-
101 программируемый логический контроллер
- speicherprogrammierbare Steuerung, f
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего. Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы. Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7. Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series. Рис. 4. Резервированный контроллер FCP270.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA). Рис. 5. Контроллер AC800M.
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-немецкий словарь нормативно-технической терминологии > программируемый логический контроллер
102 программируемый логический контроллер
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-английский словарь нормативно-технической терминологии > программируемый логический контроллер
103 программируемый логический контроллер
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-французский словарь нормативно-технической терминологии > программируемый логический контроллер
104 видный
прил.1. (син. заметный) курǎнуллǎ, курǎнакан; наш дом виден издалека пирĕн çурт инçетренех курǎнать2. (син. значительный, известный) паллǎ, сумлǎ; видный писатель паллǎ çыравçǎ3. (син. рослый, статный) кĕрнеклĕ, курǎмлǎ; видный мужчина кĕрнеклĕ арçын4. видно вводн. сл. (син. кажется, вероятно) ахǎртнех, пулĕ, пулмалла; видно, мы его не дождёмся эпир ǎна кĕтсе илейместпĕр пулмалла5. кого-что и с союзом «что», в знач. сказ. курǎнать; отсюда хорошо видно Волгу кунтан Атǎл лайǎх курǎнать ♦ как видно курǎнать ĕнтĕ; там видно будет куç курĕ унта105 видимый
прил. visibleСинонимический ряд:1. видно (прил.) видно; заметно; зримо; лицезримо; приметно; различимо2. испытываемо (прил.) ведаемо; вкушаемо; знаемо; испытываемо; познаваемо; пробуемо; узнаваемо3. представляемо (прил.) воображаемо; представляемо; рисуемо4. явно (прил.) очевидно; явно; явственно5. наверное (проч.) верно; вероятно; видно; должно быть; должно полагать; должно статься; как видно; наверно; наверное; надо думать; по видимости; по всей вероятности; по всем вероятиям; по всем видимостям; по-видимому106 видный
1. conspicuous2. it can be seen; it appears; apparently3. visible; outstanding; eminent; prominent; stately; portlyСинонимический ряд:1. видимо (прил.) видимо; заметно; зримо; приметно; различимо2. представительно (прил.) авантажно; внушительно; импозантно; представительно; презентабельно; солидно3. видать (проч.) видать; заметно4. наверное (проч.) верно; вероятно; видимо; должно быть; должно полагать; должно статься; как видно; наверно; наверное; надо думать; очевидно; по видимости; по всей вероятности; по всем вероятиям; по всем видимостям; по-видимому107 человеко-машинный интерфейс
- operator-machine communication
- MMI
- man-machine interface
- man-machine communication
- human-machine interface
- human-computer interface
- human interface device
- human interface
- HMI
- computer human interface
- CHI
человеко-машинный интерфейс (ЧМИ)
Технические средства, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование.
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства, дисплеи.
[ ГОСТ Р МЭК 60447-2000]
человекомашинный интерфейс (ЧМИ)
Технические средства контроля и управления, являющиеся частью оборудования, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование (ГОСТ Р МЭК 60447).
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства и дисплеи.
[ ГОСТ Р МЭК 60073-2000]
человеко-машинный интерфейс
Средства обеспечения двусторонней связи "оператор - технологическое оборудование" (АСУ ТП). Название класса средств, в который входят подклассы:
SCADA (Supervisory Control and Data Acquisition) - Операторское управление и сбор данных от технологического оборудования.
DCS (Distributed Control Systems) - Распределенная система управления технологическим оборудованием.
[ http://www.morepc.ru/dict/]Параллельные тексты EN-RU
MotorSys™ iPMCC solutions can integrate a dedicated human-machine interface (HMI) or communicate via a personal computer directly on the motor starters.
[Schneider Electric]Интеллектуальный центр распределения электроэнергии и управления электродвигателями MotorSys™ может иметь в своем составе специальный человеко-машинный интерфейс (ЧМИ). В качестве альтернативы используется обмен данным между персональным компьютером и пускателями.
[Перевод Интент]
HMI на базе операторских станций
Самое, пожалуй, главное в системе управления - это организация взаимодействия между человеком и программно-аппаратным комплексом. Обеспечение такого взаимодействия и есть задача человеко-машинного интерфейса (HMI, human machine interface).
На мой взгляд, в аббревиатуре “АСУ ТП” ключевым является слово “автоматизированная”, что подразумевает непосредственное участие человека в процессе реализации системой определенных задач. Очевидно, что чем лучше организован HMI, тем эффективнее человек сможет решать поставленные задачи.
Как же организован HMI в современных АСУ ТП?
Существует, как минимум, два подхода реализации функционала HMI:- На базе специализированных рабочих станций оператора, устанавливаемых в центральной диспетчерской;
- На базе панелей локального управления, устанавливаемых непосредственно в цеху по близости с контролируемым технологическим объектам.
Иногда эти два варианта комбинируют, чтобы достичь наибольшей гибкости управления. В данной статье речь пойдет о первом варианте организации операторского уровня.
Аппаратно рабочая станция оператора (OS, operator station) представляет собой ни что иное как персональный компьютер. Как правило, станция снабжается несколькими широкоэкранными мониторами, функциональной клавиатурой и необходимыми сетевыми адаптерами для подключения к сетям верхнего уровня (например, на базе Industrial Ethernet). Станция оператора несколько отличается от привычных для нас офисных компьютеров, прежде всего, своим исполнением и эксплуатационными характеристиками (а также ценой 4000 - 10 000 долларов).
На рисунке 1 изображена рабочая станция оператора системы SIMATIC PCS7 производства Siemens, обладающая следующими техническими характеристиками:
Процессор: Intel Pentium 4, 3.4 ГГц;
Память: DDR2 SDRAM до 4 ГБ;
Материнская плата: ChipSet Intel 945G;
Жесткий диск: SATA-RAID 1/2 x 120 ГБ;
Слоты: 4 x PCI, 2 x PCI E x 1, 1 x PCI E x 16;
Степень защиты: IP 31;
Температура при эксплуатации: 5 – 45 C;
Влажность: 5 – 95 % (без образования конденсата);
Операционная система: Windows XP Professional/2003 Server.
Рис. 1. Пример промышленной рабочей станции оператора.Системный блок может быть как настольного исполнения ( desktop), так и для монтажа в 19” стойку ( rack-mounted). Чаще применяется второй вариант: системный блок монтируется в запираемую стойку для лучшей защищенности и предотвращения несанкционированного доступа.
Какое программное обеспечение используется?
На станции оператора устанавливается программный пакет визуализации технологического процесса (часто называемый SCADA). Большинство пакетов визуализации работают под управлением операционных систем семейства Windows (Windows NT 4.0, Windows 2000/XP, Windows 2003 Server), что, на мой взгляд, является большим минусом.
Программное обеспечение визуализации призвано выполнять следующие задачи:- Отображение технологической информации в удобной для человека графической форме (как правило, в виде интерактивных мнемосхем) – Process Visualization;
- Отображение аварийных сигнализаций технологического процесса – Alarm Visualization;
- Архивирование технологических данных (сбор истории процесса) – Historical Archiving;
- Предоставление оператору возможности манипулировать (управлять) объектами управления – Operator Control.
- Контроль доступа и протоколирование действий оператора – Access Control and Operator’s Actions Archiving.
- Автоматизированное составление отчетов за произвольный интервал времени (посменные отчеты, еженедельные, ежемесячные и т.д.) – Automated Reporting.
Как правило, SCADA состоит из двух частей:
- Среды разработки, где инженер рисует и программирует технологические мнемосхемы;
- Среды исполнения, необходимой для выполнения сконфигурированных мнемосхем в режиме runtime. Фактически это режим повседневной эксплуатации.
Существует две схемы подключения операторских станций к системе управления, а точнее уровню управления. В рамках первой схемы каждая операторская станция подключается к контроллерам уровня управления напрямую или с помощью промежуточного коммутатора (см. рисунок 2). Подключенная таким образом операторская станция работает независимо от других станций сети, и поэтому часто называется одиночной (пусть Вас не смущает такое название, на самом деле таких станций в сети может быть несколько).

Рис. 2. Схема подключения одиночных операторских станций к уровню управления.Есть и другой вариант. Часто операторские станции подключают к серверу или резервированной паре серверов, а серверы в свою очередь подключаются к промышленным контроллерам. Таким образом, сервер, являясь неким буфером, постоянно считывает данные с контроллера и предоставляет их по запросу рабочим станциям. Станции, подключенные по такой схеме, часто называют клиентами (см. рисунок 3).
Как происходит информационный обмен?
Рис. 3. Клиент-серверная архитектура операторского уровня.
Для сопряжения операторской станции с промышленным контроллером на первой устанавливается специальное ПО, называемое драйвером ввода/вывода. Драйвер ввода/вывода поддерживает совместимый с контроллером коммуникационный протокол и позволяет прикладным программам считывать с контроллера параметры или наоборот записывать в него. Пакет визуализации обращается к драйверу ввода/вывода каждый раз, когда требуется обновление отображаемой информации или запись измененных оператором данных. Для взаимодействия пакета визуализации и драйвера ввода/вывода используется несколько протоколов, наиболее популярные из которых OPC (OLE for Process Control) и NetDDE (Network Dynamic Data Exchange). Обобщенно можно сказать, что OPC и NetDDE – это протоколы информационного обмена между различными приложениями, которые могут выполняться как на одном, так и на разных компьютерах. На рисунках 4 и 5 изображено, как взаимодействуют программные компоненты при различных схемах построения операторского уровня.
Рис. 4. Схема взаимодействия программных модулей при использовании одиночных станций.
Рис. 5. Схема взаимодействия программных модулей при использовании клиент-серверной архитектуры.
Как выглядит SCADA?
Разберем простой пример. На рисунке 6 приведена абстрактная схема технологического процесса, хотя полноценным процессом это назвать трудно. Рис. 6. Пример операторской мнемосхемы.
Рис. 6. Пример операторской мнемосхемы.
