircraftзаменять оборудование воздушного суднаreequip an aircraftзаносить воздушное судно в реестрenter the aircraftзапасные части для воздушного суднаaircraft spare partзапас прочности воздушного суднаaircraft reserve factorзапас топлива воздушного суднаaircraft fuel quantityзапас управляемости воздушного суднаaircraft control marginзапускать воздушное судно в производствоput the aircraft into productionзарегистрированное воздушное пространствоspecified airspaceзарезервированное воздушное пространствоreserved airspaceзаруливать воздушное судноlead in the aircraftзаруливать на место стоянки воздушного суднаenter the aircraft standзасветка воздушного суднаaircraft flashзасекать воздушное судноplot the aircraftзатормаживать воздушный потокbring to rest airзафрахтованное воздушное судноchartered aircraftзачехлять воздушное судноcover an aircraft withзащита воздушного судна от угонаaircraft hijack protectionзвукоизоляция воздушного суднаaircraft sound proofingзона аэродромного управления воздушным движениемaerodrome traffic control zoneзона воздушного барражированияair patrol zoneзона воздушного движенияtraffic zoneзона воздушного пространства с особым режимом полетаairspace restricted areaзона движения воздушных судовaerodrome movement areaзона интенсивного воздушного движенияcongested areaзона управления воздушным движениемair traffic control areaизнос воздушного суднаageing aircraftизносостойкий воздушный подшипникmaintenance-free air bearingиндикатор наземного движения воздушных судовaircraft surface movement indicatorиндикаторная воздушная скорость1. rectified airspeed2. calibrate airspeed индикация воздушных целейair target indicationинженер по техническому обслуживанию воздушных судовaircraft maintenance engineerинструкция по загрузке воздушного суднаaircraft loading instructionинструкция по консервации и хранению воздушного суднаaircraft storage instructionинструкция по эксплуатации воздушного суднаaircraft operating instructionинтенсивное воздушное движениеhigh density air trafficинтенсивное регулярное воздушное сообщениеairbridgeинтенсивность воздушного движения1. traffic flow rate2. air-traffic intensity информация по воздушной трассеairway informationисправленная воздушная скоростьcorrected airspeedиспытание воздушного судна в термобарокамереaircraft environmental testиспытания воздушного судна на перегрузкиaircraft acceleration testsиспытания воздушного судна на переменные нагрузкиaircraft alternate-stress testsиспытательная станция воздушных судовaircraft test stationиспытываемое воздушное судноtest aircraftисследование конфликтной ситуации в воздушном движенииair conflict searchисследовательское воздушное судноresearch aircraftистинная воздушная скоростьtrue airspeedисходная масса пустого воздушного суднаbasic empty weightклассификационная отметка воздушного суднаaircraft ratingклассификация воздушных судовaircraft classificationклассификация воздушных судов по типамaircraft category ratingкольцевой обтекатель воздушного винтаairscrew antidrag ringкольцо воздушного лабиринтного уплотненияair labyrinth seal ringкомандир воздушного суднаaircraft commanderкомбинированный тип воздушного суднаcomplex type of aircraftкомель лопасти воздушного винтаpropeller blade shankКомитет по воздушным перевозкам1. Air Transport Committee2. Air Transportation Board коммерческая воздушная перевозкаcommercial air transportationкоммерческие воздушные перевозки1. commercial air transport operations2. revenue traffic коммерческий воздушный транспортcommercial air transportкоммерческое воздушное судноprofitable aircraftкоммерческое реактивное воздушное судноcommercial jetкомплексная система контроля воздушного пространстваintegrated system of airspace controlкомплект оборудования для удаления воздушного суднаaircraft recovery kitкомпоновка воздушного суднаaircraft layoutконвенция по управлению воздушным движениемair traffic conventionконструкция воздушного судна1. aircraft design2. aircraft structure консультативная информация о воздушном движенииtraffic advisory informationконсультативное воздушное пространствоadvisory airspaceконсультативное обслуживание верхнего воздушного пространстваupper advisory serviceконсультативное обслуживание воздушного движенияtraffic advisory serviceконсультативное сообщение о воздушной обстановкеtraffic advisoryконсультативное сообщение о воздушной обстановке, регистрируемой на первичной РЛСtraffic advisory against primary radar targetsКонсультативный комитет по управлению воздушным движениемAir Traffic Control Advisory Committeeконтактное кольцо воздушного винтаpropeller slip ringконтейнер для перевозки грузов и багажа на воздушном суднеaircraft containerконтракт на воздушную перевозкуair carriage contractконтролируемое воздушное пространствоcontrolled airspaceконтролируемое воздушное пространство предназначенное для полетов по приборамinstrument restricted airspaceконтроль качества изготовления воздушных судовaircraft production inspectionконтуры воздушного суднаaircraft geometryконфигурация базовой модели воздушного суднаbaseline aircraft configurationконцевой выключатель в системе воздушного суднаaircraft limit switchкоэффициент загрузки воздушного суднаaircraft load factorкоэффициент заполнения воздушного винтаpropeller solidity ratioкоэффициент использования воздушного суднаaircraft usability factorкоэффициент перегрузки воздушного суднаaircraft acceleration factorкрен воздушного судна1. aircraft heel2. aircraft roll 3. aircraft list крутящий момент воздушного винта1. propeller torque2. airscrew torque крутящий момент воздушного винта в режиме авторотацииpropeller windmill torqueкурс воздушного судна1. aircraft course2. aircraft heading ламинарность воздушного потокаflow laminarityлегкоуправляемое воздушное судноhandy aircraftлетательный аппарат на воздушной подушкеair-cushion vehicleлетать на воздушном суднеfly by an aircraftлетно-технические характеристики воздушного суднаaircraft performancesлиния заруливания воздушного судна на стоянкуaircraft stand lead-in lineлиния положения воздушного суднаaircraft position lineлиния руления воздушного судна в зоне стоянкиaircraft stand taxilaneлиния технологического разъема воздушного суднаaircraft production break lineлицензированное воздушное судноlicensed aircraftлопасть воздушного винтаpropeller bladeл управления шагом воздушного винтаpropeller pitch control systemмагистральная воздушная линияhighwayмагистральная воздушная трассаtrunk routeмакет воздушного суднаaircraft mockupмалошумное воздушное судноlow annoyance aircraftмалошумный воздушный винтsilenced tractor propellerманевренность воздушного суднаaircraft manoeuvrabilityмаркировка места стоянки воздушного суднаaircraft stand markingмаршрут верхнего воздушного пространстваupper air routeмаршрут вне воздушной трассыoff-airway routeмаршрут нижнего воздушного пространстваlow air routeмаршрутный лист воздушного путешествияair travel cardмаршрут, обслуживаемый службой воздушного движенияair traffic service routeмаршрут перегонки воздушных судовair ferry routeмаршрут управления воздушным движениемATC routeмасса пустого воздушного судна1. base weight2. empty weight 3. aircraft empty weight масса пустого воздушного судна при поставкеdelivery empty weightмасса снаряженного воздушного судна без пассажировaircraft operational weightмастерская капитального ремонта воздушных судовaircraft overhaul shopМеждународная ассоциация воздушного транспортаInternational Air TransportМеждународный совет ассоциаций владельцев воздушных судов и пилотовInternational Council of Aircraft Owner and Pilot Associationsместный воздушный вихрьlocal whirlwindместо загрузки воздушного суднаaircraft's loading positionместо остановки воздушного суднаaircraft standместоположение воздушного суднаaircraft fixместо стоянки воздушного судна1. aircraft parking place2. aircraft's parking position место стоянки воздушного судна носом к аэровокзалуnose-in aircraft standместо стоянки воздушного судна хвостом к аэровокзалуnose-out aircraft standместо установки домкрата для подъема воздушного суднаaircraft jacking pointмеханизм реверса воздушного винтаpropeller reverserмеханизм реверса воздушного потока вентилятораfan jet reverserмеханизм реверсирования воздушного винтаairscrew reversing gearмеханизм синхронизации работы воздушного винтаpropeller synchronization mechanismминимум воздушного суднаaircraft minimaминимум командира воздушного суднаpilot-in-command minimaмногоцелевое воздушное судно1. multipurpose aircraft2. all-purpose aircraft многоцелевое реактивное воздушное судноall-purpose jetlinerмоделирование воздушного движенияart traffic simulationмодель воздушного суднаaircraft modelмодифицированное воздушное судно1. derived aircraft2. modified aircraft моечная установка для воздушных судовaircraft washing plantмонтировать на воздушном суднеinstall on the aircraftнаблюдение за воздушным пространствомair observationнаблюдение с борта воздушного суднаaircraft observationнадежность воздушного суднаaircraft reliabilityнаправление воздушного потокаairflow directionнаправлять воздушное судно против ветраhead the aircraft into windнарушение воздушного пространстваair intrusionнарушение поперечной центровки воздушного суднаaircraft lateral inbalanceнаставление по