-
101 stiffness
ЖесткостьМера податливости тела деформации при заданном типе нагрузки: чем больше жесткость, тем меньше деформация. В случаях малых одномерных деформаций (в пределах зоны упругости, где справедлив закон Гука) жёсткость можно определить как произведение модуля упругости Е (при растяжении, сжатии и изгибе) или G (при сдвиге и кручении) на соответствующую геометрическую характеристику сечения элемента, например, площадь поперечного сечения или осевой момент инерции. Понятие жёсткости широко используется при решении задач сопротивления материалов. -
102 при полной нагрузке
-
103 работа с полной нагрузкой
Авиация и космонавтика. Русско-английский словарь > работа с полной нагрузкой
-
104 число оборотов при полной нагрузке
Авиация и космонавтика. Русско-английский словарь > число оборотов при полной нагрузке
-
105 аэродинамический
аэродинамическая балансировкаaerodynamic balanceаэродинамическая грузоподъемностьlifting capacityаэродинамическая жесткостьaerodynamic stiffnessаэродинамическая крутка1. aerodynamic twist2. aerodynamic warping аэродинамическая нагрузкаaerodynamic loadаэродинамическая несущая поверхностьaerodynamic lifting surfaceаэродинамическая неустойчивостьaerodynamic instabilityаэродинамическая передняя кромкаaerodynamic leading edgeаэродинамическая поверхностьaerodynamic surfaceаэродинамическая подъемная силаaerodynamic liftаэродинамическая реакцияaerodynamic reactionаэродинамическая силаaerodynamic forceаэродинамическая система управления креномaerodynamic roll systemаэродинамическая схемаaerodynamic designаэродинамическая труба1. wind channel2. wind tunnel аэродинамическая труба больших скоростейhigh-speed wind tunnelаэродинамическая труба вертикального типаvertical wind tunnelаэродинамическая труба для испытаний на сваливание в штопорspin wind tunnelаэродинамическая труба для испытания моделей в натуральную величинуfull-scale wind tunnelаэродинамическая труба замкнутого типаclosed-circuit tunnelаэродинамическая труба имитации свободного полетаfree-flight wind tunnelаэродинамическая труба околозвуковых скоростейtransonic wind tunnelаэродинамическая труба открытого типаopen-circuit wind tunnelаэродинамическая труба с закрытой рабочей частьюclosed-throat wind tunnelаэродинамическая устойчивостьaerodynamic stabilityаэродинамическая характеристика1. aerodynamic characteristic2. aerodynamic performance 3. aerodynamic property аэродинамическая хордаaerodynamic chordаэродинамические характеристикиaerodynamic behaviorаэродинамический гребень на крылеwing fenceаэродинамический коэффициентaerodynamic coefficientаэродинамический моментaerodynamic momentаэродинамический нагревaerodynamic heatingаэродинамический профиль1. aerofoil2. airfoil аэродинамический следaerodynamic trailаэродинамический тормоз1. speed brake2. aerodynamic brake 3. airbrake аэродинамический фокусaerodynamic centerаэродинамический шумaerodynamic noiseаэродинамический экранaerodynamic shieldаэродинамическое возмущениеaerodynamic distributionаэродинамическое давлениеaerodynamic pressureаэродинамическое демпфированиеaerodynamic dampingаэродинамическое запаздываниеaerodynamic lagаэродинамическое затенение1. blanketing effect2. aerodynamic shading аэродинамическое исследованиеaerodynamic study(конструкции) аэродинамическое качество1. aerodynamic quality2. fineness ratio 3. aerodynamic efficiency 4. aerodynamic fineness аэродинамическое совершенствоaerodynamic cleannessаэродинамическое сопротивлениеaerodynamic dragаэродинамическое торможениеaerodynamic brakingаэродинамическое чистое крылоclean wingвесы аэродинамической трубыwind-tunnel balanceвлияние стенок аэродинамической трубыtunnel wall interferenceдавление в аэродинамической трубеwind-tunnel pressureдатчик положения аэродинамических тормозовair-brake pickoffимитатор аэродинамических нагрузокair-load simulatorиспытание в аэродинамической трубеwind-tunnel testкривизна аэродинамического профиляaerofoil camberлобовое сопротивление аэродинамической поверхностиaerofoil dragмодель для проведения аэродинамических испытанийaerodynamic test vehicleмощность на преодоление аэродинамического сопротивленияinduced drag powerоборудование безэховой аэродинамической трубыunechoic wind tunnel facilitiesпродувать в аэродинамической трубеtest in the wind tunnelпрофиль аэродинамической поверхностиaerofoil profileраспределение аэродинамической нагрузкиair-load distributionсистема аэродинамических тормозовspeed brake systemсредняя аэродинамическая хордаmean aerodynamic chordсредняя линия аэродинамического профиляairfoil center lineтемпература аэродинамического нагреваaerodynamic heat temperatureуправление креном с помощью аэродинамической поверхностиaerodynamic roll controlуправление с помощью аэродинамической поверхностиaerodynamic controlучасток аэродинамической поверхностиaerofoil sectionцентр аэродинамического давленияcenter of air pressureэлерон с аэродинамической компенсациейaerodynamically-balanced -
106 модуль упругости мгновенный
мгновенный модуль упругости
Отношение напряжения к относительной деформации при очень быстром (мгновенном) деформировании.