На рисунке 6 изображен очень упрощенный вариант операторской мнемосхемы для управления тех. процессом. Как видно, резервуар (емкость) наполняется водой. Задача системы - нагреть эту воду до определенной температуры. Для нагрева воды используется газовая горелка. Интенсивность горения регулируется клапаном подачи газа. Также должен быть насос для закачки воды в резервуар и клапан для спуска воды.
На мнемосхеме отображаются основные технологические параметры, такие как: температура воды; уровень воды в резервуаре; работа насосов; состояние клапанов и т.д. Эти данные обновляются на экране с заданной частотой. Если какой-либо параметр достигает аварийного значения, соответствующее поле начинает мигать, привлекая внимание оператора.
Сигналы ввода/вывода и исполнительные механизмы отображаются на мнемосхемах в виде интерактивных графических символов (иконок). Каждому типу сигналов и исполнительных механизмов присваивается свой символ: для дискретного сигнала это может быть переключатель, кнопка или лампочка; для аналогового – ползунок, диаграмма или текстовое поле; для двигателей и насосов – более сложные фейсплейты ( faceplates). Каждый символ, как правило, представляет собой отдельный ActiveX компонент. Вообще технология ActiveX широко используется в SCADA-пакетах, так как позволяет разработчику подгружать дополнительные символы, не входящие в стандартную библиотеку, а также разрабатывать свои собственные графические элементы, используя высокоуровневые языки программирования.
Допустим, оператор хочет включить насос. Для этого он щелкает по его иконке и вызывает панель управления ( faceplate). На этой панели он может выполнить определенные манипуляции: включить или выключить насос, подтвердить аварийную сигнализацию, перевести его в режим “техобслуживания” и т.д. (см. рисунок 7). Рис. 7. Пример фейсплейта для управления насосом.Оператор также может посмотреть график изменения интересующего его технологического параметра, например, за прошедшую неделю. Для этого ему надо вызвать тренд ( trend) и выбрать соответствующий параметр для отображения. Пример тренда реального времени показан на рисунке 8.
Рис. 7. Пример фейсплейта для управления насосом.Оператор также может посмотреть график изменения интересующего его технологического параметра, например, за прошедшую неделю. Для этого ему надо вызвать тренд ( trend) и выбрать соответствующий параметр для отображения. Пример тренда реального времени показан на рисунке 8.
 Рис. 8. Пример отображения двух параметров на тренде реального времени.
Рис. 8. Пример отображения двух параметров на тренде реального времени.
Для более детального обзора сообщений и аварийных сигнализаций оператор может воспользоваться специальной панелью ( alarm panel), пример которой изображен на рисунке 9. Это отсортированный список сигнализаций (alarms), представленный в удобной для восприятия форме. Оператор может подтвердить ту или иную аварийную сигнализацию, применить фильтр или просто ее скрыть. Рис. 9. Панель сообщений и аварийных сигнализаций.
Рис. 9. Панель сообщений и аварийных сигнализаций.
Говоря о SCADA, инженеры часто оперируют таким важным понятием как “тэг” ( tag). Тэг является по существу некой переменной программы визуализации и может быть использован как для локального хранения данных внутри программы, так и в качестве ссылки на внешний параметр процесса. Тэги могут быть разных типов, начиная от обычных числовых данных и кончая структурой с множеством полей. Например, один визуализируемый параметр ввода/вывода – это тэг, или функциональный блок PID-регулятора, выполняемый внутри контроллера, - это тоже тэг. Ниже представлена сильно упрощенная структура тэга, соответствующего простому PID-регулятору:
Tag Name = “MyPID”;
Tag Type = PID;
Fields (список параметров):
MyPID.OP
MyPID.SP
MyPID.PV
MyPID.PR
MyPID.TI
MyPID.DI
MyPID.Mode
MyPID.RemoteSP
MyPID.Alarms и т.д.
В комплексной прикладной программе может быть несколько тысяч тэгов. Производители SCADA-пакетов это знают и поэтому применяют политику лицензирования на основе количества используемых тэгов. Каждая купленная лицензия жестко ограничивает суммарное количество тэгов, которые можно использовать в программе. Очевидно, чем больше тегов поддерживает лицензия, тем дороже она стоит; так, например, лицензия на 60 000 тэгов может обойтись в 5000 тыс. долларов или даже дороже. В дополнение к этому многие производители SCADA формируют весьма существенную разницу в цене между “голой” средой исполнения и полноценной средой разработки; естественно, последняя с таким же количеством тэгов будет стоить заметно дороже.
Сегодня на рынке представлено большое количество различных SCADA-пакетов, наиболее популярные из которых представлены ниже:
1. Wonderware Intouch;
2. Simatic WinCC;
3. Iconics Genesis32;
4. Citect;
5. Adastra Trace Mode
Лидирующие позиции занимают Wonderware Intouch (производства Invensys) и Simatic WinCC (разработки Siemens) с суммарным количеством инсталляций более 80 тыс. в мире. Пакет визуализации технологического процесса может поставляться как в составе комплексной системы управления, так и в виде отдельного программного продукта. В последнем случае SCADA комплектуется набором драйверов ввода/вывода для коммуникации с контроллерами различных производителей. [ http://kazanets.narod.ru/HMI_PART1.htm]Тематики
- автоматизация, основные понятия
- автоматизированные системы
Синонимы
EN
Русско-английский словарь нормативно-технической терминологии > человеко-машинный интерфейс
108 трехфазный источник бесперебойного питания (ИБП)
трехфазный ИБП
-
[Интент]
Глава 7. Трехфазные ИБП... ИБП большой мощности (начиная примерно с 10 кВА) как правило предназначены для подключения к трехфазной электрической сети. Диапазон мощностей 8-25 кВА – переходный. Для такой мощности делают чисто однофазные ИБП, чисто трехфазные ИБП и ИБП с трехфазным входом и однофазным выходом. Все ИБП, начиная примерно с 30 кВА имеют трехфазный вход и трехфазный выход. Трехфазные ИБП имеют и другое преимущество перед однофазными ИБП. Они эффективно разгружают нейтральный провод от гармоник тока и способствуют более безопасной и надежной работе больших компьютерных систем. Эти вопросы рассмотрены в разделе "Особенности трехфазных источников бесперебойного питания" главы 8. Трехфазные ИБП строятся обычно по схеме с двойным преобразованием энергии. Поэтому в этой главе мы будем рассматривать только эту схему, несмотря на то, что имеются трехфазные ИБП, построенные по схеме, похожей на ИБП, взаимодействующий с сетью.
Схема трехфазного ИБП с двойным преобразованием энергии приведена на рисунке 18.
Рис.18. Трехфазный ИБП с двойным преобразованием энергииКак видно, этот ИБП не имеет почти никаких отличий на уровне блок-схемы, за исключением наличия трех фаз. Для того, чтобы увидеть отличия от однофазного ИБП с двойным преобразованием, нам придется (почти впервые в этой книге) несколько подробнее рассмотреть элементы ИБП. Мы будем проводить это рассмотрение, ориентируясь на традиционную технологию. В некоторых случаях будут отмечаться схемные особенности, позволяющие улучшить характеристики.
Выпрямитель
Слева на рис 18. – входная электрическая сеть. Она включает пять проводов: три фазных, нейтраль и землю. Между сетью и ИБП – предохранители (плавкие или автоматические). Они позволяют защитить сеть от аварии ИБП. Выпрямитель в этой схеме – регулируемый тиристорный. Управляющая им схема изменяет время (долю периода синусоиды), в течение которого тиристоры открыты, т.е. выпрямляют сетевое напряжение. Чем большая мощность нужна для работы ИБП, тем дольше открыты тиристоры. Если батарея ИБП заряжена, на выходе выпрямителя поддерживается стабилизированное напряжение постоянного тока, независимо от нвеличины напряжения в сети и мощности нагрузки. Если батарея требует зарядки, то выпрямитель регулирует напряжение так, чтобы в батарею тек ток заданной величины.
Такой выпрямитель называется шести-импульсным, потому, что за полный цикл трехфазной электрической сети он выпрямляет 6 полупериодов сингусоиды (по два в каждой из фаз). Поэтому в цепи постоянного тока возникает 6 импульсов тока (и напряжения) за каждый цикл трехфазной сети. Кроме того, во входной электрической сети также возникают 6 импульсов тока, которые могут вызвать гармонические искажения сетевого напряжения. Конденсатор в цепи постоянного тока служит для уменьшения пульсаций напряжения на аккумуляторах. Это нужно для полной зарядки батареи без протекания через аккумуляторы вредных импульсных токов. Иногда к конденсатору добавляется еще и дроссель, образующий совместно с конденсатором L-C фильтр.
Коммутационный дроссель ДР уменьшает импульсные токи, возникающие при открытии тиристоров и служит для уменьшения искажений, вносимых выпрямителем в электрическую сеть. Для еще большего снижения искажений, вносимых в сеть, особенно для ИБП большой мощности (более 80-150 кВА) часто применяют 12-импульсные выпрямители. Т.е. за каждый цикл трехфазной сети на входе и выходе выпрямителя возникают 12 импульсов тока. За счет удвоения числа импульсов тока, удается примерно вдвое уменьшить их амплитуду. Это полезно и для аккумуляторов и для электрической сети.
Двенадцати-импульсный выпрямитель фактически состоит из двух 6-импульсных выпрямителей. На вход второго выпрямителя (он изображен ниже на рис. 18) подается трехфазное напряжение, прошедшее через трансформатор, сдвигающий фазу на 30 градусов.
В настоящее время применяются также и другие схемы выпрямителей трехфазных ИБП. Например схема с пассивным (диодным) выпрямителем и преобразователем напряжения постоянного тока, применение которого позволяет приблизить потребляемый ток к синусоидальному.
Наиболее современным считается транзисторный выпрямитель, регулируемый высокочастотной схемой широтно-импульсной модуляции (ШИМ). Применение такого выпрямителя позволяет сделать ток потребления ИБП синусоидальным и совершенно отказаться от 12-импульсных выпрямителей с трансформатором.
