-
61 programmable controller
программируемый контроллер
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего. Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы. Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7. Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series. Рис. 4. Резервированный контроллер FCP270.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA). Рис. 5. Контроллер AC800M.
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > programmable controller
62 storage-programmable logic controller
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > storage-programmable logic controller
63 head
[hed] 1. сущ.1)а) головаfrom head to foot / heel, head to foot — с головы до пят
to bare one's head — обнажать голову, снимать шапку
to bow one's head — наклонять, склонять голову
to drop / hang / lower one's head — опускать голову
to lift / raise one's head — поднимать голову
to toss one's head — вскидывать голову, встряхнуть головой
good / strong head — крепкая голова (способность пить, не пьянея)
a good head for heights — способность не бояться высоты, не испытывать головокружения на высоте
a bad head for heights — боязнь высоты, головокружение ( при взгляде вниз с большой высоты)
I comb'd his comely head. — Я расчесал его миленькую головку.
в) жизньProofs enough against this scoundrel, Fritz, to cost him his head. — Против этого негодяя, Фриц, достаточно фактов, чтобы это стоило ему головы.
г) амер.; разг. головная боль ( вызванная ударом или алкогольным опьянением)I get one of those blinding heads. — У меня этот ужасный приступ головной боли.
She was lying down with a head. — Она лежала с головной болью.
2) ум, интеллект, умственные способностиaccounts which he kept in his head — счета, которые он держал в голове
to use one's head — соображать, хорошенько думать, шевелить мозгами
to cram / fill / stuff smb.'s head (with nonsense) — набивать чью-л. голову чепухой
to have a (good) head (up)on one's shoulders — иметь голову на плечах, быть умным, искусным
It is not your fault that you have no head for politics. (G. B. Shaw) — Не ваша вина, что вы совершенно не годитесь для политики.
cool head, level head — рассудок, рассудительность, спокойствие, хладнокровие
to keep a level head, keep one's head — владеть собой, сохранять спокойствие
to lose one's head — потерять спокойствие, выйти из себя
Syn:3)a head of Titian by his own hand — изображение головы Тициана, набросанное им самим
б) ( heads) лицевая сторона монеты ( с изображением головы), орёлHeads I win, (and) tails you lose. — В любом случае я выигрываю.; В любом случае ты проигрываешь.
в) диал.; разг. почтовая марка ( с изображением монарха)4)а) человекThose wise heads came to the conclusion that there was hope. — Эти мудрецы решили, что есть надежда.
He's a hot head. — Он горячая голова, горячий человек.
б) мн. head голова ( при подсчёте скота)в) неопределённое количество или скопление животных, дичиShooting tenants ought to be obliged to wire-in their woods where they kept a large head of rabbits. — Следовало обязать занимающихся охотой владельцев огородить проволокой свои леса, где они держали большое количество кроликов.
г) нарк. наркоман ( употребляющий тяжёлые наркотики; обычно в составе сложных слов)Syn:5)а) верхушка, верхняя часть (возвышенности, сооружения, шеста, мачты)б) наконечник (копья, дротика, стрелы), лезвие ( ножа), обух ( топора), боёк ( молота)г) относительно неподвижный конец мышцы, которым она прикрепляется к костид) луковицеобразное расширение стеклянной трубки, например, шарик термометраж) муз. часть ноты, определяющая её позицию на нотном стане ( в отличие от вертикальной линии)з) часть скрипки и других струнных инструментов, на которой крепятся колкии) верхняя часть смычка или та часть, где крепится волос смычкак) днище (бочки, бочонка и подобных сосудов); обтянутые кожей основания барабанал) архит. замочный камень ( свода); уст. капитель колонным) стр. верхний брус оконной / дверной коробкин) откидной верх экипажа, автомобиляо) веретено (весла, якоря)п) общее название более крупных пластинок (обычно их тринадцать) панциря черепахир) передняя лука седла; ручка гимнастического коняс) рога оленя, косули-самцат) оголовье уздечки, недоуздокSyn:6)а) любая округлая часть растения, обычно на конце стебля, например:головка (цветка, чеснока), кочан (капусты, кочанного салата), колос ( зерновых), шляпка ( гриба), семенная коробочка ( мака) и др.7)8)а) начало страницы; заголовок, отдел, рубрикаSyn:Headlines were larger and bolder and scare heads attracted readers. — Газетные шапки были крупнее и жирнее, а сенсационные заголовки привлекали читателей.