[Сборник рекомендуемых терминов. Выпуск 82. Строительная механика. Академия наук СССР. Комитет научно-технической терминологии. 1970 г.]
модуль упругости мгновенный
Модуль упругости, определённый в момент приложения нагрузки
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]Тематики
- строительная механика, сопротивление материалов
EN
DE
FR
Русско-немецкий словарь нормативно-технической терминологии > модуль упругости мгновенный
-
107 программируемый логический контроллер
- speicherprogrammierbare Steuerung, f
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего. Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы. Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7. Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series. Рис. 4. Резервированный контроллер FCP270.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA). Рис. 5. Контроллер AC800M.
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-немецкий словарь нормативно-технической терминологии > программируемый логический контроллер
108 вид компенсации реактивной мощности
вид компенсации реактивной мощности
-См. также компенсация реактивной мощности
Параллельные тексты EN-RU
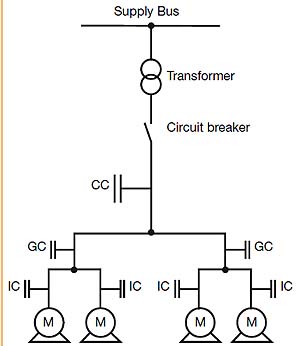
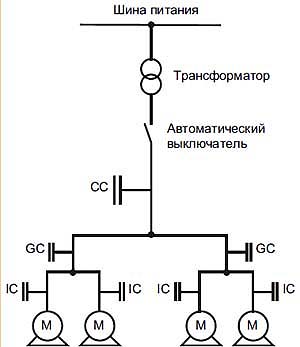
CC: Central Compensation
GC: Group Compensation
IC: Individual Compensation
M: Motor LoadCC: Централизованная компенсация
GC: Групповая компенсация
IC: Индивидуальная компенсация
M: Нагрузка (электродвигатель)The location of low-voltage capacitors in an installation constitutes the mode of compensation, which may be central (one location for the entire installation), by sector (section-by-section), at load level, or some combination of the latter two.
In principle, the ideal compensation is applied at a point of consumption and at the level required at any moment in time.
In practice, technical and economic factors govern the choice.
The location for connection of capacitor banks in the electrical network is determined by:
• the overall objective (avoid penalties on reactive energy relieve transformer or cables, avoid voltage drops and sags)
• the operating mode (stable or fluctuating loads)
• the foreseeable influence of capacitors on the network characteristics
• the installation cost.
[Schneider Electric]Вид компенсации определяется расположением конденсаторов низкого напряжения в электроустановке. Различают следующие виды компенсации: централизованная (одна конденсаторная батарея на всю электроустановку), групповая (по батарее на группу нагрузок), инидивидуальная или комбинированная - сочетание двух последних видов компенсации.
Теоретически, идеальной является компенсация, выполняемая в любой момент времени в требуемой точке электроустановки в требуемом количестве.
На практике выбор определяется техническими и экономическими соображениями.
Место подключения конденсаторных батарей к электрической сети определяется:
● общей задачей (избежать штрафов за потребление реактивной энергии, разгрузить силовой трансформатор и кабели, предотвратить падение и провалы напряжения);
● режимом работы (постоянные и переменные нагрузки);
● предполагаемым влиянием конденсаторов на характеристики электросети;
● стоимостью установки.