Батарея
Для формирования батареи трехфазных ИБП (как и в однофазных ИБП) применяются герметичные свинцовые аккумуляторы. Обычно это самые распространенные модели аккумуляторов с расчетным сроком службы 5 лет. Иногда используются и более дорогие аккумуляторы с большими сроками службы. В некоторых трехфазных ИБП пользователю предлагается фиксированный набор батарей или батарейных шкафов, рассчитанных на различное время работы на автономном режиме. Покупая ИБП других фирм, пользователь может более или менее свободно выбирать батарею своего ИБП (включая ее емкость, тип и количество элементов). В некоторых случаях батарея устанавливается в корпус ИБП, но в большинстве случаев, особенно при большой мощности ИБП, она устанавливается в отдельном корпусе, а иногда и в отдельном помещении.
Инвертор
Как и в ИБП малой мощности, в трехфазных ИБП применяются транзисторные инверторы, управляемые схемой широтно-импульсной модуляции (ШИМ). Некоторые ИБП с трехфазным выходом имеют два инвертора. Их выходы подключены к трансформаторам, сдвигающим фазу выходных напряжений. Даже в случае применения относительно низкочастоной ШИМ, такая схема совместно с применением фильтра переменного тока, построенного на трансформаторе и конденсаторах, позволяет обеспечить очень малый коэффициент гармонических искажений на выходе ИБП (до 3% на линейной нагрузке). Применение двух инверторов увеличивает надежность ИБП, поскольку даже при выходе из строя силовых транзисторов одного из инверторов, другой инвертор обеспечит работу нагрузки, пусть даже при большем коэффициенте гармонических искажений.
В последнее время, по мере развития технологии силовых полупроводников, начали применяться более высокочастотные транзисторы. Частота ШИМ может составлять 4 и более кГц. Это позволяет уменьшить гармонические искажения выходного напряжения и отказаться от применения второго инвертора. В хороших ИБП существуют несколько уровней защиты инвертора от перегрузки. При небольших перегрузках инвертор может уменьшать выходное напряжение (пытаясь снизить ток, проходящий через силовые полупроводники). Если перегрузка очень велика (например нагрузка составляет более 125% номинальной), ИБП начинает отсчет времени работы в условиях перегрузки и через некоторое время (зависящее от степени перегрузки – от долей секунды до минут) переключается на работу через статический байпас. В случае большой перегрузки или короткого замыкания, переключение на статический байпас происходит сразу.
Некоторые современные высококлассные ИБП (с высокочакстотной ШИМ) имеют две цепи регулирования выходного напряжения. Первая из них осуществляет регулирование среднеквадратичного (действующего) значения напряжения, независимо для каждой из фаз. Вторая цепь измеряет мгновенные значения выходного напряжения и сравнивает их с хранящейся в памяти блока управления ИБП идеальной синусоидой. Если мгновенное значение напряжения отклонилось от соотвествующего "идеального" значения, то вырабатывается корректирующий импульс и форма синусоиды выходного напряжения исправляется. Наличие второй цепи обратной связи позволяет обеспечить малые искажения формы выходного напряжения даже при нелинейных нагрузках.
Статический байпас
Блок статического байпаса состоит из двух трехфазных (при трехфазном выходе) тиристорных переключателей: статического выключателя инвертора (на схеме – СВИ) и статического выключателя байпаса (СВБ). При нормальной работе ИБП (от сети или от батареи) статический выключатель инвертора замкнут, а статический выключатель байпаса разомкнут. Во время значительных перегрузок или выхода из строя инвертора замкнут статический переключатель байпаса, переключатель инвертора разомкнут. В момент переключения оба статических переключателя на очень короткое время замкнуты. Это позволяет обеспечить безразрывное питание нагрузки.
Каждая модель ИБП имеет свою логику управления и, соответственно, свой набор условий срабатывания статических переключателей. При покупке ИБП бывает полезно узнать эту логику и понять, насколько она соответствует вашей технологии работы. В частности хорошие ИБП сконструированы так, чтобы даже если байпас недоступен (т.е. отсутствует синхронизация инвертора и байпаса – см. главу 6) в любом случае постараться обеспечить электроснабжение нагрузки, пусть даже за счет уменьшения напряжения на выходе инвертора.
Статический байпас ИБП с трехфазным входом и однофазным выходом имеет особенность. Нагрузка, распределенная на входе ИБП по трем фазным проводам, на выходе имеет только два провода: один фазный и нейтральный. Статический байпас тоже конечно однофазный, и синхронизация напряжения инвертора производится относительно одной из фаз трехфазной сети (любой, по выбору пользователя). Вся цепь, подводящая напряжение к входу статического байпаса должна выдерживать втрое больший ток, чем входной кабель выпрямителя ИБП. В ряде случаев это может вызвать трудности с проводкой.
Сервисный байпас
Трехфазные ИБП имеют большую мощность и обычно устанавливаются в местах действительно критичных к электропитанию. Поэтому в случае выхода из строя какого-либо элемента ИБП или необходимости проведения регламентных работ (например замены батареи), в большинстве случае нельзя просто выключить ИБП или поставить на его место другой. Нужно в любой ситуации обеспечить электропитание нагрузки. Для этих ситуаций у всех трехфазных ИБП имеется сервисный байпас. Он представляет собой ручной переключатель (иногда как-то заблокированный, чтобы его нельзя было включить по ошибке), позволяющий переключить нагрузку на питание непосредственно от сети. У большинства ИБП для переключения на сервисный байпас существует специальная процедура (определенная последовательность действий), которая позволяет обеспечит непрерывность питания при переключениях.
Режимы работы трехфазного ИБП с двойным преобразованием
Трехфазный ИБП может работать на четырех режимах работы.
- При нормальной работе нагрузка питается по цепи выпрямитель-инвертор стабилизированным напряжением, отфильтрованным от импульсов и шумов за счет двойного преобразования энергии.
- Работа от батареи. На это режим ИБП переходит в случае, если напряжение на выходе ИБП становится таким маленьким, что выпрямитель оказывается не в состоянии питать инвертор требуемым током, или выпрямитель не может питать инвертор по другой причине, например из-за поломки. Продолжительность работы ИБП от батареи зависит от емкости и заряда батареи, а также от нагрузки ИБП.
- Когда какой-нибудь инвертор выходит из строя или испытывает перегрузку, ИБП безразрывно переходит на режим работы через статический байпас. Нагрузка питается просто от сети через вход статического байпаса, который может совпадать или не совпадать со входом выпрямителя ИБП.
- Если требуется обслуживание ИБП, например для замены батареи, то ИБП переключают на сервисный байпас. Нагрузка питается от сети, а все цепи ИБП, кроме входного выключателя сервисного байпаса и выходных выключателей отделены от сети и от нагрузки. Режим работы на сервисном байпасе не является обязательным для небольших однофазных ИБП с двойным преобразованием. Трехфазный ИБП без сервисного байпаса немыслим.
Надежность
Трехфазные ИБП обычно предназначаются для непрерывной круглосуточной работы. Работа нагрузки должна обеспечиваться практически при любых сбоях питания. Поэтому к надежности трехфазных ИБП предъявляются очень высокие требования. Вот некоторые приемы, с помощью которых производители трехфазных ИБП могут увеличивать надежность своей продукции. Применение разделительных трансформаторов на входе и/или выходе ИБП увеличивает устойчивость ИБП к скачкам напряжения и нагрузки. Входной дроссель не только обеспечивает "мягкий запуск", но и защищает ИБП (и, в конечном счете, нагрузку) от очень быстрых изменений (скачков) напряжения.
Обычно фирма выпускает целый ряд ИБП разной мощности. В двух или трех "соседних по мощности" ИБП этого ряда часто используются одни и те же полупроводники. Если это так, то менее мощный из этих двух или трех ИБП имеет запас по предельному току, и поэтому несколько более надежен. Некоторые трехфазные ИБП имеют повышенную надежность за счет резервирования каких-либо своих цепей. Так, например, могут резервироваться: схема управления (микропроцессор + платы "жесткой логики"), цепи управления силовыми полупроводниками и сами силовые полупроводники. Батарея, как часть ИБП тоже вносит свой вклад в надежность прибора. Если у ИБП имеется возможность гибкого выбора батареи, то можно выбрать более надежный вариант (батарея более известного производителя, с меньшим числом соединений).
Преобразователи частоты
Частота напряжения переменного тока в электрических сетях разных стран не обязательно одинакова. В большинстве стран (в том числе и в России) распространена частота 50 Гц. В некоторых странах (например в США) частота переменного напряжения равна 60 Гц. Если вы купили оборудование, рассчитанное на работу в американской электрической сети (110 В, 60 Гц), то вы должны каким-то образом приспособить к нему нашу электрическую сеть. Преобразование напряжения не является проблемой, для этого есть трансформаторы. Если оборудование оснащено импульсным блоком питания, то оно не чувствительно к частоте и его можно использовать в сети с частотой 50 Гц. Если же в состав оборудования входят синхронные электродвигатели или иное чувствительное к частоте оборудование, вам нужен преобразователь частоты. ИБП с двойным преобразованием энергии представляет собой почти готовый преобразователь частоты.
В самом деле, ведь выпрямитель этого ИБП может в принципе работать на одной частоте, а инвертор выдавать на своем выходе другую. Есть только одно принципиальное ограничение: невозможность синхронизации инвертора с линией статического байпаса из-за разных частот на входе и выходе. Это делает преобразователь частоты несколько менее надежным, чем сам по себе ИБП с двойным преобразованием. Другая особенность: преобразователь частоты должен иметь мощность, соответствующую максимальному возможному току нагрузки, включая все стартовые и аварийные забросы, ведь у преобразователя частоты нет статического байпаса, на который система могла бы переключиться при перегрузке.
Для изготовления преобразователя частоты из трехфазного ИБП нужно разорвать цепь синхронизации, убрать статический байпас (или, вернее, не заказывать его при поставке) и настроить инвертор ИБП на работу на частоте 60 Гц. Для большинства трехфазных ИБП это не представляет проблемы, и преобразователь частоты может быть заказан просто при поставке.
ИБП с горячим резервированием
В некоторых случаях надежности даже самых лучших ИБП недостаточно. Так бывает, когда сбои питания просто недопустимы из-за необратимых последствий или очень больших потерь. Обычно в таких случаях в технике применяют дублирование или многократное резервирование блоков, от которых зависит надежность системы. Есть такая возможность и для трехфазных источников бесперебойного питания. Даже если в конструкцию ИБП стандартно не заложено резервирование узлов, большинство трехфазных ИБП допускают резервирование на более высоком уровне. Резервируется целиком ИБП. Простейшим случаем резервирования ИБП является использование двух обычных серийных ИБП в схеме, в которой один ИБП подключен к входу байпаса другого ИБП.
