-
81 передает высотные данные
Русско-английский военно-политический словарь > передает высотные данные
-
82 управление электропитанием
управление электропитанием
-
[Интент]
Управление электропитанием ЦОД
Автор: Жилкина Наталья
Опубликовано 23 апреля 2009 года
Источники бесперебойного питания, функционирующие в ЦОД, составляют важный элемент общей системы его энергообеспечения. Вписываясь в контур управления ЦОД, система мониторинга и управления ИБП становится ядром для реализации эксплуатационных функций.
Три задачи
Системы мониторинга, диагностики и управления питанием нагрузки решают три основные задачи: позволяют ИБП выполнять свои функции, оповещать персонал о происходящих с ними событиях и посылать команды для автоматического завершения работы защищаемого устройства.
Мониторинг параметров ИБП предполагает отображение и протоколирование состояния устройства и всех событий, связанных с его изменением. Диагностика реализуется функциями самотестирования системы. Управляющие же функции предполагают активное вмешательство в логику работы устройства.Многие специалисты этого рынка, отмечая важность процедуры мониторинга, считают, что управление должно быть сведено к минимуму. «Функция управления ИБП тоже нужна, но скорее факультативно, — говорит Сергей Ермаков, технический директор компании Inelt и эксперт в области систем Chloride. — Я глубоко убежден, что решения об активном управляющем вмешательстве в работу систем защиты электропитания ответственной нагрузки должен принимать человек, а не автоматизированная система. Завершение работы современных мощных серверов, на которых функционируют ответственные приложения, — это, как правило, весьма длительный процесс. ИБП зачастую не способны обеспечивать необходимое для него время, не говоря уж о времени запуска какого-то сервиса». Функция же мониторинга позволяет предотвратить наступление нежелательного события — либо, если таковое произошло, проанализировать его причины, опираясь не на слова, а на запротоколированные данные, хранящиеся в памяти адаптера или файлах на рабочей станции мониторинга.
Эту точку зрения поддерживает и Алексей Сарыгин, технический директор компании Radius Group: «Дистанционное управление мощных ИБП — это вопрос, к которому надо подходить чрезвычайно аккуратно. Если функции дистанционного мониторинга и диспетчеризации необходимы, то практика предоставления доступа персоналу к функциям дистанционного управления представляется радикально неверной. Доступность модулей управления извне потенциально несет в себе риск нарушения безопасности и категорически снижает надежность системы. Если существует физическая возможность дистанционно воздействовать на ИБП, на его параметры, отключение, снятие нагрузки, закрытие выходных тиристорных ключей или блокирование цепи байпаса, то это чревато потерей питания всего ЦОД».
Практически на всех трехфазных ИБП предусмотрена кнопка E.P.O. (Emergency Power Off), дублер которой может быть выведен на пульт управления диспетчерской. Она обеспечивает аварийное дистанционное отключение блоков ИБП при наступлении аварийных событий. Это, пожалуй, единственная возможность обесточить нагрузку, питаемую от трехфазного аппарата, но реализуется она в исключительных случаях.
Что же касается диагностики электропитания, то, как отмечает Юрий Копылов, технический директор московского офиса корпорации Eaton, в последнее время характерной тенденцией в управляющем программном обеспечении стал отказ от предоставления функций удаленного тестирования батарей даже системному администратору.
— Адекватно сравнивать состояние батарей необходимо под нагрузкой, — говорит он, — сам тест запускать не чаще чем раз в два дня, а разряжать батареи надо при одном и том же токе и уровне нагрузки. К тому же процесс заряда — довольно долгий. Все это не идет батареям на пользу.Средства мониторинга
Производители ИБП предоставляют, как правило, сразу несколько средств мониторинга и в некоторых случаях даже управления ИБП — все они основаны на трех основных методах.
В первом случае устройство подключается напрямую через интерфейс RS-232 (Com-порт) к консоли администратора. Дальность такого подключения не превышает 15 метров, но может быть увеличена с помощью конверторов RS-232/485 и RS-485/232 на концах провода, связывающего ИБП с консолью администратора. Такой способ обеспечивает низкую скорость обмена информацией и пригоден лишь для топологии «точка — точка».
Второй способ предполагает использование SNMP-адаптера — встроенной или внешней интерфейсной карты, позволяющей из любой точки локальной сети получить информацию об основных параметрах ИБП. В принципе, для доступа к ИБП через SNMP достаточно веб-браузера. Однако для большего комфорта производители оснащают свои системы более развитым графическим интерфейсом, обеспечивающим функции мониторинга и корректного завершения работы. На базе SNMP-протокола функционируют все основные системы мониторинга и управления ИБП, поставляемые штатно или опционально вместе с ИБП.
Стандартные SNMP-адаптеры поддерживают подключение нескольких аналоговых или пороговых устройств — датчик температуры, движения, открытия двери и проч. Интеграция таких устройств в общую систему мониторинга крупного объекта (например, дата-центра) позволяет охватить огромное количество точек наблюдения и отразить эту информацию на экране диспетчера.
Большое удобство предоставляет метод эксплуатационного удаленного контроля T.SERVICE, позволяющий отследить работу оборудования посредством телефонной линии (через модем GSM) или через Интернет (с помощью интерфейса Net Vision путем рассылки e-mail на электронный адрес потребителя). T.SERVICE обеспечивает диагностирование оборудования в режиме реального времени в течение 24 часов в сутки 365 дней в году. ИБП автоматически отправляет в центр технического обслуживания регулярные отчеты или отчеты при обнаружении неисправности. В зависимости от контролируемых параметров могут отправляться уведомления о неправильной эксплуатации (с пользователем связывается опытный специалист и рекомендует выполнить простые операции для предотвращения ухудшения рабочих характеристик оборудования) или о наличии отказа (пользователь информируется о состоянии устройства, а на место установки немедленно отправляется технический специалист).Профессиональное мнение
Наталья Маркина, коммерческий директор представительства компании SOCOMEC
Управляющее ПО фирмы SOCOMEC легко интегрируется в общий контур управления инженерной инфраструктурой ЦОД посредством разнообразных интерфейсов передачи данных ИБП. Установленное в аппаратной или ЦОД оборудование SOCOMEC может дистанционно обмениваться информацией о своих рабочих параметрах с системами централизованного управления и компьютерными сетями посредством сухих контактов, последовательных портов RS232, RS422, RS485, а также через интерфейс MODBUS TCP и GSS.
Интерфейс GSS предназначен для коммуникации с генераторными установками и включает в себя 4 входа (внешние контакты) и 1 выход (60 В). Это позволяет программировать особые процедуры управления, Global Supply System, которые обеспечивают полную совместимость ИБП с генераторными установками.
У компании Socomec имеется широкий выбор интерфейсов и коммуникационного программного обеспечения для установки диалога между ИБП и удаленными системами мониторинга промышленного и компьютерного оборудования. Такие опции связи, как панель дистанционного управления, интерфейс ADC (реконфигурируемые сухие контакты), обеспечивающий ввод и вывод данных при помощи сигналов сухих контактов, интерфейсы последовательной передачи данных RS232, RS422, RS485 по протоколам JBUS/MODBUS, PROFIBUS или DEVICENET, MODBUS TCP (JBUS/MODBUS-туннелирование), интерфейс NET VISION для локальной сети Ethernet, программное обеспечение TOP VISION для выполнения мониторинга с помощью рабочей станции Windows XP PRO — все это позволяет контролировать работу ИБП удобным для пользователя способом.
Весь контроль управления ИБП, ДГУ, контроль окружающей среды сводится в единый диспетчерский пункт посредством протоколов JBUS/MODBUS.
Индустриальный подход
Третий метод основан на использовании высокоскоростной индустриальной интерфейсной шины: CANBus, JBus, MODBus, PROFIBus и проч. Некоторые модели ИБП поддерживают разновидность универсального smart-слота для установки как карточек SNMP, так и интерфейсной шины. Система мониторинга на базе индустриальной шины может быть интегрирована в уже существующую промышленную SCADA-систему контроля и получения данных либо создана как заказное решение на базе многофункциональных стандартных контроллеров с выходом на шину. Промышленная шина через шлюзы передает информацию на удаленный диспетчерский пункт или в систему управления зданием (Building Management System, BMS). В эту систему могут быть интегрированы и контроллеры, управляющие ИБП.