управлению воздушным движениемair traffic guideнегерметизированное воздушное судноunpressurized aircraftнезаконно захваченное воздушное судноunlawfully seized aircraftнезаконный захват воздушного суднаaircraft unlawful seizureнеконтролируемое воздушное пространствоuncontrolled airspaceнеполная загрузка воздушного суднаaircraft underloadingнеремонтопригодное воздушное судноirrepairable aircraftнесбалансированное воздушное судноout-of-balance aircraftнесбалансированный воздушный винтout-of-balance propellerнестандартный тип воздушного суднаinconventional type of aircraftнеуправляемость воздушного суднаaircraft uncontrollabilityнивелировочная точка воздушного суднаaircraft leveling pointнижнее воздушное пространство1. lower airspace2. low air area нисходящий воздушный поток1. katabatic wind2. fall wind нисходящий порыв воздушной массыair-down gustносовая часть воздушного суднаaircraft nose sectionобеспечение эшелонирования полетов воздушных судовaircraft separation assuranceоблегченный воздушный винтlower pitch propellerобледенение воздушного суднаaircraft icingобмен воздушными судамиaircraft interchangeобнаружение и удаление воздушного суднаaircraft recoveryобозначение места остановки воздушного суднаaircraft stand identificationобозначенное воздушное пространствоdesignated airspaceоборот парка воздушных судовaircraft fleet turnoverоборудование воздушных трассairways facilitiesоборудование для обслуживания воздушного суднаaircraft servicing equipmentоборудование места стоянки воздушного суднаaircraft parking equipmentоборудовать воздушное судно1. equip an aircraft with2. fit an aircraft with обратное вращение воздушного винтаairscrew reverse rotationобслуживание воздушного суднаaircraft servicingобтекатель втулки воздушного винтаpropeller domeобщий вид воздушного суднаaircraft main viewобщий налет на определенном типе воздушного суднаon-type flight experienceобщий поток воздушных перевозокgeneral trafficобъем воздушных перевозка в тоннах грузаairlift tonnageобъем воздушных перевозок1. traffic handling capacity2. lift capacity 3. air traffic performance ограничение воздушного пространстваairspace restrictionограничение потока воздушного движенияflow restrictionограничения на воздушных трассахair rote limitationsограниченное воздушное пространствоrestricted airspaceодноместное воздушное судноsingle-seater aircraftоколозвуковое воздушное судноtransonic aircraftокружная скорость законцовки воздушного винтаpropeller tip speedокружная скорость лопасти воздушного винтаairscrew blade speedопознавание воздушного суднаaircraft identificationопознавательный знак места стоянки воздушного суднаaircraft stand identification signопознавать воздушное судноidentify the aircraftопределение местонахождения воздушного судна по звездамastrofixопределять границы воздушного пространстваto define the airspaceопределять зону полета воздушного суднаspace the aircraftопытный вариант воздушного судна1. prototype aircraft2. preproduction aircraft 3. aircraft prototype 4. experimental aircraft орган обеспечения безопасности на воздушном транспортеaviation security authorityосветительное оборудование воздушного суднаaircraft electrificationосевая линия воздушного суднаaircraft center lineосновной вариант воздушного суднаbasic aircraftосновной режим воздушного пространстваdominant air modeосновные технические данные воздушного суднаaircraft basic specificationsостановка воздушного суднаaircraft stopось симметрии воздушного суднаaircraft axisотбалансированное воздушное судноtrimmedотказ электросистемы воздушного суднаaircraft electrical failureоткрытый воздушный винтunshrouded propellerотметка местоположения воздушного суднаaircraft positionотносительная воздушная скоростьrelative airspeedотрицательная тяга воздушного винтаpropeller dragотрывать воздушное судно от земли1. unstick the aircraft2. make the aircraft airborne отрывать переднюю опору шасси воздушного суднаrotate the aircraftотчет о воздушных перевозкахtraffic reportочаг пожара на воздушном суднеaircraft fire pointпарк воздушных судовaircraft fleetпарковать воздушное судноpark an aircraftпарковка воздушного суднаaircraft parkingпассажирские воздушные перевозкиpassenger operationsпассажирское воздушное судноpassenger aircraftпатрульное воздушное судноpatrol aircraftпеленг воздушного суднаaircraft bearingпеленгование воздушного суднаaircraft settingпереводить воздушное судно в горизонтальный полетput the aircraft overперевозимый на воздушном шареplaneborneперегружать воздушное движениеoverflow air trafficперегруженное воздушное судноoverweight aircraftпередача воздушного суднаaircraft blind transmissionпередача информации о воздушном движенииtraffic information broadcastпередача управления воздушным судномaircraft control transferпереоборудовать воздушное судноconvert an aircraftпересечение воздушных трассintersection of air routesперехват гражданского воздушного суднаinterception of civil aircraftперсонал диспетчерской службы воздушного движенияtraffic control personnelперспектива развития парка воздушных судовfleet developmentпилотировать воздушное судноfly the aircraftпилотируемое воздушное судноmanned aircraftпилот, управляющий воздушным судномpilot on the controlsплан восстановления воздушного суднаaircraft recovery planпланетарный редуктор воздушного винтаpropeller planetary gearпланирование воздушного судна по спиралиaircraft spiral glideплан развития воздушных перевозокair planплотность воздушного движенияair traffic densityплотность размещения кресел на воздушном суднеaircraft seating densityплощадь, ометаемая воздушным винтомpropeller disk areaпневматическая система воздушного суднаaircraft pneumatic systemповедение воздушного суднаaircraft behaviorповреждать конструкцию воздушного суднаdamage aircraft structureповрежденное воздушное судноdamaged aircraftподача топлива в систему воздушного суднаaircraft fuel supplyподниматься на борт воздушного суднаboard an aircraftпозывной код воздушного суднаaircraft call signпоисково-спасательное воздушное судно1. rescue aircraft2. search and rescue aircraft поисковый радиолокатор воздушных судовair-search radarпокидать воздушное судно1. ball2. abandon an aircraft покидать данное воздушное пространствоleave the airspaceпоколение воздушных судовaircraft generationполезная нагрузка воздушного суднаaircraft useful loadполетный лист воздушного суднаaircraft flight reportполет, открывающий воздушное сообщениеinaugural flightполет с частного воздушного суднаprivate flightполеты воздушных судовaircraft flyingполеты гражданских воздушных судовcivil air operationsполеты по воздушным трассамairways flyingпол кабины воздушного суднаaircraft deckполномасштабная модель воздушного суднаfull-scalle aircraftположение в воздушном пространствеair positionполомка воздушного суднаaircraft wreckполоса воздушных подходовapproach funnelпо оси воздушного суднаon aircraft center lineпоправка на воздушную скоростьairspeed compensationпорыв воздушной массыair gustпосадка воздушного суднаaircraft landingпосадка с неработающим воздушным винтомdead-stick landingпоставка воздушных судовaircraft deliveryпоставлять воздушное судноvend an aircraftпотеря воздушной целиairmissпотеря тяги при скольжении воздушного винтаairscrew slip lossпотеря управляемости воздушного суднаaircraft control lossпоток воздушного движенияflow of air trafficпоток воздушных перевозок через аэропортairport traffic flowпочтовое воздушное судноmail-carrying aircraftпоэтапные воздушные перевозки1. flight-stage traffic2. traffic by flight stage правила воздушного движенияair traffic proceduresправила обслуживания воздушного движенияair traffic services proceduresправила управления воздушным движением1. air traffic control procedures2. traffic control regulations 3. traffic control instructions предварительный старт для нескольких воздушных судовmultiple-holding positionпредел коммерческой загрузки воздушного суднаaircraft capacity rangeпреднамеренное отклонение воздушного суднаaircraft intentional swerveпредоставлять права на воздушные перевозкиgrant traffic privilegesпредполагаемое повреждение воздушного суднаsuspected aircraft damageпредприятие - поставщик воздушных судовaircraft supplierпредупреждать воздушное судноwarn the aircraftпрекращать контроль воздушного суднаrelease the aircraftприборная воздушная скорость1. basic airspeed2. indicated airspeed приборное оборудование воздушного суднаaircraft hardwareприбор предупреждения столкновений воздушных судовaircraft anticollision deviceприбывающее воздушное судно1. arriving aircraft2. inbound aircraft 3. inward aircraft приводить воздушное судно в состояние летной годностиreturn an aircraft to flyable statusпригодность для полета на местных воздушных линияхlocal availabilityприемник воздушного давления1. airspeed boom2. airspeed head 3. Pilot tube boom 4. airspeed tube приземлять воздушное судноland the aircraftпричина неисправности воздушного суднаcause of aircraft troubleпроводить доработку воздушного суднаaircraft embodyпроворачивать воздушный винтwind upпрогноз для верхнего воздушного пространстваupper-air forecastпродолжительность обслуживания воздушного суднаaircraft service periodпроизводство воздушных судовaircraft productionпроисшествие на территории государства регистрации