Рис. 19а. Последовательное соединение двух трехфазных ИБП
На рисунке 19а приведена схема двух последовательно соединенным трехфазных ИБП. Для упрощения на рисунке приведена, так называемая, однолинейная схема, на которой трем проводам трехфазной системы переменного тока соответствует одна линия. Однолинейные схемы часто применяются в случаях, когда особенности трехфазной сети не накладывают отпечаток на свойства рассматриваемого прибора. Оба ИБП постоянно работают. Основной ИБП питает нагрузку, а вспомогательный ИБП работает на холостом ходу. В случае выхода из строя основного ИБП, нагрузка питается не от статического байпаса, как в обычном ИБП, а от вспомогательного ИБП. Только при выходе из строя второго ИБП, нагрузка переключается на работу от статического байпаса.
Система из двух последовательно соединенных ИБП может работать на шести основных режимах.
А. Нормальная работа. Выпрямители 1 и 2 питают инверторы 1 и 2 и, при необходимости заряжают батареи 1 и 2. Инвертор 1 подключен к нагрузке (статический выключатель инвертора 1 замкнут) и питает ее стабилизированным и защищенным от сбоев напряжением. Инвертор 2 работает на холостом ходу и готов "подхватить" нагрузку, если инвертор 1 выйдет из строя. Оба статических выключателя байпаса разомкнуты.
Для обычного ИБП с двойным преобразованием на режиме работы от сети допустим (при сохранении гарантированного питания) только один сбой в системе. Этим сбоем может быть либо выход из строя элемента ИБП (например инвертора) или сбой электрической сети.
Для двух последовательно соединенных ИБП с на этом режиме работы допустимы два сбоя в системе: выход из строя какого-либо элемента основного ИБП и сбой электрической сети. Даже при последовательном или одновременном возникновении двух сбоев питание нагрузки будет продолжаться от источника гарантированного питания.
Б. Работа от батареи 1. Выпрямитель 1 не может питать инвертор и батарею. Чаще всего это происходит из-за отключения напряжения в электрической сети, но причиной может быть и выход из строя выпрямителя. Состояние инвертора 2 в этом случае зависит от работы выпрямителя 2. Если выпрямитель 2 работает (например он подключен к другой электрической сети или он исправен, в отличие от выпрямителя 1), то инвертор 2 также может работать, но работать на холостом ходу, т.к. он "не знает", что с первым ИБП системы что-то случилось. После исчерпания заряда батареи 1, инвертор 1 отключится и система постарается найти другой источник электроснабжения нагрузки. Им, вероятно, окажется инвертор2. Тогда система перейдет к другому режиму работы.
Если в основном ИБП возникает еще одна неисправность, или батарея 1 полностью разряжается, то система переключается на работу от вспомогательного ИБП.
Таким образом даже при двух сбоях: неисправности основного ИБП и сбое сети нагрузка продолжает питаться от источника гарантированного питания.
В. Работа от инвертора 2. В этом случае инвертор 1 не работает (из-за выхода из строя или полного разряда батареи1). СВИ1 разомкнут, СВБ1 замкнут, СВИ2 замкнут и инвертор 2 питает нагрузку. Выпрямитель 2, если в сети есть напряжение, а сам выпрямитель исправен, питает инвертор и батарею.
На этом режиме работы допустим один сбой в системе: сбой электрической сети. При возникновении второго сбоя в системе (выходе из строя какого-либо элемента вспомогательного ИБП) электропитание нагрузки не прерывается, но нагрузка питается уже не от источника гарантированного питания, а через статический байпас, т.е. попросту от сети.
Г. Работа от батареи 2. Наиболее часто такая ситуация может возникнуть после отключения напряжения в сети и полного разряда батареи 1. Можно придумать и более экзотическую последовательность событий. Но в любом случае, инвертор 2 питает нагругку, питаясь, в свою очередь, от батареи. Инвертор 1 в этом случае отключен. Выпрямитель 1, скорее всего, тоже не работает (хотя он может работать, если он исправен и в сети есть напряжение).
После разряда батареи 2 система переключится на работу от статического байпаса (если в сети есть нормальное напряжение) или обесточит нагрузку.
Д. Работа через статический байпас. В случае выхода из строя обоих инверторов, статические переключатели СВИ1 и СВИ2 размыкаются, а статические переключатели СВБ1 и СВБ2 замыкаются. Нагрузка начинает питаться от электрической сети.
Переход системы к работе через статический байпас происходит при перегрузке системы, полном разряде всех батарей или в случае выхода из строя двух инверторов.
На этом режиме работы выпрямители, если они исправны, подзаряжают батареи. Инверторы не работают. Нагрузка питается через статический байпас.
Переключение системы на работу через статический байпас происходит без прерывания питания нагрузки: при необходимости переключения сначала замыкается тиристорный переключатель статического байпаса, и только затем размыкается тиристорный переключатель на выходе того инвертора, от которого нагрузка питалась перед переключением.
Е. Ручной (сервисный) байпас. Если ИБП вышел из строя, а ответственную нагрузку нельзя обесточить, то оба ИБП системы с соблюдением специальной процедуры (которая обеспечивает безразрыное переключение) переключают на ручной байпас. после этого можно производить ремонт ИБП.
Преимуществом рассмотренной системы с последовательным соединением двух ИБП является простота. Не нужны никакие дополнительные элементы, каждый из ИБП работает в своем штатном режиме. С точки зрения надежности, эта схема совсем не плоха:- в ней нет никакой лишней, (связанной с резервированием) электроники, соответственно и меньше узлов, которые могут выйти из строя.
Однако у такого соединения ИБП есть и недостатки. Вот некоторые из них.
- Покупая такую систему, вы покупаете второй байпас (на нашей схеме – он первый – СВБ1), который, вообще говоря, не нужен – ведь все необходимые переключения могут быть произведены и без него.
- Весь второй ИБП выполняет только одну функцию – резервирование. Он потребляет электроэнергию, работая на холостом ходу и вообще не делает ничего полезного (разумеется за исключением того времени, когда первый ИБП отказывается питать нагрузку). Некоторые производители предлагают "готовые" системы ИБП с горячим резервированием. Это значит, что вы покупаете систему, специально (еще на заводе) испытанную в режиме с горячим резервированием. Схема такой системы приведена на рис. 19б.
Рис.19б. Трехфазный ИБП с горячим резервированием
Принципиальных отличий от схемы с последовательным соединением ИБП немного.
- У второго ИБП отсутствует байпас.
- Для синхронизации между инвертором 2 и байпасом появляется специальный информационный кабель между ИБП (на рисунке не показан). Поэтому такой ИБП с горячим резервированием может работать на тех же шести режимах работы, что и система с последовательным подключением двух ИБП. Преимущество "готового" ИБП с резервированием, пожалуй только одно – он испытан на заводе-производителе в той же комплектации, в которой будет эксплуатироваться.
Для расмотренных схем с резервированием иногда применяют одно важное упрощение системы. Ведь можно отказаться от резервирования аккумуляторной батареи, сохранив резервирование всей силовой электроники. В этом случае оба ИБП будут работать от одной батареи (оба выпрямителя будут ее заряжать, а оба инвертора питаться от нее в случае сбоя электрической сети). Применение схемы с общей бетареей позволяет сэкономить значительную сумму – стоимость батареи.
Недостатков у схемы с общей батареей много:
- Не все ИБП могут работать с общей батареей.
- Батарея, как и другие элементы ИБП обладает конечной надежностью. Выход из строя одного аккумулятора или потеря контакта в одном соединении могут сделать всю системы ИБП с горячим резервирование бесполезной.
- В случае выхода из строя одного выпрямителя, общая батарея может быть выведена из строя. Этот последний недостаток, на мой взгляд, является решающим для общей рекомендации – не применять схемы с общей батареей.
Параллельная работа нескольких ИБПКак вы могли заметить, в случае горячего резервирования, ИБП резервируется не целиком. Байпас остается общим для обоих ИБП. Существует другая возможность резервирования на уровне ИБП – параллельная работа нескольких ИБП. Входы и выходы нескольких ИБП подключаются к общим входным и выходным шинам. Каждый ИБП сохраняет все свои элементы (иногда кроме сервисного байпаса). Поэтому выход из строя статического байпаса для такой системы просто мелкая неприятность.
На рисунке 20 приведена схема параллельной работы нескольких ИБП.
Рис.20. Параллельная работа ИБП
На рисунке приведена схема параллельной системы с раздельными сервисными байпасами. Схема система с общим байпасом вполне ясна и без чертежа. Ее особенностью является то, что для переключения системы в целом на сервисный байпас нужно управлять одним переключателем вместо нескольких. На рисунке предполагается, что между ИБП 1 и ИБП N Могут располагаться другие ИБП. Разные производителю (и для разных моделей) устанавливают свои максимальные количества параллеьно работающих ИБП. Насколько мне известно, эта величина изменяется от 2 до 8. Все ИБП параллельной системы работают на общую нагрузку. Суммарная мощность параллельной системы равна произведению мощности одного ИБП на количество ИБП в системе. Таким образом параллельная работа нескольких ИБП может применяться (и в основном применяется) не столько для увеличения надежности системы бесперебойного питания, но для увеличения ее мощности.
Рассмотрим режимы работы параллельной системы
Нормальная работа (работа от сети). Надежность
Когда в сети есть напряжение, достаточное для нормальной работы, выпрямители всех ИБП преобразуют переменное напряжение сети в постоянное, заряжая батареи и питая инверторы.
Инверторы, в свою очередь, преобразуют постоянное напряжение в переменное и питают нагрузку. Специальная управляющая электроника параллельной системы следит за равномерным распределением нагрузки между ИБП. В некоторых ИБП распределение нагрузки между ИБП производится без использования специальной параллельной электроники. Такие приборы выпускаются "готовыми к параллельной работе", и для использования их в параллельной системе достаточно установить плату синхронизации. Есть и ИБП, работающие параллельго без специальной электроники. В таком случае количество параллельно работающих ИБП – не более двух. В рассматриваемом режиме работы в системе допустимо несколько сбоев. Их количество зависит от числа ИБП в системе и действующей нагрузки.