Универсальные SCADA-системы поддерживают датчики и контроллеры широкого перечня производителей, но они недешевы и к тому же неудобны для внесения изменений. Но если подобная система уже функционирует на объекте, то интеграция в нее дополнительных ИБП не представляет труда.
Сергей Ермаков, технический директор компании Inelt, считает, что применение универсальных систем управления на базе промышленных контроллеров нецелесообразно, если используется для мониторинга только ИБП и ДГУ. Один из практичных подходов — создание заказной системы, с удобной для заказчика графической оболочкой и необходимым уровнем детализации — от карты местности до поэтажного плана и погружения в мнемосхему компонентов ИБП.
— ИБП может передавать одинаковое количество информации о своем состоянии и по прямому соединению, и по SNMP, и по Bus-шине, — говорит Сергей Ермаков. — Применение того или иного метода зависит от конкретной задачи и бюджета. Создав первоначально систему UPS Look для мониторинга ИБП, мы интегрировали в нее систему мониторинга ДГУ на основе SNMP-протокола, после чего по желанию одного из заказчиков конвертировали эту систему на промышленную шину Jbus. Новое ПО JSLook для мониторинга неограниченного количества ИБП и ДГУ по протоколу JBus является полнофункциональным средством мониторинга всей системы электроснабжения объекта.Профессиональное мение
Денис Андреев, руководитель департамента ИБП компании Landata
Практически все ИБП Eaton позволяют использовать коммуникационную Web-SNMP плату Connect UPS и датчик EMP (Environmental Monitoring Probe). Такой комплект позволяет в числе прочего осуществлять мониторинг температуры, влажности и состояния пары «сухих» контактов, к которым можно подключить внешние датчики.
Решение Eaton Environmental Rack Monitor представляет собой аналог такой связки, но с существенно более широким функционалом. Внешне эта система мониторинга температуры, влажности и состояния «сухих» контактов выполнена в виде компактного устройства, которое занимает минимум места в шкафу или в помещении.
Благодаря наличию у Eaton Environmental Rack Monitor (ERM) двух выходов датчики температуры или влажности можно разместить в разных точках стойки или помещения. Поскольку каждый из двух датчиков имеет еще по два сухих контакта, с них дополнительно можно принимать сигналы от датчиков задымления, утечки и проч. В центре обработки данных такая недорогая система ERM, состоящая из неограниченного количества датчиков, может транслировать информацию по протоколу SNMP в HTML-страницу и позволяет, не приобретая специального ПО, получить сводную таблицу измеряемых величин через веб-браузер.
Проблему дефицита пространства и высокой плотности размещения оборудования в серверных и ЦОД решают системы распределения питания линейки Eaton eDPU, которые можно установить как внутри стойки, так и на группу стоек.
Все модели этой линейки представляют четыре семейства: системы базового исполнения, системы с индикацией потребляемого тока, с мониторингом (локальным и удаленным, по сети) и управляемые, с возможностью мониторинга и управления электропитанием вплоть до каждой розетки. С помощью этих устройств можно компактным способом увеличить количество розеток в одной стойке, обеспечить контроль уровня тока и напряжения критичной нагрузки.
Контроль уровня потребляемой мощности может осуществляться с высокой степенью детализации, вплоть до сервера, подключенного к конкретной розетке. Это позволяет выяснить, какой сервер перегревается, где вышел из строя вентилятор, блок питания и т. д. Программным образом можно запустить сервер, подключенный к розетке ePDU. Интеграция системы контроля ePDU в платформу управления Eaton находится в процессе реализации.Требование объекта
Как поясняет Олег Письменский, в критичных объектах, таких как ЦОД, можно условно выделить две области контроля и управления. Первая, Grey Space, — это собственно здание и соответствующая система его энергообеспечения и энергораспределения. Вторая, White Space, — непосредственно машинный зал с его системами.
Выбор системы управления энергообеспечением ЦОД определяется типом объекта, требуемым функционалом системы управления и отведенным на эти цели бюджетом. В большинстве случаев кратковременная задержка между наступлением события и получением информации о нем системой мониторинга по SNMP-протоколу допустима. Тем не менее в целом ряде случаев, если характеристики объекта подразумевают непрерывность его функционирования, объект является комплексным и содержит большое количество элементов, требующих контроля и управления в реальном времени, ни одна стандартная система SNMP-мониторинга не обеспечит требуемого функционала. Для таких объектов применяют системы управления real-time, построенные на базе программно-аппаратных комплексов сбора данных, в том числе c функциями Softlogic.
Системы диспетчеризации и управления крупными объектами реализуются SCADA-системами, широкий перечень которых сегодня присутствует на рынке; представлены они и в портфеле решений Schneider Electric. Тип SCADA-системы зависит от класса и размера объекта, от количества его элементов, требующих контроля и управления, от уровня надежности. Частный вид реализации SCADA — это BMS-система(Building Management System).
«Дата-центры с объемом потребляемой мощности до 1,5 МВт и уровнем надежности Tier I, II и, с оговорками, даже Tier III, могут обслуживаться без дополнительной SCADA-системы, — говорит Олег Письменский. — На таких объектах целесообразно применять ISX Central — программно-аппаратный комплекс, использующий SNMP. Если же категория и мощность однозначно предполагают непрерывность управления, в таких случаях оправданна комбинация SNMP- и SCADA-системы. Например, для машинного зала (White Space) применяется ISX Central с возможными расширениями как Change & Capacity Manager, в комбинации со SCADA-системой, управляющей непосредственно объектом (Grey Space)».Профессиональное мнение
Олег Письменский, директор департамента консалтинга APC by Schneider Electric в России и СНГ
Подход APC by Schneider Electric к реализации полномасштабного полноуправляемого и надежного ЦОД изначально был основан на базисных принципах управления ИТ-инфраструктурой в рамках концепции ITIL/ITSM. И история развития системы управления инфраструктурой ЦОД ISX Manager, которая затем интегрировалась с программно-аппаратным комплексом NetBotz и трансформировалась в портал диспетчеризации ISX Central, — лучшее тому доказательство.
Первым итогом поэтапного приближения к намеченной цели стало наращивание функций контроля параметров энергообеспечения. Затем в этот контур подключилась система управления кондиционированием, система контроля параметров окружающей среды. Очередным шагом стало измерение скорости воздуха, влажности, пыли, радиации, интеграция сигналов от камер аудио- и видеонаблюдения, системы управления блоками розеток, завершения работы сервера и т. д.
Эта система не может и не должна отвечать абсолютно всем принципам ITSM, потому что не все они касаются существа поставленной задачи. Но как только в отношении политик и некоторых тактик управления емкостью и изменениями в ЦОД потребовался соответствующий инструментарий — это нашло отражение в расширении функционала ISX Central, который в настоящее время реализуют ПО APC by Schneider Electric Capacity Manager и APC by Schneider Electric Change Manager. С появлением этих двух решений, интегрированных в систему управления реальным объектом, АРС предоставляет возможность службе эксплуатации оптимально планировать изменения количественного и качественного состава оборудования машинного зала — как на ежедневном оперативном уровне, так и на уровне стратегических задач массовых будущих изменений.
Решение APC by Schneider Electric Capacity обеспечивает автоматизированную обработку информации о свободных ресурсах инженерной инфраструктуры, реальном потреблении мощности и пространстве в стойках. Обращаясь к серверу ISX Central, системы APC by Schneider Electric Capacity Manager и APC by Schneider Electric Change Manager оценивают степень загрузки ИБП и систем охлаждения InRow, прогнозируют воздействие предполагаемых изменений и предлагают оптимальное место для установки нового или перестановки имеющегося оборудования. Новые решения позволяют, выявив последствия от предполагаемых изменений, правильно спланировать замену оборудования в ЦОД.
Переход от частного к общему может потребовать интеграции ISX Central в такие, например, порталы управления, как Tivoli или Open View. Возможны и другие сценарии, когда ISX Central вписывается и в SCADA–систему. В этом случае ISX Central выполняет роль диспетчерской настройки, функционал которой распространяется на серверную комнату, но не охватывает целиком периметр объекта.Случай из практики
Решение задачи управления энергообеспечением ЦОД иногда вступает в противоречие с правилами устройств электроустановок (ПУЭ). Может оказаться, что в соответствии с ПУЭ в ряде случаев (например, при компоновке щитов ВРУ) необходимо обеспечить механические блокировки. Однако далеко не всегда это удается сделать. Поэтому такая задача часто требует нетривиального решения.