воздушного суднаdomestic accidentпроисшествие с воздушным судномaccident to an aircraftпропавшее воздушное судноmissing aircraftпропускная способность воздушного пространстваairspace capacityпросадка воздушного суднаaircraft mushпрямое воздушное сообщениеthrough air serviceпункт обслуживания воздушного движенияair traffic services unitпункт управления воздушным движениемair traffic control unitрабочая часть лопасти воздушного винтаblade pressure sideрадиозондовое наблюдение за состоянием воздушных массrawinsonde observationрадиолокатор управления воздушным движениемair traffic control radarразворот воздушного суднаaircraft pivotingразгерметизация воздушного суднаaircraft decompressionразгруженное воздушное судноunladen aircraftраздвоенный воздушный трактbifurcated air bypass ductраздражающее воздействие шума от воздушного судaircraft noise annoyanceразмещать в воздушном суднеfill an aircraft withразмещать воздушное судно1. accommodate an aircraft2. house an aircraft размещение воздушных судно на стоянкеparking arrangementразрешение воздушному суднуclearance of the aircraftразрешение на выполнение воздушных перевозокoperating permitразрешение на эксплуатацию воздушной линииroute licenseразрешение службы управления воздушным движениемair traffic control clearanceрайон воздушных трассair-route areaрайон полетов верхнего воздушного пространстваupper flight regionраскачивание воздушного суднаaircraft overswingingраспределение воздушного пространстваair spacing(для обеспечения контроля полетов) распределение загрузки воздушного суднаaircraft load distributionрасстояние от воздушного судна до объекта на землеair-to-ground distanceрасфлюгирование воздушного суднаpropeller unfeatheringрасход топлива воздушным судномaircraft fuel consumptionрасходы на аренду воздушного суднаaircraft rental costsрасчетная воздушная скоростьdesign airspeedрасчетное положение воздушного суднаestimated position of aircraftрасчетный предел нагрузки воздушного суднаaircraft design loadреактивное воздушное судно1. jet aircraft2. jet 3. jetliner реактивное воздушное судно для обслуживания местных авиалинийfeederjetреактивное воздушное судно с низким расходом топливаeconomical-to-operate jetlinerреверсивный воздушный винт1. negative thrust propeller2. reversible-pitch propeller регистратор воздушной скоростиair-speed recorderрегистрация воздушного суднаaircraft registrationрегистрировать воздушное судноregister the aircraftрегулярное воздушное сообщениеregular airline serviceрегулярные воздушные перевозкиscheduled air serviceрегулятор оборотов воздушного винтаpropeller governorрегулятор числа оборотов воздушного винтаpropeller control unitредуктор воздушного винта1. propeller gearbox2. airscrew reduction gear 3. propeller gear режим воздушного потока в заборнике воздухаinlet airflow scheduleрезервирование воздушного пространстваairspace reservationрезервное воздушное судноstandby aircraftрезервное оборудование воздушного суднаaircraft standby facilitiesрейс с гражданского воздушного суднаcivil flightрекламный проспект воздушного суднаaircraft leafletремонт воздушного суднаaircraft overhaulремонт оборудования воздушного суднаaircraft equipment overhaulресурсные испытания воздушного суднаaircraft endurance testsруководство по полетам воздушных судов гражданской авиацииcivil air regulationsруководство по технической эксплуатации воздушного суднаaircraft maintenance guideрулящее воздушное судноtaxiing aircraftсанитарное воздушное судно1. ambulance aircraft2. hospital aircraft санитарный контроль воздушных судовaircraft sanitary controlсбалансированное воздушное судноbalanced aircraftсборник пассажирских тарифов на воздушную перевозкуAir Passenger Tariffсборочный стапель воздушного суднаaircraft assembly jigсверхзвуковое воздушное судноsupersonic aircraftсверхзвуковой воздушный транспортsupersonic transportсвойственный воздушному суднуinherent in the aircraftсебестоимость воздушного суднаaircraft cost levelсебестоимость производства воздушного суднаaircraft first costсектор воздушного пространстваairspace segmentСекция аэродромов, воздушных трасс и наземных средствAerodromes, Air Routes and Ground Aids Section(ИКАО) Секция исследования воздушного транспортаAir Transport Studies Section(ИКАО) Секция тарифов воздушных перевозчиковAir Carrier Tariffs Section(ИКАО) серийный вариант воздушного суднаproduction aircraftсерия воздушных судовaircrafts batchсертификат воздушного суднаaircraft certificateсертификат воздушного судна по шумуaircraft noise certificateсеть воздушных трассair route networkсигнал между воздушными судами в полетеair-to-air signalсистема воздушного наблюденияair surveillance systemсистема воздушного охлажденияair cooling systemсистема воздушных тормозовair brake systemсистема измерения посадочных параметров воздушного суднаaircraft landing measurement systemсистема обогрева воздушного суднаaircraft heating systemсистема оповещения о воздушном движенииtraffic alert systemсистема опознавания воздушного суднаaircraft identification systemсистема предупредительной сигнализации воздушного суднаaircraft warning systemсистема приемника воздушного давленияpitot-static systemсистема сбора воздушных параметровflight environment data system(условий полета) система сбора воздушных сигналовair data computer systemсистема управления воздушным движениемair traffic control systemсистема управления воздушным судномaircraft control systemсистема управления воздушным судном при установке на стоянкуapproach guidance nose-in to stand systemсистема флюгирования воздушного винтаpropeller feathering systemскоростное воздушное судноhigh-speed aircraftскорость воздушного суднаaircraft speedскорость движения воздушной массыair velocityслужба воздушного движенияair traffic serviceслужба воздушных сообщенийairways and air communications serviceслужба управления воздушным движениемair traffic control serviceслужебное воздушное судно1. business aircraft2. baseline aircraft смешанная воздушная перевозкаintermodal air carriageснаряженное воздушное судноtopped-up aircraftснижать высоту полета воздушного суднаpush the aircraft downснижать скорость воздушного судна доdecelerate the aircraft toснятие воздушного судна с эксплуатацииaircraft removal from serviceсовершать посадку на борт воздушного суднаjoin an aircraftсогласование объемов воздушных перевозокtraffic flow arrangementсоглашение между авиакомпаниями об аренде воздушных судовairlines leasing arrangementсоглашение об обмене воздушными суднамиintercharged aircraft agreementсоглашение о воздушном сообщенииair transport agreementсоздавать опасность для воздушного суднаendanger the aircraftсообщение о положении воздушного суднаaircraft position reportсоосный воздушный винтcoaxial propellerсопровождать воздушное судноfollow up the aircraftсопротивление движению воздушного суднаrolling resistanceсопротивление скольжению воздушного суднаaircraft skidding dragсостояние готовности воздушного судна к вылетуaircraft alert positionспасательное воздушное судноsurvival craftспециалист по ремонту воздушных судовaircraft repairmanсписание воздушного судна1. retirement of aircraft2. aircraft supersedeas спортивное воздушное судноsports aircraftспутная струя за воздушным винтомairscrew washспутная струя за воздушным судномaircraft wakeспутный след воздушного суднаaircraft trailсредства эвакуации воздушного суднаaircraft evacuation meansсрок службы воздушного суднаaircraft ageсрыв воздушного потокаairflow breakdownставить воздушный винт во флюгерное положениеfeather the propellerставить воздушный винт на полетный упорlatch the propeller flight stopставить воздушный винт на упорlatch a propellerстапель для сборки воздушного суднаaircraft fixtureстатистическая сводка воздушных перевозокtraffic flow summaryстационарная установка для обслуживания воздушного суднаaircraft servicing installationстенд балансировки воздушных винтовpropeller balancing standстепень вентиляции кабины воздушного суднаaircraft ventilation rateстепень износа воздушного суднаaircraft wearout rateстолкновение воздушного суднаaircraft impactстолкновение воздушных судовaircrafts impingementстолкновение птиц с воздушным судномbird strike to an air craftстопорить воздушный винтbrake the propellerстравливать воздушную пробкуbleed airстрагивание воздушного суднаaircraft breakawayстрахование воздушного суднаaircraft insuranceсудно на воздушной подушкеhovercraftсухой вес воздушного суднаdry weightсухопутное воздушное судноland aircraftсущественно поврежденное воздушное судноsubstantially dameged aircraftсхема воздушного движенияair traffic patternсхема воздушного поискаaerial search patternсхема воздушной обстановкиair plotсхема загрузки воздушного судна1. aircraft loading diagram2. aircraft loading chart схема обслуживания воздушного движенияair traffic service chartтаблица поправок воздушной скоростиair-speed calibration cardтарировка указателя воздушной скоростиair-speed indicator calibrationтариф на воздушную перевозку пассажираair fareтариф при регулярной воздушной перевозкиregular fareтемпература возмущенной воздушной массыstatic air temperatureтехническая аптечка воздушного суднаaircraft repair kitтехнология технического обслуживания воздушного суднаaircraft maintenance practiceтип воздушного