[Перевод Интент]Тематики
EN
Русско-английский словарь нормативно-технической терминологии > вид компенсации реактивной мощности
109 истинная деформация (металлургия)
истинная деформация
1. Отношение изменения в размерах нагруженного образца к его размерам до приложения нагрузки.
2. В теле, подвергнутом воздействию продольной силы, натуральный логарифм отношения длины калибра в момент наблюдения к первоначальной длине калибра.
[ http://www.manual-steel.ru/eng-a.html]Тематики
EN
Русско-английский словарь нормативно-технической терминологии > истинная деформация (металлургия)
110 модуль упругости мгновенный
мгновенный модуль упругости
Отношение напряжения к относительной деформации при очень быстром (мгновенном) деформировании.
[Сборник рекомендуемых терминов. Выпуск 82. Строительная механика. Академия наук СССР. Комитет научно-технической терминологии. 1970 г.]
модуль упругости мгновенный
Модуль упругости, определённый в момент приложения нагрузки
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]Тематики
- строительная механика, сопротивление материалов
EN
DE
FR
Русско-английский словарь нормативно-технической терминологии > модуль упругости мгновенный
111 параллельная работа электроагрегата с сетью
параллельная работа с сетью
Параллельной работой электроагрегатов с сетью называют работу, при которой один или несколько параллельно работающих электроагрегатов (5.3.2.1) электрически соединены с сетью.
Примечание 2 — Для параллельной работы с сетью требуется разрешение соответствующего ведомства. Защитное оборудование в этом случае должно быть исправно.
Примечание 3 — Положение примечания 2 относится к случаям, когда в сеть с целью проверки пуска подается электроэнергия от электроагрегатов на время, указанное изготовителем.
[ ГОСТ Р ИСО 8528-1-2005]10.1.3 Ударное включение электроагрегата с одновременной кратковременной параллельной работой с сетью
Напряжение и частоту электроагрегата постепенно устанавливают равной напряжению и частоте сети.
При достижении синхронизации напряжения и частоты электроагрегата с напряжением и частотой сети включается выключатель генератора и с задержкой не более 100 мс выключается выключатель сети.
Для предотвращения перегрузки и последующего выхода из строя электроагрегата мощность нагрузки в момент приема не должна превышать значений, приведенных в разделе 8 ИСО 8528-5.
Частота и напряжение электроагрегата могут отличаться от частоты и напряжения сети.
После завершения испытания происходит автоматическое переключение питания на сеть в обратной последовательности без перерыва электроснабжения.
Необходимым условием переключения на сеть является ее готовность выдержать полную нагрузку.
Для этого должна быть установлена соответствующая аппаратура защиты, управления и коммутации, указанная в 5.10 ИСО 8528-4.
Одновременная кратковременная работа электроагрегата и сети необходима для проверки работоспособности защиты и выявления повреждения в цепях.
[ ГОСТ Р ИСО 8528-12-2005]Тематики
Синонимы
EN
Русско-английский словарь нормативно-технической терминологии > параллельная работа электроагрегата с сетью
112 переходный режим работы котла
переходный режим работы котла
Работа в момент изменения нагрузки.
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
Русско-английский словарь нормативно-технической терминологии > переходный режим работы котла
113 программируемый логический контроллер
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-английский словарь нормативно-технической терминологии > программируемый логический контроллер
114 пуск вращающегося электродвигателя переменного тока при пониженном напряжении
пуск вращающегося электродвигателя переменного тока при пониженном напряжении
Пуск вращающегося электродвигателя переменного тока путем переключения со звезды на треугольник или с последовательного на параллельное подключение фаз обмотки, или применения автотрансформатора, реактора, пускового реостата.
[ ГОСТ 27471-87]Параллельные тексты EN-RU The reduced voltage starting systems consist in connecting directly the motor to the electrical supply network, thus carrying out a reduced voltage starting. This involves a reduction of the starting current, but unfortunately also a reduction in the inrush torque.
The most common types of starting are starting with reactors and stator resistors, star-delta starting, starting with auto-transformer or starting with soft starter, which intervenes on the motor torque curve to adapt it to the load characteristics.
[ABB]Пуск при пониженном напряжении
Принцип пуска при пониженном напряжении заключается в подключении двигателя непосредственно к электрической питающей сети таким образом, что в момент пуска на двигатель подается пониженное напряжение. Однако при этом происходит не только снижению пускового тока, но, к сожалению, и уменьшение пускового момента.