— В одном из проектов, — вспоминает Алексей Сарыгин, — где система управления включала большое количество точек со взаимными пересечениями блокировок, требовалось не допустить снижения общей надежности системы. В этом случае мы пришли к осознанному компромиссу, сделали систему полуавтоматической. Там, где это было возможно, присутствовали механические блокировки, за пультом дежурной смены были оставлены функции мониторинга и анализа, куда сводились все данные о положении всех автоматов. Но исполнительную часть вывели на отдельную панель управления уже внутри ВРУ, где были расположены подробные пользовательские инструкции по оперативному переключению. Таким образом мы избавились от излишней автоматизации, но постарались минимизировать потери в надежности и защититься от ошибок персонала.
[ http://www.computerra.ru/cio/old/products/infrastructure/421312/]Тематики
EN
Русско-английский словарь нормативно-технической терминологии > управление электропитанием
-
83 следящее окно
следящее окно
Метод надежной передачи данных по ненадежным каналам, при котором отправитель может передавать информацию с максимально возможной скоростью передачи, не ожидая приема квитанций. Все переданные N блоков (N - размер окна) хранятся в памяти передатчика. При получении положительной квитанции подтвержденный кадр удаляется из памяти, а окно сдвигается вправо (на следующий блок), позволяя включить в новый цикл передачи следующий блок, взамен переданного (см. рис. S-11). В спутниковых каналах с большой задержкой сигнала данный метод малоэффективен.
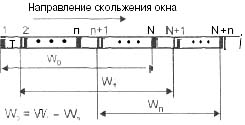
Рис. S-11. Метод скользящего окна
[Л.М. Невдяев. Телекоммуникационные технологии. Англо-русский толковый словарь-справочник. Под редакцией Ю.М. Горностаева. Москва, 2002]Тематики
- электросвязь, основные понятия
EN
Русско-английский словарь нормативно-технической терминологии > следящее окно
-
84 программируемый логический контроллер
- speicherprogrammierbare Steuerung, f
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего. Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы. Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7. Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series. Рис. 4. Резервированный контроллер FCP270.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA). Рис. 5. Контроллер AC800M.
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-немецкий словарь нормативно-технической терминологии > программируемый логический контроллер
85 программируемый логический контроллер
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-английский словарь нормативно-технической терминологии > программируемый логический контроллер
86 программируемый логический контроллер
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-французский словарь нормативно-технической терминологии > программируемый логический контроллер
87 с
аварийная связь с воздушным судномair distress communicationаварийная ситуация с воздушным судномaircraft emergencyавтомобиль с вильчатым подъемникомfork-liftагрегат с приводом от двигателяengine-driven unitамортизатор с большим ходом штокаlong-stroke shock strutанализатор с интегрированием по времениtime-integrating analyserантенна с концевым излучателемend-fire antennaантенна с широким раскрывомwide aperture antennaаренда воздушного судна вместе с экипажемaircraft wet leaseаэродинамическая труба с закрытой рабочей частьюclosed-throat wind tunnelаэродром с бетонным покрытиемconcrete-surfaced aerodromeаэродром с жестким покрытиемrigid pavement aerodromeаэродром с командно-диспетчерской службойcontrolled aerodromeаэродром с перекрещивающимися ВППX-type aerodromeаэродром с твердым покрытиемhard surface aerodromeаэродром с травяным покрытиемgrass aerodromeбак с наддувомpressurized tankбилет с несколькими полетными купонамиmultistop ticketбилет с открытой датойopen-data ticketбилет с подтвержденной броньюbooked ticketблок связи автопилота с радиостанциейradio-autopilot couplerблок связи с курсовой системойcompass system coupling unitблок связи с радиолокационным оборудованиемradar coupling unitблок совмещения радиолокационного изображения с картойchart-matching deviceборьба с обледенениемdeicingборьба с пожаром1. fire fighting2. fire-fighting ведомый с помощью радиолокатораradar-guidedвертолет большой грузоподъемности с внешней подвескойflying crane helicopterвертолет с несколькими несущими винтамиmultirotorвертолет с одним несущим винтом1. single main rotor helicopter2. single-rotor ветер с левым вращениемveering windветер с правым вращениемbacking windвзлетать с боковым ветромtakeoff with crosswindвзлет с боковым ветромcrosswind takeoffвзлет с впрыском водыwet takeoffвзлет с использованием влияния землиground effect takeoffвзлет с крутым набором высотыclimbing takeoffвзлет с ограниченной площадкиspot takeoffвзлет с ракетным ускорителемrocket-assisted takeoffвзлет с реактивным ускорителемjet-assisted takeoffвключать подачу топлива из бака с помощью электрического кранаswitch to the proper tankвключать подачу топлива из бока с помощью механического кранаturn the proper tank onвоздухозаборник с пусковым регулированиемcontrolled-starting intakeвоздухозаборник с регулируемой передней кромкойvariable lip air intakeвоздухозаборник с фиксированной передней кромкойfixed-lip air intakeвоздушное пространство с запретом визуальных полетовvisual exempted airspaceвоздушное судно с верхним расположением крылаhigh-wing aircraftвоздушное судно с газотурбинными двигателямиturbine-engined aircraftвоздушное судно с двумя двигателямиtwin-engined aircraftвоздушное судно с двумя и более двигателямиmultiengined aircraftвоздушное судно с неподвижным крыломfixed-wing aircraftвоздушное судно с несущим винтомrotary-wing aircraftвоздушное судно с несущим фюзеляжемlift-fuselage aircraftвоздушное судно с низким расположением крылаlow-wing aircraftвоздушное судно с одним двигателем1. single-engined aircraft2. one-engined aircraft воздушное судно с одним пилотомsingle-pilot aircraftвоздушное судно с поршневым двигателемpiston-engined aircraftвоздушное судно с треугольным крыломdelta-wing aircraftвоздушное судно с турбовинтовыми двигателямиturboprop aircraftвоздушное судно с турбореактивными двигателямиturbojet aircraftвоздушное судно с убранной механизацией крылаclean aircraftвоздушное судно с удлиненным фюзеляжемstretched aircraftвоздушное судно с узким фюзеляжемnarrow-body aircraftвоздушное судно с фюзеляжем типовой схемыregular-body aircraftвоздушное судно с экипажем из нескольких человекmulticrew aircraftвоздушные перевозки с большим количеством промежуточных остановокmultistop serviceвоздушный винт с автоматически изменяемым шагомautomatic pitch propellerвоздушный винт с автоматической регулировкойautomatically controllable propellerвоздушный винт с большим шагомhigh-pitch propellerвоздушный винт с гидравлическим управлением шагаhydraulic propellerВПП с гладкой поверхностьюsmooth runwayВПП с дерновым покрытиемsodded runwayВПП с жестким покрытиемrigid pavement runwayВПП с искусственным покрытиемpaved runwayВПП с мягким покрытиемsoft-surface runwayВПП с низким коэффициентом сцепленияslippery runwayВПП с поперечным уклономcross-sloped runwayВПП с твердым покрытиемhard-surface runwayВПП с травяным покрытием1. grass strip2. turf runway вращаться с заеданиемbe stiff to rotateвременно снимать с эксплуатацииlay upвремя налета с инструкторомflying dual instruction timeв соответствии с техническими условиямиin conformity with the specificationsвтулка с устройством для флюгированияfeathering hubвходное устройство с использованием сжатия воздуха на входеinternal-compression inletвыдерживание курса полета с помощью инерциальной системыinertial trackingвыключатель с нормально замкнутыми контактамиnormally closed switchвыключатель с нормально разомкнутыми контактамиnormally open switchвыполнение полетов с помощью радиосредствradio flyвыполнять полеты с аэродромаoperate from the aerodromeвыпуск шасси с помощью скоростного напораwind-assisted extensionвыруливать с места стоянкиleave a parking areaвысотомер с кодирующим устройствомencoding altimeterвысотомер с сигнализаторомcontacting altimeterвыходить на курс с левым разворотомroll left on the headingвыходить на курс с правым разворотомroll right on the headingгазотурбинный двигатель с осевым компрессоромaxial-flow итьбю.gas turbine engineгенератор с приводом от двигателяengine-driven generatorгенератор с шунтовой обмоткойshunt wound generatorгерметизация фонаря кабины с помощью шлангаcanopy strip sealгироскоп с воздушной опорой осейair