суднаaircraft typeтолкающий воздушный винтpusher propellerтопливо без воздушных пузырьковbubble-free fuelтормоз воздушного винтаpropeller brakeтормозная характеристика воздушного судна1. aircraft stopping performance2. aircraft braking performance точка швартовки воздушного суднаaircraft tie-down pointточно опознавать воздушное судноproperly identify the aircraftтранспортное воздушное судно1. transport aircraft2. heavy aircraft транспортные средства для обслуживания воздушного суднаaircraft service truck'sтрафарет ограничения воздушной скоростиairspeed placardтренажер воздушного суднаaircraft simulatorтренировочное воздушное судноpractice aircraftтуннельный воздушный винтducting propellerтурбовинтовое реактивное воздушное судноprop jetтурбулентный след за воздушным винтомpropeller wakeтяга воздушного винта1. propeller thrust2. airscrew propulsion тянущий воздушный винтtractor propellerубирать механизацию крыла воздушного суднаclean the aircraftугол входа воздушной массыangle of indraftугол удара воздушного суднаaircraft impact angleугол установки лопасти воздушного винта1. airscrew blade incidence2. propeller incidence угон воздушного суднаhijackingудаление воздушного суднаremoval of aircraftудаление воздушной пробкиbleedingудалять воздушное судноremove the aircraftузловой район воздушного движенияair traffic hubуказания по управлению воздушным движениемair-traffic control instructionуказатель воздушной скорости1. airspeed indicator2. airspeed instrument указатель воздушной трассыairway designatorуказатель индикаторной воздушной скоростиcalibrated airspeed indicatorуказатель положения воздушного судна1. aircraft reference symbol(на шкале навигационного прибора) 2. aircraft position indicator укомплектованное воздушное судноentire aircraftуменьшение мощности двигателей воздушного суднаaircraft power reductionуменьшение ограничений в воздушных перевозкахair transport facilitationуниверсальное реактивное воздушное судноgo anywhere jetlinerуправление воздушным движением1. traffic control2. air traffic control управление воздушным движением на трассе полетаairways controlуправление воздушным судномaircraft handlingуправление потоком воздушного движенияair traffic flow managementуправление шагом воздушного винтаpropeller pitch controlуправляемое воздушное судно1. the aircraft under command2. under command aircraft управляемость воздушного суднаaircraft sensitivityуправлять воздушным судном1. control the aircraft2. steer the aircraft уровень безопасности полетов воздушного суднаaircraft safety factorусловия выполнения воздушных перевозокair traffic environmentусловия обтекания воздушным потокомairflow conditionsусловия при высокой плотности воздушного движенияhigh density traffic environmentусловно прозрачный вид воздушного суднаaircraft phantom viewусталостный ресурс воздушного суднаaircraft fatigue lifeустанавливать воздушное судно1. place the aircraft2. align the aircraft устанавливать воздушное судно по осиalign the aircraft with the center lineустанавливать воздушное судно по оси ВППalign the aircraft with the runwayустанавливать на борту воздушного суднаinstall in the aircraftустанавливать наличие воздушной пробки в системеdetermine air in a systemустанавливать шаг воздушного винтаset the propeller pitchустановившееся обтекание крыла воздушным потокомsteady airflow about the wingустановка шага лопасти воздушного винтаpropeller pitch settingустановленное повреждение воздушного суднаknown aircraft damageустановленный на воздушном суднеairborneустаревшая модель воздушного суднаoutdated aircraftустойчивость воздушной массыair stabilityустойчивый воздушный потокstable airутяжелять воздушный винтmove the blades to higherучебное воздушное судноschool aircraftучебно-тренировочное воздушное судноtraining aircraftфактическая воздушная скоростьactual airspeedфактическое положение воздушного суднаaircraft's present positionфиксатор шага лопасти воздушного винтаpropeller pitch lockфирма по производству воздушных судовaircraft companyфлюгирование воздушного винтаpropeller featheringфлюгируемый воздушный винтfeathering propellerформуляр воздушного винтаpropeller recordфрахтовать воздушное судноcharter an aircraftцельнометаллическое воздушное судноall-metal aircraftЦентральное управление международных воздушных сообщений гражданской авиацииGeneral Department of International Air Services of Aeroflotцентр обеспечения воздушной связиair communication centerцентровка воздушного суднаaircraft center - of - gravityцентровочный график воздушного суднаaircraft balance diagramцех технического обслуживания воздушных судовaircraft maintenance divisionцикл управления воздушным движениемair traffic control loopцилиндр управления воздушными тормозамиair-brake jackчелночное воздушное сообщениеshuttle serviceчетырехлопастный воздушный винтfour-bladed propellerшаг воздушного винтаpropeller pitchшвартовать воздушное судноmoor the aircraftшвартовка груза на воздушном суднеaircraft cargo lashingширокофюзеляжное воздушное судноwide-body aircraftширокофюзеляжное реактивное воздушное судно1. wide-bodied jet2. jumbo jet широта местонахождения воздушного суднаaircraft fix latitudeшкола подготовки специалистов по управлению воздушным движениемair traffic schoolштанга приемника воздушного давленияairspeed mastэвакуация воздушного судна с места аварииaircraft salvageэволюция воздушного суднаaircraft evolutionэквивалентная воздушная скоростьequivalent airspeedэкипаж воздушного суднаcrew teamэкран изображения воздушной обстановкиair displayэксперт по обслуживанию воздушного движенияair traffic services expertэксплуатационная дальность полета воздушного суднаaircraft operational rangeэксплуатационная технологичность воздушного суднаaircraft maintenance performanceэксплуатационные испытания воздушного суднаaircraft commissioning testsэксплуатационные расходы на воздушное судноaircraft operating expensesэксплуатация воздушного судна1. aircraft operation2. operation of aircraft 3. aircraft employment эксплуатировать воздушное судно1. operate an aircraft2. engage in aircraft operation эксплуатируемое воздушное судно1. active aircraft2. in-service aircraft 3. aircraft in service электрическое управление шагом воздушного винтаelectric propeller pitch controlэлектропроводка воздушного суднаaircraft leadэлектропроводка высокого напряжения на воздушном суднеaircraft high tension wiringэлектропроводка низкого напряжения на воздушном суднеaircraft low tension wiringэлектросистема воздушного суднаaircraft electric systemэлемент конструкции воздушного суднаaircraft componentэнергия порыва воздушной массыgust loadэффект воздушной подушкиair cushion effectэшелонирование полетов воздушных судовaircraft spacingэшелонировать воздушное судноseparate the aircraft96 технология коммутации
технология коммутации
-
[Интент]Современные технологии коммутации
[ http://www.xnets.ru/plugins/content/content.php?content.84]Статья подготовлена на основании материалов опубликованных в журналах "LAN", "Сети и системы связи", в книге В.Олифер и Н.Олифер "Новые технологии и оборудование IP-сетей", на сайтах www.citforum.ru и опубликована в журнале "Компьютерные решения" NN4-6 за 2000 год.
- Введение
- Коммутация первого уровня.
- Коммутация второго уровня.
- Коммутация третьего уровня.
- Коммутация четвертого уровня.
- Критерии выбора оборудования, физическая и логическая структура сети
- Качество обслуживания (QoS) и принципы задания приоритетов
- Заключение
Введение
На сегодня практически все организации, имеющие локальные сети, остановили свой выбор на сетях типа Ethernet. Данный выбор оправдан тем, что начало внедрения такой сети сопряжено с низкой стоимостью и простотой реализации, а развитие - с хорошей масштабируемостью и экономичностью.
Бросив взгляд назад - увидим, что развитие активного оборудования сетей шло в соответствии с требованиями к полосе пропускания и надежности. Требования, предъявляемые к большей надежности, привели к отказу от применения в качестве среды передачи коаксиального кабеля и перевода сетей на витую пару. В результате такого перехода отказ работы соединения между одной из рабочих станций и концентратором перестал сказываться на работе других рабочих станций сети. Но увеличения производительности данный переход не принес, так как концентраторы используют разделяемую (на всех пользователей в сегменте) полосу пропускания. По сути, изменилась только физическая топология сети - с общей шины на звезду, а логическая топология по-прежнему осталась - общей шиной.
Дальнейшее развитие сетей шло по нескольким путям:- увеличение скорости,
- внедрение сегментирования на основе коммутации,
- объединение сетей при помощи маршрутизации.
Увеличение скорости при прежней логической топологии - общая шина, привело к незначительному росту производительности в случае большого числа портов.
Большую эффективность в работе сети принесло сегментирование сетей с использованием технология коммутации пакетов. Коммутация наиболее действенна в следующих вариантах:
Вариант 1, именуемый связью "многие со многими" – это одноранговые сети, когда одновременно существуют потоки данных между парами рабочих станций. При этом предпочтительнее иметь коммутатор, у которого все порты имеют одинаковую скорость, (см. Рисунок 1).