Syn:9) мед. назревшая головка нарыва, фурункула10) верхняя часть чего-л.: часть озера, куда впадает река; более высокий край долины; изголовье кровати; сторона могилы, где лежит голова покойного; сторона стола, где обычно сидит глава домаAnt:11)а) исток, верховье рекиThe head of the Mississippi River is in Minnesota. — Истоки Миссисипи находятся в штате Миннесота.
б) = fountainhead источник, начало, первоисточник•Syn:12)а) тех.; гидр. напор, давление столба жидкости; насыпь, дамба ( которые выдерживают напор воды)13)а) головная часть (процессии, колонны)The tallest boy stood at the head of the line. — Самый высокий мальчик стоял впереди всех.
14)а) передняя, носовая часть судна- down by the head- by the headб) = heads; мор. гальюнв) = heads; разг. уборная, сортир, отхожее местоSyn:15) геогр. мысSyn:16)а) глава, руководитель, начальникtitular head — формальный / номинальный директор
department head, head of the department — глава департамента, начальник отдела
Syn:б) = headmasterв) руководящее положение, лидирующее положениеThe studious girl graduated at the head of her class. — Прилежная девочка окончила школу лучше всех своих одноклассников.
17) результат, исход; высшая точка, кульминация; перелом, кризисto bring smth. to a head — доводить что-л. до кульминации
It might bring things to a head, one way or the other. — Тем или иным образом это может вызвать кризис.
But it is time to draw to a head this somewhat lengthened discussion. — Пора подвести эту затянувшуюся дискуссию к решающему моменту.
Syn:issue, result, conclusion, summing up, culmination, climax, crisis, peak, extremity, maturity, pitch, height18) ( heads) горн. руда ( чистая); концентрат ( высшего качества)19) метал. прибыль ( при литье)••to have an old head on young shoulders — иметь здравый смысл, быть не по годам умудрённым
- do smb.'s head in- do it standing on one's head
- do it on one's head
- out of head
- roof over smb.'s head
- over smb.'s head
- over one's head
- give head
- go to smb.'s head
- by the head and ears
- over head and ears
- head over ears
- give a horse his head
- keep one's head above water
- bring smth. to a head
- head over heels
- make head
- off one's head
- get one's head round smth.
- per head 2. прил.1) главный, старшийhead physician — главный, старший врач
Syn:2) верхний; передний3) встречныйhead tide, head current — встречное течение
4) предназначенный для ношения на голове; головной3. гл.1) = head up возглавлять, руководить, управлятьWhen the president died the vice president was chosen to head the firm. — Когда умер глава фирмы, руководить фирмой было поручено его заместителю.
Company requires capable and professional person to head up real estate department. — Фирме требуется способный профессиональный человек, который мог бы возглавить отдел недвижимости.
Syn:2) возглавлять, лидировать, быть в первых рядах; превосходитьThe Cambridge crew took the lead from the first, were never headed, and won by upwards of three lengths. — Команда Кембриджа с самого начала захватила лидерство, удерживала его и выиграла с преимуществом в три корпуса.
Syn:3)а) озаглавливать; помещать (обращение, имя) в начало страницыб) начинать, открывать (список, текст)At the last general election Mr. L. headed the poll with 4,159 votes. — На последних всеобщих выборах мистер Л. возглавил список, набрав 4159 голосов.