bearing gyroscopeглушитель с убирающейся сдвижной створкойretractable spade silencerглушитель с убирающимися ковшамиretractable lobe silencerгроза с градомthunderstorm with hailгроза с пыльной бурейthunderstorm with duststormгрузовое воздушное судно с откидной носовой частьюbow-loaderдальность полета с максимальной загрузкойfull-load rangeдальность полета с полной коммерческой загрузкойcommercial rangeданные, полученные с бортаair-derived dataдвигатель с большим ресурсомlonger-lived engineдвигатель с высокой степенью двухконтурностиhigh bypass ratio engineдвигатель с высокой степенью сжатияhigh compression ratio engineдвигатель с левым вращением ротораleft-hand engineдвигатель с низкой степенью двухконтурностиlow bypass ratio engineдвигатель с пониженной тягойderated engineдвигатель с правым вращением ротораright-hand engineдвижение с левым кругомleft-hand trafficдвижение с правым кругомright-hand trafficдвухконтурный турбореактивный двигатель с дожиганием топлива во втором контуреduct burning bypass engineдистанционное управление рулями с помощью электроприводовfly-by-wireдиффузор с косым скачком уплотненияoblique-shock diffuserдонесение с бортаair reportзадерживать рейс с коммерчески оправданными целямиjustify a delay commerciallyзадержка вылета с целью стыковкиlayoverзакрылок с внешним обдувомexternal blown flapзакрылок с дополнительным внутренним обдувомaugmented internal blown flapзакрылок с отсосом пограничного слояsuction flapзализ крыла с фюзеляжемwing-to-fuselage filletзамер с целью определения положенияspot measurementзапас устойчивости с застопоренным управлениемmargin with stick fixedзапуск двигателя с забросом температурыengine hot starting(выше допустимой) заход на посадку не с прямойnonstraight-in approachзаход на посадку с выпущенными закрылкамиapproach with flaps downзаход на посадку с использованием бортовых и наземных средствcoupled approachзаход на посадку с левым разворотомleft-hand approachзаход на посадку с непрерывным снижениемcontinuous descent approachзаход на посадку с обратным курсом1. back course approach2. one-eighty approach заход на посадку с отворотом на расчетный уголteardrop approachзаход на посадку с правым разворотомright-hand approachзаход на посадку с прямойstraight-in approachзаход на посадку с прямой по приборамstraight-in ILS-type approachзаход на посадку с уменьшением скоростиdecelerating approachзона воздушного пространства с особым режимом полетаairspace restricted areaизбегать столкновения с препятствиемavoid the obstacleимпульсный огонь с конденсаторным разрядомcapacitor discharge lightиндикатор с круговой шкалойdial test indicatorиспытание с имитацией аварииcontrolled-crash testиспытание с наружной подвескойstore testкабина с двойным управлениемdual cockpitканал с общей несущейcommon carrier channelкарта с навигационной сеткойgrid mapквалификационная отметка с ограниченным сроком действияexpiry-type ratingключ с круглой головкойring wrenchключ с трещоткойratchet wrenchкомпоновка кресел с минимальным шагомhigh-density seatingконечный удлиненный заход на посадку с прямойlong final straight-in-approach operationконструкция с работающей обшивкойstressed-skin structureконтакт с объектами на землеground contactконфигурация с акустической облицовкойacoustic lining configurationконфигурация с выпущенной механизациейout-clean configurationконфигурация с выпущенными шасси и механизациейdirty configurationкрен с помощью элероновaileron rollкресло с отклоняющейся спинкойreclining seatкрыло с изменяемой площадьюvariable-area wingкрыло с изменяемым углом установкиvariable-incidence wingкрыло с механизацией для обеспечения большей подъемной силыhigh-lift devices wingкрыло с отрицательным углом поперечного ВЭanhedral wingкрыло с положительным углом поперечного ВЭdihedral wingкрыло с работающей обшивкойstressed-skin wingкрыло с управляемой циркуляциейaugmentor wingкрыло с управляемым пограничным слоемbackswept boundary layer controlled wingлетать с брошенным штурваломfly hand offлетать с выпущенным шассиfly a gear downлетать с убранным шассиfly a gear upлиния при сходе с ВППturnoff curveлиния пути по схеме с двумя спаренными разворотамиrace trackлопасть с шарнирной подвескойarticulated bladeмаршрут вылета с радиолокационным обеспечениемradar departure routeмаршрут прилета с радиолокационным обеспечениемradar arrival routeмаршрут с минимальным уровнем шумаminimum noise routeмаяк с рамочной антеннойloop beaconместо стоянки с твердым покрытиемhardstandметодика выполнения полета с минимальным шумомminimum noise procedureмеханизм реверса с полуцилиндрическими струеотражательными заслонкамиsemicylindrical target-type reverserмодуль с быстроразъемным соединениемplug-in moduleмоноплан с высокорасположенным крыломhigh-wing monoplaneмоноплан с низко расположенным крыломlow-wing monoplaneмуфта сцепления двигателя с несущим винтом вертолетаrotor clutch assemblyнаблюдение с борта воздушного суднаaircraft observationнаблюдение с воздуха1. air survey2. aerial inspection набор высоты с убранными закрылкамиflap-up climbнабор высоты с ускорениемacceleration climbнавигационная система с графическим отображениемpictorial navigation system(информации) небольшой привязной аэростат с тканевым оперениемkytoonнеобратимое управление с помощью гидроусилителейpower-operated controlнерегулируемое сопло с центральным теломfixed plug nozzleнесущий винт с приводом от двигателяpower-driven rotorнесущий винт с шарнирно закрепленными лопастямиarticulated rotorоблачность с разрывамиbroken skyобратимое управление с помощью гидроусилителейpower-boost controlопасно при соприкосновении с водойdanger if wetопасность столкновения с птицамиbird strike hazardопознавать аэродром с воздухаidentify the aerodrome from the airопора с масляным амортизаторомoleo legопределение местоположения с помощью радиосредстваradio fixingопределять местоположение с воздухаindicate the location from the airопрыскивание сельскохозяйственных культур с воздухаaerial crop sprayingопыление с воздухаaerial dustingостановка с коммерческими целями1. traffic stop2. revenue stop остановка с некоммерческими целями1. nontraffic stop2. stopping for nontraffic purpose открытый текст с сокращениямиabbreviated plain languageпарашют с не полностью раскрывшимся куполомstreamerпатрулирование линий электропередач с воздухаpower patrol operationпеленг с учетом направления ветраwind relative bearingперевозка с оплатой в кредитcollect transportationперевозка с предварительной оплатойprepaid transportationперевозки с обеспечениемinterline trafficпередача с землиground transmissionпереходить на управление с помощью автопилотаswitch to the autopilotперрон с искусственным покрытиемpaved apronпилотировать с помощью автоматического управленияfly automaticallyпилотировать с помощью штурвального управленияfly manuallyплан полета, переданный с бортаair-filed flight planпневматическая шина с армированным протекторомtread-reinforced tireпогрузчик с двумя платформамиdouble-deck loaderподхожу к четвертому с левым разворотомon the left base legпоиск с воздухаair searchпокрышка с насечкойribbed tireполет в связи с особыми обстоятельствамиspecial event flightполет для выполнения наблюдений с воздуха1. aerial survey flight2. aerial survey operation полет для контроля состояния посевов с воздухаcrop control operationполет для ознакомления с местностьюorientation flightполет по сигналам с землиdirected reference flightполет с боковым ветромcross-wind flightполет с визуальной ориентировкойvisual contact flightполет с выключенным двигателемengine-off flightполет с выключенными двигателямиpower-off flightполет с дозаправкой топлива в воздухеrefuelling flightполет с инструктором1. dual operation2. dual flight полет с креномbanked flightполет с набором высоты1. nose-up flying2. climbing flight полет с несимметричной тягой двигателейasymmetric flightполет с обычным взлетом и посадкойconventional flightполет с отклонениемdiverted flightполет с парированием сносаcrabbing flightполет с пересечением границborder-crossing flightполет с помощью радионавигационных средствradio navigation flightполет с попутным ветромtailwind flightполет с посадкойentire journeyполет с постоянным курсомsingle-heading flightполет с промежуточной остановкойone-stop flightполет с работающим двигателемengine-on flightполет с работающими двигателями1. power-on flight2. powered flight полет с сопровождающимchased flightполет с убранными закрылкамиflapless flightполет с уменьшением скоростиdecelerating flightполет с ускорениемaccelerated flightполет