Наиболее распространенными методами пуска при пониженном напряжении являются: с подключением реакторов или резисторов, переключением со звезды на треугольник, через автотрансформатор или с помощью устройства плавного пуска, которое подстраивает кривую вращающего момента электродвигателя под характеристику нагрузки.
[Перевод Интент]Тематики
Синонимы
EN
Русско-английский словарь нормативно-технической терминологии > пуск вращающегося электродвигателя переменного тока при пониженном напряжении
115 со стороны источника питания
со стороны источника питания
-
[Интент]Параллельные тексты EN-RU
Installation standards require upstream protection.
[LS Industrial Systems]Стандарты требуют, чтобы электроустановки имели защиту со стороны источника питания.
[Перевод Интент]The MCCBs downstream cannot handle this maximum fault current and rely on the opening of the upstream breaker for protection.
[LS Industrial Systems]Автоматические выключатели < в литом корпусе>, расположенные со стороны нагрузки, не рассчитаны на такой максимальный ток короткого замыкания и защитное отключение цепи производится автоматическим выключателем, расположенным со стороны источника питания.
[Перевод Интент]It must be equal to the cross-section of the installation’s upstream cables.
[LS Industrial Systems]Сечение жил должно быть равно сечению жил кабелей электроустановки, расположенных со стороны источника питания.
[Перевод Интент]The optimum arrangement of this system can be organized with upstream breaker's electronic trip unit which can perform short time delay setting.
[LS Industrial Systems]Лучше всего данному требованию удовлетворяет система, в которой расположенный со стороны источника питания автоматический выключатель оснащен электронным расцепителем с кратковременной задержкой срабатывания.
[Перевод Интент]At the instant of closing a switch to energize a capacitor, the current is limited only by the impedance of the network upstream of the capacitor, so that high peak values of current will occur for a brief period, rapidly falling to normal operating values.
[LS Industrial Systems]В момент включения конденсатора ток ограничивается только полным сопротивлением участка цепи, расположенного со стороны источника питания. Ток принимает максимальное значение только в течение очень короткого времени, а затем быстро уменьшается до обычного рабочего значения.
[Перевод Интент]This is an economical approach to the use of circuit breakers, whereby only the main ( upstream) breaker has adequate interrupting capacity for the maximum available fault current.
[LS Industrial Systems]Данное решение обеспечивает наиболее экономичный способ применения автоматических выключателей, поскольку только главный автоматический выключатель ( расположенный со стороны источника питания) должен иметь отключающую способность, соответствующую максимально возможному току короткого замыкания.
[Перевод Интент]Тематики
- выключатель автоматический
- электротехника, основные понятия
EN
Русско-английский словарь нормативно-технической терминологии > со стороны источника питания
116 транкинг передач
транкинг передач
Метод динамического выделения каналов при организации транкинговой связи. Канал выделяется абоненту только на ограниченное время и освобождается сразу же по завершении работы передатчика. Следующий после паузы сеанс связи может быть организован через любой, свободный в данный момент канал. Такой режим позволяет повысить пропускную способность транкинговых систем, однако в случае превышения максимального значения нагрузки системы, особенно в часы пик, возможны задержки при передаче информации и, как следствие, снижение комфортности разговоров. Ср. message ~, quasi-transmission ~.
[Л.М. Невдяев. Телекоммуникационные технологии. Англо-русский толковый словарь-справочник. Под редакцией Ю.М. Горностаева. Москва, 2002]Тематики
- электросвязь, основные понятия
EN
Русско-английский словарь нормативно-технической терминологии > транкинг передач
117 нерациональный метод ограничения выбросов вредных веществ
2.1.32 нерациональный метод ограничения выбросов вредных веществ: Любой метод или способ, который при эксплуатации ТС в нормальных условиях уменьшает эффективность системы ограничения выбросов вредных веществ до уровня ниже предполагаемого при использовании предписанных методов определения концентрации выбросов вредных веществ.