4) направлять (в какую-л. сторону)The Fram lay moored with her bow heading west. — Фрам стоял на якоре, повернув нос на запад.
Head the boat toward shore. — Направь лодку к берегу.
Syn:5) направляться, держать курс, следоватьWhen the rain stops let's head for the picnic grounds. — Когда дождь прекратится, давай отправимся к месту пикника.
Syn:6) направляться навстречу; сталкиваться; атаковать с фронтаHe has to cover his face with a muffler, and head the driving snow. — Ему приходится заматывать лицо шарфом и двигаться навстречу слепящему снегу.
7) = head off / back мешать, препятствовать прям. и перен.To head my rival off I indulged in a tremendous flirtation. — Чтобы помешать своему сопернику, я вовсю пустился флиртовать.
8) огибать, обходить (реку, озеро)It is shorter to cross a stream than to head it. — Быстрее переправиться через ручей, чем обходить его.
9) преим. амер. брать начало ( о реке)10)а) снабжать верхом, верхушкой, приделывать головкуб) формировать, составлять вершину, верхушкуtower headed by a spire — башня, заканчивающаяся шпилем
11) = head out, = head up формировать колос, колоситься ( о зерновых), завиваться ( о капусте)This cabbage heads early. — Этот сорт капусты рано образует кочаны.
12) = head down обрезать ветки, формируя крону, подрезать верхушку (дерева, куста)Syn:13) уст. обезглавливать14) спорт. отбивать мяч головой; играть головой15) ( head for)а) достигатьIt looks as if the firm is heading for another record year! — Кажется, в этом году наша фирма поставит очередной рекорд!
б) разг. рисковать, навлекать на себяYou're heading for an accident if you drive after drinking alcohol. — Если ты садишься пьяным за руль, ты рискуешь попасть в аварию.
•- head off
- head out
- head up64 double conversion UPS
источник бесперебойного питания с двойным преобразованием (энергии)
-
EN
double conversion
Topology of On-Line UPS (VFI class per IEC 62040-3). The AC mains voltage is converted to DC by means of an ac to DC Rectifier (or Charger), The DC voltage is then converted to conditioned AC by means of the Inverter.
[ http://www.upsonnet.com/UPS-Glossary/]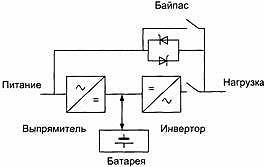
Структурная схема ИБП с двойным преобразованием энергииВся потребляемая из питающей сети энергия поступает на выпрямитель и преобразуется в энергию постоянного тока, а затем инвертором - в энергию переменного тока.
Высококачественные ИБП с двойным преобразованием энергии, как правило, имеют гальваническую развязку, что значительно улучшает помехоустойчивость защищаемого оборудования.
Обязательным элементом ИБП двойного преобразования большой и средней мощности является байпас - устройство обходного пути. Байпас представляет собой комбинированное электронно-механическое устройство, состоящее из так называемого статического байпаса и ручного (механического, контактного) байпаса.Достоинства
-
Нулевое время переключения.
В некоторых случаях данный фактор в настоящее время перестал играть решающую роль, потому что в современных компьютерах применяются блоки питания, соответствующие стандартам IEEE, согласно которым компьютер должен быть способен выдерживать перерыв в питании не менее 8.3 мс.
При этом в off-line ИБП, выпускаемых фирмой АРС время переключения не превышает 8 мс. - Строгая стабилизация выходного напряжения.
Недостатки
- Высокая стоимость,
- Повышенный уровень помех, вносимых самим ИБП в электрическую сеть,
- Более низкий КПД по сравнению с другими типами ИБП.
[ http://www.tcs.ru/reviews/?id=345 с изменениями]
Часто в качестве синонима термина ИПБ с двойным преобразованием употребляют термин on-line ИБП. Это не верно, так как в группу on-line ИБП входят ИБП четырех типов (см. источник бесперебойного питания активного типа).