с целью перебазированияpositioning flightполет с целью установления координат объекта поискаaerial spotting operationполет с частного воздушного суднаprivate flightполеты с использованием радиомаяковradio-range flyположение с высоко поднятой носовой частью фюзеляжаhigh nose-up attitudeполучать информацию с помощью регистратораobtain from recorderпорыв ветра с дождемblirtпосадка по командам с земли1. ground-controlled landing2. talk-down landing посадка с автоматическим выравниваниемautoflare landingпосадка с асимметричной тягойasymmetric thrust landingпосадка с боковым сносомlateral drift landingпосадка с визуальной ориентировкойcontact landingпосадка с выкатываниемovershooting landingпосадка с выполнением полного круга заходаfull-circle landingпосадка с выпущенным шасси1. wheels-down landing2. gear-down landing посадка с использованием реверса тягиreverse-thrust landingпосадка с коротким пробегомshort landingпосадка с немедленным взлетом после касанияtouch-and-go landingпосадка с неработающим воздушным винтомdead-stick landingпосадка с отказавшим двигателем1. dead-engine landing2. engine-out landing посадка с парашютированиемpancake landingпосадка с повторным ударом после касания ВППrebound landingпосадка с полной остановкойfull-stop landingпосадка с помощью ручного управленияmanlandпосадка с превышением допустимой посадочной массыoverweight landingпосадка с прямойstraight-in landingпосадка с работающим двигателемpower-on landingпосадка с убранными закрылкамиflapless landingпосадка с убранным шасси1. wheels-up landing2. belly landing 3. fear-up landing посадка с упреждением сносаtrend-type landingпосадка с частично выпущенными закрылкамиpartial flap landingпосадка с этапа планированияglide landingпосадочная площадка с естественным покрытиемnatural airfieldпосадочная площадка с искусственным покрытиемsurfaced airfieldпосадочная площадка с травяным покрытием1. turf airfield2. grass airfield 3. grass landing area пояс с уголкомangle capпредкрылок с гидроприводомhydraulic slatпроисшествие с воздушным судномaccident to an aircraftпроисшествие, связанное с перевозкой опасных грузовdangerous goods occurrenceпрокладка маршрута с помощью бортовых средств навигацииaircraft self routingпротивопожарное патрулирование с воздухаfire control operationпрыгать с парашютомjump with parachuteпрыжки с парашютомparachute jumpingрадиолокатор с большой разрешающей способностьюfine grain radarрадиолокатор с импульсной модуляциейpulse-modulated radarрадиолокатор с остронаправленным лучомpencil beam radarрадиолокационное наблюдение с помощью зондаradarsonde observationразворот с внутренним скольжениемslipping turnразворот с креномbanked turnразворот с креном к центру разворотаinside turnразворот с креном от центра разворотаoutside turnразворот с набором высотыclimbing turnразворот с наружным скольжениемskidding turnразворот с помощью элероновbank with aileronsразворот с упреждениемlead-type turnразворот с целью опознаванияidentifying turnразрешение на заход на посадку с прямойclearance for straight-in approachраспространять с помощью телетайпаdisseminate by teletypewriterрасходы, связанные с посадкой для стыковки рейсовlayover expensesреактивное воздушное судно с низким расходом топливаeconomical-to-operate jetlinerреактивное сопло с центральным теломplug jet nozzleредуктор с неподвижным венцомstationary ring gearрежим работы с полной нагрузкойfull-load conditionsрейс с гражданского воздушного суднаcivil flightрейс с обслуживанием по первому классуfirst-class flightрейс с пересадкойtransfer flightс автоматическим управлениемself-monitoringсбиваться с курса1. wander off the course2. become lost сближение с землейground proximityсвидетельство с ограниченным сроком действияexpiry-type licenseсвязь по запросу с бортаair-initiated communicationсеть передачи данных с пакетной коммутациейpacket switched data networkсеть с высокой пропускной способностьюhigh level networkсигнализация об опасном сближении с землейground proximity warningсигнализация самопроизвольного ухода с заданной высотыaltitude alert warningсигнал с применением полотнищаpaulin signalсистема визуального управления стыковкой с телескопическим трапомvisual docking guidance systemсистема пожаротушения с двумя очередями срабатыванияtwo-shot fire extinguishing systemсистема предупреждения опасного сближения с землейground proximity warning systemсистема предупреждения столкновения с проводами ЛЭПwire collision avoidance systemсистема привода с постоянной скоростьюconstant speed drive systemсистема распыления с воздухаaerial spraying system(например, удобрений) система с тройным резервированиемtriplex systemсистема управления с обратной связьюfeedback control systemскидка с тарифа1. reduction on fare2. fare taper скидка с тарифа за дальностьdistance fare taperскорость захода на посадку с убранной механизацией крылаno-flap - no-slat approach speedскорость захода на посадку с убранными закрылкамиno-flap approach speedскорость захода на посадку с убранными предкрылкамиno-slat approach speedскорость набора высоты с убранными закрылками1. no-flap climb speed2. flaps-up climbing speed 3. flaps-up climb speed скорость схода с ВППturnoff speedс крыльямиwingedслой атмосферы с температурной инверсиейlidс момента ввода в эксплуатациюsince placed in serviceс набором высотыwith increase in the altitudeснижение с работающим двигателемpower-on descentснижение с работающими двигателямиpower-on descend operationс низко расположенным крыломlow-wingснимать груз с бортаtake off loadснимать с замковunlatchснимать с упора шагаunlatch the pitch stop(лопасти воздушного винта) снимать с эксплуатации1. take out of service2. with-draw from service снимать шасси с замкаrelease the landing gear lockснимать шасси с замковunlatch the landing gearснимать шасси с замков убранного положенияrelease the landing gearсносить с курсаdrift off the courseснятие воздушного судна с эксплуатацииaircraft removal from serviceснятый с эксплуатацииobsoleteсобытие, связанное с приземлением и немедленным взлетомtouch-and-go occurrenceсоединение крыла с фюзеляжемwing-to-fuselage jointсообщение с бортаair-reportсоосное кольцевое сопло с обратным потокомinverted coannular nozzleсоосное сопло с центральным теломcoannular plug nozzleсопло с косым срезомskewed jet nozzleсопло с многорядными шумоглушащими лепесткамиmultirow lobe nozzleсопло с реверсом тягиthrust-reverse nozzleсопло с регулируемым сечениемvariable area nozzleсопло с сеткойgaze nozzleсопло с центральным теломbullet-type nozzleс передней центровкойbow-heavyс приводом от двигателяpower-operatedспуск с парашютомparachute descentс регенеративным охлаждениемself-cooled(о системе) с системой автоматической смазки, автоматически смазывающийсяself-lubricationсталкиваться с препятствиемfail to clearс тенденцией к пикированиюnose-heavyстолкновение птиц с воздушным судномbird strike to an air craftстолкновение с огнями приближенияapproach lights collisionстолкновение с птицамиbirds collisionстрагивать с местаmove off from the restстремянка с гофрированными ступенькамиsafety-step ladderстроительные работы с помощью авиацииconstruction work operationsс убранной механизациейcleanс убранными закрылкамиflaplessсхема захода на посадку по командам с землиground-controlled approach procedureсхема полета с минимальным расходом топливаfuel savings procedureсхема с минимальным расходом топливаeconomic patternсходить с ВППturn offс целью набора высотыin order to climbсцепление колес с поверхностью ВППrunway surface frictionтариф для перевозки с неподтвержденным бронированиемstandby fareтариф на полет с возвратом в течение сутокday round trip fareтелеграфное обслуживание с дистанционным управлениемremote keying serviceтележка с баллонами сжатого воздухаair bottle cartтопливозаправщик с цистернойfuel tank trailerтраектория захода на посадку с прямойstraight-in approach pathтраектория полета с предпосылкой к конфликтной ситуацииconflicting flight pathтрафарет с инструкцией по применениюinstruction plateтрафарет с подсветомlighted signтрафарет с торцевым подсветомedge-lit sign(в кабине экипажа) тренажер с подвижной кабинойmoving-base simulatorтренировочный полет с инструкторомtraining dual flightтурбина с приводом от выхлопных газовpower recovery turbineтурбина с приводом от набегающего потокаram-air turbineтурбовентиляторный двигатель с высокой степенью двухконтурностиhigh-bypass fanjetтурбовентиляторный двигатель с низким расходомlow-consumption fanjetуказатель с перекрещивающимися стрелкамиcross-pointer indicatorуказатель