Пусть в системе 3 ИБП мощностью по 100 кВА, а нагрузка равна 90 кВА. При таком соотношении числа ИБП и их мощностей в системе допустимы следующие сбои.
Сбой питания (исчезновение напряжения в сети)
Выход из строя любого из инверторов, скажем для определенности, инвертора 1. Нагрузка распределяется между двумя другими ИБП. Если в сети есть напряжение, все выпрямители системы работают.
Выход из строя инвертора 2. Нагрузка питается от инвертора 3, поскольку мощность, потребляемая нагрузкой меньше мощности одного ИБП. Если в сети есть напряжение, все выпрямители системы продолжают работать.
Выход из строя инвертора 3. Система переключается на работу через статический байпас. Нагрузка питается напрямую от сети. При наличии в сети нормального напряжения, все выпрямители работают и продолжают заряжать батареи. При любом последующем сбое (поломке статического байпаса или сбое сети) питание нагрузки прекращается. Для того, чтобы параллельная система допускала большое число сбоев, система должна быть сильно недогружена и должна включать большое число ИБП. Например, если нагрузка в приведенном выше примере будет составлять 250 кВА, то система допускает только один сбой: сбой сети или поломку инвертора. В отношении количества допустимых сбоев такая система эквивалентна одиночному ИБП. Это, кстати, не значит, что надежность такой параллельной системы будет такая же, как у одиночного ИБП. Она будет ниже, поскольку параллельная система намного сложнее одиночного ИБП и (при почти предельной нагрузке) не имеет дополнительного резервирования, компенсирующего эту сложность.
Вопрос надежности параллельной системы ИБП не может быть решен однозначно. Надежность зависит от большого числа параметров: количества ИБП в системе (причем увеличение количества ИБП до бесконечности снижает надежность – система становится слишком сложной и сложно управляемой – впрочем максимальное количество параллельно работающих модулей для известных мне ИБП не превышает 8), нагрузки системы (т.е. соотношения номинальной суммарной мощности системы и действующей нагрузки), примененной схемы параллельной работы (т.е. есть ли в системе специальная электроника для обеспечения распределения нагрузки по ИБП), технологии работы предприятия. Таким образом, если единственной целью является увеличение надежности системы, то следует серьезно рассмотреть возможность использование ИБП с горячим резервированием – его надежность не зависит от обстоятельств и в силу относительной простоты схемы практически всегда выше надежности параллельной системы.
Недогруженная система из нескольких параллельно работающих ИБП, которая способна реализвать описанную выше логику управления, часто также называется параллельной системой с резервированием.
Если нагрузка параллельной системы такова, что с ней может справиться меньшее, чем есть в системе количество ИБП, то инверторы "лишних" ИБП могут быть отключены. В некоторых ИБП такая логика управления подразумевается по умолчанию, а другие модели вообще лишены возможности работы в таком режиме. Инверторы, оставшиеся включенными, питают нагрузку. Коэффициент полезного действия системы при этом несколько возрастает. Обычно в этом режиме работы предусматривается некоторая избыточность, т.е. количестов работающих инверторов больше, чем необходимо для питания нагрузки. Тем самым обеспечивается резервирование. Все выпрямители системы продолжают работать, включая выпрямители тех ИБП, инверторы которых отключены.
В случае исчезновения напряжения в электрической сети, параллельная система переходит на работу от батареи. Все выпрямители системы не работают, инверторы питают нагрузку, получая энергию от батареи. В этом режиме работы (естественно) отсутствует напряжение в электрической сети, которое при нормальной работе было для ИБП не только источником энергии, но и источником сигнала синхронизации выходного напряжения. Поэтому функцию синхронизации берет на себя специальная параллельная электроника или выходная цепь ИБП, специально ориентированная на поддержание выходной частоты и фазы в соответствии с частотой и фазой выходного напряжения параллельно работающего ИБП.
Это режим, при котором вышли из строя один или несколько выпрямителей. ИБП, выпрямители которых вышли из строя, продолжают питать нагрузку, расходуя заряд своей батареи. Они выдает сигнал "неисправность выпрямителя". Остальные ИБП продолжают работать нормально. После того, как заряд разряжающихся батарей будет полностью исчерпан, все зависит от соотношения мощности нагрузки и суммарной мощности ИБП с исправными выпрямителями. Если нагрузка не превышает перегрузочной способности этих ИБП, то питание нагрузки продолжится (если у системы остался значительный запас мощности, то в этом режиме работы допустимо еще несколько сбоев системы). В случае, если нагрузка ИБП превышает перегрузочную способность оставшихся ИБП, то система переходит к режиму работы через статический байпас.
Если оставшиеся в работоспособном состоянии инверторы могут питать нагрузку, то нагрузка продолжает работать, питаясь от них. Если мощности работоспособных инверторов недостаточно, система переходит в режим работы от статического байпаса. Выпрямители всех ИБП могут заряжать батареи, или ИБП с неисправными инверторами могут быть полностью отключены для выполнения ремонта.
Работа от статического байпаса
Если суммарной мощности всех исправных инверторов параллельной системы не достаточно для поддержания работы нагрузки, система переходит к работе через статический байпас. Статические переключатели всех инверторов разомкнуты (исправные инверторы могут продолжать работать). Если нагрузка уменьшается, например в результате отключения части оборудования, параллельная система автоматически переключается на нормальный режим работы.
В случае одиночного ИБП с двойным преобразованием работа через статический байпас является практически последней возможностью поддержания работы нагрузки. В самом деле, ведь достаточно выхода из строя статического переключателя, и нагрузка будет обесточена. При работе параллельной системы через статический байпас допустимо некоторое количество сбоев системы. Статический байпас способен выдерживать намного больший ток, чем инвертор. Поэтому даже в случае выхода из строя одного или нескольких статических переключателей, нагрузка возможно не будет обесточена, если суммарный допустимый ток оставшихся работоспособными статических переключателей окажется достаточен для работы. Конкретное количество допустимых сбоев системы в этом режиме работы зависит от числа ИБП в системе, допустимого тока статического переключателя и величины нагрузки.
Если нужно провести с параллельной системой ремонтные или регламентные работы, то система может быть отключена от нагрузки с помощью ручного переключателя сервисного байпаса. Нагрузка питается от сети, все элементы параллельной системы ИБП, кроме батарей, обесточены. Как и в случае системы с горячим резервированием, возможен вариант одного общего внешнего сервисного байпаса или нескольких сервисных байпасов, встроенных в отдельные ИБП. В последнем случае при использовании сервисного байпаса нужно иметь в виду соотношение номинального тока сервисного байпаса и действующей мощности нагрузки. Другими словами, нужно включить столько сервисных байпасов, чтобы нагрузка не превышала их суммарный номинальных ток.
[ http://www.ask-r.ru/info/library/ups_without_secret_7.htm]Тематики
EN
Русско-английский словарь нормативно-технической терминологии > трехфазный источник бесперебойного питания (ИБП)
109 мастурбация
Как правило, произвольная ритмическая стимуляция гениталий, приводящая к сексуальному удовольствию с последующим оргазмом или без такового. Индивид может мастурбировать себя или другого, в одиночестве или в присутствии других лиц; сексуально возбуждающая самостимуляция может фокусироваться не на гениталиях, а на других эротогенных зонах; они могут стать областью предшественников перверсий. Мастурбация проявляется в течение всей жизни. Она может сопровождаться самыми разными чувствами и фантазиями, как сознательными, так и бессознательными. По мнению Фрейда, мастурбация является "первичной зависимостью"; другие зависимости, в частности, зависимость от алкоголя, морфия, табака и подобных веществ, возникают как замещающие ее.Инфантильная мастурбация, или генитальная игра, — один из многих типов аутоэротической детской активности. Это нормальная, прогрессивная с точки зрения развития активность, способствующая разрядке напряжения, благоприятствующая ранней дифференциации, научению, самоисследованию и самопознанию, указывающая на удовлетворительные отношения с осуществляющим заботу окружением. Мальчики обычно мастурбируют, манипулируя пенисом. Девочки могут мануально стимулировать клитор, но чаще они используют предметы либо потирают бедра друг о друга. В последнее время клиторальная сексуальность не рассматривается как мужская, а ее вытеснение не расценивается как необходимое условие для установления примата вагины или женской идентичности.Для того чтобы истинные мастурбационные фантазии начали ассоциироваться с активностью, необходима относительная зрелость Я. Лишь после становления константности восприятия объектов у маленького ребенка может сформироваться полноценная фантазия об объекте, удовлетворяющем потребность. Эдиповы фантазии относятся к объектам и связаны с захватом или угрозой возмездия (страх кастрации). Латентный период связан с борьбой против мастурбации и сопровождающих ее фантазий, что отражает развитие Сверх-Я. Такие защитные механизмы, как вытеснение, регрессия и реактивные образования, обеспечивают ранние характерологические изменения в этой фазе. Такая борьба с мастурбацией продолжается в отрочестве. С одной стороны, мастурбация помогает развитию, приводя догенитальные влечения к регуляции генитальной функцией. При этом мастурбационные фантазии благоприятствуют объектной отнесенности. С другой стороны, имеются регрессивные аспекты подобной активности, которым должны противодействовать новые достижения в развитии Я.Определенная неизвращенная мастурбация необходима для нормального развития ребенка. На протяжении жизни мастурбация может выполнять различные функции и иметь разное значение, как здоровое, так и патологическое.Компульсивная мастурбация (или ее эквиваленты) может возникнуть, когда тревога (страх кастрации) и чувство вины сопровождают деятельность индивида таким образом, что ему требуется постоянное подтверждение сохранности гениталий. Мастурбация становится патологической только в том случае, если индивид всегда предпочитает ее отношениям с доступным партнером. Мастурбация встречается также в таких формах патологии, как трансвестизм, вуайеризм и эксгибиционизм. Патологическая мастурбация иногда связана с острыми садомазохистскими перверсиями.Психическая мастурбация предполагает фантазии, достаточно интенсивные для того, чтобы привести к полной разрядке сексуального возбуждения без физической стимуляции. Мастурбация и связанные с ней фантазии предоставляют еще один путь, которым психоаналитик может приблизиться к сложной, множественно детерминированной деятельности Я.Догенитальный эквивалент мастурбации представляет собой половое возбуждение без мастурбации, когда имеет место бессознательная защита от сексуальных чувств и фантазий, и последние замаскированы разнообразными защитами. Сексуальную природу чувств можно распознать по их связи с несексуальной активностью типа авантюризма, рискованных игр, неосторожной езды. Борьба с мастурбацией и соответствующими фантазиями может проявляться в кусании ногтей, почесывании, трихотилломании (выдергивании волос, бровей или ресниц), трихофагии (кусании, жевании или проглатывании волос). Фантазии, связанные с оральными, анальными или уретральными компонентами сексуальности, становятся полностью бессознательными и смещаются на определенную деятельность Я.Те же элементы могут связываться с чертами характера, отражающими мастурбационные фантазии, в виде задиристости, преступной деятельности, повышенного интереса к провоцирующим тревогу событиям (таким, как несчастные случаи), компульсивных разговоров и других компульсивных или обсессивных симптомов. Фрейд рано начал наблюдение невротических симптомов, как видно по истерии; он считал, что они есть следствие борьбы против мастурбации и ассоциированных с ней фантазий. С ранними родительскими запретами мастурбации могут быть связаны такие обсессивные проявления, как самозапреты, самонаказания, стремление к наказанию (мазохизм). Страх (кастрации) и чувство вины, связанные с мастурбационным поведением и/или мастурбационными фантазиями, вызывают защитную регрессию к догенитальной фазе. В таких случаях эти желания проявляются в типичных компромиссных образованиях, продуцирующих многочисленные симптомы с разнообразными функциями.см. аутоэротизм\Лит.: [30, 233, 256, 593]110 интерфейс RS-485
интерфейс RS-485
Промышленный стандарт для полудуплексной передачи данных. Позволяет объединять в сеть протяженностью 1200 м до 32 абонентов.