2.2 В настоящем стандарте применены следующие обозначения и сокращения:
2.2.1 Обозначения и единицы измерения показателей, определяемых в испытаниях
Обозначение
Наименование показателя
показателя
единицы измерения показателя
АР
м2
Площадь поперечного сечения изокинетического пробоотборника
АТ
м2
Площадь поперечного сечения выпускной трубы
СЕЕ
-
Эффективность по этану
СЕМ
-
Эффективность по метану
С1
-
Углеводороды, эквивалентные углероду С1
сопс
млн-1 или объемная доля, %
Концентрация. Указанное обозначение используется в качестве нижнего индекса
D0
м3/с
Отрезок, отсекаемый на координатной оси калибровочной функции PDP
DF
-
Коэффициент разбавления
D
-
Константа функции Бесселя
Е
-
Константа функции Бесселя
EZ
г/(кВт×ч)
Интерполированный выброс NOx в контрольной точке
fa
-
Лабораторный атмосферный коэффициент
fc
с-1
Частота, отсекаемая фильтром Бесселя
FFH
-
Удельный коэффициент топлива для расчета влажного состояния по сухому состоянию
Fs
-
Стехиометрический коэффициент
GAIRV
кг/ч
Массовый расход воздуха на впуске во влажном состоянии
GAIRD
кг/ч
Массовый расход воздуха на впуске в сухом состоянии
GDILW
кг/ч
Массовый расход разбавленного воздуха во влажном состоянии
GEDFW
кг/ч
Эквивалентный массовый расход разбавленных отработавших газов во влажном состоянии
GEXHW
кг/ч
Массовый расход отработавших газов во влажном состоянии
GFUEL
кг/ч
Массовый расход топлива
GTOTW
кг/ч
Массовый расход разбавленных отработавших газов во влажном состоянии
H
мДж/м3
Теплотворная способность
HREF
г/кг
Исходная абсолютная влажность (10,71 г/кг)
Ha
г/кг
Абсолютная влажность воздуха на впуске
Hd
г/кг
Абсолютная влажность разбавляющего воздуха
HTCART
моль/моль
Водородно-углеродное число
i
-
Нижний индекс, обозначающий i-й режим
К
-
Константа Бесселя
k
м-1
Коэффициент светопоглощения
KH, D
-
Поправочный коэффициент на влажность для NОx дизельного двигателя
KH, G
-
Поправочный коэффициент на влажность для NOx газового двигателя
Kv
Калибровочная функция трубки Вентури CFV
KW, a
-
Поправочный коэффициент при переходе из сухого состояния во влажное для воздуха на впуске
KW, d
-
Поправочный коэффициент при переходе из сухого состояния во влажное для разбавляющего воздуха
KW, e
-
Поправочный коэффициент при переходе из сухого состояния во влажное для разбавленных отработавших газов
KW, r
-
Поправочный коэффициент при переходе из сухого состояния во влажное для неразбавленных отработавших газов
L
%
Крутящий момент в процентах максимального крутящего момента испытуемого двигателя
La
м
Эффективная база дымомера
т
Коэффициент наклона калибровочной функции насоса PDP
mass
г/ч или г
Массовый расход (интенсивность потока). Указанное обозначение используется в качестве нижнего индекса
MDIL
кг
Масса пробы разбавляющего воздуха, прошедшей через фильтры для отбора проб вредных частиц
Md
мг
Уловленная масса проб вредных частиц в разбавляющем воздухе
Мf
мг
Уловленная масса проб вредных частиц
Мf, p
мг
Масса проб вредных частиц, уловленная на основном фильтре
Мf, b
мг
Масса проб вредных частиц, уловленная на вспомогательном фильтре
MSAM
кг
Масса пробы разбавленных отработавших газов, прошедших через фильтры для отбора вредных частиц
MSEK
кг
Масса вторичного разбавляющего воздуха
MTOTW
кг
Общая масса пробы CVS за цикл во влажном состоянии
MTOTW, i
кг
Мгновенная масса пробы CVS во влажном состоянии
N
%
Дымность
NP
-
Общее число оборотов насоса PDP за цикл
NP, i
-
Число оборотов насоса PDP в течение определенного промежутка времени
n
мин-1
Частота вращения двигателя
np
с-1
Частота вращения насоса PDP
nhi
мин-1
Высокая частота вращения двигателя
nlo
мин-1
Низкая частота вращения двигателя
nref
мин-1
Исходная частота вращения двигателя для испытания ETC
pa
кПа
Давление насыщения пара на впуске воздуха в двигатель
pA
кПа
Абсолютное давление
pB
кПа
Полное давление
pd
кПа
Давление насыщения пара разбавляющего воздуха
ps
кПа
Сухое атмосферное давление
p1
кПа
Снижение давления на входе в насос
кВт