Вариант 2, именуемый связью "один со многими" – это сети клиент-сервер, когда все рабочие станции работают с файлами или базой данных сервера. В данном случае предпочтительнее иметь коммутатор, у которого порты для подключения рабочих станций имеют одинаковую небольшую скорость, а порт, к которому подключается сервер, имеет большую скорость,(см. Рисунок 2).

Когда компании начали связывать разрозненные системы друг с другом, маршрутизация обеспечивала максимально возможную целостность и надежность передачи трафика из одной сети в другую. Но с ростом размера и сложности сети, а также в связи со все более широким применением коммутаторов в локальных сетях, базовые маршрутизаторы (зачастую они получали все данные, посылаемые коммутаторами) стали с трудом справляться со своими задачами.
Проблемы с трафиком, связанные с маршрутизацией, проявляются наиболее остро в средних и крупных компаниях, а также в деятельности операторов Internet, так как они вынуждены иметь дело с большими объемами IP-трафика, причем этот трафик должен передаваться своевременно и эффективно.
С подключением настольных систем непосредственно к коммутаторам на 10/100 Мбит/с между ними и магистралью оказывается все меньше промежуточных устройств. Чем выше скорость подключения настольных систем, тем более скоростной должна быть магистраль. Кроме того, на каждом уровне устройства должны справляться с приходящим трафиком, иначе возникновения заторов не избежать.
Рассмотрению технологий коммутации и посвящена данная статья.Коммутация первого уровня
Термин "коммутация первого уровня" в современной технической литературе практически не описывается. Для начала дадим определение, с какими характеристиками имеет дело физический или первый уровень модели OSI:
физический уровень определяет электротехнические, механические, процедурные и функциональные характеристики активации, поддержания и дезактивации физического канала между конечными системами. Спецификации физического уровня определяют такие характеристики, как уровни напряжений, синхронизацию изменения напряжений, скорость передачи физической информации, максимальные расстояния передачи информации, физические соединители и другие аналогичные характеристики.
Смысл коммутации на первом уровне модели OSI означает физическое (по названию уровня) соединение. Из примеров коммутации первого уровня можно привести релейные коммутаторы некоторых старых телефонных и селекторных систем. В более новых телефонных системах коммутация первого уровня применяется совместно с различными способами сигнализации вызовов и усиления сигналов. В сетях передачи данных данная технология применяется в полностью оптических коммутаторах.Коммутация второго уровня
Рассматривая свойства второго уровня модели OSI и его классическое определение, увидим, что данному уровню принадлежит основная доля коммутирующих свойств.
Определение. Канальный уровень (формально называемый информационно-канальным уровнем) обеспечивает надежный транзит данных через физический канал. Канальный уровень решает вопросы физической адресации (в противоположность сетевой или логической адресации), топологии сети, линейной дисциплины (каким образом конечной системе использовать сетевой канал), уведомления о неисправностях, упорядоченной доставки блоков данных и управления потоком информации.
На самом деле, определяемая канальным уровнем модели OSI функциональность служит платформой для некоторых из сегодняшних наиболее эффективных технологий. Большое значение функциональности второго уровня подчеркивает тот факт, что производители оборудования продолжают вкладывать значительные средства в разработку устройств с такими функциями.
С технологической точки зрения, коммутатор локальных сетей представляет собой устройство, основное назначение которого - максимальное ускорение передачи данных за счет параллельно существующих потоков между узлами сети. В этом - его главное отличие от других традиционных устройств локальных сетей – концентраторов (Hub), предоставляющих всем потокам данных сети всего один канал передачи данных.
Коммутатор позволяет передавать параллельно несколько потоков данных c максимально возможной для каждого потока скоростью. Эта скорость ограничена физической спецификацией протокола, которую также часто называют "скоростью провода". Это возможно благодаря наличию в коммутаторе большого числа центров обработки и продвижения кадров и шин передачи данных.
Коммутаторы локальных сетей в своем основном варианте, ставшем классическим уже с начала 90-х годов, работают на втором уровне модели OSI, применяя свою высокопроизводительную параллельную архитектуру для продвижения кадров канальных протоколов. Другими словами, ими выполняются алгоритмы работы моста, описанные в стандартах IEEE 802.1D и 802.1H. Также они имеют и много других дополнительных функций, часть которых вошла в новую редакцию стандарта 802.1D-1998, а часть остается пока не стандартизованной.
Коммутаторы ЛВС отличаются большим разнообразием возможностей и, следовательно, цен - стоимость 1 порта колеблется в диапазоне от 50 до 1000 долларов. Одной из причин столь больших различий является то, что они предназначены для решения различных классов задач. Коммутаторы высокого класса должны обеспечивать высокую производительность и плотность портов, а также поддерживать широкий спектр функций управления. Простые и дешевые коммутаторы имеют обычно небольшое число портов и не способны поддерживать функции управления. Одним из основных различий является используемая в коммутаторе архитектура. Поскольку большинство современных коммутаторов работают на основе патентованных контроллеров ASIC, устройство этих микросхем и их интеграция с остальными модулями коммутатора (включая буферы ввода-вывода) играет важнейшую роль. Контроллеры ASIC для коммутаторов ЛВС делятся на 2 класса - большие ASIC, способные обслуживать множество коммутируемых портов (один контроллер на устройство) и небольшие ASIC, обслуживающие по несколько портов и объединяемые в матрицы коммутации.
Существует 3 варианта архитектуры коммутаторов:
- переключение (cross-bar) с буферизацией на входе,
- самомаршрутизация (self-route) с разделяемой памятью
- высокоскоростная шина.
На рисунке 3 показана блок-схема коммутатора с архитектурой, используемой для поочередного соединения пар портов. В любой момент такой коммутатор может обеспечить организацию только одного соединения (пара портов). При невысоком уровне трафика не требуется хранение данных в памяти перед отправкой в порт назначения - такой вариант называется коммутацией на лету cut-through. Однако, коммутаторы cross-bar требуют буферизации на входе от каждого порта, поскольку в случае использования единственно возможного соединения коммутатор блокируется (рисунок 4). Несмотря на малую стоимость и высокую скорость продвижения на рынок, коммутаторы класса cross-bar слишком примитивны для эффективной трансляции между низкоскоростными интерфейсами Ethernet или token ring и высокоскоростными портами ATM и FDDI.


Коммутаторы с разделяемой памятью имеют общий входной буфер для всех портов, используемый как внутренняя магистраль устройства (backplane). Буферизагия данных перед их рассылкой (store-and-forward - сохранить и переслать) приводит к возникновению задержки. Однако, коммутаторы с разделяемой памятью, как показано на рисунке 5 не требуют организации специальной внутренней магистрали для передачи данных между портами, что обеспечивает им более низкую цену по сравнению с коммутаторами на базе высокоскоростной внутренней шины.

На рисунке 6 показана блок-схема коммутатора с высокоскоростной шиной, связывающей контроллеры ASIC. После того, как данные преобразуются в приемлемый для передачи по шине формат, они помещаются на шину и далее передаются в порт назначения. Поскольку шина может обеспечивать одновременную (паралельную) передачу потока данных от всех портов, такие коммутаторы часто называют "неблокируемыми" (non-blocking) - они не создают пробок на пути передачи данных.

Применение аналогичной параллельной архитектуры для продвижения пакетов сетевых протоколов привело к появлению коммутаторов третьего уровня модели OSI.
Коммутация третьего уровня
В продолжении темы о технологиях коммутации рассмотренных в предыдущем номера повторим, что применение параллельной архитектуры для продвижения пакетов сетевых протоколов привело к появлению коммутаторов третьего уровня. Это позволило существенно, в 10-100 раз повысить скорость маршрутизации по сравнению с традиционными маршрутизаторами, в которых один центральный универсальный процессор выполняет программное обеспечение маршрутизации.
По определению Сетевой уровень (третий) - это комплексный уровень, который обеспечивает возможность соединения и выбор маршрута между двумя конечными системами, подключенными к разным "подсетям", которые могут находиться в разных географических пунктах. В данном случае "подсеть" это, по сути, независимый сетевой кабель (иногда называемый сегментом).
Коммутация на третьем уровне - это аппаратная маршрутизация. Традиционные маршрутизаторы реализуют свои функции с помощью программно-управляемых процессоров, что будем называть программной маршрутизацией. Традиционные маршрутизаторы обычно продвигают пакеты со скоростью около 500000 пакетов в секунду. Коммутаторы третьего уровня сегодня работают со скоростью до 50 миллионов пакетов в секунду. Возможно и дальнейшее ее повышение, так как каждый интерфейсный модуль, как и в коммутаторе второго уровня, оснащен собственным процессором продвижения пакетов на основе ASIC. Так что наращивание количества модулей ведет к наращиванию производительности маршрутизации. Использование высокоскоростной технологии больших заказных интегральных схем (ASIC) является главной характеристикой, отличающей коммутаторы третьего уровня от традиционных маршрутизаторов. Коммутаторы 3-го уровня делятся на две категории: пакетные (Packet-by-Packet Layer 3 Switches, PPL3) и сквозные (Cut-Through Layer 3 Switches, CTL3). PPL3 - означает просто быструю маршрутизацию (Рисунок_7). CTL3 – маршрутизацию первого пакета и коммутацию всех остальных (Рисунок 8).