ухода с курсаoff-course indicatorуменьшение опасности столкновения с птицамиbirds hazard reductionуменьшение тяги с целью снижения шумаnoise abatement thrust cutbackуплотнение с помощью поршневого кольцаpiston-ring type sealуплотнение с частотным разделениемfrequency-division multiplexingуправление креном с помощью аэродинамической поверхностиaerodynamic roll controlуправление с помощью автопилотаautopilot controlуправление с помощью аэродинамической поверхностиaerodynamic controlуправление с помощью гидроусилителей1. assisted control2. powered control управляемый с помощью радиолокатораradar-directedуправлять рулями с помощью электроприводовfly by wireусловия с использованием радиолокационного контроляradar environmentустройство для замера сцепления колес с поверхностьюsurface friction testerуходить с глиссадыbreak glideуходить с заданного курсаdrift off the headingуходить с заданной высотыleave the altitudeуходить с набором высоты1. climb out2. climb away уход на второй круг с этапа захода на посадкуmissed approach operationуход с набором высотыclimbawayучасток маршрута с набором высотыupward legучасток маршрута с обратным курсомback legучебный полет с инструкторомinstructional dual flightфильтр с автоматической очисткой1. depolluting filter2. self-cleaning filter фильтр с защитной сеткойgauze strainerфюзеляж с работающей обшивкойstressed skin-type fuselageфюзеляж с сечением из двух окружностейdouble-bubble fuselageчартерный рейс в связи с особыми обстоятельствамиspecial event charterчартерный рейс с полной загрузкой1. whole-plane charter2. plane-load charter чартерный рейс с предварительным бронированием местadvance booking charterчартерный рейс с промежуточной посадкойone-stop charterчартерный рейс с пропорциональным распределением доходовpro rata charterшасси с использованием скоростного напораwind-assisted landing gearшасси с ориентирующими колесамиcastor landing gearшасси с хвостовой опоройtailwheel landing gearштанга с распыливающими насадкамиspray boomштуцер с жиклеромorifice connectionэвакуация воздушного судна с места аварииaircraft salvageэксплуатация с перегрузкойoverload operationэксплуатировать в соответствии с техникой безопасностиoperate safetyэлерон с аэродинамической компенсациейaerodynamically-balancedэлерон с весовой компенсациейmass-balanced aileronэлерон с внутренней компенсацией1. internally-balanced aileron2. sealed-type элерон с дифференциальным отклонениемdifferential aileronэлерон с жестким управлением от штурвалаmanual aileronэлерон с зависаниемdropped aileronэлерон с компенсациейbalanced aileronэлерон с приводом от гидроусилителяpowered aileronэлерон с роговой компенсациейhorn-balanced aileron88 маршрутизатор
89 шлюз ЛВС-Х.25
- X.25 gateway
- LAN
шлюз ЛВС-Х.25
Со стороны подключения к ЛВС шлюз является одной из ее рабочих станций и для каждого пользователя ЛВС, получающего доступ к информационной сети, создается соответствующий управляющий блок. Со стороны информационной сети шлюз представляет собой ООД и каждому сетевому соединению ЛВС-Х.25 соответствует виртуальное соединение на стыке «шлюз – сеть Х.25». Основные функции шлюза ЛВС-Х.25: преобразование адресов, согласование размеров протокольных блоков данных, скоростей передачи данных, механизмов управления потоком данных, поддержка функций маршрутизации и ряд других процедур.
[Е.С.Алексеев, А.А.Мячев. Англо-русский толковый словарь по системотехнике ЭВМ. Москва 1993]Тематики
EN
- X.25 gateway
- LAN
Русско-английский словарь нормативно-технической терминологии > шлюз ЛВС-Х.25
90 линия
линия сущstreamline(воздушного потока) агона, линия нулевого магнитного склоненияagonic lineаэродром местных воздушных линийdomestic aerodromeбазовая линия крылаwing base lineблок индикатора отклонения от линии путиacross track display unitбоковая линияlateral lineвихрь в направлении линии полетаline vortexвоздушная линияair lineвоздушное судно местных воздушных линийcommuter-size aircraftвосстанавливать заданную линию путиreestablish the trackвывод на линию путиtracking guidanceвыравнивание в линию горизонтаlevelling-offвыходная линияoutbound linkдроссельный пакет линии управления приемистостьюacceleration control line flow restrictorзаданная линия путиintended trackзапасная линияalternate linkзаход на посадку по осевой линииcenter line approachизменять линию путиchange the trackиндикатор отклонения от линии путиacross track displayкурсовая линияlubber lineлинейный огонь линии предупрежденияclearance bar lightлиния безопасного пролета над препятствиямиobstacle clearance lineлиния безопасности на перронеapron safety lineлиния взлетаtake off lineлиния визированияline of sightлиния входаentry lineлиния выруливанияlead-out lineлиния глиссадыglide slope lineлиния грузовых перевозокall cargo lineлиния дренажаdrain lineлиния заданного пути1. course line2. track reference 3. desired track линия заруливанияlead-in lineлиния заруливания воздушного судна на стоянкуaircraft stand lead-in lineлиния координатной сеткиgrid lineлиния маршрутаrouting lineлиния нагнетанияpressure pipeлиния направления руленияtaxiing direction lineлиния неустойчивого состояния атмосферыinstability lineлиния огней пути руленияsteering barлиния ограничения безопасного расстояния до конца крылаwing tip clearance lineлиния ограничения отклонения от глиссадыglide slope limit lineлиния ограничения препятствийobstacle lineлиния отклонения от курсаcourse curvatureлиния передачиtransmission pathлиния перепуска топливаbypass fuel lineлиния полетаline of flightлиния полета по курсуon-course lineлиния положенияline of positionлиния положения воздушного суднаaircraft position lineлиния положения, определяемая азимутомradialлиния принятия решенияdecision barлиния при сходе с ВППturnoff curveлиния путиtrackлиния пути относительно координатной сеткиgrid trackлиния пути полетаflight trackлиния пути по локсодромииrhumb-line trackлиния пути по схеме с двумя спаренными разворотамиrace trackлиния пути приближенияinbound trackлиния пути при взлетеtakeoff trackлиния пути удаленияoutbound trackлиния пути установленной схемыprocedure trackлиния равных азимутовcurve of equal bearingsлиния радиосвязи1. wireless link2. radio link линия разворотаturning lineлиния разъема1. breakline2. parting line линия разъема крылаwing split lineлиния руления1. taxiing lane2. taxilane 3. guideline линия руления воздушного судна в зоне стоянкиaircraft stand taxilaneлиния руления на место стоянкиparking bay guidelineлиния сборкиassembly lineлиния световых огней зоны приземленияtouchdown zone barretteлиния сигнальных огнейlights barretteлиния стоп1. stop bar2. stop bar position 3. stop line 4. stop sign линия технологического разъемаproduction breaklineлиния технологического разъема воздушного суднаaircraft production break lineлиния тягиtrust axisлиния уровня глазeye level pathлиния установкиalignment barлиния хордыchord lineлиния хорды крылаwing chord lineлиния центрального ряда линейных огнейbarrette center lineлиния циркулярной связиconference bridgeмагистральная воздушная линияhighwayмагнитная ортодромическая линия путиmagnetic great circle trackмаркировка осевой линии ВППrunway centerline markingмаркировка осевой линии ожидания рулежной дорожкиtaxiway centerline markingмасло линии нагнетанияfeed oilместная линияshort-stage routeнавигация по линии равных азимутовconstant-bearing navigationназемная линия связиlandlineнаклонная линия курсаslant course lineобозначать осевую линиюidentify the center lineогни линии стопstop bars lightsогни линии стоп двустороннего действияbidirectional stop bar lightsогни осевой линии ВППrunway centerline lightsогни продолжения осевой линииextended centerline lightsортодромическая линияgreat circle lineосевая линияcenterlineосевая линия воздушного суднаaircraft center lineосевая линия ВППrunway centerlineосевая линия маршрутаroute centerlineотклонение от линии горизонтального полетаdeviation from the level flightотклонение от линии путиacross-track displacementпатрулирование линий электропередач с воздухаpower patrol operationперевозчик на магистральной линииtrunk carrierпогрешность залегания средней линии глиссадыmean glide path errorпогрешность залегания средней линии курсаmean course errorположение на линии исполнительного стартаtakeoff positionпригодность для полета на местных воздушных линияхlocal availabilityравносигнальная линия глиссадыequisignal glide pathрадиальная линияradialразрешение на эксплуатацию воздушной линииroute licenseразъемный клапан линииline-disconnect valveрезкий отворот от линии курсаbreakaway manoeuvreсеть авиационных линийairline networkсистема линий сливаreturn line system(рабочей жидкости в бак) система наземных линий связиlandline systemспутниковая линия передачи данныхsatellite linkсредняя линия аэродинамического профиляairfoil center lineтелетайп наземной линии связиlandline teletypewriterтелетайпная линияteleprinter lineфактическая линия путиtrue trackхарактеристики наведения по линии путиtrack-defining characteristicsэффект сплошной линииlinear effect91 ATM-ячейка