Мощность, поглощаемая вспомогательными устройствами, устанавливаемыми при проведении испытаний
кВт
Мощность, поглощаемая вспомогательными устройствами, демонтируемыми при проведении испытания
кВт
Некорректированная полезная мощность
кВт
Мощность, измеренная на испытательном стенде
W
-
Константа Бесселя
QS
м3/с
Объемный расход воздуха в трубке Вентури CFV
q
-
Коэффициент разбавления
r
-
Отношение площадей поперечного сечения изокинетического пробоотборника и выпускной трубы
Ra
%
Относительная влажность воздуха на впуске
Rd
%
Относительная влажность разбавляющего воздуха
Si
m-1
Мгновенное значение дымности
Sl
-
Коэффициент l-смещения
T
К
Абсолютная температура
Rf
-
Коэффициент чувствительности FID
r
кг/м3
Плотность
S
кВт
Мощность, на которую отрегулирован динамометр
Та
К
Абсолютная температура воздуха на впуске
t
с
Время измерения
te
с
Время срабатывания электрического сигнала
tf
с
Время реакции фильтра для функции Бесселя
tp
с
Физическое время реакции
Dt
с
Временной интервал между последовательными моментами считывания данных о дымности (= 1/частота отбора проб)
Dt1
с
Временной интервал между значениями мгновенных расходов в трубке Вентури CFV
t
%
Прозрачность дыма
V0
м3/об
Калибровочная функция объемного расхода насоса PDP в эксплуатационных условиях (на 1 оборот вала насоса)
W
-
Число Воббе
Wact
КВт×ч
Фактическая работа за цикл испытания ETC
Wref
КВт×ч
Исходная работа за цикл испытания ETC
WF
-
Коэффициент весомости
WFE
-
Эффективный коэффициент весомости
X0
м3/oб
Калибровочная функция объемного расхода воздуха насоса PDP (на 1 оборот вала насоса)
Yi
м-1
Среднее значение коэффициента светопоглощения за 1 с по Бесселю
2.2.2 Обозначения химических компонентов
СН4 - метан;
С2Н6 - этан;
С2Н5ОН - этанол;
С3Н8 - пропан;
СО - оксид углерода;
DOP - диоктилфталат;
СО2 - диоксид углерода;
НС - углеводороды;
NMHC - (non-methane hydrocarbons) углеводороды, не содержащие метан;
NОx - оксиды азота;
NO - оксид азота;
NО2 - диоксид азота;
РТ - (particulates) вредные частицы.
ТНС - (total hydrocarbons) общее количество углеводородов.
2.2.3 Сокращения
CFV - (critical flow venturi) трубка Вентури с критическим расходом;
CLD - (chemiluminescent detector) хемилюминесцентный детектор;
CVS - (constant volume sampling) отбор проб при постоянном объеме;
ELR - (European load response test) европейский цикл испытаний реакции двигателя на изменение нагрузки;
ESC - (European steady state cycle) европейский цикл испытаний в установившихся режимах;
ETC - (European transient cycle) европейский цикл испытаний в переходных режимах;
FID - (flame ionization detector) плазменно-ионизационный детектор;
GC - (gas chromatograph) газовый хроматограф;
HCLD - (heated chemiluminescent detector) нагреваемый хемилюминесцентный детектор;
HFID - (heated flame ionization detector) нагреваемый плазменно-ионизационный детектор;
LPG - (liquefied petroleum gas) сжиженный нефтяной газ;
NDIR - (non-dispersive infrared) недисперсионный инфракрасный анализатор;
NG - (natural gas) природный газ;
NMC - (non-methane cutter) отделитель фракций, не содержащих метан;
PDP - (positive displacement pomp) насос с объемным регулированием;
PSS - (particulate sampling system) система отбора проб вредных частиц.
Источник: ГОСТ Р 41.49-2003: Единообразные предписания, касающиеся сертификации двигателей с воспламенением от сжатия и двигателей, работающих на природном газе, а также двигателей с принудительным зажиганием, работающих на сжиженном нефтяном газе, и транспортных средств, оснащенных двигателями с воспламенением от сжатия, двигателями, работающими на природном газе, и двигателями с принудительным зажиганием, работающими на сжиженном нефтяном газе. В отношении выбросов вредных веществ оригинал документа
Русско-английский словарь нормативно-технической терминологии > нерациональный метод ограничения выбросов вредных веществ
118 модуль упругости мгновенный
мгновенный модуль упругости
Отношение напряжения к относительной деформации при очень быстром (мгновенном) деформировании.