У коммутатора третьего уровня, кроме реализации функций маршрутизации в специализированных интегральных схемах, имеется несколько особенностей, отличающих их от традиционных маршрутизаторов. Эти особенности отражают ориентацию коммутаторов 3-го уровня на работу, в основном, в локальных сетях, а также последствия совмещения в одном устройстве коммутации на 2-м и 3-м уровнях:
- поддержка интерфейсов и протоколов, применяемых в локальных сетях,
- усеченные функции маршрутизации,
- обязательная поддержка механизма виртуальных сетей,
- тесная интеграция функций коммутации и маршрутизации, наличие удобных для администратора операций по заданию маршрутизации между виртуальными сетями.
Наиболее "коммутаторная" версия высокоскоростной маршрутизации выглядит следующим образом (рисунок 9). Пусть коммутатор третьего уровня построен так, что в нем имеется информация о соответствии сетевых адресов (например, IP-адресов) адресам физического уровня (например, MAC-адресам) Все эти МАС-адреса обычным образом отображены в коммутационной таблице, независимо от того, принадлежат ли они данной сети или другим сетям.

Первый коммутатор, на который поступает пакет, частично выполняет функции маршрутизатора, а именно, функции фильтрации, обеспечивающие безопасность. Он решает, пропускать или нет данный пакет в другую сеть Если пакет пропускать нужно, то коммутатор по IP-адресу назначения определяет МАС-адрес узла назначения и формирует новый заголовок второго уровня с найденным МАС-адресом. Затем выполняется обычная процедура коммутации по данному МАС-адресу с просмотром адресной таблицы коммутатора. Все последующие коммутаторы, построенные по этому же принципу, обрабатывают данный кадр как обычные коммутаторы второго уровня, не привлекая функций маршрутизации, что значительно ускоряет его обработку. Однако функции маршрутизации не являются для них избыточными, поскольку и на эти коммутаторы могут поступать первичные пакеты (непосредственно от рабочих станций), для которых необходимо выполнять фильтрацию и подстановку МАС-адресов.
Это описание носит схематический характер и не раскрывает способов решения возникающих при этом многочисленных проблем, например, проблемы построения таблицы соответствия IP-адресов и МАС-адресов
Примерами коммутаторов третьего уровня, работающих по этой схеме, являются коммутаторы SmartSwitch компании Cabletron. Компания Cabletron реализовала в них свой протокол ускоренной маршрутизации SecureFast Virtual Network, SFVN.
Для организации непосредственного взаимодействия рабочих станций без промежуточного маршрутизатора необходимо сконфигурировать каждую из них так, чтобы она считала собственный интерфейс маршрутизатором по умолчанию. При такой конфигурации станция пытается самостоятельно отправить любой пакет конечному узлу, даже если этот узел находится в другой сети. Так как в общем случае (см. рисунок 10) станции неизвестен МАС-адрес узла назначения, то она генерирует соответствующий ARP-запрос, который перехватывает коммутатор, поддерживающий протокол SFVN. В сети предполагается наличие сервера SFVN Server, являющегося полноценным маршрутизатором и поддерживающего общую ARP-таблицу всех узлов SFVN-сети. Сервер возвращает коммутатору МАС-адрес узла назначения, а коммутатор, в свою очередь, передает его исходной станции. Одновременно сервер SFVN передает коммутаторам сети инструкции о разрешении прохождения пакета с МАС-адресом узла назначения через границы виртуальных сетей. Затем исходная станция передает пакет в кадре, содержащем МАС-адрес узла назначения. Этот кадр проходит через коммутаторы, не вызывая обращения к их блокам маршрутизации. Отличие протокола SFVN компании Cabletron от - описанной выше общей схемы в том, что для нахождения МАС-адреса по IP-адресу в сети используется выделенный сервер.
Протокол Fast IP компании 3Com является еще одним примером реализации подхода с отображением IP-адреса на МАС-адрес. В этом протоколе основными действующими лицами являются сетевые адаптеры (что не удивительно, так как компания 3Com является признанным лидером в производстве сетевых адаптеров Ethernet) С одной стороны, такой подход требует изменения программного обеспечения драйверов сетевых адаптеров, и это минус Но зато не требуется изменять все остальное сетевое оборудование.
При необходимости передать пакет узлу назначения другой сети, исходный узел в соответствии с технологией Fast IP должен передать запрос по протоколу NHRP (Next Hop Routing Protocol) маршрутизатору сети. Маршрутизатор переправляет этот запрос узлу назначения, как обычный пакет Узел назначения, который также поддерживает Fast IP и NHRP, получив запрос, отвечает кадром, отсылаемым уже не маршрутизатору, а непосредственно узлу-источнику (по его МАС-адресу, содержащемуся в NHRP-запросе). После этого обмен идет на канальном уровне на основе известных МАС-адресов. Таким образом, снова маршрутизировался только первый пакет потока (как на рисунке 9 кратковременный поток), а все остальные коммутировались (как на рисунке 9 долговременный поток).
Еще один тип коммутаторов третьего уровня — это коммутаторы, работающие с протоколами локальных сетей типа Ethernet и FDDI. Эти коммутаторы выполняют функции маршрутизации не так, как классические маршрутизаторы. Они маршрутизируют не отдельные пакеты, а потоки пакетов.
Поток — это последовательность пакетов, имеющих некоторые общие свойства. По меньшей мере, у них должны совпадать адрес отправителя и адрес получателя, и тогда их можно отправлять по одному и тому же маршруту. Если классический способ маршрутизации использовать только для первого пакета потока, а все остальные обрабатывать на основании опыта первого (или нескольких первых) пакетов, то можно значительно ускорить маршрутизацию всего потока.
Рассмотрим этот подход на примере технологии NetFlow компании Cisco, реализованной в ее маршрутизаторах и коммутаторах. Для каждого пакета, поступающего на порт маршрутизатора, вычисляется хэш-функция от IP-адресов источника, назначения, портов UDP или TCP и поля TOS, характеризующего требуемое качество обслуживания. Во всех маршрутизаторах, поддерживающих данную технологию, через которые проходит данный пакет, в кэш-памяти портов запоминается соответствие значения хэш-функции и адресной информации, необходимой для быстрой передачи пакета следующему маршрутизатору. Таким образом, образуется квазивиртуальный канал (см. Рисунок 11), который позволяет быстро передавать по сети маршрутизаторов все последующие пакеты этого потока. При этом ускорение достигается за счет упрощения процедуры обработки пакета маршрутизатором - не просматриваются таблицы маршрутизации, не выполняются ARP-запросы.
Этот прием может использоваться в маршрутизаторах, вообще не поддерживающих коммутацию, а может быть перенесен в коммутаторы. В этом случае такие коммутаторы тоже называют коммутаторами третьего уровня. Примеров маршрутизаторов, использующих данный подход, являются маршрутизаторы Cisco 7500, а коммутаторов третьего уровня — коммутаторы Catalyst 5000 и 5500. Коммутаторы Catalyst выполняют усеченные функции описанной схемы, они не могут обрабатывать первые пакеты потоков и создавать новые записи о хэш-функциях и адресной информации потоков. Они просто получают данную информацию от маршрутизаторов 7500 и обрабатывают пакеты уже распознанных маршрутизаторами потоков.
Выше был рассмотрен способ ускоренной маршрутизации, основанный на концепции потока. Его сущность заключается в создании квазивиртуальных каналов в сетях, которые не поддерживают виртуальные каналы в обычном понимании этого термина, то есть сетях Ethernet, FDDI, Token Ring и т п. Следует отличать этот способ от способа ускоренной работы маршрутизаторов в сетях, поддерживающих технологию виртуальных каналов — АТМ, frame relay, X 25. В таких сетях создание виртуального канала является штатным режимом работы сетевых устройств. Виртуальные каналы создаются между двумя конечными точками, причем для потоков данных, требующих разного качества обслуживания (например, для данных разных приложений) может создаваться отдельный виртуальный канал. Хотя время создания виртуального канала существенно превышает время маршрутизации одного пакета, выигрыш достигается за счет последующей быстрой передачи потока данных по виртуальному каналу. Но в таких сетях возникает другая проблема — неэффективная передача коротких потоков, то есть потоков, состоящих из небольшого количества пакетов (классический пример — пакеты протокола DNS).
Накладные расходы, связанные с созданием виртуального канала, приходящиеся на один пакет, снижаются при передаче объемных потоков данных. Однако они становятся неприемлемо высокими при передаче коротких потоков. Для того чтобы эффективно передавать короткие потоки, предлагается следующий вариант, при передаче нескольких первых пакетов выполняется обычная маршрутизация. Затем, после того как распознается устойчивый поток, для него строится виртуальный канал, и дальнейшая передача данных происходит с высокой скоростью по этому виртуальному каналу. Таким образом, для коротких потоков виртуальный канал вообще не создается, что и повышает эффективность передачи.