В ИБП с двойным преобразованием вся потребляемая энергия поступает на выпрямитель и преобразуется в энергию постоянного тока, а затем инвертором — в энергию переменного тока.
Технология двойного преобразования отработана и успешно используется свыше двадцати лет, однако ей присущи принципиальные недостатки:
- ИБП является причиной гармонических искажений тока в электрической сети (до 30%) и, таким образом, — потенциально причиной нарушения работы другого оборудования, соединенного с электрической сетью; он имеет низкое значение входного коэффициента мощности (coscp);
- ИБП имеет значительные потери, так как принципом получения выходного переменного тока является первичное преобразование в энергию постоянного тока, а затем снова преобразование в энергию переменного тока; в процессе такого двойного преобразования обычно теряется до 10 % энергии.
Первый недостаток устраняется за счет применения дополнительных устройств (входных фильтров, 12-импульсных выпрямителей, оптимизаторов-бустеров), а второй принципиально не устраним (у лучших образцов ИБП большой мощности КПД не превышает 93 %).
Современные ИБП двойного преобразования оборудуются так называемыми кондиционерами гармоник и устройствами коррекции коэффициента мощности (coscp). Эти устройства входят либо в базовый комплект ИБП, либо применяются опционально и позволяют снять проблему с внесением гармонических искажений (составляют не более 3 %) и повысить коэффициент мощности до 0,98.
Существуют схемы ИБП с двойным преобразованием 1:1, 3:1 и 3:3. Это означает:- 1:1 — однофазный вход, однофазный выход;
- 3:1 — трехфазный вход, однофазный выход;
- 3:3 — трехфазный вход, трехфазный выход.
Схемы 1:1 и 3:1 целесообразно применять для мощностей нагрузки до 30 кВА, при этом симметрирование не требуется, и мощность инвертора используется рационально. Следует иметь в виду, что байпас в таких схемах является однофазным и при переходе ИБП с инвертора на байпас для входной сети ИБП 3:1 становится несимметричным устройством, подобно ИБП 1:1.
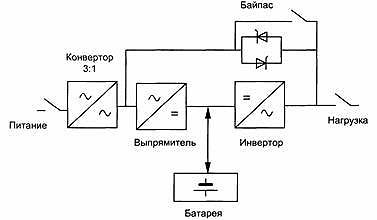
ИБП по схеме 3:1Особенностью данной схемы является наличие на входе конвертора 3:1. При его отсутствии ИБП имеет схему 1:1. Наличие конвертора не только превращает ИБП 1:1 в 3:1, но и позволяет осуществлять работу через байпас в симметричном режиме.
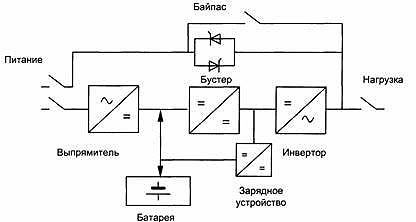
ИБП по схеме 3:3ИБП по схеме 3:3 в отличие от ИПБ по схеме 3:1 имеет зарядное устройство для оптимизации режима заряда аккумуляторной батареи и преобразователь постоянного тока — бустер (booster DC/DC), позволяющий облегчить работу выпрямителя за счет снижения глубины регулирования. Таким образом обеспечивается меньший уровень гармонических искажений входного тока. В некоторых случаях такую схему называют схемой с тройным преобразованием.
Принципиально нет предпосылок выделять такие схемы в отдельный тип ИБП, так как остается общим главный принцип — выпрямление тока с его последующим инвертированием. Разумеется, в звене постоянного тока могут присутствовать сглаживающие ёмкости, а в некоторых случаях — дроссель (на схемах не показаны). ИБП работает по схеме 3:3 в любом режиме — при работе через инвертор (режим on-line) и при работе через байпас. По отношению к питающей сети работа в режиме on-line является симметричной, тогда как работа через байпас зависит от баланса нагрузок по фазам. Впрочем, сбалансированность нагрузок по фазам в первую очередь важна для рационального использования установленной мощности самого источника, а по отношению к питающей сети небаланс по фазам при работе через байпас может проявить себя только при работе с ДГУ. Но в этом случае решающим будет не симметрия нагрузки, а её нелинейность.