[Сборник рекомендуемых терминов. Выпуск 82. Строительная механика. Академия наук СССР. Комитет научно-технической терминологии. 1970 г.]
модуль упругости мгновенный
Модуль упругости, определённый в момент приложения нагрузки
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]Тематики
- строительная механика, сопротивление материалов
EN
DE
FR
Русско-французский словарь нормативно-технической терминологии > модуль упругости мгновенный
119 программируемый логический контроллер
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-французский словарь нормативно-технической терминологии > программируемый логический контроллер
СтраницыСм. также в других словарях:
момент нагрузки — rus грузовой момент (м), момент (м) нагрузки eng load moment (cranes) fra moment (m) de la charge (par rapport à l axe d orientation) deu Lastmoment (n) spa momento (m) de la carga, par (m) de carga … Безопасность и гигиена труда. Перевод на английский, французский, немецкий, испанский языки
Момент силы — Размерность L2MT−2 Единицы измерения СИ Ньютон метр … Википедия
Момент сил — Момент силы (синонимы: крутящий момент; вращательный момент; вращающий момент) физическая величина, характеризующая вращательное действие силы на твёрдое тело. Момент силы приложенный к гаечному ключу Отношение между векторами силы, момента силы … Википедия
МОМЕНТ ЯДРОВЫЙ — момент внутренних сил в поперечном сечении внецентренно сжатого стержня оси, проходящей через точку пересечения контура ядра сечения с главной осью поперечного сечения, лежащей в плоскости действия нагрузки (Болгарский язык; Български) момент на… … Строительный словарь
Момент ядровый — – момент сил, заменяющий действие отброшенной части стержня на оставшуюся, при плоском внецентренном сжатии, взятый относительно оси, проходящей через точку пересечения контура ядра сечения с главной осью сечения, лежащей в плоскости… … Энциклопедия терминов, определений и пояснений строительных материалов
входной момент в синхронизм — Максимальный вращающий момент нагрузки, при котором синхронный двигатель, подключенный к питающей сети с номинальными напряжением и частотой может войти в синхронизм при подаче возбуждения. [ГОСТ 27471 87] Тематики машины электрические… … Справочник технического переводчика
Вращательный момент — Момент силы (синонимы: крутящий момент; вращательный момент; вращающий момент) физическая величина, характеризующая вращательное действие силы на твёрдое тело. Момент силы приложенный к гаечному ключу Отношение между векторами силы, момента силы … Википедия
Вращающий момент — Момент силы (синонимы: крутящий момент; вращательный момент; вращающий момент) физическая величина, характеризующая вращательное действие силы на твёрдое тело. Момент силы приложенный к гаечному ключу Отношение между векторами силы, момента силы … Википедия
Крутящий момент — Момент силы (синонимы: крутящий момент; вращательный момент; вращающий момент) физическая величина, характеризующая вращательное действие силы на твёрдое тело. Момент силы приложенный к гаечному ключу Отношение между векторами силы, момента силы … Википедия
Механический момент — Момент силы (синонимы: крутящий момент; вращательный момент; вращающий момент) физическая величина, характеризующая вращательное действие силы на твёрдое тело. Момент силы приложенный к гаечному ключу Отношение между векторами силы, момента силы … Википедия
минимальный вращающий момент в процессе пуска двигателя переменного тока — 3.14 минимальный вращающий момент в процессе пуска двигателя переменного тока (pull up torque of an a.c. motor): Наименьшее значение установившегося вращающего момента, развиваемого двигателем в диапазоне частот вращения от нуля до частоты… … Словарь-справочник терминов нормативно-технической документации
 18+© Академик, 2000-2024
18+© Академик, 2000-2024- Обратная связь: Техподдержка, Реклама на сайте
Экспорт словарей на сайты, сделанные на PHP, Joomla, Drupal, WordPress, MODx.
Перевод: с русского на все языки
со всех языков на русский- Со всех языков на:
- Русский
- С русского на:
- Все языки
- Английский
- Греческий
- Испанский
- Итальянский
- Казахский
- Немецкий
- Французский
- Чешский