По такой схеме работает ставшая уже классической технология IP Switching компании Ipsilon. Для того чтобы сети коммутаторов АТМ передавали бы пакеты коротких потоков без установления виртуального канала, компания Ipsilon предложила встроить во все коммутаторы АТМ блоки IP-маршрутизации (рисунок 12), строящие обычные таблицы маршрутизации по обычным протоколам RIP и OSPF.
Компания Cisco Systems выдвинула в качестве альтернативы технологии IP Switching свою собственную технологию Tag Switching, но она не стала стандартной. В настоящее время IETF работает над стандартным протоколом обмена метками MPLS (Multi-Protocol Label Switching), который обобщает предложение компаний Ipsilon и Cisco, а также вносит некоторые новые детали и механизмы. Этот протокол ориентирован на поддержку качества обслуживания для виртуальных каналов, образованных метками.
Коммутация четвертого уровня
Свойства четвертого или транспортного уровня модели OSI следующие: транспортный уровень обеспечивает услуги по транспортировке данных. В частности, заботой транспортного уровня является решение таких вопросов, как выполнение надежной транспортировки данных через объединенную сеть. Предоставляя надежные услуги, транспортный уровень обеспечивает механизмы для установки, поддержания и упорядоченного завершения действия виртуальных каналов, систем обнаружения и устранения неисправностей транспортировки и управления информационным потоком (с целью предотвращения переполнения данными из другой системы).
Некоторые производители заявляют, что их системы могут работать на втором, третьем и даже четвертом уровнях. Однако рассмотрение описания стека TCP/IP (рисунок 1), а также структуры пакетов IP и TCP (рисунки 2, 3), показывает, что коммутация четвертого уровня является фикцией, так как все относящиеся к коммутации функции осуществляются на уровне не выше третьего. А именно, термин коммутация четвертого уровня с точки зрения описания стека TCP/IP противоречий не имеет, за исключением того, что при коммутации должны указываться адреса компьютера (маршрутизатора) источника и компьютера (маршрутизатора) получателя. Пакеты TCP имеют поля локальный порт отправителя и локальный порт получателя (рисунок 3), несущие смысл точек входа в приложение (в программу), например Telnet с одной стороны, и точки входа (в данном контексте инкапсуляции) в уровень IP. Кроме того, в стеке TCP/IP именно уровень TCP занимается формированием пакетов из потока данных идущих от приложения. Пакеты IP (рисунок 2) имеют поля адреса компьютера (маршрутизатора) источника и компьютера (маршрутизатора) получателя и следовательно могут наряду с MAC адресами использоваться для коммутации. Тем не менее, название прижилось, к тому же практика показывает, что способность системы анализировать информацию прикладного уровня может оказаться полезной — в частности для управления трафиком. Таким образом, термин "зависимый от приложения" более точно отражает функции так называемых коммутаторов четвертого уровня.


Тематики
EN
Русско-английский словарь нормативно-технической терминологии > технология коммутации
97 программируемый логический контроллер
- speicherprogrammierbare Steuerung, f
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего. Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы. Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7. Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series. Рис. 4. Резервированный контроллер FCP270.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA). Рис. 5. Контроллер AC800M.
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-немецкий словарь нормативно-технической терминологии > программируемый логический контроллер
98 полевая шина
полевая шина
-
[Интент]
полевая магистраль по зарубежной терминологии
Имеет много терминов-синонимов и обозначает специализированные последовательные магистрали малых локальных сетей (МЛС), ориентированны на сопряжение с ЭВМ рассредоточенных цифровых датчиков и исполнительных органов. Магистрали рассчитаны на применение в машиностроении, химической промышленности, в системах автоматизации зданий, крупных установках, бытовых электронных системах, системах автомобильного оборудования, малых контрольно-измерительных и управляющих системах на основе встраиваемых микроЭВМ и т. п. Основными магистралями являются Bitbus, MIL STD-1553В. В настоящее время рабочими группами IEC (65С и SP-50) стандартизируются два основных типа МЛС: высокоскоростные и низкоскоростные, ориентированные на датчики.
[Е.С.Алексеев, А.А.Мячев. Англо-русский толковый словарь по системотехнике ЭВМ. Москва 1993]ЧТО ТАКОЕ FIELDВUS?
Так пишется оригинальный термин, который в русском переводе звучит как «промышленная сеть». Fieldbus — это не какой-то определенный протокол передачи данных и не тип сетевой архитектуры, этот термин не принадлежит ни одной отдельно взятой компании и обозначает скорее сферу применения, чем какую-либо конкретную сетевую технологию.
Давайте попробуем сформулировать лишь некоторые основные требования, которые можно предъявить к «идеальной» промышленной сети.
1. Производительность.
2. Предсказуемость времени доставки информации.
3. Помехоустойчивость.
4. Доступность и простота организации физического канала передачи данных.
5. Максимальный сервис для приложений верхнего уровня.
6. Минимальная стоимость устройств аппаратной реализации, особенно на уровне контроллеров.
7. Возможность получения «распределенного интеллекта», путем предоставления максимального доступа к каналу нескольким ведущим узлам.
8.Управляемость и самовосстановление в случае возникновения нештатных ситуаций.
[Сергей Гусев. Краткий экскурс в историю промышленных сетей]
Международный стандарт IEC 61158 “Fieldbus for use in Industrial Control Systems” («Промышленная управляющая сеть для применения в промышленных системах управления») определяет восемь независимых и несовместимых коммуникационных технологий, из которых FOUNDATION Fieldbus H1 и PROFIBUS PA стали в значительной степени преобладающими в различных отраслях промышленности.
Эти промышленные сети соответствуют требованиям стандарта IEC 61158 2, который устанавливает физический уровень так называемых промышленных сетей H1.
Основными требованиями к промышленным сетям H1 являются:
● передача данных и питание устройств нижнего уровня по одной витой паре;
● гибкость при проектировании различных топологий сети;
● совместимость всех полевых приборов;
● взрывобезопасность при установкево взрывоопасных зонах;
● распределение одной инфраструктуры на многочисленные сегменты.[Виктор Жданкин. Концепция FieldConnex® для промышленных сетей FOUNDATION Fieldbus H1 и PROFIBUS_PA: повышение производительности и снижение затрат. СТА 2/2009]
Термин полевая шина является дословным переводом английского термина fieldbus.
Термин промышленная сеть является более точным переводом и в настоящее время именно он используется в профессиональной технической литературе.Промышленная сеть — сеть передачи данных, связывающая различные датчики, исполнительные механизмы, промышленные контроллеры и используемая в промышленной автоматизации. Термин употребляется преимущественно в автоматизированной системе управления технологическими процессами (АСУТП).
Устройства используют сеть для:
- передачи данных, между датчиками, контроллерами и исполнительными механизмами;
- диагностики и удалённого конфигурирования датчиков и исполнительных механизмов;
- калибрования датчиков;
- питания датчиков и исполнительных механизмов;
- связи между датчиками, исполнительными механизмами, ПЛК и АСУ ТП верхнего уровня.
В промышленных сетях для передачи данных применяют:
- электрические линии;
- волоконно-оптические линии;
- беспроводную связь (радиомодемы и Wi-Fi).
Промышленные сети могут взаимодействовать с обычными компьютерными сетями, в частности использовать глобальную сеть Internet.
[ Википедия]
Главной функцией полевой шины является обеспечение сетевого взаимодействия между контроллерами и удаленной периферией (например, узлами ввода/вывода). Помимо этого, к полевой шине могут подключаться различные контрольно-измерительные приборы ( Field Devices), снабженные соответствующими сетевыми интерфейсами. Такие устройства часто называют интеллектуальными ( Intelligent Field Devices), так как они поддерживают высокоуровневые протоколы сетевого обмена.
Пример полевой шины представлен на рисунке 1.
Рис. 1. Полевая шина.Как уже было отмечено, существует множество стандартов полевых шин, наиболее распространенные из которых приведены ниже:
1. Profibus DP
2. Profibus PA
3. Foundation Fieldbus
4. Modbus RTU
5. HART
6. DeviceNet
Несмотря на нюансы реализации каждого из стандартов (скорость передачи данных, формат кадра, физическая среда), у них есть одна общая черта – используемый алгоритм сетевого обмена данными, основанный на классическом принципе Master-Slave или его небольших модификациях.
Современные полевые шины удовлетворяют строгим техническим требованиям, благодаря чему становится возможной их эксплуатация в тяжелых промышленных условиях. К этим требованиям относятся:- Детерминированность. Под этим подразумевается, что передача сообщения из одного узла сети в другой занимает строго фиксированный отрезок времени. Офисные сети, построенные по технологии Ethernet, - это отличный пример недетерминированной сети. Сам алгоритм доступа к разделяемой среде по методу CSMA/CD не определяет время, за которое кадр из одного узла сети будет передан другому, и, строго говоря, нет никаких гарантий, что кадр вообще дойдет до адресата. Для промышленных сетей это недопустимо. Время передачи сообщения должно быть ограничено и в общем случае, с учетом количества узлов, скорости передачи данных и длины сообщений, может быть заранее рассчитано.