[ http://electromaster.ru/modules/myarticles/article.php?storyid=365 с изменениями]
Тематики
Обобщающие термины
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > double conversion UPS
СтраницыСм. также в других словарях:
Быть самим собой — СЕБЯ, себе, собой (собою), о себе, мест. возвр. Толковый словарь Ожегова. С.И. Ожегов, Н.Ю. Шведова. 1949 1992 … Толковый словарь Ожегова
БЫТЬ САМИМ СОБОЙ СМЕРТЕЛЬНО — (Identity Kills), Германия, 2003, 87 мин. Драма. Выписавшись из психиатрической клиники, Карен возвращается домой, где застает сожителя Бена с его бывшей подругой и множество пьяных гостей. Карен разгоняет участников вечеринки. Она решает начать… … Энциклопедия кино
Оставаться (быть) самим собой — Оставаться (быть) САМИМ СОБОЙ. (Оставаться, быть) таким, какой есть, не изменяясь. В последнюю четверть столетия наши молодые художники имели ещё возможность, как ни бедны были, оставаться самими собой и не кривить душой в угоду рынку (В. Стасов … Фразеологический словарь русского литературного языка
переставший быть самим собой — прил., кол во синонимов: 1 • изменивший самому себе (3) Словарь синонимов ASIS. В.Н. Тришин. 2013 … Словарь синонимов
быть самим собой — Держаться естественно, вести себя сообразно своим свойствам, особенностям … Словарь многих выражений
САМИМ СОБОЙ — 1) делаться Без постороннего вмешательства; непроизвольно. Имеется в виду, что событие (p) происходит без посторонней помощи, независимо ни от кого и ни от чего, без каких л. целенаправленных усилий с чьей л. стороны. реч. стандарт. ✦ P делается… … Фразеологический словарь русского языка
НЕСПОСОБНОСТЬ ЧЕЛОВЕКА БЫТЬ САМИМ СОБОЙ — неумение человека вести себя в точном соответствии со своими психологическими особенностями, настроением, желаниями, его неумение открыто проявлять свои чувства … Словарь терминов по психологическому консультированию
Будь самим собой (Сверхъестественное) — Будь самим собой Free to be You and Me Номер эпизода 5 сезон, 3 эпизод Место действия Гарбер (Оклахома); Уотервилл (Мэн) Сверхъестественное Люцифер Рафаэль Автор сценария … Википедия
БЫТЬ ДЖОНОМ МАЛКОВИЧЕМ — «БЫТЬ ДЖОНОМ МАЛКОВИЧЕМ» (Being Jonh Malkovich), США, Universal Pictures, 1999. Комедия. Кукольник неудачник Крейг Шварц устраивается на работу в странную и невероятно тесную контору. В своем кабинете новоиспеченный клерк обнаруживает крошечную… … Энциклопедия кино
Оставаться самим собой — Разг. Быть естественным, непосредственным. ФСРЯ, 443 … Большой словарь русских поговорок
быть — наст. вр. нет (кроме 3 л. ед.: есть; книжн., 3 л. мн.: суть); будь, бу/дьте; был, была/, бы/ло см. тж. быть по сему, быть так, как не быть, может быть, быть може … Словарь многих выражений
 18+© Академик, 2000-2024
18+© Академик, 2000-2024- Обратная связь: Техподдержка, Реклама на сайте
Экспорт словарей на сайты, сделанные на PHP, Joomla, Drupal, WordPress, MODx.
Перевод: с английского на русский
с русского на английский- С русского на:
- Английский
- С английского на:
- Русский