[ http://www.morepc.ru/dict/]Интерфейс RS-485 - широко распространенный высокоскоростной и помехоустойчивый промышленный последовательный интерфейс передачи данных. Практически все современные компьютеры в промышленном исполнении, большинство интеллектуальных датчиков и исполнительных устройств, программируемые логические контроллеры наряду с традиционным интерфейсом RS-232 содержат в своем составе ту или иную реализацию интерфейса RS-485.
Интерфейс RS-485 основан на стандарте EIA RS-422/RS-485.
К сожалению, полноценного эквивалентного российского стандарта не существует, поэтому в данном разделе предлагаются некоторые рекомендации по применению интерфейса RS-485.
Традиционный интерфейс RS-232 в промышленной автоматизации применяется достаточно редко. Сигналы этого интерфейса передаются перепадами напряжения величиной (3...15) В, поэтому длина линии связи RS-232, как правило, ограничена расстоянием в несколько метров из-за низкой помехоустойчивости. Интерфейс RS-232 имеется в каждом PC–совместимом компьютере, где используется в основном для подключения манипулятора типа “мышь”, модема, и реже – для передачи данных на небольшое расстояние из одного компьютера в другой. Передача производится последовательно, пословно, каждое слово длиной (5...8) бит предваряют стартовым битом
и заканчивают необязательным битом четности и стоп-битами.
Интерфейс RS-232 принципиально не позволяет создавать сети, так как соединяет только 2 устройства (так называемое соединение “точка - точка”).

Сигналы интерфейса RS-485 передаются дифференциальными перепадами напряжения величиной (0,2...8) В, что обеспечивает высокую помехоустойчивость и общую длину линии связи до 1 км (и более с использованием специальных устройств – повторителей). Кроме того, интерфейс RS-485 позволяет создавать сети путем параллельного подключения многих устройств к одной физической линии (так называемая “мультиплексная шина”).
В обычном PC-совместимом персональном компьютере (не промышленного исполнения) этот интерфейс отсутствует, поэтому необходим специальный адаптер - преобразователь интерфейса RS-485/232.
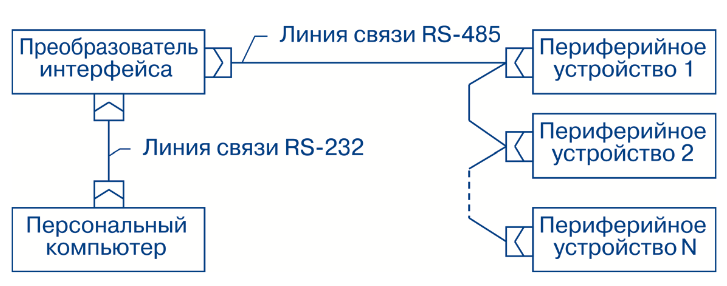
Наша компания рекомендует использовать полностью автоматические преобразователи интерфейса, не требующие сигнала управления передатчиком. Такие преобразователи, как правило, бывают двух видов:- преобразователи, требующие жесткого указания скорости обмена и длины передаваемого слова (с учетом стартовых, стоповых бит и бита четности) для расчета времени окончания передачи: например, преобразователь ADAM-4520 производства компании Advantech. Все параметры задаются переключателями в самом преобразователе, причем для задания этих параметров корпус преобразователя необходимо разобрать;
- преобразователи на основе технологий “Self Tuner” и им подобных, не требующие никаких указаний вообще, и, соответственно, не имеющие никаких органов управления: например, преобразователь I-7520 производства компании ICP DAS. Данный преобразователь предпочтительнее для использования в сетях с приборами МЕТАКОН.
В автоматических преобразователях выходы интерфейса RS-485 обычно имеют маркировку “DATA+” и “DATA-“. В I-7520 и ADAM-4520 вывод “DATA+” функционально эквивалентен выводу “A” регулятора МЕТАКОН, вывод “DATA-“ - выводу “B”.
Устройства, подключаемые к интерфейсу RS-485, характеризуются важным параметром по входу приемопередатчика: “единица нагрузки” (“Unit Load” - UL). По стандарту в сети допускается использование до 32 единиц нагрузки, т.е. до 32 устройств, каждое из которых нагружает линию в 1 UL. В настоящее время существуют микросхемы приемопередатчиков с характеристикой менее 1 UL, например - 0,25 UL. В этом случае количество физи
чески подключенных к линии устройств можно увеличить, но суммарное количество UL в одной линии не должно превышать 32.
В качестве линии связи используется экранированная витая пара с волновым сопротивлением ≈120 Ом. Для защиты от помех экран (оплетка) витой пары заземляется в любой точке, но только один раз: это исключает протекание больших токов по экрану из-за неравенства потенциалов “земли”. Выбор точки, в которой следует заземлять кабель, не регламентируется стандартом, но, как правило, экран линии связи заземляют на одном из ее концов.
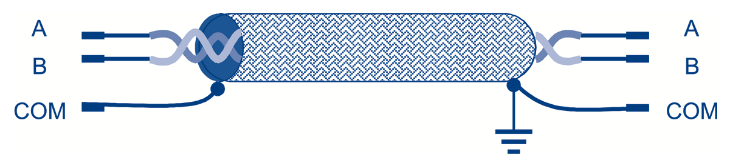
Устройства к сети RS-485 подключаются последовательно, с соблюдением полярности контактов A и B:
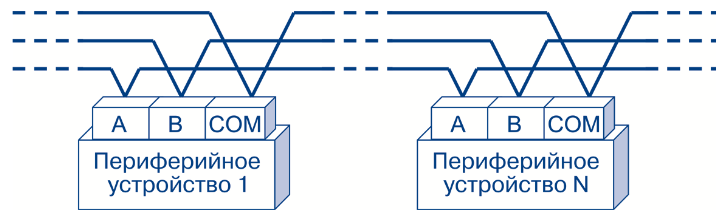
Как видно из рисунка, длинные ответвления (шлейфы) от магистрали до периферийных устройств не допускаются. Стандарт исходит из предположения, что длина шлейфа равна нулю, но на практике этого достичь невозможно (небольшой шлейф всегда имеется внутри любого периферийного устройства: от клеммы
до микросхемы приемопередатчика).
Качество витой пары оказывает большое влияние на дальность связи и максимальную скорость обмена в линии. Существуют специальные методики расчета допустимых скоростей обмена и максимальной длины линии связи, основанные на паспортных параметрах кабеля (волновое сопротивление, погонная емкость, активное сопротивление) и микросхем приемопередатчиков (допустимые искажения фронта сигнала). Но на относительно низких скоростях обмена (до 19200 бит/с) основное влияние на допустимую длину линии связи оказывает активное сопротивление кабеля. Опытным путем установлено, что на расстояниях до 600 м допускается использовать кабель с медной жилой сечением 0,35 мм (например, кабель КММ 2х0,35), на большие расстояния сечение кабеля необходимо пропорционально увеличить. Этот эмпирический результат хорошо согласуется с результатами, полученными расчетными методами.
Даже для скоростей обмена порядка 19200 бит/с кабель уже можно считать длинной линией, а любая длинная линия для исключения помех от отраженного сигнала должна быть согласована на концах. Для согласования используются резисторы
сопротивлением 120 Ом (точнее, с сопротивлением, равным волновому сопротивлению кабеля, но, как правило, используемые витые пары имеют волновое сопротивление около 120 Ом и точно подбирать резистор нет необходимости) и мощностью не менее 0,25 Вт – так называемый “терминатор”. Терминаторы устанавливаются на обоих концах линии связи, между контактами A и B витой пары.
В сетях RS-485 часто наблюдается состояние, когда все подключенные к сети устройства находятся в пассивном состоянии, т.е. в сети отсутствует передача и все приемопередатчики “слушают” сеть. В этом случае приемопередатчики не могут корректно распознать никакого устойчивого логического состояния в линии, а непосредственно после передачи все приемопередатчики распознают в линии состояние, соответствующее последнему переданному биту, что эквивалентно помехе в линии связи. На эту проблему не так часто обращают внимания, борясь с ее последствиями программными методами, но тем не менее решить ее аппаратно несложно. Достаточно с помощью специальных цепей смещения создать в линии потенциал, эквивалентный состоянию отсутствия передачи (так называемое состояние “MARK”: передатчик включен, но передача не ведется). Цепи смещения и терминатор реализованы в преобразователе I-7520. Для корректной работы цепей смещения необходимо наличие двух терминаторов в линии связи.