nIT. ATM-Zelle (блок данных небольшого фиксированного размера (53 байта), используемый для передачи данных в АТМ-сетях)92 канал связи
1. transmission link2. communication linkсредство информации; средство связи — communication medium
3. communications link4. data channel5. information bearer channel6. information channelканал прямой связи; прямой канал — forward channel
7. channel8. circuit9. communication bus10. communication channel11. link12. trunk13. liaison channelканал связи; информационный канал — communication channel
93 линия связи
1. transmission link2. communication link3. communications link4. circuit5. communication lineсредство информации; средство связи — communication medium
6. link7. communications links8. flowline94 автоматический
автоматическая аэродромная радиолокационная системаautomated radar terminal systemавтоматическая балансировкаself-balanceавтоматическая бортовая система управленияautomatic flight control systemавтоматическая информация в районе аэродромаautomatic terminal informationавтоматическая коррекция ошибокautomatic error correctionавтоматическая метеостанцияautomatic weather stationавтоматическая настройкаself-aligningавтоматическая обработка данныхautomatic data processingавтоматическая посадка1. automatic landing2. autoland автоматическая прокладка маршрутаself-routingавтоматическая регулировка усиленияautomatic gain controlавтоматическая система объявления тревогиautoalarm systemавтоматическая смазкаself-oilingавтоматическая установка закрылковautomatic flap positioningавтоматический вводautomatic inputавтоматический заход на посадку1. automatic approach2. autoapproach автоматический контрольself-testавтоматический контроль траекторииautomatic path controlавтоматический курсографautomatic plotterавтоматический пеленгаторautomatic direction finderавтоматический полет1. automatic flight2. computer-directed flight автоматический регулятор температуры выходящих газовautomatic exhaust temperature controlавтоматическое бронирование местautomatic seat reservationавтоматическое выравнивание воздушного судна перед посадкойautoflareавтоматическое измерение дальностиautomatic range measurementавтоматическое измерение угла превышенияautomatic elevation measurementавтоматическое парирование сносаautomatic decrabавтоматическое радиопеленгационное оборудованиеautomatic direction-finding equipmentавтоматическое реверсированиеforced reversingавтоматическое регулирование громкостиautomatic volume controlавтоматическое регулирование заправкиself-primingавтоматическое регулирование наддуваautomatic boost controlавтоматическое сигнальное устройствоautomatic signalling deviceавтоматическое сопровождение по дальностиautomatic range trackingавтоматическое управлениеautomatic controlавтоматическое управление полетомautomatic flight controlавтоматическое управление уровнемautomatic level controlавтоматическое флюгирование1. automatic feathering2. autofeathering автоматическое флюгирование по отрицательной тягеdrag-actuated autofeatheringавтоматическое флюгирование по предельным оборотамoverspeed-actuated autofeatheringавтоматическое флюгирование при падении крутящего моментаpositive torque drop autofeatheringблок автоматического определения дальностиautomatic range unitвоздушный винт с автоматической регулировкойautomatically controllable propellerвычислитель параметров автоматического ухода на второй кругauto go around computerдальность автоматического сопровожденияautotracking rangeдублированная система автоматического управления посадкойdual autoland systemкомплексная автоматическая системаintegrated automatic systemоборудование автоматического управления полетомautomatic flight control equipmentоборудование автоматической передачи данныхautomatic data transfer equipmentоборудование автоматической стабилизацииautomatic stabilization equipmentпилотировать с помощью автоматического управленияfly automaticallyпосадка с автоматическим выравниваниемautoflare landingрежим автоматической посадкиautoland modeс автоматическим управлениемself-monitoringсигнал автоматического парирования сносаautomatic decrab signalсистема автоматического захода на посадкуautomatic approach systemсистема автоматического контроля1. automatic test system2. automatic monitor system система автоматического парирования кренаbank counteract system(при отказе одного из двигателей) система автоматического управленияrobot-control system(полетом) система автоматического управления параллельной работой генераторовgenerator autoparalleling systemсистема автоматической посадки1. autoland system2. automatic landing system система автоматической сигнализации углов атаки, скольжения и перегрузокangle-of-attack, slip and acceleration warning systemсистема автоматической стабилизацииautomatic stabilization system(воздушного судна) с системой автоматической смазки, автоматически смазывающийсяself-lubricationустройство автоматического сопровожденияautomatic range trackerфильтр с автоматической очисткой1. depolluting filter2. self-cleaning filter95 БДС
96 BPU
BitBit processing unit — процессор BitBit, процессор блочной передачи ( данных изображений); см. также BitBLT97 элемент задержки
1. time-delay element2. time-lag element3. delay componentтриггер с задержкой; ждущий мультивибратор — delay flip-flop
4. delay device5. delay elementзадержка в работе; операционная задержка — operating delay
транзитная задержка; задержка транзита — delay in transit
6. delay unitРусско-английский большой базовый словарь > элемент задержки
98 оборудование
оборудование сущequipmentаварийное оборудованиеemergency equipmentаварийное светосигнальное оборудованиеemergency lightingаварийно-спасательное оборудование1. life-saving equipment2. survival equipment 3. emergence escape equipment 4. safety equipment авиационное оборудованиеaeronautical equipmentавтоматизированное оборудованиеautomated equipmentавтоматическое радиопеленгационное оборудованиеautomatic direction-finding equipmentаэродромное навигационное оборудованиеterminal navigation facilitiesаэродромное светосигнальное оборудованиеaerodrome lightingблок связи с радиолокационным оборудованиемradar coupling unitбортовое метеорологическое оборудованиеairborne weather equipmentбортовое навигационное оборудованиеaircraft navigation equipmentбортовое оборудование1. aircraft equipment2. airborne equipment бортовое оборудование зональной навигацииarea navigation equipmentбортовое поисковое оборудованиеairborne search equipmentбортовое связное оборудованиеaircraft communication equipmentбортовое стационарное оборудованиеaircraft fixed equipmentбортовое съемное оборудованиеstoresбортовое электронное оборудованиеairborne avionicsбуфетно-кухонное оборудованиеcatering equipmentбытовое оборудованиеdomestic equipmentвыставка технического оборудования для обслуживания воздушных судовaircraft maintenance engineering exhibitionдальномерное оборудованиеdistance measuring equipmentзакупка оборудованияequipment procurementзаменять оборудование воздушного суднаreequip an aircraftинженер по радиоэлектронному оборудованиюradio engineerинженер по электронному оборудованиюelectronics engineerиспытательное оборудованиеtest equipmentкислородное оборудованиеoxygen dispensing equipmentкомплект аварийно-спасательного оборудованияair rescue kitкомплект оборудования для заправки и слива топливаrefuelling unitкомплект оборудования для удаления воздушного суднаaircraft recovery kitкомплект светотехнического оборудования ВППrunway lighting unitнавигационное оборудованиеnavaidsнавигационное оборудование инерциального типаinertial navigational equipmentназемное оборудованиеground equipmentназемное оборудование для обслуживанияground service equipmentнекомплектное оборудованиеloose equipmentнесъемное оборудованиеfixed equipmentнивелировочное оборудованиеrigging equipmentоборудование автоматического управления полетомautomatic flight control equipmentоборудование автоматической передачи данныхautomatic data transfer equipmentоборудование автоматической стабилизацииautomatic stabilization