- Поддержка больших расстояний. Это существенное требование, ведь расстояние между объектами управления может порой достигать нескольких километров. Применяемый протокол должен быть ориентирован на использование в сетях большой протяженности.
- Защита от электромагнитных наводок. Длинные линии в особенности подвержены пагубному влиянию электромагнитных помех, излучаемых различными электрическими агрегатами. Сильные помехи в линии могут исказить передаваемые данные до неузнаваемости. Для защиты от таких помех применяют специальные экранированные кабели, а также оптоволокно, которое, в силу световой природы информационного сигнала, вообще нечувствительно к электромагнитным наводкам. Кроме этого, в промышленных сетях должны использоваться специальные методы цифрового кодирования данных, препятствующие их искажению в процессе передачи или, по крайней мере, позволяющие эффективно детектировать искаженные данные принимающим узлом.
- Упрочненная механическая конструкция кабелей и соединителей. Здесь тоже нет ничего удивительного, если представить, в каких условиях зачастую приходиться прокладывать коммуникационные линии. Кабели и соединители должны быть прочными, долговечными и приспособленными для использования в самых тяжелых окружающих условиях (в том числе агрессивных атмосферах).
По типу физической среды полевые шины делятся на два типа:
-
Полевые шины, построенные на базе оптоволоконного кабеля.
Преимущества использования оптоволокна очевидны: возможность построения протяженных коммуникационных линий (протяженностью до 10 км и более); большая полоса пропускания; иммунитет к электромагнитным помехам; возможность прокладки во взрывоопасных зонах.
Недостатки: относительно высокая стоимость кабеля; сложность физического подключения и соединения кабелей. Эти работы должны выполняться квалифицированными специалистами. -
Полевые шины, построенные на базе медного кабеля.
Как правило, это двухпроводной кабель типа “витая пара” со специальной изоляцией и экранированием. Преимущества: удобоваримая цена; легкость прокладки и выполнения физических соединений. Недостатки: подвержен влиянию электромагнитных наводок; ограниченная протяженность кабельных линий; меньшая по сравнению с оптоволокном полоса пропускания.
Итак, перейдем к рассмотрению методов обеспечения отказоустойчивости коммуникационных сетей, применяемых на полевом уровне. При проектировании и реализации этот аспект становится ключевым, так как в большой степени определяет характеристики надежности всей системы управления в целом.
На рисунке 2 изображена базовая архитектура полевой шины – одиночная (нерезервированная). Шина связывает контроллер С1 и четыре узла ввода/вывода IO1-IO4. Очевидно, что такая архитектура наименее отказоустойчива, так как обрыв шины, в зависимости от его локализации, ведет к потере коммуникации с одним, несколькими или всеми узлами шины. В нашем случае в результате обрыва теряется связь с двумя узлами.
Рис. 2. Нерезервированная шина.Здесь важное значение имеет термин “единичная точка отказа” (SPOF, single point of failure). Под этим понимается место в системе, отказ компонента или обрыв связи в котором приводит к нарушению работы всей системы. На рисунке 2 единичная точка отказа обозначена красным крестиком.
На рисунке 3 показана конфигурация в виде дублированной полевой шины, связывающей резервированный контроллер с узлами ввода/вывода. Каждый узел ввода/вывода снабжен двумя интерфейсными модулями. Если не считать сами модули ввода/вывода, которые резервируются редко, в данной конфигурации единичной точки отказа нет.
Рис. 3. Резервированная шина.Вообще, при построении отказоустойчивых АСУ ТП стараются, чтобы единичный отказ в любом компоненте (линии связи) не влиял на работу всей системы. В этом плане конфигурация в виде дублированной полевой шины является наиболее распространенным техническим решением.
На рисунке 4 показана конфигурация в виде оптоволоконного кольца. Контроллер и узлы ввода/вывода подключены к кольцу с помощью резервированных медных сегментов. Для состыковки медных сегментов сети с оптоволоконными применяются специальные конверторы среды передачи данных “медь<->оптоволокно” (OLM, Optical Link Module). Для каждого из стандартных протоколов можно выбрать соответствующий OLM.
Рис. 4. Одинарное оптоволоконное кольцо.Как и дублированная шина, оптоволоконное кольцо устойчиво к возникновению одного обрыва в любом его месте. Система такой обрыв вообще не заметит, и переключение на резервные интерфейсные и коммуникационные модули не произойдет. Более того, обрыв одного из двух медных сегментов, соединяющих узел с оптоволоконным кольцом, не приведет к потере связи с этим узлом. Однако второй обрыв кольца может привести к неработоспособности системы. В общем случае два обрыва кольца в диаметрально противоположных точках ведут к потере коммуникации с половиной подключенных узлов.
На рисунке 5 изображена конфигурация с двойным оптическим кольцом. В случае если в результате образования двух точек обрыва первичное кольцо выходит из строя, система переключается на вторичное кольцо. Очевидно, что такая архитектура сети является наиболее отказоустойчивой. На рисунке 5 пошагово изображен процесс деградации сети. Обратите внимание, сколько отказов система может перенести до того, как выйдет из строя.
Рис. 5. Резервированное оптоволоконное кольцо.[ http://kazanets.narod.ru/NT_PART1.htm]
Тематики
Синонимы
EN
Русско-английский словарь нормативно-технической терминологии > полевая шина
99 программируемый логический контроллер
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-английский словарь нормативно-технической терминологии > программируемый логический контроллер
100 программируемый логический контроллер
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-французский словарь нормативно-технической терминологии > программируемый логический контроллер
СтраницыСм. также в других словарях:
отказ оборудования — — [А.С.Гольдберг. Англо русский энергетический словарь. 2006 г.] Тематики энергетика в целом EN breakagebrequipment failure … Справочник технического переводчика
отказ оборудования или системы в период приработки или освоения — — [А.С.Гольдберг. Англо русский энергетический словарь. 2006 г.] Тематики энергетика в целом EN infant failure … Справочник технического переводчика
отказ оборудования на электростанции — авария на электростанции — [А.С.Гольдберг. Англо русский энергетический словарь. 2006 г.] Тематики энергетика в целом Синонимы авария на электростанции EN plant failure … Справочник технического переводчика
отказ оборудования на энергоблоке — авария на энергоблоке — [А.С.Гольдберг. Англо русский энергетический словарь. 2006 г.] Тематики энергетика в целом Синонимы авария на энергоблоке EN plant failure … Справочник технического переводчика
отказ оборудования по контролю загрязнения воздуха — По определению Агентства по защите окружающей среды США, неожиданный, редкий и непредотвращаемый обычными методами. [А.С.Гольдберг. Англо русский энергетический словарь. 2006 г.] Тематики энергетика в целом EN air control equipment malfunction … Справочник технического переводчика
кратковременный отказ (оборудования) — — [А.С.Гольдберг. Англо русский энергетический словарь. 2006 г.] Тематики энергетика в целом EN short duration failureSDF … Справочник технического переводчика
оповещённый отказ оборудования или системы — — [А.С.Гольдберг. Англо русский энергетический словарь. 2006 г.] Тематики энергетика в целом EN alarmed failure … Справочник технического переводчика
отказ по общей причине — Отказ оборудования, вытекающий из единичного события, в тех случаях, когда этот отказ не является следствием другого отказа. Примечание Отказ по общей причине не следует смешивать с взаимосвязанным отказом. [ГОСТ ЕН 1070 2003] Тематики… … Справочник технического переводчика
отказ по общей причине — Отказ оборудования, вытекающий из единичного события в тех случаях, когда отказ не является следствием другого отказа. МЭК 61508 4:1998 … Комплексное обеспечение безопасности и антитеррористической защищенности зданий и сооружений
отказ — 3.14 отказ: Событие, заключающееся в нарушении работоспособного состояния машины, которое наступает, когда машина утрачивает одну или несколько своих основных функций. Примечание Отказ машины обычно происходит в том случае, когда один или… … Словарь-справочник терминов нормативно-технической документации
отказ по общей причине — 3.10 отказ по общей причине (common failure): Отказ оборудования, вызванный единичным событием в случаях, когда отказ не является следствием другого отказа. Источник: ГОСТ Р 531 … Словарь-справочник терминов нормативно-технической документации
 18+© Академик, 2000-2024
18+© Академик, 2000-2024- Обратная связь: Техподдержка, Реклама на сайте
Экспорт словарей на сайты, сделанные на PHP, Joomla, Drupal, WordPress, MODx.
Перевод: с русского на все языки
со всех языков на русский- Со всех языков на:
- Русский
- С русского на:
- Все языки
- Английский
- Греческий
- Итальянский
- Немецкий
- Туркменский
- Французский
- Чешский