В сети RS-485 возможна конфликтная ситуация, когда 2 и более устройства начинают передачу одновременно. Это происходит в следующих случаях:
• в момент включения питания из-за переходных процессов устройства кратковременно могут находится в режиме передачи;
• одно или более из устройств неисправно;
• некорректно используется так называемый “мульти-мастерный” протокол, когда инициаторами обмена могут быть несколько устройств.
В первых двух случаях быстро устранить конфликт невозможно, что теоретически может привести к перегреву и выходу из строя приемопередатчиков RS-485. К счастью, такая ситуация предусмотрена стандартом и дополнительная защита приемопередатчика обычно не требуется. В последнем случае необходимо предусмотреть программное разделение канала между устройствами-инициаторами обмена, так как в любом случае для нормального функционирования линия связи может одновременно предоставляться только одному передатчику.
[ http://www.metodichka-contravt.ru/?id=3937]Тематики
EN
Русско-английский словарь нормативно-технической терминологии > интерфейс RS-485
111 В третьей области
- S
В третьей области показатель степени равен 8 - 10, а влажность отпускаемого пара более 0,2 %. В этой области процесс носит кризисный характер и действительный уровень воды в барабане приближается к пароотборным трубам.
Точка перехода из 2-й области в 3-ю называется критической и работа сепарационных устройств в этой области недопустима. Работа котла в 3-й области сильно зависит от нагрузки, при этом влажность отпускаемого пара составляет 0,2 - 1,0 % и более. Ленточные солемеры показывают резкое увеличение солесодержания пара (броски).
С паровой нагрузкой котла D связаны следующие характеристики сепарационных устройств:
массовая нагрузка зеркала испарения

осевая подъемная скорость пара
удельная паровая безразмерная нагрузка k [9[
где Fз.и. - площадь зеркала испарения (или площадь пароприемного потолка).
Следующий параметр, который существенно влияет на величину влажности пара, а значит и на величину критических нагрузок, это высота активного сепарационного объема. Связь между влажностью пара, паропроизводительностью и высотой парового объема hп можно представить следующей формулой [5]
 (4)
(4)где М- размерный коэффициент, определяемый физическими свойствами воды и пара.
Как видно из этой формулы, существует обратно пропорциональная зависимость между влажностью пара и высотой парового объема. Экспериментально было показано, что при увеличении высоты парового объема более 1000 мм, влажность пара уже практически мало зависит от дальнейшего ее увеличения [4] - [7].
На работу сепарационных устройств котлов существенное влияние оказывает солесодержание котловой воды (SKB). Проявляется это следующим образом. При работе котла при постоянной паропроизводительности при увеличении солесодержания котловой воды происходит очень плавное увеличение солесодержания пара, при достижении определенного значения солесодержания котловой воды происходит резкое увеличение влажности пара котла (солесодержания), регистрирующие солемеры отмечают резкое увеличение солесодержания пара (бросок). Объяснить это можно следующим образом: по мере увеличения концентрации веществ в котловой воде и прежде всего коллоидных частиц оксидов железа, шлама и др. веществ, поверхностный слой приобретает структурную вязкость. Длительность существования паровых пузырей до их разрушения увеличивается (набухание), пленки паровых пузырей успевают утониться и при разрыве их образуется большое количество мелких капель (трудно сепарируемых), вода приобретает способность к вспениванию. Значение солесодержания котловой воды, при котором происходит резкое увеличение влажности пара, называется критическим (
 ). Величина критического солесодержания зависит от давления пара в котле, конструкции сепарационных устройств, солевого состава воды («букета»), паровой нагрузки сепарационных устройств и т.д. Наиболее точно критическое солесодержание котловой воды можно определить только на основании теплохимических испытаний конкретного котла. Ориентировочно для котлов низкого давления величина критического солесодержания составляет около 3000 мг/кг, для котлов среднего давления - 1300 - 1500 мг/кг, а для котлов высокого давления - 300 - 500 мг/кг.
). Величина критического солесодержания зависит от давления пара в котле, конструкции сепарационных устройств, солевого состава воды («букета»), паровой нагрузки сепарационных устройств и т.д. Наиболее точно критическое солесодержание котловой воды можно определить только на основании теплохимических испытаний конкретного котла. Ориентировочно для котлов низкого давления величина критического солесодержания составляет около 3000 мг/кг, для котлов среднего давления - 1300 - 1500 мг/кг, а для котлов высокого давления - 300 - 500 мг/кг.Одним из вариантов приспособления работы котлов на воде закритического солесодержания при умеренных значениях непрерывной продувки является применение ступенчатого испарения котловой воды. Его сущность состоит в том, что водяной объем барабана и парообразующие циркуляционные контуры разбиваются на два или три независимых отсека с подачей всей питательной воды только в 1-й отсек и отводом воды в продувку из последнего отсека. При такой схеме питания резко возрастает «внутренняя» продувка первого (чистого) отсека, которая будет равна (nп + Р) % (при выполнении котла, например по двухступенчатой схеме испарения), а увеличение продувки будет составлять в
 раза, по сравнению с котлом без ступенчатого испарения. В связи с этим концентрация солей в котловой воде 1-й ступени резко уменьшается и соответственно улучшается качество пара. Для 2-й ступени испарения концентрация солей продувочной воды будет практически такой же, как и у котла без ступенчатого испарения (при одинаковых значениях непрерывных продувок Р = const для обеих схем). Если принять, что коэффициенты выноса (или влажность пара) до и после перевода котла на ступенчатое испарение были одинаковыми, то качество пара (солесодержание) котла при переводе на ступенчатое испарение будет выше, чем у котла с одноступенчатой схемой испарения. Если же качество пара (солесодержание) котла со ступенчатым испарением принять одинаковым, как и у котла без ступеней испарения, то тогда котел со ступенчатым испарением будет работать с меньшей величиной непрерывной продувки (чем котел без ступеней испарения). В отечественном котлостроении в качестве сепараторов пара последних ступеней испарения применяют, как правило, выносные циклоны. Выносные циклоны - это устройства, которые лучше всего приспособлены для работы на воде повышенного солесодержания. (За счет развития соответствующей паровой высоты и использования центробежных сил для подавления вспенивания).
раза, по сравнению с котлом без ступенчатого испарения. В связи с этим концентрация солей в котловой воде 1-й ступени резко уменьшается и соответственно улучшается качество пара. Для 2-й ступени испарения концентрация солей продувочной воды будет практически такой же, как и у котла без ступенчатого испарения (при одинаковых значениях непрерывных продувок Р = const для обеих схем). Если принять, что коэффициенты выноса (или влажность пара) до и после перевода котла на ступенчатое испарение были одинаковыми, то качество пара (солесодержание) котла при переводе на ступенчатое испарение будет выше, чем у котла с одноступенчатой схемой испарения. Если же качество пара (солесодержание) котла со ступенчатым испарением принять одинаковым, как и у котла без ступеней испарения, то тогда котел со ступенчатым испарением будет работать с меньшей величиной непрерывной продувки (чем котел без ступеней испарения). В отечественном котлостроении в качестве сепараторов пара последних ступеней испарения применяют, как правило, выносные циклоны. Выносные циклоны - это устройства, которые лучше всего приспособлены для работы на воде повышенного солесодержания. (За счет развития соответствующей паровой высоты и использования центробежных сил для подавления вспенивания).В котлах высокого давления наряду с капельным уносом имеет место значительный избирательный унос различных солей и прежде всего кремнекислоты (SiO2), за счет непосредственного физико-химического растворения солей в паре. Избирательный вынос кремнекислоты (при рН = 9,0 - 12,0) для котлов с давлением 115 кгс/см2 составляет 2,0 - 1,0 %, а для котлов с давлением 155 кгс/см2 - 4,0 - 2,5 % [9].
Для снижения кремнесодержания в паре котлов высокого давления в сепарационной схеме предусматривается паропромывочное устройство. Наличие этого устройства приводит к некоторым особенностям работы всей сепарационной схемы котлов высокого давления, по сравнению с котлами среднего давления.
В котлах высокого давления эффективность паропромывочного устройства характеризуется коэффициентом промывки
 (5)
(5)где SiO2н.п. - кремнесодержание пара на выходе из барабана;
SiO2н.п. - кремнесодержание питательной воды.
Коэффициент уноса с паропромывочного устройства Кпромопределяется по формуле
 (6)
(6)где SiO2пром - кремнесодержание воды на паропромывочном устройстве.
Для котлов высокого давления по данным испытаний Кпром составляет 8 - 10 %.
Кремнесодержание промывочной воды определяется по формуле
 (7)
(7)где SiO2сл - кремнесодержание воды на сливе с паропромывочного устройства.
Степень очистки пара на паропромывочном устройстве определяется по формуле
 (8)
(8)где SiO2н.п.(до) - кремнесодержание насыщенного пара до паропромывочного устройства.
Кремнесодержание пара до паропромывочного устройства определяется из следующей формулы
SiO2н.п.(до) = К · SiO2к.в, (9)
где SiO2к.в. - кремнесодержание котловой воды;
К - коэффициент уноса кремниевой кислоты из котловой воды в пар до промывки.
Из приведенных формул следует, что кремнесодержание пара после промывки (пар котла SiO2н.п.) зависит как от кремнесодержания питательной воды, так и от кремнесодержания пара до промывки.
В конечном итоге чем ниже будет кремнесодержание промывочной воды (SiO2пром), тем чище будет пар котла. Концентрация кремнекислоты в промывочном слое зависит, как от качества питательной воды, так и от количества кремнекислоты, поступающей из парового объема до промывки. При неналаженной работе сепарационных устройств до промывки, наряду с избирательным уносом [формула (9)] возможен вынос значительного количества капель котловой воды, где кремнесодержание в 5 - 8 раз выше, чем в питательной воде. Попадание капель котловой воды на промывку (капельный унос) приводит к увеличению кремнесодержания промывочной воды и, как следует из формулы (6), приводит к увеличению кремнесодержания пара котла.