equipmentоборудование безэховой аэродинамической трубыunechoic wind tunnel facilitiesоборудование воздушных трассairways facilitiesоборудование встроенного контроляbuilt-in test equipmentоборудование глиссадной системыglide-path equipmentоборудование дистанционного управленияremote control equipmentоборудование для аварийного приводненияditching equipmentоборудование для буксировки планераglider tow equipmentоборудование для демонстрационных полетовsign towing equipmentоборудование для загрузки1. cargo-loading equipment2. loading equipment оборудование для запуска планераglider launch equipmentоборудование для измерения высоты облачностиceiling measurement equipmentоборудование для испытанияtest facilitiesоборудование для крепления грузаcargo tie-down deviceоборудование для обеспечения захода на посадкуapproach facilitiesоборудование для обнаружения турбулентностиturbulence detection equipmentоборудование для обслуживания воздушного суднаaircraft servicing equipmentоборудование для обслуживания грузовcargo-handling equipmentоборудование для обслуживания пассажировpassenger-handling equipmentоборудование для полетов в темное время сутокnight-flying equipmentоборудование для полетов по приборамblind flight equipmentоборудование для снижения шумаhush kitоборудование для технического обслуживанияmaintenance facilitiesоборудование дозировкиmetering equipmentоборудование зоны посадкиlanding area facilitiesоборудование кабины экипажаcockpit equipmentоборудование коммутацииchange-over equipmentоборудование места стоянкиramp facilitiesоборудование места стоянки воздушного суднаaircraft parking equipmentоборудование наведенияguidance equipmentоборудование повышенной надежностиreliable equipmentоборудование подогрева карбюратораcarburetor heat equipmentоборудование предупреждения столкновенийcollision warning equipmentоборудование системы кондиционированияair-conditioning equipmentоборудование системы контроля окружающей средыenvironmental control system equipmentоборудование стойки регистрации багажаbaggage check-in facilitiesоборудование таможенного досмотраclearance facilitiesоборудование циркулярной связиconference facilitiesосветительное оборудование воздушного суднаaircraft electrificationотсек оборудованияequipment compartmentотсек электронного оборудованияavionics compartmentпереносное бортовое оборудованиеaircraft portable equipmentперечень необходимого бортового оборудованияmaster minimum equipment listперечень необходимого исправного оборудования для полетаminimum equipment itemпогрешность бортового оборудованияairborne equipment errorподвесное оборудованиеsuspended equipmentподъемное оборудованиеhoisting provisionsподъемно-транспортное оборудованиеlifting and transporting equipmentприборное оборудование воздушного суднаaircraft hardwareпротивопожарное оборудованиеfire fighting equipmentпротивоугонное оборудованиеsecurity equipmentрадиолокационное оборудованиеradar facilitiesрадиоэлектронное оборудованиеavionies equipmentраспыление подвесным оборудованиемsuspended spraying(с вертолета) резервное оборудованиеstandbyрезервное оборудование воздушного суднаaircraft standby facilitiesремонтное оборудованиеrepair facilitiesремонт оборудования воздушного суднаaircraft equipment overhaulручное аварийно-спасательное оборудованиеhand safety equipmentсамолетное оборудованиеaeroplane equipmentсанитарное оборудованиеwaste equipmentсветосигнальное оборудованиеlightingсветосигнальное оборудование авиалинииairway lightingсветосигнальное оборудование аэродрома для обеспечения безопасностиaerodrome security lightingсветосигнальное оборудование ближней зоны приближенияinner approach lightingсветосигнальное оборудование ВППrunway lightingсветосигнальное оборудование концевой полосы торможенияstopway lightingсветотехническое оборудованиеlighting facilitiesсистема светосигнального оборудования летного поляairfield lighting systemсистема энергопитания оборудованияaccessory power systemскладское оборудование аэропортаairport storage facilitiesснегоочистительное оборудование1. snow removal equipment2. snow clearing equipment спасательное оборудование1. recovery equipment2. rescue equipment списание оборудованияequipment final disposalсхема размещения наземных средств и оборудованияfacility chartтопливозаправочное оборудованиеfueling equipmentугломерное оборудованиеangle measurement equipmentучебно-тренировочное оборудованиеtraining aidsэксплуатация оборудования аэропортаairport facilities operationэлектронное оборудование1. avionics2. electronic device99 информационное ядро
( блок приема-передачи модулированных данных) data-pumpРусско-английский словарь по вычислительной технике и программированию > информационное ядро
100 телеграмма
(блок данных, предназначенный для срочной передачи) telegramРусско-английский словарь по вычислительной технике и программированию > телеграмма
СтраницыСм. также в других словарях:
блок передачи данных — — [Е.С.Алексеев, А.А.Мячев. Англо русский толковый словарь по системотехнике ЭВМ. Москва 1993] Тематики информационные технологии в целом EN data communication unitDCU … Справочник технического переводчика
основной блок передачи данных — — [Е.С.Алексеев, А.А.Мячев. Англо русский толковый словарь по системотехнике ЭВМ. Москва 1993] Тематики информационные технологии в целом EN basic transmission unitBTU … Справочник технического переводчика
терминальный блок передачи данных — — [Е.С.Алексеев, А.А.Мячев. Англо русский толковый словарь по системотехнике ЭВМ. Москва 1993] Тематики информационные технологии в целом EN data transmission terminal unitDTTU … Справочник технического переводчика
функциональный блок передачи данных — — [http://www.iks media.ru/glossary/index.html?glossid=2400324] Тематики электросвязь, основные понятия EN data communications function blockDCF … Справочник технического переводчика
блок накопления данных — Совокупность технических средств, содержащая накопители данных, средства управления накопителями, средства приема, коммутации, распределения и передачи сигналов, обеспечивающая запись и воспроизведение больших массивов данных с произвольным… … Справочник технического переводчика
блок накопления данных — 378 блок накопления данных: Совокупность технических средств, содержащая накопители данных, средства управления накопителями, средства приема, коммутации, распределения и передачи сигналов, обеспечивающая запись и воспроизведение больших массивов … Словарь-справочник терминов нормативно-технической документации
блок канала передачи данных — — [Я.Н.Лугинский, М.С.Фези Жилинская, Ю.С.Кабиров. Англо русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.] Тематики электротехника, основные понятия EN data link unit … Справочник технического переводчика
ГОСТ Р 50434-92: Устройства числового программного управления для металлообрабатывающего оборудования. Производственный канал асинхронной передачи данных и физический уровень. Полудуплексная передача данных — Терминология ГОСТ Р 50434 92: Устройства числового программного управления для металлообрабатывающего оборудования. Производственный канал асинхронной передачи данных и физический уровень. Полудуплексная передача данных оригинал документа: 2.2.… … Словарь-справочник терминов нормативно-технической документации
линия (звено) передачи данных — Физический блок вложенной сети, обеспечивающий соединение для передачи данных между смежными узлами. (МСЭ Т J.112, МСЭ Т J.122, МСЭ R F.1499). [http://www.iks media.ru/glossary/index.html?glossid=2400324] Тематики электросвязь, основные понятия… … Справочник технического переводчика
блок данных — блок Битовая последовательность, передаваемая как единое целое между устройствами вычислительной системы, системы телеобработки данных или вычислительной сети. [ГОСТ 20886 85] [ГОСТ 24402 88] блок данных Последовательность битов, имеющая… … Справочник технического переводчика
блок управления дистанционной обработкой данных — мультиплексор передачи данных — [Л.Г.Суменко. Англо русский словарь по информационным технологиям. М.: ГП ЦНИИС, 2003.] Тематики информационные технологии в целом Синонимы мультиплексор передачи данных EN telecommunication control unitTCU … Справочник технического переводчика
 18+© Академик, 2000-2024
18+© Академик, 2000-2024- Обратная связь: Техподдержка, Реклама на сайте
Экспорт словарей на сайты, сделанные на PHP, Joomla, Drupal, WordPress, MODx.
Перевод: с русского на все языки
со всех языков на русский- Со всех языков на:
- Русский
- С русского на:
- Все языки
- Английский
- Итальянский
- Немецкий
- Французский