Качество пара котла зависит от следующих основных факторов:
Источник: СО 34.26.729: Рекомендации по наладке внутрикотловых сепарационных устройств барабанных котлов
Русско-английский словарь нормативно-технической терминологии > В третьей области
112 исследование операций
исследование операций
—
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]
исследование операций
Прикладное направление кибернетики, используемое для решения практических организационных (в том числе экономических) задач. Это — комплексная научная дисциплина. Круг проблем, изучаемых ею, пока недостаточно определен. Иногда И.о. понимают очень широко, включая в него ряд чисто математических методов, иногда, наоборот, очень узко — как практическую методику решения с помощью экономико-математических моделей строго определенного перечня задач. Главный метод И.о. — системный анализ целенаправленных действий (операций) и объективная (в частности, количественная) сравнительная оценка возможных результатов этих действий. Например, расширение выпуска продукции на заводе требует одновременного и взаимосвязанного решения множества частных проблем: реконструкции предприятия, заказа оборудования, сырья и материалов, подготовки рынка сбыта, совершенствования технологии, изменений системы оперативно-производственного планирования и диспетчирования, организационной перестройки, перемещения руководящих работников и т.д. При анализе возможных последствий принимаемых решений приходится учитывать такие факторы, как неопределенность, случайность и риск. К решению столь сложных задач привлекают экономистов, математиков, статистиков, инженеров, социологов, психологов и др., поэтому одной из особенностей И.о. считают его междисциплинарный комплексный характер. Операционные исследования прежде всего предназначены для предварительного количественного обоснования принимаемых решений, поскольку они, как видно из примеров, очень сложны, требуют больших затрат и, главное, могут реализоваться многими способами (эти способы называют стратегиями или альтернативами). Кроме обоснования самих решений И.о. позволяет сравнить возможные варианты (альтернативы) организации операции, оценить возможное влияние на результат отдельных факторов, выявить «узкие места», т.е. те элементы системы, нарушение работы которых может особенно сильно сказаться на успехе операции и т.д. Таким образом, сущность задач И.о. — поиск путей рационального использования имеющихся ресурсов для реализации поставленной цели. Количественные методы И.о. строятся на основе достижений экономико-математических и математико-статистических дисциплин (теории массового обслуживания, оптимального программирования и т.д.). Разные математические методы применяются (в тех или иных комбинациях) при решении различных классов задач. Среди важнейших классов задач И.о. можно назвать задачи управления запасами, распределения ресурсов и назначения (распределительные задачи), задачи массового обслуживания, задачи замены оборудования, упорядочения и согласования (в том числе теории расписаний), состязательные (например, игры), задачи поиска и др. Среди применяемых методов — математическое программирование (линейное, нелинейное и т.п.), дифференциальные и разностные уравнения, методы теории графов, марковские процессы, теория игр, теория (статистических) решений, теория распознавания образов и ряд других. Считается, что И.о. зародилось накануне второй мировой войны, когда в Англии на одной радиолокационной станции была создана группа специалистов для решения технических задач с помощью математики. Они сосредоточили внимание на сравнении эффективности путей решения задач, поиске оптимального решения. Участие в этой группе представителей разных специальностей предопределило комплексный, или, как теперь принято говорить, системный подход. В настоящее время в этом направлении работают сотни исследовательских учреждений и групп в десятках стран. Организованы общества И.о., объединяемые международной федерацией (ИФОРС International Federation Of Operational Research Societies). Методы И.о., как и любые математические методы, всегда в той или иной мере упрощают, огрубляют задачу, отражая нелинейные процессы линейными моделями, стохастические системы — детерминированными и т.д. Жизнь богаче любой самой сложной схемы. Поэтому не следует ни преувеличивать значения количественных методов И.о., ни преуменьшать его, ссылаясь на примеры неудачных решений. Уместно привести в связи с этим известное парадоксальное определение, которое дал крупный американский специалист в этой области Т.А.Саати: «Исследование операций представляет собой искусство давать плохие ответы на те практические вопросы, на которые даются еще худшие ответы другими способами…»
[ http://slovar-lopatnikov.ru/]Тематики
- экономика
- электросвязь, основные понятия
EN
Русско-английский словарь нормативно-технической терминологии > исследование операций
113 должен быть
1. need to be2. needed to beдолжен быть; нужно — need to be
иметь дату, быть датированным — to bear date
Синонимический ряд:наверное (проч.) верно; вероятно; видимо; видно; должно полагать; должно статься; как видно; наверно; наверное; надо думать; очевидно; по видимости; по всей вероятности; по всем вероятиям; по всем видимостям; по-видимому114 наверно
1. probably; for certain; definitely; without fail2. surelyСинонимический ряд:1. наверное (проч.) верно; вероятно; видимо; видно; должно быть; должно полагать; должно статься; как видно; наверное; надо думать; очевидно; по видимости; по всей вероятности; по всем вероятиям; по всем видимостям; по-видимому2. точно (проч.) доподлинно; достоверно; наверняка; подлинно; точно115 наверное
probably; for certain; definitely; without failСинонимический ряд:1. наверное (проч.) верно; вероятно; видимо; видно; должно быть; должно полагать; должно статься; как видно; наверное; надо думать; очевидно; по видимости; по всей вероятности; по всем вероятиям; по всем видимостям; по-видимому2. точно (проч.) доподлинно; достоверно; наверно; наверняка; подлинно; точно116 по всей вероятности
1. in all likelihoodпо всей вероятности; по всей видимости — in all likelihood
2. most likely3. most probably4. much more likely5. in all probabilityСинонимический ряд:наверное (проч.) верно; вероятно; видимо; видно; должно быть; должно полагать; должно статься; как видно; наверно; наверное; надо думать; очевидно; по видимости; по всем вероятиям; по всем видимостям; по-видимомуРусско-английский большой базовый словарь > по всей вероятности
117 по-видимому
по-видимому, он хороший преподаватель — he is apparently a good teacher
Синонимический ряд:наверное (проч.) верно; вероятно; видимо; видно; должно быть; должно полагать; должно статься; как видно; наверно; наверное; надо думать; очевидно; по видимости; по всей вероятности; по всем вероятиям; по всем видимостям118 поди
come; go; try; I supposeСинонимический ряд:наверное (проч.) верно; вероятно; видимо; видно; должно быть; должно полагать; как видно; наверно; наверное; надо думать; очевидно; по видимости; по всей вероятности; по всем вероятиям; по всем видимостям; по-видимому119 чай
1. tea2. expectСинонимический ряд:1. чаепитие (сущ.) чаевничание; чаепитие; чайничанье2. думай (глаг.) думай; мни; мысли; полагай; считай3. надейся (глаг.) гадай; лелеять надежду; льстись; льстить себе надеждой; надейся; не терять надежды; питать надежду; рассчитывай; тешить себя надеждой; тешиться надеждой; уповай4. наверное (проч.) верно; вероятно; видимо; видно; должно быть; должно полагать; как видно; наверно; наверное; надо думать; очевидно; по видимости; по всей вероятности; по всем вероятиям; по всем видимостям; по-видимому120 название
(= имя, наименование) name, title• Как видно из названия... - As its name indicates,...; As the name suggests,...• Как вытекает из самого названия... - As its name implies,...• Как показывает название, публикация изначально... - The publication, as the title implies, is primarily concerned with...• Название "А... " объясняется тем, что... - The name "A... " arose from the fact that...; The name "A... " was derived from...• Эта функция настолько часто встречается, что мы дадим ей специальное название. - This function is so common that we give it a special name.СтраницыСм. также в других словарях:
как видно — думается, верно, очень может быть, по видимому, кажется, чаятельно, как мне кажется, очевидно, чай, может статься, может быть, по всем вероятностям, по всей видимости, по всем видимостям, по видимости, скорее всего, должно статься, как видится,… … Словарь синонимов
как видно — вводное выражение Выделяется знаками препинания или обособляется вместе с относящимися к нему словами. Подробно о пунктуации при вводных словах см. в Приложении 2. (↑Приложение 2) Со времени смерти стариков хозяйственные дела в деревне не только… … Словарь-справочник по пунктуации
как видно по всему — нареч, кол во синонимов: 1 • положительно (58) Словарь синонимов ASIS. В.Н. Тришин. 2013 … Словарь синонимов
как видно — см. видно; в зн. вводн. сл. По видимому, вероятно … Словарь многих выражений
видно — См. следовательно ни зги не видно... Словарь русских синонимов и сходных по смыслу выражений. под. ред. Н. Абрамова, М.: Русские словари, 1999. видно видать, заметно; следовательно; видимое дело, что ль, приметно, поди, как я погляжу, различимо,… … Словарь синонимов
как будто — См. казаться … Словарь синонимов
как я погляжу — по мне, насколько я могу судить, я чаю, на мой взгляд, сдается мне, видимо, вроде, как будто, мне видится, возможно, по моим мыслям, скорее всего, видно, по моему мнению, к тому идет, что, мне кажется, по всей видимости, пожалуй, как видится,… … Словарь синонимов
как мне кажется — с моей точки зрения, верней всего, пожалуй что, по всему вероятию, насколько я могу судить, считай, по моему разумению, как видится, как я погляжу, я чаю, вероятно, к тому дело идет, что, наверное, к тому идет, что, наверно, пожалуй, по моему,… … Словарь синонимов
ВИДНО — ВИДНО. 1. безл., в знач. сказуемого, с вин. (при отриц. с род.). Можно видеть, рассмотреть. Отсюда всю деревню видно. Из за горы дома не видно. || с союзом что . Можно видеть, понять. По всему видно, что он очень нуждается. 2. в знач. вводного… … Толковый словарь Ушакова
как видится — нареч, кол во синонимов: 36 • вернее всего (45) • верней всего (46) • верно (110) • … Словарь синонимов
как мне видится — нареч, кол во синонимов: 61 • вернее всего (45) • верней всего (46) • видно (84) • … Словарь синонимов
 18+© Академик, 2000-2024
18+© Академик, 2000-2024- Обратная связь: Техподдержка, Реклама на сайте
Экспорт словарей на сайты, сделанные на PHP, Joomla, Drupal, WordPress, MODx.